High Efficiency Permanent Magnet Drive Systems for Electric Vehicles

of 6
-
Upload
jalilemadi -
Category
Documents
-
view
218 -
download
0
Transcript of High Efficiency Permanent Magnet Drive Systems for Electric Vehicles
-
8/10/2019 High Efficiency Permanent Magnet Drive Systems for Electric Vehicles
1/6
High Efficiency Permanent Magnet rive Systems for Electric Vehicles
D. J. Patterson
Centre or Energy Studies, Northern Territory University, Darwin NT 0909 Australia
Phone +61 8 89 466389, Fax +61 8 89 466993, e-mail:-
Abstract his paper discusses the recent history of the
development of Electric Vehicles EVs), and the range of
traction systems in use. A case is made for permanent magnet
machines
PMs),
particularly those using axial flux geometry.
The speed limitation of PMs is addressed, and two simple
methods of surmounting this limitation are presented. Issues in
axial flux machine design relevant to the pursuit of very high
efficiency are presented. The development of a very high
efficiency hard switched controller is discussed, where the
specific requirements of the drive system allow substantial
reduction of switching rates, thus allowing stringent control of
switching losses
I
INTRODUCTION
A. E
V
Background
The first phase of recent research into electric vehicles
(EVs) began in the
70s
prompted by sudden increases in oil
prices. This phase waned gradually as the most pessimistic
projections of ultimate price and depletion of known
resources did not eventuate.
The second phase, driven by urban air pollution concerns,
began with the California Air Resources Board 1990 mandate
which has now also been adopted by three north eastem
states in the USA. This phase has already resulted in the
recent availability of the General Motors EV1 for lease in the
states of California and Arizona. Several other large
manufacturers are about to enter the market. Whilst the
mandate has been modified
in
some areas, the 2003 targets
remain.
Urban air pollution concerns are now moving out of the
United States. The Northern Territory Universitys own small
Indonesian Vehicle project, in association with the
Indonesian government Agency for the Assessment
of
Technology (BPPT), aimed at use in central Jakarta, is but
one example of small project work going on in many of the
huge population centres
of
the world such as Cairo, New
Delhi, a nd Bangkok.
The significant problem with these vehicles is that in
attempting to mimic the range performance of competing
internal combustion engine technology in conventional
vehicles (CVs), very large, expensive, heavy and short lived
battery packs have resulted, whilst still not achieving genuine
comparability with CVs. This has resulted in considerable
research in to hybrid vehicles, which have both a heat engine
and an electric motor, and a lesser amount
of
storage.
Such hybrids, in their many configurations promise the
most likely solutions for completely acceptable general
transportation in the near future. [l ], [2], [3].
Third and fourth phases are now gathering momentum.
The third is driven by global warming concerns, since road
transport, mainly cars,
is
the fastest growing and otherwis
most
intractable source of carbon dioxide releases
[4].
Wher
electricity is generated from natural gas, as it is in th
Northern Territory, Australia, significant greenhouse ga
reductions are possible by using EVs in place of CVs [ 5 ] ,[ 6
The fourth phase is driven by power supply authoritie
word wide, who are seeing EVs as an opportunity to se
more product, and to do so when the major loads on suppl
are not present, ie in the evening.
B.
Traction System Backg round
There are now three types of machine under consideratio
for
EVs;
induction machines
(IMs),
permanent magne
machines (PMs), and to a lesser extent switched reluctanc
machines (SRs) [7], [SI. IMs have been chosen for thei
reliability, long history
of
industrial operation, and low co
by, for instance, General Motors or the GM EVl and b
Ford [9],
[ l o ] .
