H Bridge Overview

of 16
Transcript of H Bridge Overview
-
8/8/2019 H Bridge Overview
1/16
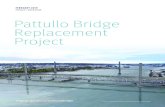
In general an H-bridge is a rather simple circuit, containing four switching element, with
the load at the center, in an H-like configuration:
The switching elements (Q1..Q4) are usually bi-polar or FET transistors, in some high-
voltage applications IGBTs. Integrated solutions also exist but whether the switching
elements are integrated with their control circuits or not is not relevant for the most part
fot this discussion. The diodes (D1..D4) are called catch diodes and are usually of aSchottky type. Though they are mentioned in most documents dealing with H-bridges,
their role is usually neglected. They are of key importance for most of the discussion on
this page.
In general all four switching elements can be turned on and off independently, though
there are some obvious restrictions. Though there's no theoretical restriction like that, by
far the most pervasive load used with H-bridges are brushed DC or bipolar steppermotors (steppers need two H-bridges per motor).
Basic operation
The basic operating mode of an H-bridge is fairly simple: if Q2 and Q3 are turned on, the
left lead of the motor will be connected to ground, while the right lead is connected to the
power supply. Current starts flowing through the motor which energizes the motor in(let's say) the forward direction and the motor shaft starts spinning. If Q1 and Q4 are
turned on, the converse will happen, the motor gets energized in the reverse direction,and the shaft will start spinning in that way. If less than full-speed (or torqe) operation is
intended one of the switches are controlled in a PWM fashion. The average voltage seen
by the motor will be determined by the ratio between the 'on' and 'off' time of the PWM
signal.
-
8/8/2019 H Bridge Overview
2/16
Current flow in the forward direction Current flow in the backward direction
Component selection
For the most part, the key decision to make for an H-bridge is the selection of the
switching elements. There are many factors to be considered, the most important ones are
the operating current, the operating voltage and the switching (PWM) frequency. For
most cases a MOSFET switching element is a good selection, so for the rest of the
document I will assume MOSFET switching elements.
MOSFETs, when operated as switches, have two states: on and off. In the 'on' state they
have more or less behave like a small resistor. Their resistance is called channel
resistance, and is denoted by rdson. Obviously the higher this value is, the higher the losses
are on the MOSFET. While efficiency is not a big concern for most H-bridge designs,heat is. Since the loss on the MOSFET is converted to heat that has to be dissipated, the
lower rdson is the better. Another factor to consider is that rdson is temperature-dependent
and increases with temperature. Datasheets usually brag about rdson at 25oC, but that
hardly can be considered as normal operating condition. So always look for rdson over the
full temperature range to make sure you're operating within safe limits.
A related decision to make is to decide if 'N'-channel or 'P'-channel MOSFETs are used.'N' channel MOSFETs have a much lower rdson values but they are hard to control on the
high-side (Q1 and Q3). In general the low-side switches are always 'N'-channel
transistors, while the high-side ones are sometime 'N' and sometime 'P' type. I will get
back to the control problems later, here it's sufficient to say that this decision hassignificant impact on the control circuit.
Once the type of the switches is decided, the part selection can be started. The operating
current and the available cooling will determine the maximum allowable rdson. As a
guideline, the bigger the package is, the more heat it can dissipate, and so the highercurrent it can be used at for any given rdson. Regular packages include SO-8, D-PAQ and
-
8/8/2019 H Bridge Overview
3/16
D2-PAQ for surface mount and TO-92, TO-220 and TO-3 for through-hole mounting.
There are of course other exotic packages but these are the most common ones. Whenworking with surface-mount packages, it is important to note that thermal characteristicsare highly dependent on the actual PCB layout. As an example, let's take TO-220
package. Without any heat-sink it has a ~60oC/W thermal resistance, and the device itself
can operate up to about 170oC. So, if you can keep the surrounding temperature (called
ambient temperature) below 80oC, you can dissipate 1.5W of power. (1.5*60+80=170).
Now, if you want to be able to switch 10A of current, from P=I2*R you get a maximum
rdson of 15mOhm. That happens to be a quite nice fit for the IRF1010Z MOSFET, whichhas an rdson of 7.5mOhm at 25
oC, and about twice of that at 170oC.
