
Sims and Zha 1999 Error Bands for Impulse Responses (Vietnam)

MONITORING AN INTERSECTION USINGA NETWORK OF LASER SCANNERS
H. Zhao, J. Cui, H. Zha,Peking University
K. Katabira, X. Shao, R. Shibasaki,University of Tokyo

Background (1)
Analyzing and Monitoring the traffic behavior in an intersection
Efficiently and accurately COLLECTING the TRAFFICDATA in an INTERSECTION
Real-timely DETECTINGDANGEOUS SITUATIONS.

Background (2)• Vision-based methods suffer mainly on the
following difficulties– Occlusion– Computation Cost– Illumination Change
1. Restrict camera’s setting condition
e.g. the camera is required to be set on a tall position, monitoring intersection from the above
e.g. monitor vehicles of limited lanes, do not discriminate moving objects.
To solve the problems
2. Target on a simplified situation

ObjectiveThis research propose a novel system for monitoring and collecting detailed traffic data, with easy setting condition, in an environment of complicated traffic behavior, such as intersection, using a network of single-row laser scanner.

System ImageServer PC
#2
#1
Laser Scanner
Pedes.
#1
#2
Car
Car
Bicycle
Network
An image of integrated laser data
Laser Scanner
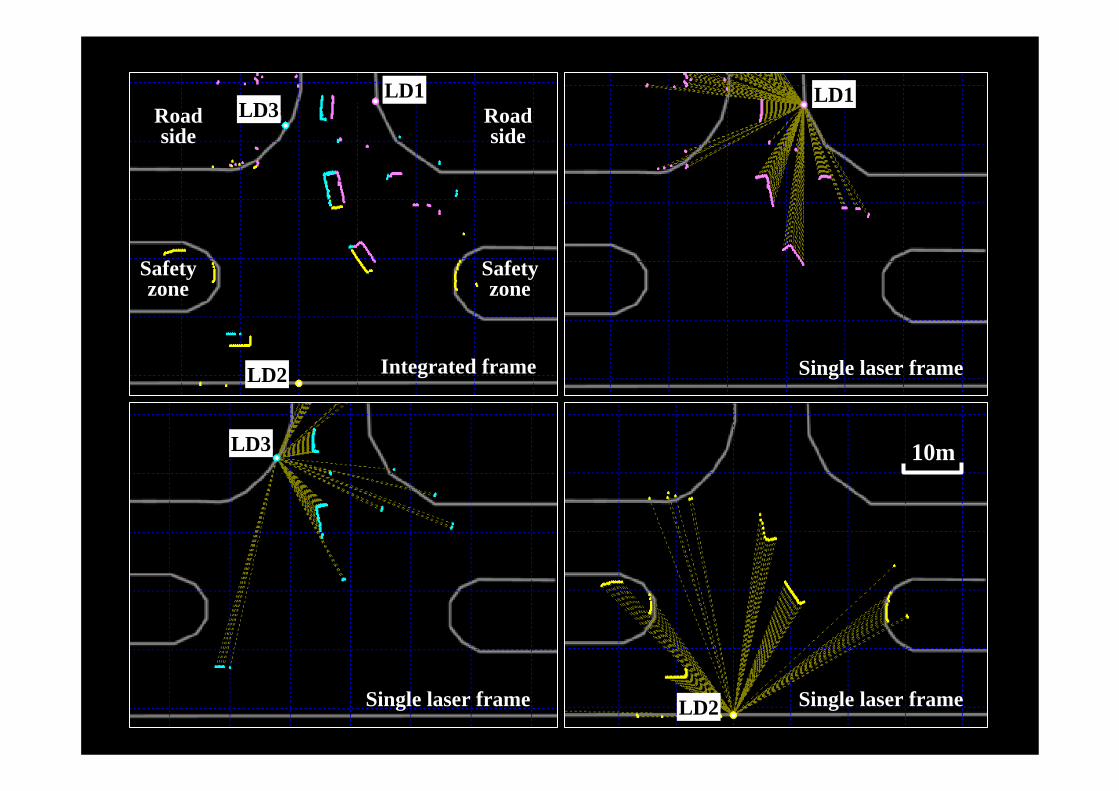
LD1LD3
LD2
LD2
LD3
LD1
Integrated frame Single laser frame
Single laser frameSingle laser frame
Safety zone
Safety zone
Road side
Road side
10m