However the lower weight and highe
efficiency of PMs, together with substantial reductions in th
cost of rare earth magnets, is attracting a large proportion o
current research activity [Ill, [12], [13], [14], [l5], [16]
This paper, while covering EV issues in general wil
discuss as an example an in the wheel permanent magne
brushless axial flux drive system or a solar powe red vehicl
for an international race [20]. Whilst solar powered vehicle
will never come into general use because of the very low
power available (approximately 1 kW), the design pressure
on weight, efficiency, and reliability are producin
theoretical analyses, power electronic processing system
motors and drives with wide applicability in the general are
of electric and hybrid vehicles.
Fig. 1 shows the Northern Territory University entry o
the road during the 1996 World Solar Challen ge in Australia
SRs are under consideration or a range of auxiliar
machines, generators, starters, power steering drives, etc an
are discussed as possibly producing similar efficiencie
compared with PMs at less cost. Whilst many researchers ar
~ 1 ,9 1 .
Fig 1 The
Fuji
- Xerox Desert Rose on the road during the 1996 World
Solar Challenge
0-7803-3932-0
39 1
Authorized licensed use limited to: KING SAUD UNIVERSITY. Downloaded on October 27, 2009 at 17:40 from IEEE Xplore. Restrictions apply.
-
8/10/2019 High Efficiency Permanent Magnet Drive Systems for Electric Vehicles
2/6
aware of the benefits
of SRs
[4], as yet little has been
published on their use for traction.
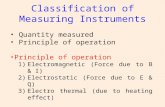
The single significant problem with PMs is their speed
limitation, determined by battery voltage. For a given supply
voltage the machine has a rectangular torque speed
characteristic a s sketched in Fig. 2, which is considerably
different from that generally considered as desirable
ix
traction and
EV
work.
Most vehicle drive systems (eg automobiles, diesel electric
trains) have an instantaneous power limitation not present in
electric vehicles. This implies a reduction in the achievable
torque as speed increases, known as operation in the constant
horsepower region. This is extended over the very large
speed range required of vehicles by gearboxes or automatic
transmissions, allowing considerably higher speeds at lowier
torques. That this characteristic is desirable is in part
simply due to experience, since the concept of a vehicle
which slows up for gradients, but can negotiate very steep
inclines at low speeds is very much imprinted on human
experience. However much research in this area has
highlighted the reduction in torque expected at higher speed,
in terms of required profiles, and the high acceleration
required at low speeds in urban travel [21].
Much research has been aimed at extending the speed
range of PMs into the so called flux weakening regime.
Two novel approaches addressing this specific concern
[141,[151.
will be presented in this paper.
C. Signi jkance
of
System Eficiency
There is a substantial difference between the peak or rated
system efficiency of a traction system as recorded in the
laboratory, and that achieved under normal driving
conditions.
Recent work has reported on an EV with a
motor/controller syste c. ith an efficiency at rated speed and
power of 92%. In simulations, this vehicle was put cyclically
through a four mode operation, (i) 12.5 km/h for 20 sec, (li)
acceleration to 52 k m k over 11 sec, (iii) hold for 30 sec., (iv)
then braking, using regeneration),
to
the low speed over 19
sec. The simulation showed that over 60% of the energy used
was consumed by motor and controller losses [181.
Attempts to build totally electric vehicles quite rapidly
focus the mind on the efficiency of the all parts of the
vehicle, including the rapidly proliferating subsidiary
Continuous capability,
l /
rushless DC
motor
Desirable
Torque characteristic for
-~
Speed
Fig. 2. Torque-speed characteristics for various drives.
electrical systems, from entertainment through
airconditioning to active suspension [22]. The pressures on
such systems to achieve very high efficiencies are
dramatically increased when the only source of energy is on
board electrical storage.
D. Race Background
The World Solar Challenge is a race for solar powered
vehicles across the continent of Australia from the northern
shore to the southern shore, a distance
of
some 3000 km.
This race was first held in Novem ber 1987, and was repeated
in
1990, 1993 and again in 199 6. Universities provide a
suostantial number of the entrants, however participation by
the research arms of the automotive industry has increased
significantly since the first race was won by the General
Motors Sunraycer [23]. The race is proving to be an
important test bed for developing
EV
technology, and is
attracting increasing attention for this aspect [24],
[ 2 5 ] .