Of course if you can provide better cooling by a heat-sink, or a fan (or both!) than you
can handle much higher currents. You can also shell out more money for MOSFETs with
lower rdson. But there's a catch: the lower rdson gets, the bigger the MOSFET becomes. The
bigger the physical device is, the bigger it's gate will be. The gate forms a capacitortowards the source (and the drain as well, but that's less important for now). SinceMOSFETs are voltage driven devices, their gate-source voltage has to be in a certain
range to be turned on, and in another to be turned off. So, the on and off transient has to
charge and discharge this parasitic capacitor. Given a driver strength, the higher the gate-capacitance is, the longer it takes to charge or discharge it. Why is it important?
MOSFETs have a low rdson when they are fully on, and they conduct almost no current
when they're are completely off. In both cases the dissipated power is relatively low.
However they cannot transition from the on to the off state and vice versa instantly. There
will be a short period where rdson is relatively high, but not high enough to stop significant
current from flowing through the device. In these transitional periods both the voltagedrop on the device (due to rdson) and the current through it are significant, resulting in
high power-dissipation. Naturally you would like to keep this transition time as low as
possible from this perspective, so a higher gate-capacitance will not be desirable. In fact
gate capacitance limits the speed by which the element can be turned on and off, and thusposes an operating frequency limit.
There is another factor to be considered however: the faster the devices are switched the
more sudden the voltage and current changes will be in the circuit. These changes will
then generate EMI interference that is in general not a good thing. In short you don't want
the switching speed (not the frequency!) to be too high or else you will generate too much
electro-magnetic noise.
Switching loss is usually not that big of an issue for low-frequency (couple of hundred
Hz) operation but becomes significant as frequency increases. After a certain point it is
the main contributor to the dissipated heat.
P- versus N- channel high-side switches
Let's spend some time on this choice for the high-side elements. As said before, N-
channel devices would be desirable for this role for their lower losses, but there's a
-
8/8/2019 H Bridge Overview
4/16
problem: for them to operate properly, their source must be connected to the motor leads
and their drain to the power rail. When a P-channel device is used, its source will beconnected to the power rail and its drain to the motor leads. Now, the problem is that bothdevices are controlled by their gate-source voltages. For P-channel devices it means that
if the gate is connected to the power supply, the device will be closed (gate-source
voltage is 0) and if the gate is grounded the device is opened (provided the power-supply
is actually enough to open the device), since gate-source voltage is equal to the power
supply voltage.
For an N-channel device however the picture is more complicated. If you connect the
gate to ground or to source, the device is closed (gate-source voltage is below or equal to
0). But where to connect it to open the device? The power supply is not enough, since,
when the device is open, it's source and drain are roughly at the same potential. Since the
drain is connected to power, the source will be at that potential as well, but than gate
should be higher than that to keep the device open. In fact at minimum 5V higher for so-called logic-level MOSFETs and 10-15V higher for normal MOSFETs. This is asignificant problem, that voltage somehow has to be generated. In most cases some kind
of a charge-pump is used for that, either in a stand-alone or a boot-strapped configuration.
The latter however is only useful if the bridge is driven in the 'locked anti-phase' mode(see later). In any case, these high-side drivers usually cannot deliver as much current asa regular low-side driver can, which means longer turn-on and -off times for the high-side
(lower current takes longer to charge-discharge the gate-capacitance). In high-frequency
operation, where switching loss is a significant factor, a P-channel MOSFET might be a
better solution because of this. In low-frequency, high-current operation, where switching
loss is not a problem, but channel-resistance is, N-channel transistors are usually a better
compromise.
Catch diodes
Catch diodes (D1..D4) are often overlooked or just briefly mentioned in most H-bridge
descriptions, but they are very important components. In fact, the main reason for this
article is to share some experience I had with H-bridges with regards to catch diodes.
The basic principle is very simple: while the bridge is on, two of the four switching
elements will carry the current, the diodes have no role. However once the bridge is
turned off the switches will not conduct current any more. As discussed earlier, by far the
most common load for an H-bridge is an electric DC motor, which is an inductive load.
