Hard (Real-)Time · Hard, rm and soft are subjective generalizations Most systems have multiple...
21
1 of 21 Hard Time Linux Hard Time Making Linux do Hard (Real-)Time
Transcript of Hard (Real-)Time · Hard, rm and soft are subjective generalizations Most systems have multiple...

1 of 21Hard Time Linux
Hard TimeMaking Linux do Hard (Real-)Time

2 of 21Hard Time Linux
MBARIThe Monterey Bay Aquarium Research Institute is aNon-Profit Research Center Founded in 1987 by Packard FoundationFurthering marine research through the peer efforts of scientists and engineers220 Employees (1/3 Science, 1/3 Engineering, 1/3 Administration) approx. $40 M/yr annual operating budgetLocated in Moss Landing, CaliforniaOperates 2 full-time research ships plus numerous ROVs and AUVsIncluding the swath vessel “Western Flyer” for longer missions further afield

3 of 21Hard Time Linux
Monterey Bay Submarine CanyonExtends 95 miles from Moss Landing, CaliforniaMaximum Depth is 3600 meters, reachable by day boats.Canyon Sides are > 1600 meters -- deeper than the Grand CanyonMuch is classified as a National Marine SanctuaryNew species are discovered on a regular basis
Vampyroteuthis infernalis

4 of 21Hard Time Linux
Simulated Time
Deus ex Machina
Simulated Time systems calculate time like any other quantity.
They incorporate model virtual worlds.
Program LogicVirtual World
Useful for predicting the future or explaining the past... but not much use for influencing the present!

5 of 21Hard Time Linux
Real-TimeAny system that interacts with the real, physical world
Systems that interact with the real world must synchronize with it.
Time is an external input
Program Logic

6 of 21Hard Time Linux
Deadlines
Real-Time deadlines can be hard: where missed deadline means system failure characteristic of interactions with physical world firm: occasional missed deadlines are tolerable characteristic of interactions with other computers soft: preceived "quality" of system degrades as deadlines are missed characteristic of interactions with humans
Hard, firm and soft are subjective generalizationsMost systems have multiple deadline types, each with unique qualities.
A system is denoted as hard, firm or soft Real-Time depending on its most challenging deadlines.
"Hard-realtime" systems may have firm and/or soft deadlines as well

7 of 21Hard Time Linux
Epiphany
Computers are fast relative to most real-time constraintsEmbeddeded Linux is everywhere! It is inexpensive, robust, easy to program, hosting a huge number of languages and libraries
Use Linux and dedicate sufficient computing resources to ensure hard real-time deadlines are always met.

8 of 21Hard Time Linux
Throughput vs. Determinism
Linux CPUs typically utilize large, multi-layer memory cachesOptimized for throughput rather than determinismCaches make CPUs run like a hare but, in real-time systems, the tortoise wins!
CPU memory caching prevents Hard Real-Time processes from safely utilizing more than a small fraction of the available time.
t0 t1 t2 t3
Real-Time Processin fast CPU cache
Real-Time Processin fast CPU cache
nonR/Ttask
Real-Time Processbumped from CPU cache...
Missed Deadline
One generally cannot lock real-time processes into CPU cachesSometimes, one can reserve a core exclusively for R/T processes
Non-Real Time"Distraction"

9 of 21Hard Time Linux
Trouble in Kernel Space
Linux was designed to be open, flexible, fair, and fast. It was never intended to meet hard timing deadlines.
Long running Linux kernel operations could not be interrupted.Device Drivers would occasionally disable interrupts for many milliseconds.
These issues were scattered throughout the kernel sources!
Until recently...

10 of 21Hard Time Linux
Does PREEMPT_RT Spell Redeemtion?
The PREEMPT_RT patch dramatically reduces the kernel's max. latency --> a truely amazing feat of software engineering!!
But, the RT patch is still not in the kernel mainline, because: It lowers aggregate throughput
Some low-end platforms lack the hardware support to implement RT well.
Device drivers have been steadily improved
Linux OS &Laundry Soap
Reformulated
with
PREEMPT_RT
for Real-Time

11 of 21Hard Time Linux
Trouble in User Space
Modern, popular programming environments and languages Often sacrifice determinism for ease of use May "automagically" invoke time-consuming algorithms.
Software Libraries are black boxes by design APIs specify inputs and outputs, but rarely compute time.
Applications with challenging hard timing deadlines are often forced to utilize low-level programming and to reimplement existing libraries.
PREEMPT_RT does not address User Space latency.
Even carefully written User Space code, running at "Real-Time" priority,my find itself contending with other user space processes forcommonly accessed resources.