The
1996 race had 48 starters including the vehicle shown in Fig.
1
11
PERMANENT MAGNET
DRIVE
YSTEMS
In
traditional brushed dc machines the required speed
extension, or operation in constant horsepower region, has
been achieved by direct control of the field. Flux weakening
is also applied in typical induction motor variable speed
drives operating above rated speed.
Control of the flux in a permanent magnet machine is
possible in machines designed with large armature reaction
effects. Much research has gone into the interior permanent
magnet machine in an attempt to address this issue, however
the large circulating currents involved significantly degrade
the efficiency [141, [151, [161. In the most efficient format for
BDCMs, using surface permanent magnets, and given the
magnetic properties of the Neodymium Iron Boron magnet
material commonly used, armature reaction effects are
minimal, and controlling the flux by electrical means is very
difficult.
A
Benefits
o
Axial Flux Geometry
Axial flux geometry, where in its simplest form the
machine is made from
two
opposing disks, one fixed and one
rotating, has two substantial advantages over the more
common radial flux geometry, where a drum rotates inside a
cylinder. [ l l] , [12], [17], [19] [26], [27].
Firstly there are significant volume savings over the more
usual radial flux geometry, for which much of the internal
volume of the rotor does not contribute to power output. This
volumetric efficiency, as well as details of design trade-offs
between the two geometries is addressed by Millner [l 11.
Secondly and more importantly a very simple technique
for flux weakening relying on mechanical adjustment of the
air-gap, which does not impinge significantly
on
the
efficiency, becomes possible. Within a surprisingly broad
band, increasing the airgap increases the copper loss as the
torque constant decreases, but decreases the iron
loss
as the
392
Authorized licensed use limited to: KING SAUD UNIVERSITY. Downloaded on October 27, 2009 at 17:40 from IEEE Xplore. Restrictions apply.
-
8/10/2019 High Efficiency Permanent Magnet Drive Systems for Electric Vehicles
3/6
flux density reducLs, keeping the overall efficiency relatively
constant.
Axial flux ma chines can have a stator disk with rotor disks
either side, [26], [171, a single rotor sandwiched between two
stator disks, [111 or simply a single sided arrangement with
one stationary and one rotating disk, as discussed here.
Whilst it is tempting to use the intemal stator version,
particularly in an ironless configuration, the thermal
management adva ntage of an iron stator in broadlheavy duty
traction applications is not insignificant.
Similarly the single rotor double sided machine appears
very attractive, however its construction is rather more
difficult and the ability to adjust the airgap is made
considerably more complicated. There is
a
strong attractive
force between the disks in the single sided version, but it is
not unmanageable with a dedicated thrust bearing or deep
groove ball bearings. The work reported in this paper is on
single sided axial flux machines, although some of the results
would have more general applicability. It should be noted
that not all axial flux machine applications are for in
-
wheel
drives, where the added unsprung weight can provide a
substantial mechanical design challenge.
B.
The Specific Machine Developed
This motor used in the race
in
1993 is shown
in
Fig 3and
has been reported earlier.
The motor for the 1996 race involved several
improvements,
so
that system efficiencies have risen from
about 91% at rated conditions to over 94%.[28]. These
machines can be readily dismantled and reassembled with a
range of sp acers on the shaft, providing different air gaps, for
expected race condition s, Production versions of this
machine were used by 6 other competitors in the 1996 race in
Australia, and 19 out of 36 competitors used the traction
system in the USA Sunra yce in June of 1997.
Construction wc.:;
is
currently progressing at Northem
Territory University on a prototype system providing such
adjustment without the need for dismantling,
so
that
adjustment can be ma de during operation.
Genesis the Sunrayce 97 entry from Messiah College,
Grantham, Pennsylvania featured a production motor with an
adde d fully automated servo driven gap variation system, put
to good effect during the race to fine tune the efficiency of
the motor, under operating conditions.
