Hide-n-seek Robot Ivan See & Karen Tsang Presentation Date: 9/18/03.
20
Hide-n-seek Robot Ivan See & Karen Tsang Presentation Date: 9/18/03
-
date post
22-Dec-2015 -
Category
Documents
-
view
218 -
download
4
Transcript of Hide-n-seek Robot Ivan See & Karen Tsang Presentation Date: 9/18/03.
Hide-n-seek Robot
Ivan See & Karen Tsang
Presentation Date: 9/18/03

Objectives
A robot that recognize and search for tangible objects and carries the correct object back to the original location
Involves servomotor control, DC motor control, image processing, PDA programming, and ultrasonic sensor utilization
Overview
1. User shows targeted object in front of the robot’s camera
2. Robot takes a picture of the object and stores it in its memory
3. User hides the object within ultrasonic-reachable area and press the “Go” button on the robot

Overview (cont.)
4. Robot starts searching for the object by using its ultrasonic sensor
5. Robot approaches sensed object and recognize if it’s the correct object by using its camera
6. Robot grabs on the object and brings it back to the start position
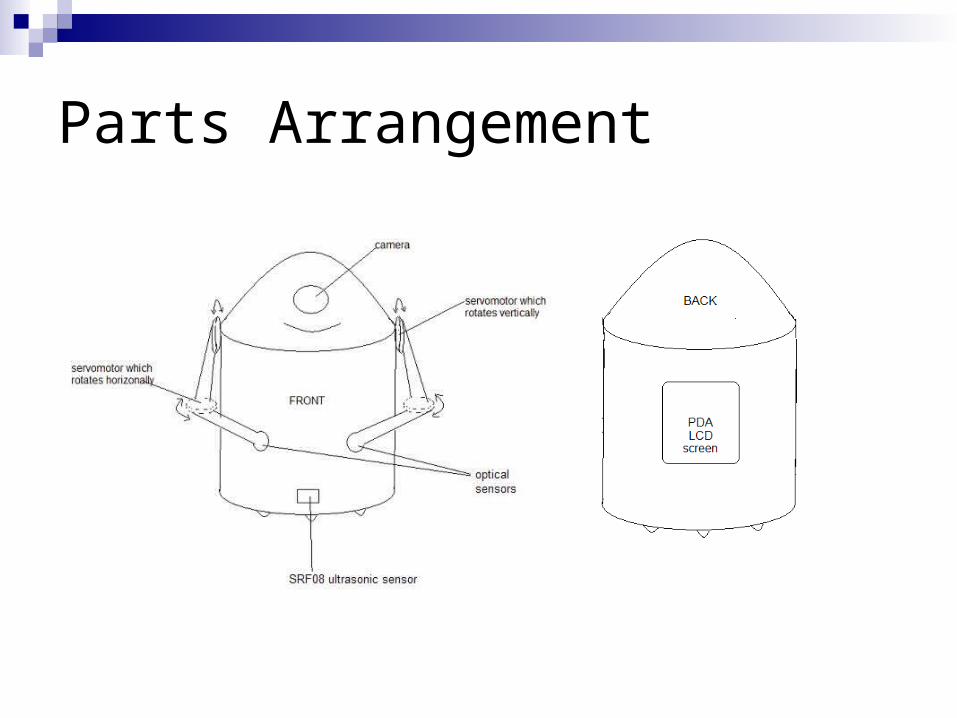
Parts Arrangement

Block Diagram
User Interface
User interacts with the Palm which will be mounted at the back of the robot
“OK” button will be shown on the screen of the Palm for starting the initial photo taking procedure
“Go” button will be shown on the screen for starting the searching procedure
“Reset” button will be shown on the screen for restarting all the procedures
Specification
1.5m radius ultrasonic effective area 320 x 240 image processing resolution Travels approximately 1ft/sec Hold targeted object in arms up to 0.5lb Final returning position error < 1ft2

Specification
Only objects in symmetrical shapes will be used Only floor in plain color will be used for testing to
avoid image background confusion (No patterns are allowed on the carpet)
Sufficient light source to avoid too much shadow area appear under the target object
No obstacles allowed in operating area

Ultrasonic Range Finder SRF08
Voltage 5V only
Current 15 mA typical,
3 mA standby
Frequency 40 KHz
Range 3 cm (~1") to 6 m (~20 ft.)
Timing Fully time echo, freeing host controller of task
Echo Multiple echo for velocity determination
Connection Standard IIC bus
Units Range reported in uS, mm, or inches
By Devantech
Uses sonar to detect objects
Detects up to 16 returning echoes
Built-in light sensor