Processing Flow
1. Data Integration
…
2. Detection
3. Tracking
4. Recognition
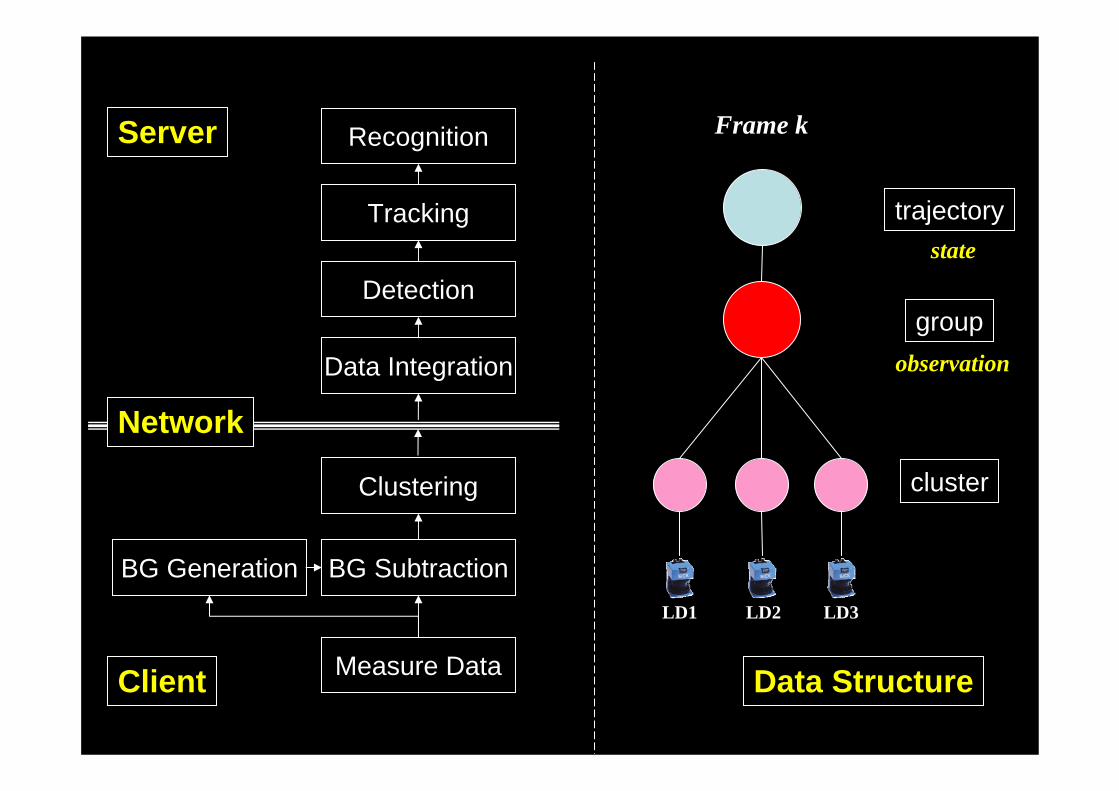
Server
Client
Network
Measure dataLaser Scanner1
BG Subtraction
Clustering
BG Generation
Measure dataLaser Scanner N
BG Subtraction
Clustering
BG Generation
Moving object

Processing ModulesServer
Data Integration
Detection
Tracking
Recognition
Moving object
Measure Data
BG SubtractionBG Generation
Clustering
Client Measure Data
BG SubtractionBG Generation
Clustering
…Laser Scanner 1 Laser Scanner N
Calibration, Synchronization
Network
Recognition
Tracking
Detection
Data Integration
Measure Data
BG SubtractionBG Generation
Clustering
Server
Client
Network
trajectory
Frame k
group
cluster
LD1 LD2 LD3
Data Structure
observation
state