C. Managing the Loss Mechanisms
Whilst much of the control of the loss mechanisms in axial
flux machines follow relatively standard procedures, there
are two aspects of the machines discussed here that are
worthy of mention, flux distribution within an axial flux
machine of this particular type, and cogging torque in
machines with iron stators.
I
Flux distribution: The accurate solution of flux
distribution in axial flux machines is complicated by
two
issues, firstly lines of flux do not remain in a single plane as
they do in radial flux machines, typically travelling on
~
393
Fig
3 .
An
early version
of
the
motor,
disassembled
cylindrical surfaces across the airgap, and radially in t
circuit before returning across the air gap. Two dimension
finite element analysis gives reasonable approximation
when sections of such cylinders are flattened out.
Secondly the sides of slots are parallel, and therefore n
radial, so that less iron area is available for flux at the inn
radius of the toroid. Accurate analysis, and the imperatives
section I.
C.
above highlighting the importance of lo
control, indicate that three dimensional finite eleme
analysis
is
essential for complete understanding of fl
distribution., and machine optimisation.
2
Cogging
torque: Cogging torque, indicated by t
tendency of the rotor to index, or align with the slot pattern
invariably present in permanent magnet machines, and
very strong in concentrated winding situations as in th
machine, where the slot number of
36
is a simple multiple
the pole number of
12.
The first versions of this machine, with
a
normal runni
torque at
1 kW,
72 kph of
15
Nm , exhibited a cogging torq
of 10 Nm. Whilst this is in itself not a loss mechanism, sin
energy stored in the magnetic spring is returned, and giv
the inertia of the vehicle such cogging is never noticed
operation, it is nevertheless a very interesting diagnostic.
The existence of preferred rotor positions is an indicati
that at those positions, the magnetic circuit reluctance
lowest, and therefore the flux density will be at its highest.
there is a cogging torque then movement away from t
preferred position must imply increasing reluctance and th
decreasing flux density, implying a flux ripple at the s
frequency. Whilst in normal operation, the main flux patte
has a frequency of close to 60
z
the slot induced ripple w
be at 180
Hz,
and thus can contribute significantly to ir
loss,
not only in the stator, but also in the rotor.
Cogging torque is a well known phenomenon, however t
usual techniques to control it such as skewing the magne
simply reduce the cogging torque at any angle by averag
it across the skew angle [29]. Whilst this can be effective
reducing torque ripple, it does not remove the flux ripple
the slot frequency, and the associated
loss
The torque simp
occurs at different times in different places to give a n
average cogging torque o f zero.
Authorized licensed use limited to: KING SAUD UNIVERSITY. Downloaded on October 27, 2009 at 17:40 from IEEE Xplore. Restrictions apply.
-
8/10/2019 High Efficiency Permanent Magnet Drive Systems for Electric Vehicles
4/6
For a typical six step controller, the minimum magnet pole
width is 120 electrical degrees, leaving
60
electrical degrees
between poles. However machines constructed with this
minimum magnet width will usually exhibit very hig,h
cogging torque.
Widening the m agnet w ill significantly impac t on this. Thle
principle has been reported for radial
f l u x
machines, wifh
general solutions given for some formats [30]. Individual
researchers have reported adjustment
of
magnet cross section
as well as width to minimise cogging torque [181.
The results of the optimisation process for an axial flux
machine designed for application in direct driving the rear
wheel of a bicycle are shown below in fig.
4.
This machine stator has an outer diameter of 160 mm and
an inside diameter of
100
mm. The machine has been
designed with 16 poles, one slot per pole per phase, thus at
the inner radius the slot pitch is 6.5 mm, and the minimum
magnet width is thus 13 mm. The plots show the force on a
magnet (and hence
on
a rotor) as the magnet is displaced
from its central position (centred over one slot) to a position
of one half a slot pitch. The parameter is the magnet width
as
it is gradually increased from the minimum. The reduction in
cogging torque is clear, as is the return of cogging torque
as
the width is increased past the minimum. Thus the flux ripple
can be reduced, and hence iron loss reduced although the
resultant at the minimum cogging torque, optimising only
magnet width, still results is some higher order
flux
ripple.
