
Guia MAQUINARIA AGRÍCOLA
80
MAQUINARIA AGRÍCOLA BARINAS, 2009 MSC. JORGE A. ZAMUDIO B. [email protected] REPUBLICA BOLIVARIANA DE VENEZUELA Ministerio del Poder Popular para la Educación Superior Instituto Universitario de Tecnología del Estado Barinas IUTEBA
-
Upload
juan-lopez -
Category
Documents
-
view
251 -
download
5
Transcript of Guia MAQUINARIA AGRÍCOLA
2
MAQUINARIA AGRÍCOLA
BARINAS, 2009
MSC. JORGE A. ZAMUDIO B.
REPUBLICA BOLIVARIANA DE VENEZUELA
Ministerio del Poder Popular para la Educación Superior
Instituto Universitario de Tecnología del
Estado Barinas
IUTEBA
3
INDICE
INTRODUCCIÒN Pàg. 1.Mantenimiento 1
1.1. Sugerencias para el Mantenimiento. 3
1.2. Mantenimiento Industrial. 4
1.3. Diagnostico Técnico. 7
2. Máquinas Agrícola. 12
2.1. Ciclo de desarrollo y evolución de la mecanización agrícola. 13
2.2. Tractor. 15
2.3. Mercado Agrícola. 20
2.4. Funciones Básicas. 21
2.5. Tipos. 21
2.6. Potencia. 22
2.7. Característica técnica del tractor agrícola. 25
2.8. Donde y como se mide la potencia de un tractor. 26