What this means is that during the on-time the motor will build an electromagnetic fieldinside it. When the switch is turned off, that field has to collapse, and until that happens,
current must still flow through the windings. That current cannot flow through theswitches since they are off, but it will find a way. The catch diodes, are in the design to
provide a low-resistance path for that collapse current and thus keep the voltage on the
motor terminals within a reasonable range.
Now, whenever a diode is conducting current, there will be a relatively constant voltagedrop on it. This is called forward voltage drop and denoted as VF. It is in the
-
8/8/2019 H Bridge Overview
5/16
-
8/8/2019 H Bridge Overview
6/16
Motor model
For the most part, a DC motor can be approximated with an inductor and a voltagesource. In some cases however it is important to model the internal resistance of the
motor as well:
The inductor represents the motor winding. The resistor represents all the electrical losses
in the motor. The voltage source represents the 'generator voltage' and is proportional to
the rotational speed of the motor. It is denoted with Vg. The current through the motor (or
any of the elements, since they're in series) is proportional to the torque of the motor.
There are two important extremes. One is when the motor runs with no load. In this mode
the torque of the motor is only used to compensate for the losses. If we disregard those
for a minute, than we see that the current is 0 (no torque is required) and the voltage on
the motor terminals is Vg. If we consider losses as well, the current is still fairly low, andthe voltage on the motor terminal is still close to Vg.
The other extremes is when the motor is stalled. In this mode their's no rotation, so V g is
0. The motor acts as an inductor. The current through the motor will generate torque but
the voltage on the motor terminals will be 0 (or close to 0 if we consider losses as well).
Though we will in most cases ignore motor losses in the following discussions, or
consider them constant, in many cases motor losses are dependent on the speed. We will
also consider Lm, Rm and Vg to be constant at a given speed, at least for the most part. In
fact however due to the commutation in the motor, and the conducting winding relativeposition to the stators' magnetic field, all of these values are a function of the rotor
position as well. This will become important when we'll discuss back-EMF measurement.
Drive modes
A bridge can be driven in many different ways. In general, the on-time behavior is rather
simple: you have to turn on one high-side and the opposite low-side switch to allowcurrent to flow through the motor. It is the off-time drive that makes a difference. Since
Q1 and Q2 (or Q3 and Q4) should never ever be turned on at the same time, there's only
three different combinations for those two switches. Either Q1 conducts, or Q2 conducts,or none. In the following diagrams I will use a simplified drive notation: low level means
that the low-side is turned on (Q2 or Q4). A mid-level denotes the state where neither ofthe switches conduct, while high means that the high-side is turned on (Q1 or Q3). It is
important to note that actual drive voltages depend on the component selection ('P' or 'N'-
type high-side MOSFETs), and that two independent driving signal will have to be
generated for the two transistors:
-
8/8/2019 H Bridge Overview
7/16
Symbolic and actual drive signals for 'N'-type
high-side MOSFETs
Symbolic and actual drive signals for 'P'-type
high-side MOSFETs
Continuous and discontinuous current
This is actually a switching power supply term, but in many ways H-bridges and step-down power supplies are quite similar. It denotes two significantly different operating
modes of the bridge. Whether the current in the motor reaches 0 during the off-time or
on. If it does, we're talking about discontinuous current mode, if it does not, continuous
current mode. The distinction is important for many reasons, among other things the
dissipated power on the catch diodes will be different. The ratio between the max. currentand the average current on the motor will always be greater than two for discontinuous
and lass then two for continuous mode operation. From this standpoint, continuous mode
is preferred. On the other hand, whenever the current drops to 0, the voltage on the motor
terminals will be Vg (no voltage drop on the resistor or the inductor), which can be used
to measure the speed of the motor.
Whether the circuit operates in continuous or discontinuous mode depends on the drive
mode, the load of the motor (more precisely the speed of the motor) and the power supply
voltage.
In the following discussion I will assume discontinuous operating modes. Thecalculations can be easily repeated for continuous mode as well. Also, I will always
assume that during on-time Q2 and Q3 are conducting, in other words, the motor is
energized in the forward direction.