It should also be noted that the back emf waveform for the
windings is not unaffected by the magnet width adjustment,
and good design will include analysis of the impact on back
emf waveform, since this will impact on controller
efficiency, and the average torque constant of the motor
[3 11.
I11
THE POWER LECTRONICONTROLLER
The requirements for vehicular drives are very different
from those often considered under the topic of advanced
drives. Whilst accurate control
of
average torque is essential,
accurate control of the instantaneous torque
is
not, neither is
torque control response in very short times, because of the
inertia of the vehicle, and power limitations in the prime
mover.
The dominant requirement is that of maximising
efficiency. This is true not only for the racing vehicle but for
200
Min O5mm
2
. m f Min l Omm
A Min l 5mm
* Min 2Omm
2
.
100
.
X
x m
:
-200
x
Min 2 5m m
Displacement
mm
Fig. 4 Cogging force vs tangential displacement of magnet from central
position, with magnet width as the parameter.
~
394
EVs
in general as discussed in section
I.
C., not because of
the cost of energy, but because of the cost of carrying the
energy in battery systems. Further, managing the heat load
from an inefficient controller can add significantly to the
required infrastructure.
Earlier work on such controllers has highlighted many of
the issues, including the difficulty of measuring very high
efficiencies. This has resulted
in
the development of a very
simple, accurate calorimetric technique. This entails
enclosing the complete controller in a thermally well
insulated container with all connections made, injecting
controlled amounts of heat via
a
load resistor mounted on the
controller heat sink, thus calibrating the enclosure
temperature above ambient against power injected. A small
fan inside the enclosure ensures evenness of temperature at
all points inside the enclosure, so that the internal volum e can
be treated as a point source of heat. The m otor is then driven
on load by the controller, and the internal temperature of the
enclosure above ambient is measured. This work is reported
elsewhere [32]. For the first generation controller, hard
switched at 15
ItHz,
the controller losses at
1
kW, 72 kph
were
34.2 W.
This lead to the development of a second generation
controller discussed below.
A Switching
Loss
Control
At the present time, since it is possible by the techniques
described below to dramatically limit switching losses
without compromising operation
so
that conduction
loss is
dominant, soft switched inverters are not able to compete, at
least up to power levels of 10 0 kW.
Since reversing an EV
is
required only rarely, and then
under conditions of stopping, and conscious selection by the
driver, the motor control need only be two quadrant. This
implies that high levels of regenerative braking are not
available at low speeds. However since the energy of the
vehicle is proportional to the square of the velocity, little is
lost by using mechanical braking for determination of final
stopping position. Thus since only two phases are energised
at any one time by the controller, involving four switches,
one can be fully on one fully off, and only two switches act
under PWM control to regulate the current. The flyback
current is conducted through the opposite FET, driven to
conduct in reverse after a dead time, since the drop of an ON
FET
i n
the reverse direction is substantially lower than either
a body diode or a Schottky diode. A hysteresis band current
control scheme is used, with consequent very
low
switching
frequencies at both low and high speeds, the highest
switching frequency being at half speed. Very large current
ripples in such traction applications are not significant, and
the controller has a current ripple band of
10A
superimposed
on an average current which is 30A under typical operating
conditions. This results in a switching frequency which is
below 6 kHz at all times, and for the solar car operation,
when operating in a band
of
the top
15%
of speed, is never
Authorized licensed use limited to: KING SAUD UNIVERSITY. Downloaded on October 27, 2009 at 17:40 from IEEE Xplore. Restrictions apply.