2.9. Principales dimensiones. 26
3. Potencia. 28
3.1. Potencia en los diversos sistemas. 29
3.2. Curva del motor. 30
3.3. Esfuerzo de tracción. 34
3.4. Adherencia. 37
3.5. Tracción. 37
3.6. Resbalamiento. 38
3.7. Soluciones para de deslizamiento y la adherencia. 39
4. Sistema de acople y enganche del tractor. 40
4.1. Modo de enganche del apero. 40
4.2. Comportamiento tractor-aperos. 42
4.3. Ejercicios. 44
4.4. Elevador hidráulico y enganche tres puntos. 45
4.5 Acople de implemento a los tres puntos. 48
4.6. Elevador hidráulico. 49
4.7. Equipo hidrostático. 50
4.8. Sistema de enganche con control automático. 50
4.9. Control automático de posición. 51
4.10. Control automático de tiro. 51
4.11. Barra de tiro y ganchos. 54
4.12. Regulación de la barra oscilante. 55
4.13. Toma de fuerza. 56
4.14. Embrague de accionamiento de la toma de fuerza. 56
4.15. Árbol de transmisión cardanica. 58
4.16. Condición de regulación de una transmisión cardanica. 58
4.17. Mecanismo de toma de fuerza. 60
4.18. Sujeción de toma de fuerza. 61
4
4.19. Polea. 62
5. Transmisión. 63
5.1. Reductor. 64
5.2. Relación de transmisión. 65
5.2.1. Ruedas dentadas. 65
5.2.2. Correas. 66
5.2.3. Cadenas cinemáticas. 66
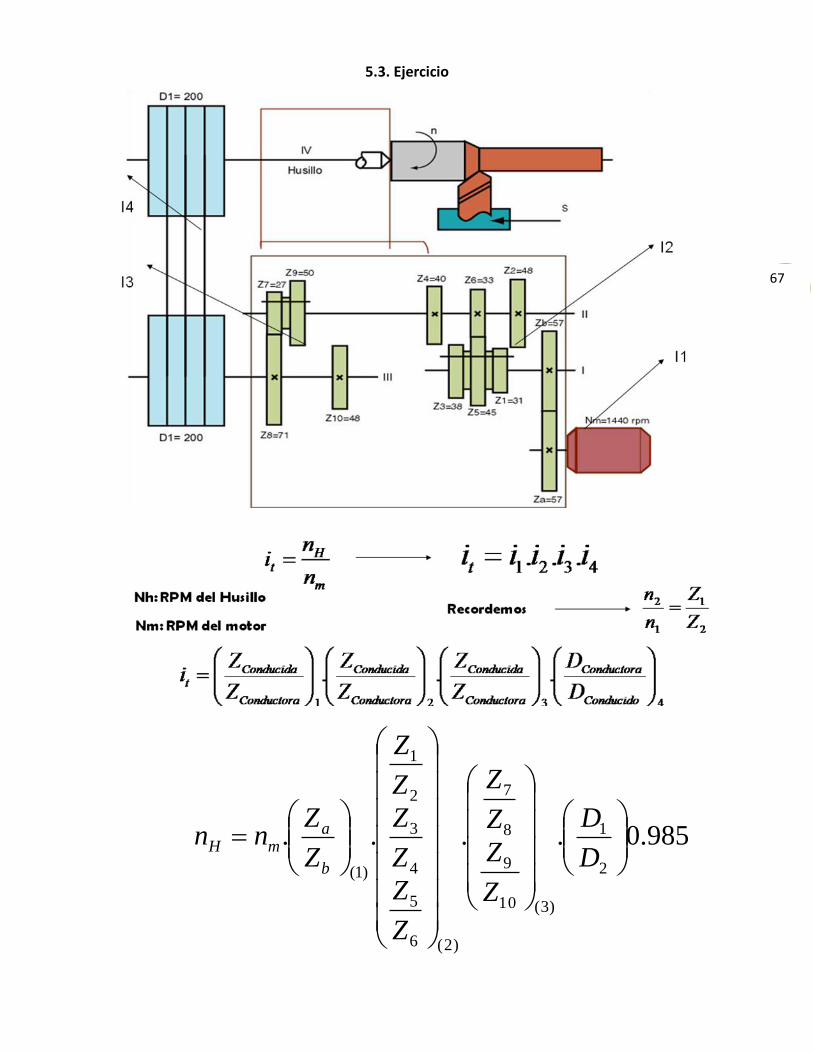
5.3. Ejercicio. 67
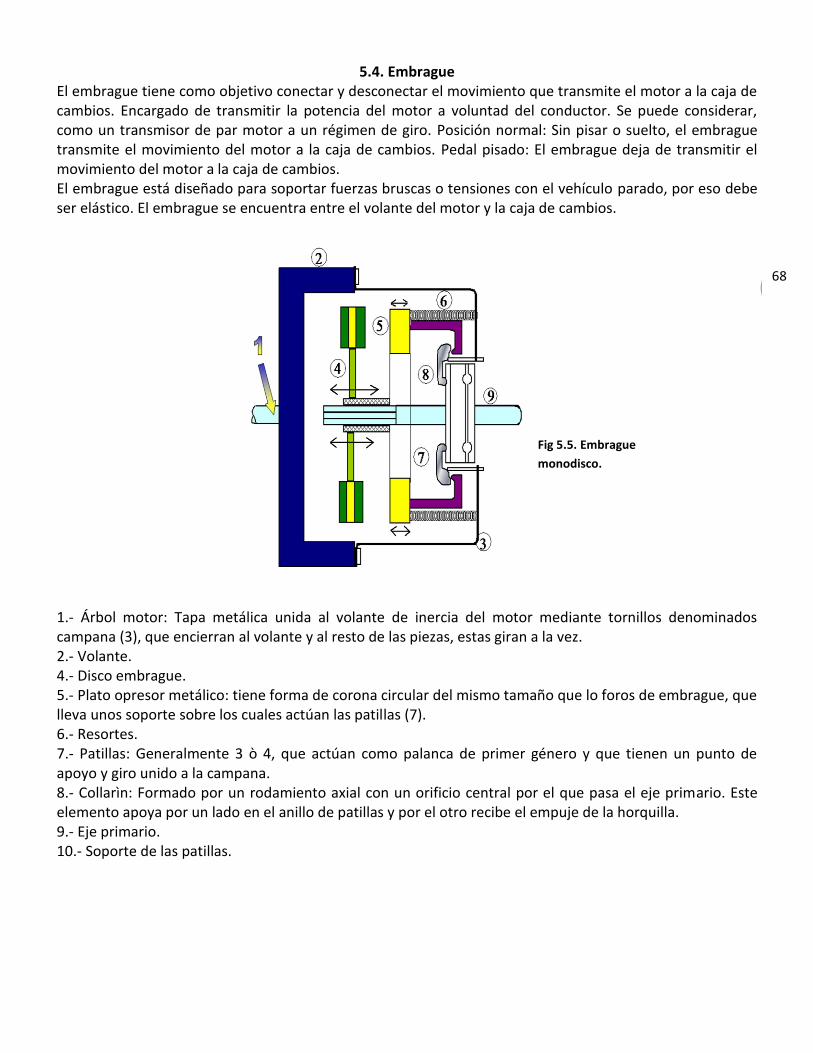
5.4. Embrague. 68
5.4.1 Disco de embrague. 69
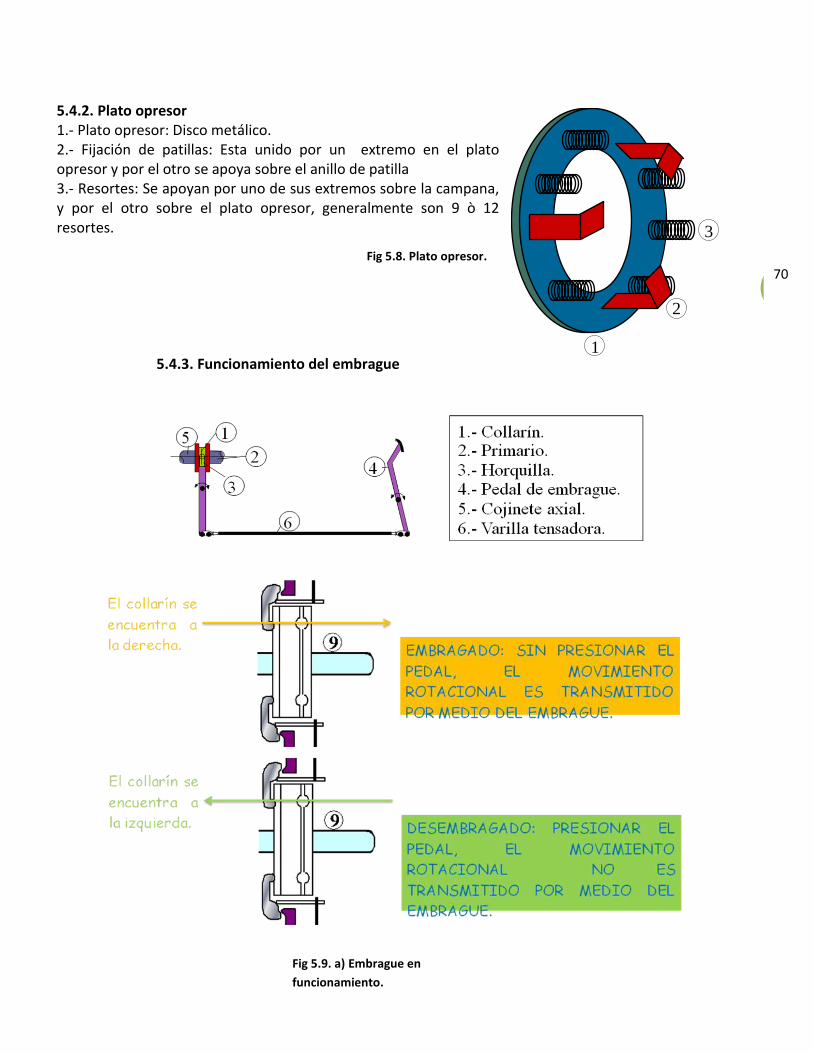
5.4.2. Plato opresor. 70
5.4.3. Funcionamiento del embrague. 70
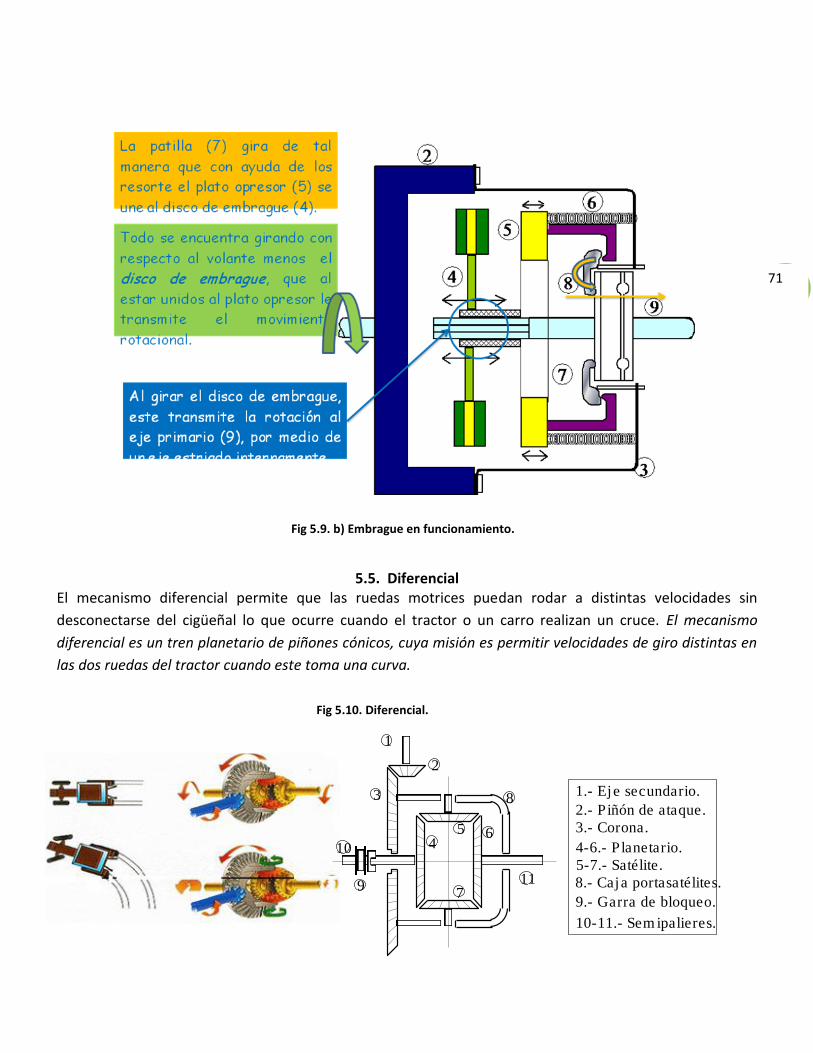
5.5. Diferencial. 71
REFERENCIAS 72
5
6
INTRODUCCIÒN
La soberanía alimentaria es un punto estratégico para todo gerente de cualquier país, la
alimentación es la fuente de energía más importante para el ser humano. Hoy en día la población
se ha incrementado, lo que origina que algunos países como los asiáticos tomen medidas para
regular la natalidad. Es importante saber que para alimentar a un país que cuenta con una
población considerable, es necesario contar con maquinarias para dinamizar los procesos
productivos.