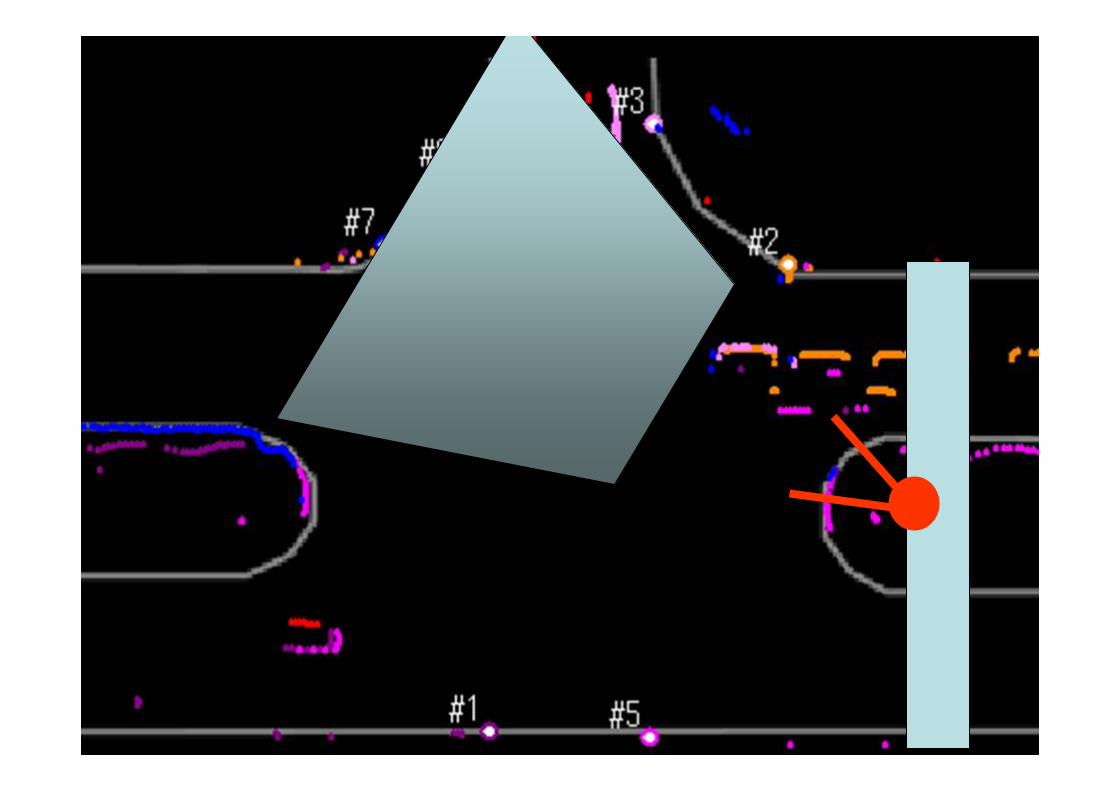
Difficulties

Difficulty 1

The data of the same object might be spatially disconnected

Difficulties

The data of different objects might be spatially close
There are different kinds of objects, complicated motions

Task 1
We are not able to rely only on distance, size, shape, location etc for detection and traction.
We need to find some other clues to associate the data of the same object together.

Data Feature
u1
u2e c
sA car

Data Feature
v1
v2
v3
v4
uu
u
uu
uu

Data Feature
u
uu
u
u
u

Object Model
(v3, sv3)
len1
len2p (v2, sv2)(v4, sv4)
(v1, sv1)
(c, val) u
u
(v1=dirv)
dirv

The previous frame
The current frame
More sensors bring more confusion in data association
Difficulty 2

Task 2Data association is difficult when facing a
complicated environment such as an intersection, where different kinds of objects, different motion patterns exist.
Also, a large number of distributed sensors will bring more difficulties in data association.
A data association algorithm is required to tackle the confusions.

A range streamSc
an a
ngle
(with
in a
lase
r sca
n)
Time (A stream of laser scans)
a moving object
a static object

A simple clustering resultSc
an a
ngle
(with
in a
lase
r sca
n)
Time (A stream of laser scans)

Data Association Method
trajectory
k-1 k
group
cluster
LD1 LD2 LD3 LD1 LD2 LD3 LD3
New trajectory
1
2
3

Peking Univ.
Peking Univ.
Sports Center
Overhead Bridge
Laser Scanner
Experiment
Video Camera

40cm
激光扫描仪


SummaryWe propose a novel system for monitoring and collecting detailed traffic data, with easy setting condition, in an environment of complicated traffic behavior, such as intersection, using a network of single-row laser scanners.
Future Topics
• Accuracy evaluation• Recognition module• Fusing laser scanner with video camera






![3DSimulationofaTransonicWingFlutterusingan E ......by Zha [9] is employed in this paper to make the aeroelastic calculation more e–cient. Same as the Roe scheme, the Zha E-CUSP2](https://static.fdocuments.us/doc/165x107/5e9a837aa3d31c5ee461816c/3dsimulationofatransonicwingflutterusingan-e-by-zha-9-is-employed-in-this.jpg)



![Une nouvelle approche pour indexer les documents ... · Récemment Srihari et al. dans [ZHA 03b] et dans [Zha 03a] ont réalisé l’importance de ce besoin et ont présenté un sys-tème](https://static.fdocuments.us/doc/165x107/5f9a50ff71325505ba462ac1/une-nouvelle-approche-pour-indexer-les-documents-rcemment-srihari-et-al-dans.jpg)