-
8/10/2019 High Efficiency Permanent Magnet Drive Systems for Electric Vehicles
5/6
Hall Po
i
s
Power
Fig. 5 Block diagram
of
the high performance controller.
above a few hundred
Hz.
This controller is shown in Fig
5,
and whilst the calorimetric procedures h ave yet to be applied,
all indications are that the losses at
1
kW, at a speed range
from 75 km/h to
90
k m h the losses are less than
10
W, of
which
8.5
W are conduction
loss.
B. Body Diod e Reverse Recovery
A major source of
loss
in well designed,
low
inductance
layout, high current high switching speed hard switched
controllers results from the reverse recovery of the body
diode in the
MOSFET,
carrying current during flyback dead
times
[33].
Careful use of parallel Schottky diodes, enables carrying
of the majority of the current during the dead time by the
Schottky diode. Figs
6
and
7
show the reverse recovery
phenomenon in a constructed controller, with and without the
Schottky diodes.
C.
Layout Issues
Low inductance layout of high speed high current
switching is important not only to prevent overvoltage
conditions resulting from high diidt
s
in the circuit, but also
to allow the curr ent to comm utate as rapidly as possible from
one switch to another, minimising switching loss [34].
D. General E
V
work
For general
EV
work,
at
power ranges from
10 k W to 100
kW,
and where the vehicle is likely to spend a large amount
of
time at a speed well below maximum speed, the benefits
of
soft
switching, in terms of device stress, machine stress,
and RFIIEMI co ntrol are very attractive. Much work is being
directed to this important area
[ 3 5 ] .
IV FURTHER
WORK
Laboratory design work is currently being carried out on a
version of the controller with
a
boost converter on the DC
bus to provide occasional performance above a rated
(Battery voltage limited) speed. This is a second approach,
Fig
6
Measured reverse current in the
lower
FET body diode, carryin
forward current of 10 A as the upper FET is switched on.
Fig 7 Repeat of Fig 6with paralleled Schottky diodes
in
place
being studied in parallel with the mechanical adjustment
the air gap in the axial flux machine. Two versions are und
analysis, the first using a hard switched boost converter fo
Southeast Asian city street application, and a resonant li
version for high performance vehicles [36].
V CONCLUSIONS
The pressures
/
requirements
for
maximising efficiency
EVs
are substantial, and it is believed that the benefits of t
permanent m agnet machine, particularly in its volumetrica
efficient axial flux form are significant. It is proposed that t
perceived limitation, that
of
not easily yielding to consta
horsepower operation, can be readily surmounted. In fact tw
solutions, that of using the mechanical gap variation in t
motor, and that of the use of bus boosting, are simply a
effectively achievable. These could well be used in conce
The use of gap variation is also important in optimising t
machines efficiency under operational conditions.
395
Authorized licensed use limited to: KING SAUD UNIVERSITY. Downloaded on October 27, 2009 at 17:40 from IEEE Xplore. Restrictions apply.
-
8/10/2019 High Efficiency Permanent Magnet Drive Systems for Electric Vehicles
6/6
VI ACKNOWLEDGMENTS
[IS] M Terashima, T Ashikaga, T Mizuno, K Natori, N. Fujiwara, and M.
Yada, Novel Motors and Controllers for High-Performance Electric
Vehicle with Four In-Wheel M otors, fEE E tran s Indu stria l
The author would like to acknowledge the value of the
substantial interaction with New Generation Motors
Corporation covering many discussions, ideas, arid
Clectronics, Vol44 no I , Feb
1997,
pp 28 - 38
improvements The author
is
indebted
o
Chris oKeefe,
who
[191 D
J
Patterson, Recent Advances I n the Design and Construction of
Axial Flux Permanent Magnet Machines. Proceedings, IEAust
roduced the data shown in fig. 4.
VI1 REFERENCES Summit, Darwin 1996, pp 43 5- 440.