Sign/Magnitude drive
-
8/8/2019 H Bridge Overview
8/16
This is the simplest drive mode. During on-time (as with all other drive modes) one high-
side switch and the opposing low-side switch is open, the other two are closed. The motorcurrent increases during this period from 0 to its maximum value.
During the off-time, the high-side MOSFET stays on, while the low-side is turned off.
The motor current will continue to flow through Q3 and D1. It cannot flow through D2
since the forward current on D2 is in the opposite direction to the motor current (in other
words D2 will never be forward-biased in this mode). The voltage on the motor terminalswill have to be VF for this. The voltage on the motor coil will be Vg+VF-I*Rm, or
approximately Vg, disregarding Rm. If the motor is under no load, than Vg is
approximately Vbat*ton/tcycle. If the motor is stalled, Vg is 0. Since the current change on
the inductor is proportional to the inductor voltage (VL=L*dI/dt), in the no load case, the
current will decrease very slowly, while in the stalled case, it will decrease in
approximately the same rate as it increased.
Once the current reaches 0, D1 closes, and the generator voltage Vg appears on the motor
terminals. The circuit remains in that state until the next cycle begins.
-
8/8/2019 H Bridge Overview
9/16
As it can be seen from this explanation, D1 is conducting during the off-phase, until
current reaches 0. It starts conducting with the maximum current. Assuming that thecurrent decreases linearly (in other words, neglecting resistive components in the circuit),the total dissipated power is:
PD=VF*Imax*tcollapse/tcycle/2
where tcollapse is the time it takes the current to reach zero, and tcycle is the cycle time.
The time it takes for the field to collapse depends mainly on the voltage that the motor-
inductor sees. Since it is roughly Vg, which can even be 0, the collapse time is rather
long. That means that the diode conducts for a significant amount of time during thecycle, so the power dissipated on the diode is rather substantial, so much so that it can be
damaging to the device. If that is the case, other drive modes has to be employed, where
the diode stress is lower.
A variant of this drive-mode is when instead of Q3, Q2 conducts for the whole durationof the cycle. This results in D4 becoming the conducting element for the collapse current.
The collapse time and other operating parameters of the circuit is roughly the same:
-
8/8/2019 H Bridge Overview
10/16
It is usually a good idea to switch the high-side element as few times as possible, sincetheir turn-on transients are slower, and thus their switching losses are higher. In that sense
the first drive mode preferred. However if the operating frequency is low enough that
switching loss is not an issue, one can equalize the power-dissipation on D1 and D4 by
alternating the two drive-modes. This trick can cut dissipated heat on each of diodes inhalf and can very well move them to the safe operating range. At any rate, higher average
and peak current can be achieved with this operating mode, provided that the diodes arethe limiting factor.
Lock anti-phase drive
This rather popular drive mode removes almost all stress from the catch-diodes. In this
mode, the motor is energized in the reverse direction during the off-time. In other wordsduring the on-phase Q2 and Q3 are conducting while in the off time Q1 and Q4 are on.
The diodes never carry current except for the short period of switching the transistors.
-
8/8/2019 H Bridge Overview
11/16
During the off-time the voltage on the motor windings is roughly Vbat+Vg, significantlyhigher than for the previous drive modes. This results in much faster collapse of the field.
The problem however with this drive mode is that once the current reaches 0, it continues
to decrease, into the negative values. At this point the motor is energized in the reverse
direction, effectively trying to turn the shaft in the wrong direction. Another characteristicof this drive is that the generator voltage (Vg) never appears on the motor terminals. It is
not a big problem for traditional motor driver circuits however if back-EMF speed-control is to be used, this drive mode is not suited for it.
Active field-collapse drive
This is a variation of the above idea: during the off-time connect the battery in the reverse
direction to the motor, so that the collapse of the field is faster, however don't let themotor current to become too negative.