Una de las características que determinan si un país es desarrollado o no es la tecnología
empleada en las actividades agrícolas. La mecanización agrícola ha permitido aumentar la
producción, lo que ha originado que el personal que laboraba en el campo sea sustituido por
máquinas y a su vez ha aumentado el impacto al medio ambiente que debido muchas veces se
debe al uso irracional de las máquinas. Con todo esto la mecanización agrícola tiene sus ventajas
pero se debe generar planes para minimizar sus desventajas, por tal motivo es necesario crear
métodos para que exista la integración entre los proceso productivo de un país y el personal
dedicado a la investigación que este caso son las instituciones de educación.
En el Instituto Universitario de Tecnología del Estado Barinas se dicta el programa de formación
de mecánica, el cual cuenta con la unidad formación Maquinaria Agrícola, en donde se enseña a
los educandos la importancia que tiene el mantenimiento de la maquinaria agrícola para el
proceso productivo y para el planeta tierra. A demás se profundiza en el conocimiento del tractor
agrícola, donde en cada lapso de estudio los participantes deben reparar algún equipo agrícola y
de esta manera consolidar el conocimiento teórico impartido.
A continuación se presenta una guía teórica, en donde se sintetiza el contenido básico que los
participantes deben analizar para cumplir con la unidad de formación, además dicha información
puede ser de importancia para cualquier personal que estén interesado en su contenido. La guía
consta de cinco puntos, los cuales fueron tomados de fuente virtual, libros, revistas y compilación
de expertos en el área.
“El objetivo siempre escapa de nosotros. Mientras mayor sea el progreso, mayor la comprensión
de nuestra falta de mérito. La satisfacción reside en el esfuerzo, no en el resultado. Plenitud de
esfuerzo es plenitud de victoria”. Ghandi
7
I.MANTENIMIENTO ¿Qué es Mantenimiento preventivo? Conjunto de normas establecidas por los fabricantes de los equipos, las cuales tienden a reducir averías, ahorrar costos de operación y mantener todo el conjunto en óptimas condiciones de trabajo. El mantenimiento preventivo se realiza para evitar el mantenimiento correctivo o reparación y sustitución. PREGUNTAS IMPORTANTES ¿Por qué debe realizarse el mantenimiento preventivo? ¿Cuándo se debe hacer el mantenimiento preventivo? ¿Qué debe hacer un operador de tractor antes de encender y arrancar el tractor? ¿Qué debe hacer un operador de tractor cuando finaliza una faena? ¿Con que debe contar un administrador de finca para ejecutar el mantenimiento preventivo? En las actividades agrícolas la preparación de las máquinas para el trabajo tiene gran importancia. Tiempo Las labores de campo deben cumplirse en plazos agro técnicos reducidos. PERO para obtener un buen producto (arado, siembra o cosecha), debe existir sincronización entre los elementos.
Fig. 1.1. Ilustración de la relación que existe entre las máquinas y el tiempo.
Fig. 1.2. Mantenimiento preventivo
en maquinaria agrícola.
1
8
El mantenimiento preventivo y oportuno de las máquinas, genera altas eficiencias en las actividades agrícolas.
Fig. 1.3. Elementos a los que está sometido comúnmente la Maquinaria Agrícola.
Fig. 1.4. Consecuencias de la máquina al no ser preparada.
2
9
1.1. Sugerencias para el mantenimiento preventivo
El manual del operador es una guía de operación del tractor. Es la base fundamental para desarrollar un buen programa de mantenimiento. El operador es la persona encargada de todo lo que se refiere al mantenimiento de equipo, máquina, implementos, tractores agrícolas. Esta persona debe ser calificada. Manual de mantenimiento preventivo
Fig. 1.5. Elementos importantes para el mantenimiento preventivo de una máquina agrícola.
Fig. 1.6. Relación hombre, máquina y ecosistema.