V Wouk, Hybrids: then and n ow,lEEE Spectrum,
Vol
32, No 7, July
B Bates. On the road with a Ford HEV, IEE E Spectrum, Vol 32, No
R D King, K B Haefner, L Salasoo, and R A Koegl, Transit bus tak.es
the hybrid route, fE EE Spectrum, Vol 32, No 7, July 1995, pp 26
-
31.
A B Lovins, M M Brylawski, D R Cramer, and T C Moore,
HYPERCARS: Materials, Manufacturing, and Policy Implications a
proprietary study by the Hypercar Centre, Rocky Mountain Institute,
March 1996
D F Gosden Generation of CO, resulting from the use of elect.ric
vehicles compared with gasoline fuelled vehicles in Australia IEAuljt.,
vol GE 15, No I pp 83 - 90, Aug 1991.
Workbook for Transport (mobile sources), workbook 3.1 revision
I
1996, from The Australian Methodology for the Estimation of
Greenhouse Gas Emissions and Sinks, published by the Natioiiial
Greenhouse Gas Inventory Committee. ISBN 0 642 24833 8
Rajashekara,
K;
Martin, R: Present and Future Trends for Electric
Vehicles - Review of Electric Propulsion Systems, IEEE Workshop on
Power Electronics in Transportation, pp 7-12, 1992.
Booz, Allen and Hamilton, Inc., Assessment of US Electric Vehicle
Programs with AC Powertrains, EPRl Report CU-6685, 1990.
R L Willis and J Brandes Ford Next Generation Electric Vehicle
Powertrain, i n proc. of 12 International Electric Vehicle
Symposium pp 449 - 58, Dec 1994.
B Asaii,
D
F Gosden and S Sathiakumar, A Simple High Eficiency
Induction Machine Torque Control IEEE PESC 95, 18 - 22 June
1995, Atlanta, pp 778 - 784.
A R Millner, Multi-Hundred Horsepower Permanent Magnet
Brushless Disc Motors.
i n
Record of the 9th Annual IEEE Applied
Power Electronics Con ference and Exposition, APEC94, pp 35 1-355.
F Caricchi, F C r e s c i m h , , . A Di Napoli, M Marcheggiani, Prototype
of Electric Vehicle Drive with Twin Water Cooled Wheel Direct Drive
Motors in the record of the IEEEPESC96,23-27 June 1996,Baverio,
Italy, pp 1926
-
1932.
G H Chen and K J Tseng Design of a Permanent Magnet Direct-
driven Wheel Motor Drive for Electric Vehicle, in the record of ithe
IEEE PESC96,23-27 June 199 6, Baveno, Italy, pp 1933 - 1939
B
K
Bose and P M Szczesny. A Microcomputer-Based Control and
Simulation of an Advanced IPM Synchronous Machine Drive System
for Electric Vehicle Propulsion. IEEE Trans Ind Electronics, Vol .35,
No
4
November 1988. p547.
J
M Kim, and S K SUI, Speed control of Interior Permanent M agnet
Synchronous M otor Drive for the Flux Weakening Operation, IElEE
Transactions on Industry Applications, Vol 3 3 No
I
January/February
B K Bose A High Performance Inverter-Fed Drive System of an
Interior Permanent Magnet Synchronous Machine, IEEE Transactions
on Industry Applications, Vol 24, No 6, Novem bedDecem ber 1988,
p987.
F. Caricchi, F. Crescimbini, G. Noia and D. Pirolo, Experimental
Study of a Bidirectional DC-DC Converter for the DC Link Voltage
Control and the Regenerative Braking in PM Motor Drives Devoted to
Electrical Vehicles, IEEE Applied Power Electronics Conference,pp.
1 9 9 . 5 , ~ ~6 - 2 1 .
7, July 1995. pp 22 - 25.
1997, pp 43 48.
381-386, 1994.
[2 ] D. J .