-
8/8/2019 H Bridge Overview
12/16
In this mode, during on time we have the usual Q2 and Q3 conducting, but in the off-
time, we turn off both of them, and turn on Q1. This result in D4 becoming forward-biased, opening and start conducting current. The motor inductor still sees Vbat+Vg, so thefield collapses in the same rate as in the previous mode. However once, the current
reaches 0, D4 closes, and Vg starts appearing on the motor terminals. The problem with
this however is that, since the left side terminal is pulled to V bat and the motor still rotates
in the forward direction, Vg will forward-bias D3, and open it. The result is that motor is
effectively short-circuited, and the generator voltage instead of appearing on the motor
terminals, manifests on the internal windings. This in turn will start generating currentthrough the motor again, though in a much slower rate than it was collapsing previously.
The load on the diode (in this case D4) is non-0, but much lower than in thesign/magnitude drive case, since the collapse happens much faster. There is some power
dissipated on D3 as well, but that is again is much lower than previously since the motor
current only slowly increases - in the same rate as it collapsed in the sign/magnitude drive
case - but it starts from 0 and not from Imax.
-
8/8/2019 H Bridge Overview
13/16
Just as in the previous drive mode, the generator voltage never appears on the motor
terminals, so this drive mode isn't suited for back-EMF based control either.
Modified active field-collapse drive
If it is possible to measure motor terminal voltages in the circuit, some modifications can
be made to the above drive mode to make it more efficient. As it can be seen from the
previous diagrams, when the motor current reaches 0, the 'B'-side motor terminals voltage
jumps from ground to Vbat+VF. If the circuit can detect this transition and turn Q1 off,and Q2 on, the motor will not open D3 any more, Vg can appear on the motor terminals,
and the current remains 0.
This drive-mode removes all stress from D3, the only conducting diode will be D4.
However it inherits the fast collapse of the motor current from the previous design, and so
it dissipates significantly less power than the sign/magnitude drive modes.
-
8/8/2019 H Bridge Overview
14/16
One interesting characteristics of the active-collapse drive modes (both the original and
the modified) is that the collapse current flows through the battery. What it in effectmeans that during the off-time the collapse-current charges the battery back. While ingeneral this is a good thing, it has to be ensured that the battery is be able to sink that
current, otherwise Vbat starts rising potentially to dangerous levels. If the battery cannot
sink the energy pumped back by the collapse-current, a large capacitor must be connected
to the power supply to damp the battery voltage-increase. The exact value of this
capacitor can be calculated from the amount of charge the collapse-current delivers
(Imax*tcollapse/2) and the maximum allowed battery voltage increase. In general this will bea rather large value.
Of course the same technique can be done on the low-side, using Q4 and D1 for the
collapse-current. It is also possible to alternate Q1 and Q4 drive-modes, thus splitting the
diode-load in half.
Synchron collapse drive
If one can measure the current through the motor, and accurately detect when it crosses 0,
it becomes possible to modify the lock anti-phase drive in a different way. In this case,
during the off-phase Q1 and Q4 are conducting, but only until the field collapses. At that
moment, both Q1 and Q4 are turned off and instead Q2 (or Q3) are turned on. This will
allow Vg to appear on the motor terminals, but none of the diodes will be forward-biased
so the current remains 0 for the rest of the off-cycle.
-
8/8/2019 H Bridge Overview
15/16
Since the diodes never conduct except for the short switching periods, the powerdissipated on them is insignificant. However this mode requires rather precise detection
of the zero-crossing of the motor current, which might be hard to do reliably.
Which drive-mode to use?
The choice of the drive-mode depends on many things, but here are some guide-lines:
If collapse current is not an issue, but operating frequency is high, consider thesign/magnitude drive, with the high-side continuously conducting.
If diode power dissipation is a problem, but operating frequency is still rather
high, see if distributing diode load by alternating the two sign/magnitude drivescan get you within limits
If the motor is not expected to ride under high loads or low speeds, consider
locked anti-phase drive.
-
8/8/2019 H Bridge Overview
16/16
If back-EMF measurement is not an issue, the active-collapse drive can be a goodcompromise between power dissipation and complexity.If back-EMF measurement is important, or the design can tolerate the additionalcomplexity, the modified active-collapse drive, or the synchron collapse drive can
be a good choice
For the highest current application synchron collapse drive is ideal, or maybe the
locked anti-phase drive, if accurate current measurement is not possible.