3
10
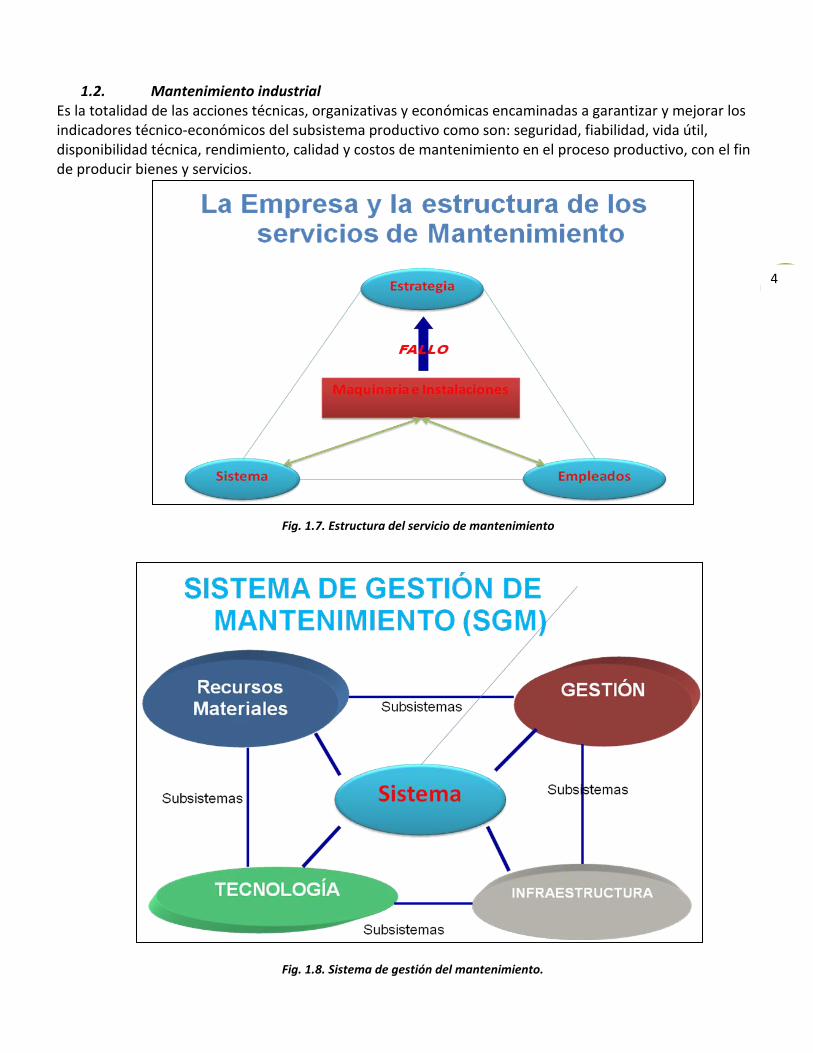
1.2. Mantenimiento industrial
Es la totalidad de las acciones técnicas, organizativas y económicas encaminadas a garantizar y mejorar los indicadores técnico-económicos del subsistema productivo como son: seguridad, fiabilidad, vida útil, disponibilidad técnica, rendimiento, calidad y costos de mantenimiento en el proceso productivo, con el fin de producir bienes y servicios.
Fig. 1.7. Estructura del servicio de mantenimiento
Fig. 1.8. Sistema de gestión del mantenimiento.
4
11
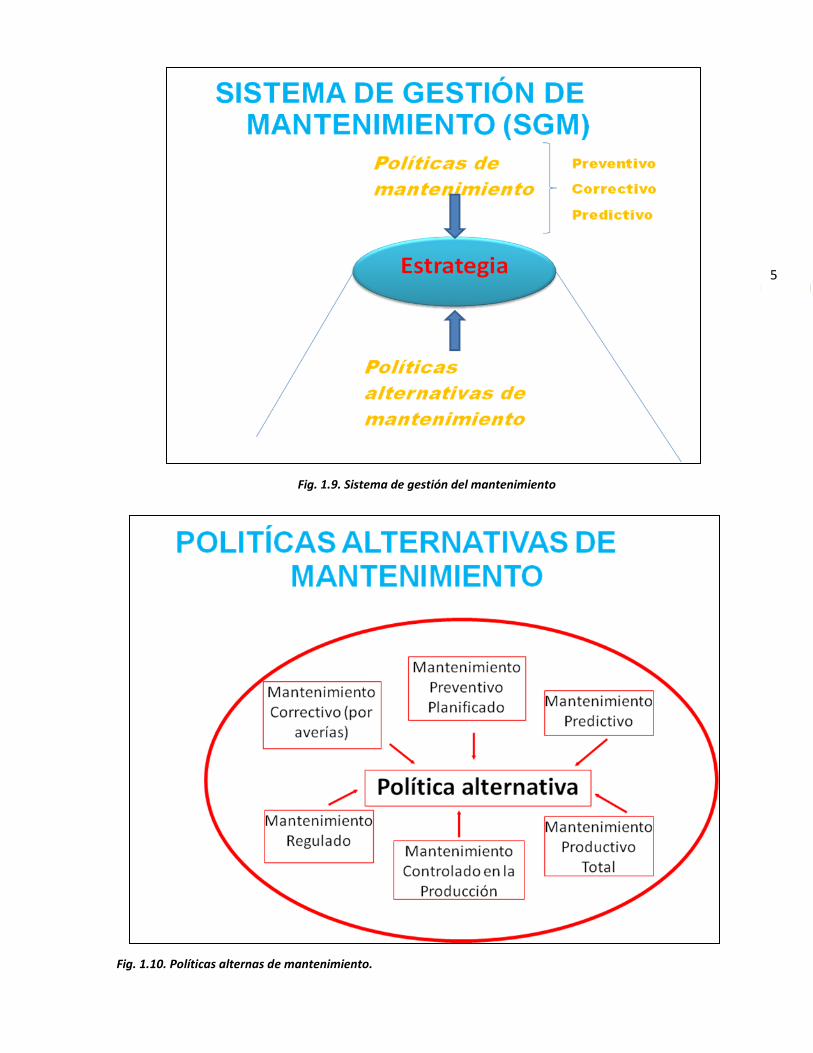
Fig. 1.9. Sistema de gestión del mantenimiento
Fig. 1.10. Políticas alternas de mantenimiento.