Patterson and R Spte The Design, and Development of an Axial
Flux Permanent Magnet Brushless DC Motor for Wheel Drive in a
Solar Powered Vehic1efEEE Trans. on Industry Applications, Vol 3
1
No. 5 September/October 1995, pp 1054 -1061.
1211 M. Ehsani, K. M. Rahman, and H. A. Toliyat, Propulsion System
Design of Electric and Hybrid Vehicles, fEEE trans. fndusrriul
Electronics, V ol4 4 no I Feb. 1997, pp 19
-
27.
[22] J G Kassakian, H Wolf, J M Miller, and C J Hurton, Automotive
electrical systems circa 2005, fEE E Spectrum, Vol 3 3, No 8, Aug ust
[231 Lectures from GM Sunraycer Case History Aerovironment Inc, 825
Myrtle Avenue, MONROVIA CA 91016, Nov 8, 1989.ISBN 1-56091-
[24]
C R
Kyle
.Racing with the Sun - The 1990 World Solar Challenge
Society of Automotive Engineers Inc, 1991, ISBN 1-56091-161-1
[25] D M Roche, A
E
T Schinckel, J W V Storey, C P Humphris, M R
Guelden, Speed of light
:
The 1996 World Solar Challenge, The
Photovoltaics Special Research Centre, University of New South
Wales, Sydney, ISBN 0 7334 1527
X.
[26] C. Jensen, F. Profumo and T. Lipo, A Low Loss Permanent Magnet
Brushless DC Motor Utilizing Tape Wound Amorphous Iron, IEEE
IAS Annual Meeting Conf. Rec., pp. 281-286, 1990.
[27] F. Profumo, Z Zhang, and A. Tenconi, Axial Flux Machines Drives: A
New Viable Solution for Electric Cars, fEEE trans. Industrial
Electronics, V ol 44 no I Feb. 1997. pp 39
-
45.
[28] D J Patterson Drive Systems for Solar Vehicles Proceedings, 1996
World Electric and Solar Vehicle Conference, Adelaide, November
1996. Invited paper.
[29] R P Deodhar. D A Stanton.
T
M Jahns, T J E Miller, Prediction of
Cogging Torque Using the Flux-MMF Diagram Technique
Proceedings, IEEE IAS95, Orlando, Florida, October 1995, pp. 693 -
700.
[30] Li. and G Slemon,.Reduction of Cogging Torque in Permanent
Magnet Motors fEEE Transactions on Magnetics, Vol 24, No 6, NOV
[31] A M Tuckey, D J Patterson and J Swenson, A Kinetic Energy Tidal
Generator in the Northern Territory - Results Proccedings IECON
97, New Orleans, November, 1997
1321 D J Patterson An efficiency Optimized controller for a Brushless DC
Machine. and loss measurement using a simple calorimetric
technique. Record of the 26th Annual IEEE Power Electronics
Specialist Conference, PESC95, Atlanta. June 1995. pp 22-27.
[33] M
I
Castro Simas and J C Freire CAD Tools to Optimize Power
MOSFET Performance Using Channel Reverse Conduction f E E E
Truns. on Power Electrontcs, Vol 9, No. 5 September 1994, pp 522 -
531.
[34]
D
Prusia, Laminated Bus Bars for Power System Interconnects
Record of the 12 Annual Applied Power Electronics Co nference an d
Exposition, APEC97, Atlanta pp585
-
589.
[35] J.
-S.
Lai,.Resonant Snubber-Based Soft-Switching Inverters for
Electric
Propulsion
Drives,
IEEE Iruns Industrial Electronics V d 44
no I Feb. 1 997, pp 71
-
80
[36] A
W
Tuckey and D J Patterson, Integrating a Resonant dc Link
Converter and a Boost Converter to allow Overspeed Operation of a
Brushless dc Machine, Proceedings, AUPEC 97, Sydney, Australia,
October 1997.
1996, pp 22
-
27.
013-5.
1988, pp 2901-2903 .
396


