Object Location Algorithm
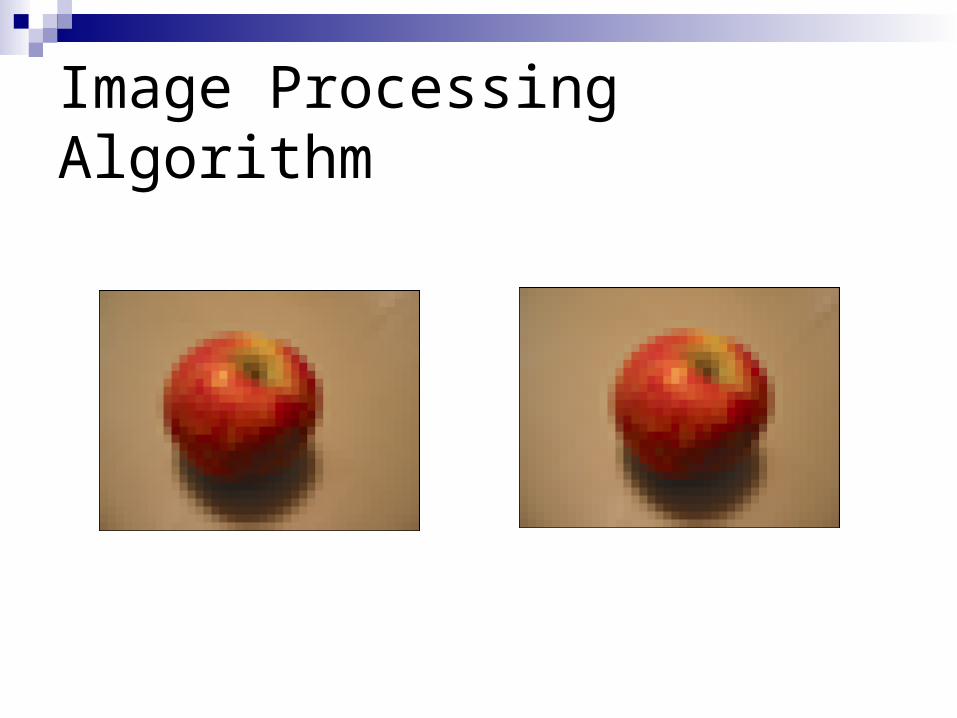
Image Processing Algorithm

Image Processing Algorithm
Compare pixels one by one Pixel is valid if color value is within
tolerance ranges Validity of an entire image is considered
by a certain percentage of valid pixels

The foot
DC Motor Module from the “Rumble Robots Invasion”
Motor A drives two wheels on the right, while Motor B drives two wheel on the left
Forward, backward, turn left or right
Make 0 degree radius turns Driven by SN754410 Motor
Controller IC from Texas Instruments
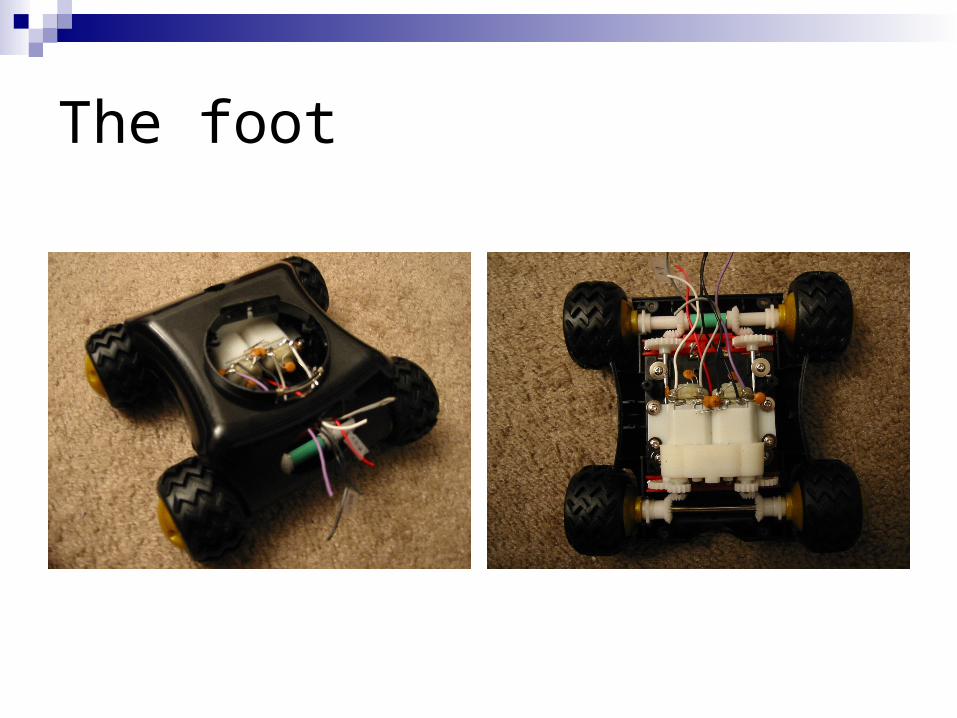
The foot

Test Plan
Targeted objects such as apple, orange, and lemon will be used to check if the robot will be able to distinguish between objects in different color
Accurately locate itself in front of the targeted object after searching
Make sure target object is hold in arms while moving
Return to original position with in 1ft2 error

Work Completed
Acquired all hardware components Downloaded Palm emulation software for Palm
software development Acquired reference books for programming Palm
in C Dissembled and investigated “Rumble Robots
Invasion” from Toys R Us Acquired DC Motor wheel module from “Rumble
Robots Invasion”
Work to be done
Assemble arms with servos and optical sensor (Ivan/Karen)
Build DC motor controller circuit with motor controller chip and PAL chip (Ivan)
Install Palm and HC12 on plexiglass rack on the robot (Ivan/Karen)
Investigate SRF08 ultrasonic sensor and its IIC interface (Karen)
HC12 code write up (Karen) Palm code write up (Ivan) Investigate SD camera interface with Palm (Ivan)

System Cost
Palm m130 $130
SRF08 Ultrasonic sensor $55
Motorola HC12 $160 (provided)
Servomotors x 4 $60 (provided)
Motor controller IC SN754410 $5
Palm serial cable $15
Veo SD Camera for Palm $60
Rumble Robots Invasion $15
Plexiglass for base $2
Aluminum Bar for arms $3
Screws and other mountings $2
Optical Sensor x 2 $5 (from IDE class)
Batteries AA X 4 $3
Total $290
Questions?Comments?
Suggestions?