5
12
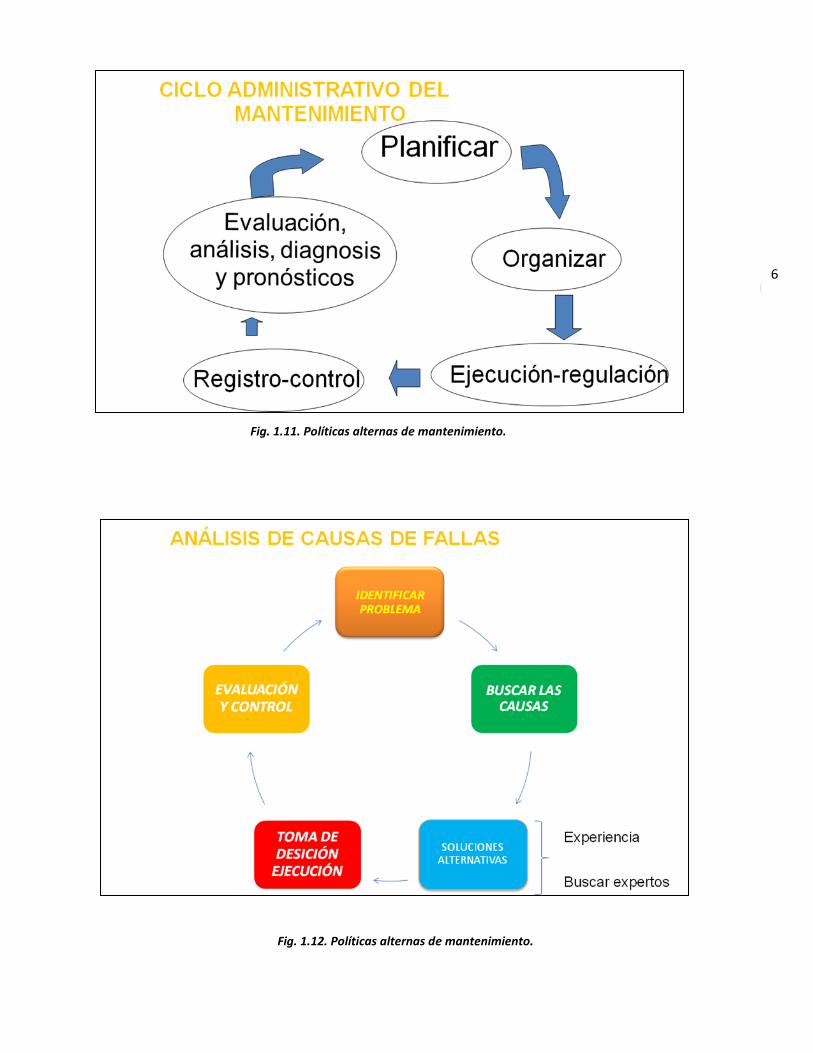
Fig. 1.11. Políticas alternas de mantenimiento.
Fig. 1.12. Políticas alternas de mantenimiento.
6
13
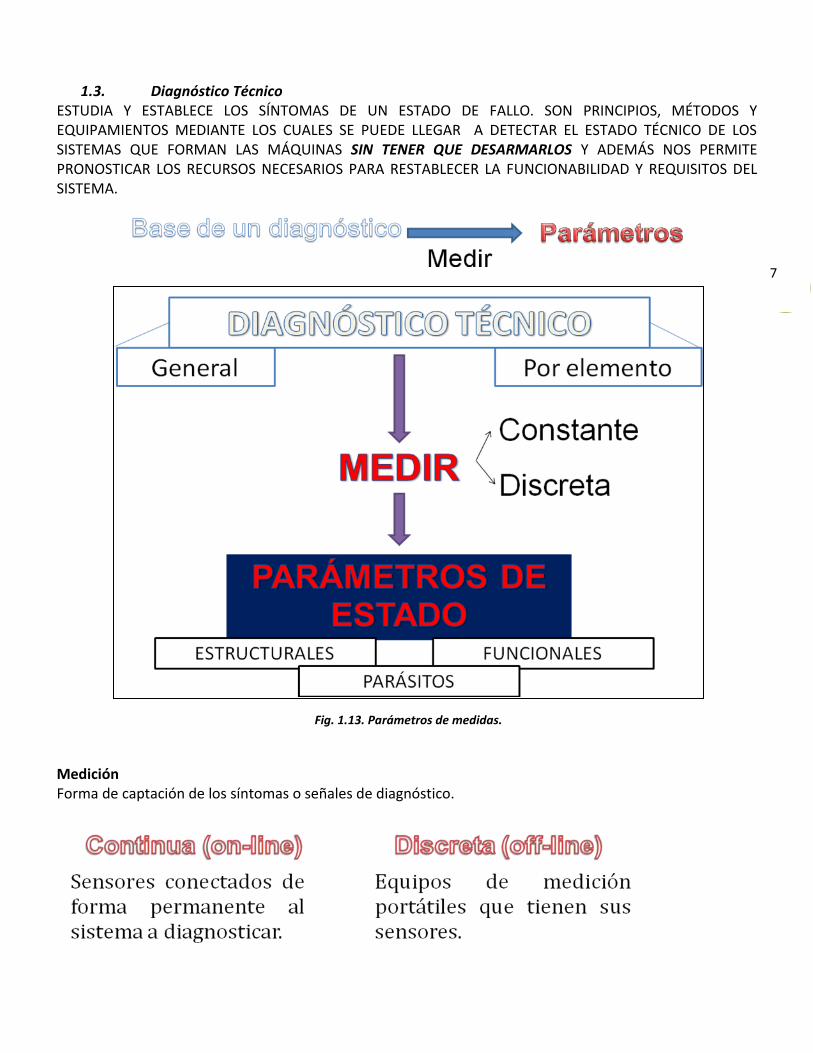
1.3. Diagnóstico Técnico
ESTUDIA Y ESTABLECE LOS SÍNTOMAS DE UN ESTADO DE FALLO. SON PRINCIPIOS, MÉTODOS Y EQUIPAMIENTOS MEDIANTE LOS CUALES SE PUEDE LLEGAR A DETECTAR EL ESTADO TÉCNICO DE LOS SISTEMAS QUE FORMAN LAS MÁQUINAS SIN TENER QUE DESARMARLOS Y ADEMÁS NOS PERMITE PRONOSTICAR LOS RECURSOS NECESARIOS PARA RESTABLECER LA FUNCIONABILIDAD Y REQUISITOS DEL SISTEMA.