12 of 21Hard Time Linux
Biological Inspiration
Our cerebral cortex shares many qualities of a typical Linux computer It is very complex, flexible, and, sometimes, even fair.Humans are blissfully unaware of firing of individual muscles for walking, talking, eating, digestion, etc.Routine activities are controlled by our peripheral nervous system.Our cerebrum focuses on analyzing and responding to unusual stimuli at a high level.Our cerebellum, or "little brain", coordinates stimulation with motion It is our center for real-time control and perception
Interestingly, humans can function without their cerebellum, but:
the resulting quality of life is significantly compromisedwith clumsiness, ...,slowing of various cognitive perceptual processes, and impaired fine motor and ocular-motor coordination.
http://jcn.sagepub.com/content/17/1/1.abstract

13 of 21Hard Time Linux
Partition the Problem
Identify what event-response loops have the most demanding deadlines
Factor only these critical loops into a separate, streamlined executable(s)
This is your real-time application's "Cerebellum" Insulate your main application logic from timing constraints! Implement it in a system programming language (like 'C' or C++) Minimize use of 3rd-party libraries
Connect to the non-time critical parts application parts via queues, Real-time parts must block, waiting to communicate results
Now you are are ready to...

14 of 21Hard Time Linux
Distribute Control (Virtually)
Run your real-time event response loops on reserved computing resources Initally, try using virtual computing resources
Linux processes with Real-Time priority Most convenient option But it is not very effective without an RT-patched kernel If you can, dedicate a core to RT processes! Use shared memory to communicate with main app Complete access to Linux kernel and user space But you risk priority inversion
Real-time tasks running with Linux in a hypervisor environment Less convenient Works quite well even without an RT-patched kernel Hypervisor specific IPC mechanisms for comms with main app No easy access to Linux kernel and user space No danger of priority inversion Still vulnerable to trashing CPU caches
http://wiki.ok-labs.com/

15 of 21Hard Time Linux
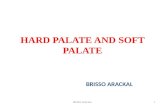
Distribute Control (Physically)Dedicate microcontrollers to your critical event-response loops
The least "convenient" option, but offering: No need for a RT-patched Linux kernel Much more deterministic response times No possibility of thrashing CPU caches Fewer resource contention issues Much lower power consumption Ability to safely limp or shutdown if host computer crashesBut, you must program on "the bare metal" or small Real-Time OS
Spindle Head
Actuator Arm
Actuator Axis
Actuator
IDE Connector
Jumper Block
Power Connector
Platter
Linux Inside!I don't think so
Dedicated DSP(s)

16 of 21Hard Time Linux
Microcontrollers Close the LoopMicrocontrollers are cheap and many use the GNU Compiler Collection Support for remote target debugging
Disadvantages: Custom hardware design Generally, a lot slower than most x86 systems No shared memory with Linux host possible Must use some form of physical networking
http://hackaday.com/2012/11/15/in-depth-comparison-at-stm32-f3-and-f4-discovery-boards/
$15 USD/each
Caches
256kB Flash48kB Fast Static RAM72 MIPSAnalog I/OHigh Resolution TimersEclipse Based IDE
For Example:

17 of 21Hard Time Linux
Smart I/O
If you need specialized I/O... You can likely find a microcontroller that already incorporates it. Many USB I/O extenders are just such microcontrollers Programmed to provide bit-level access to their built-in peripherals But, with custom programming, they can do much more!

18 of 21Hard Time Linux
Environmental Sample ProcessorA (very complicated) Water Sampler
Filters 1 to 4 liters of waterRuptures cells it collectsExtracts DNA and RNAIdentifies SpeciesDetects Algal ToxinsRadios results in hours
A robotic,molecular biology "Lab in a Can"

19 of 21Hard Time Linux
Distributed Control Case StudyTen year old hardware design, ARM9 @200Mhz, ~90 BogomipsLinux 2.4 kernel (no RT patch, Big Kernel Lock, IDE disables interrupts)Host application written almost entirely Ruby 1.8 scripting language!!
TI MSP430 microcontrollers networked to the Linux host via I2C control heaters and a dozen or so servo motors updated at 64hz.

20 of 21Hard Time Linux
Control System Electronics
ElectromechanicalControl Loops
Logic & Comms
Linux

21 of 21Hard Time Linux
Real-Time Rx
Partition your problem into Real-Time and non Real-Time tasks
Decouple different time domains (with queues)
Dedicate computing resources to Real-Time tasks
Consider dedicated CPUs optimized for deterministic response
Linux will sometimes be only part of the solution