Medición Forma de captación de los síntomas o señales de diagnóstico.
Fig. 1.13. Parámetros de medidas.
7
14
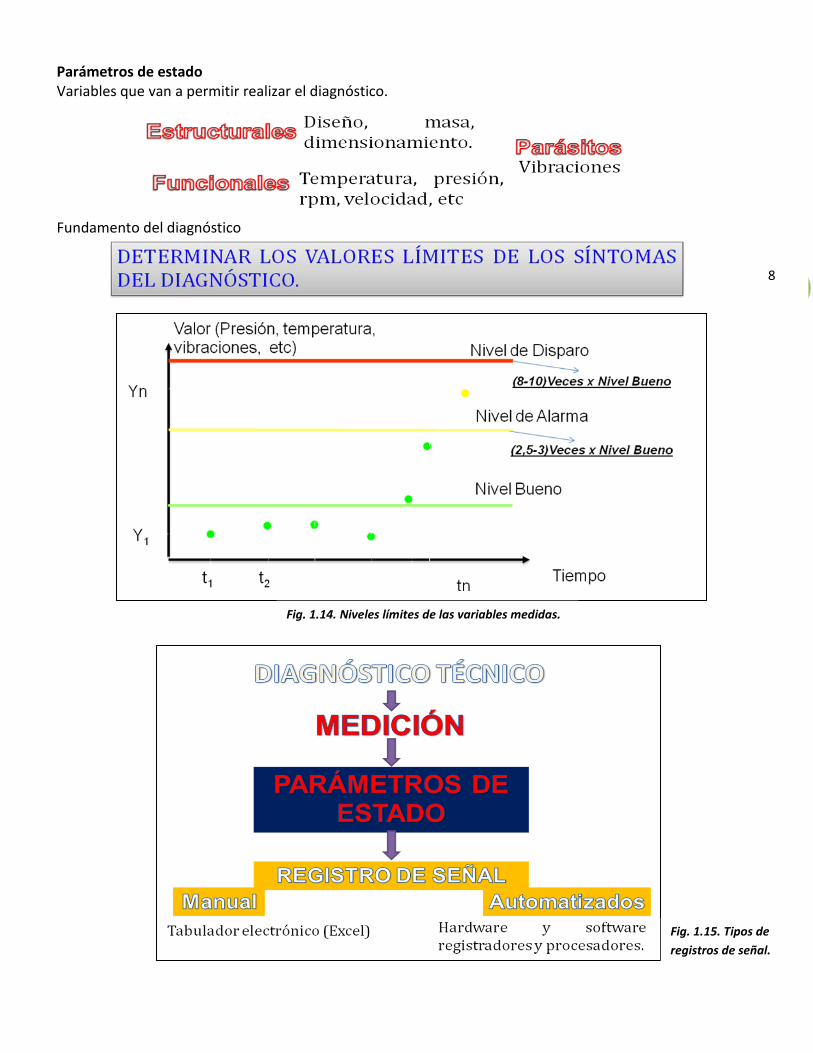
Parámetros de estado Variables que van a permitir realizar el diagnóstico. Fundamento del diagnóstico
Fig. 1.14. Niveles límites de las variables medidas.
Fig. 1.15. Tipos de
registros de señal.
8
15
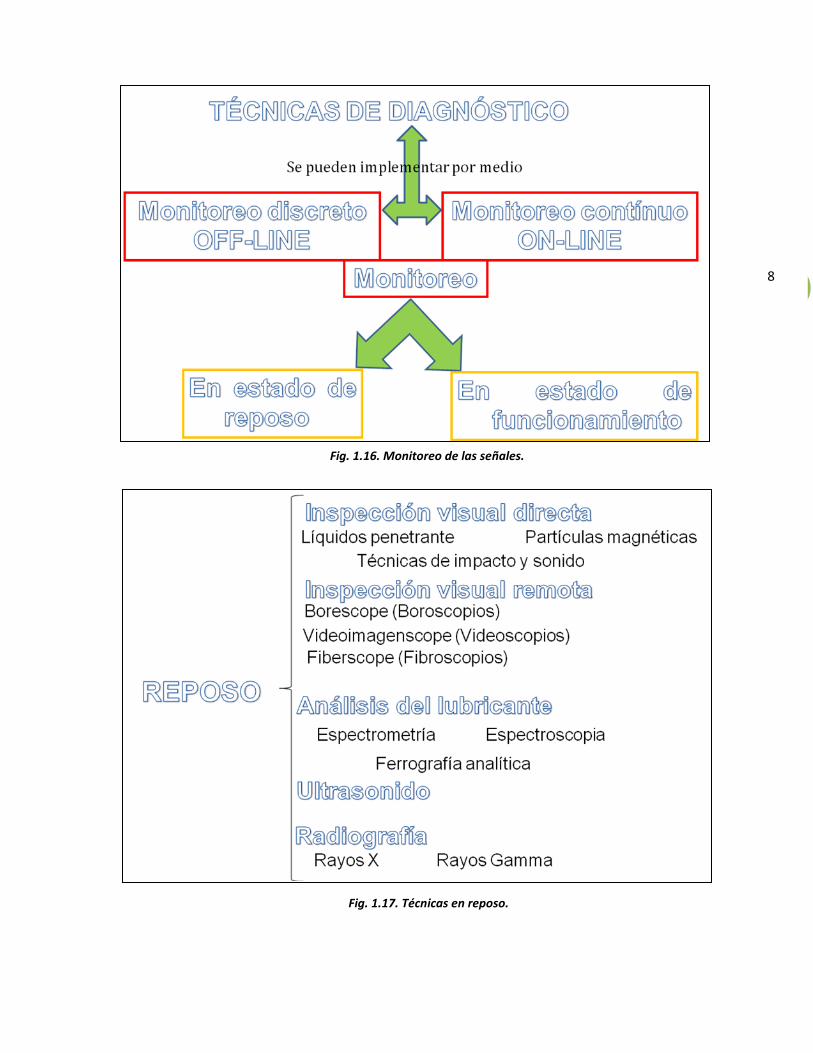
Fig. 1.16. Monitoreo de las señales.
Fig. 1.17. Técnicas en reposo.
8
16
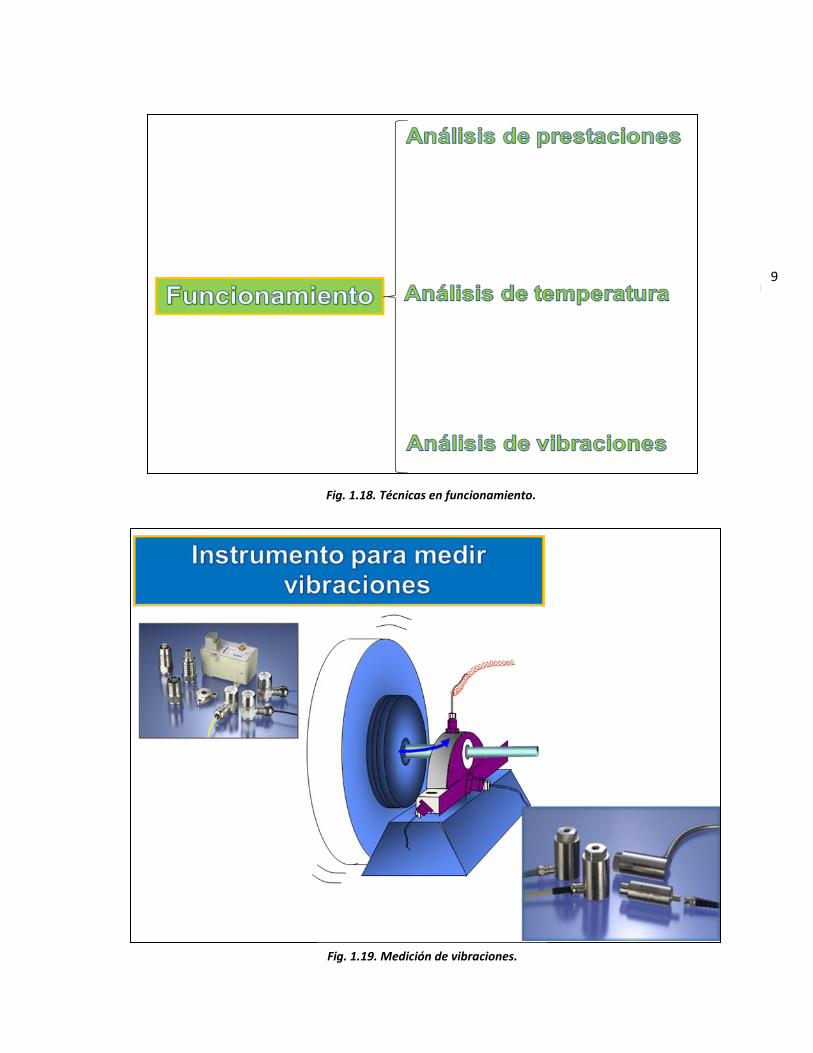
Fig. 1.18. Técnicas en funcionamiento.
Fig. 1.19. Medición de vibraciones.
9
17
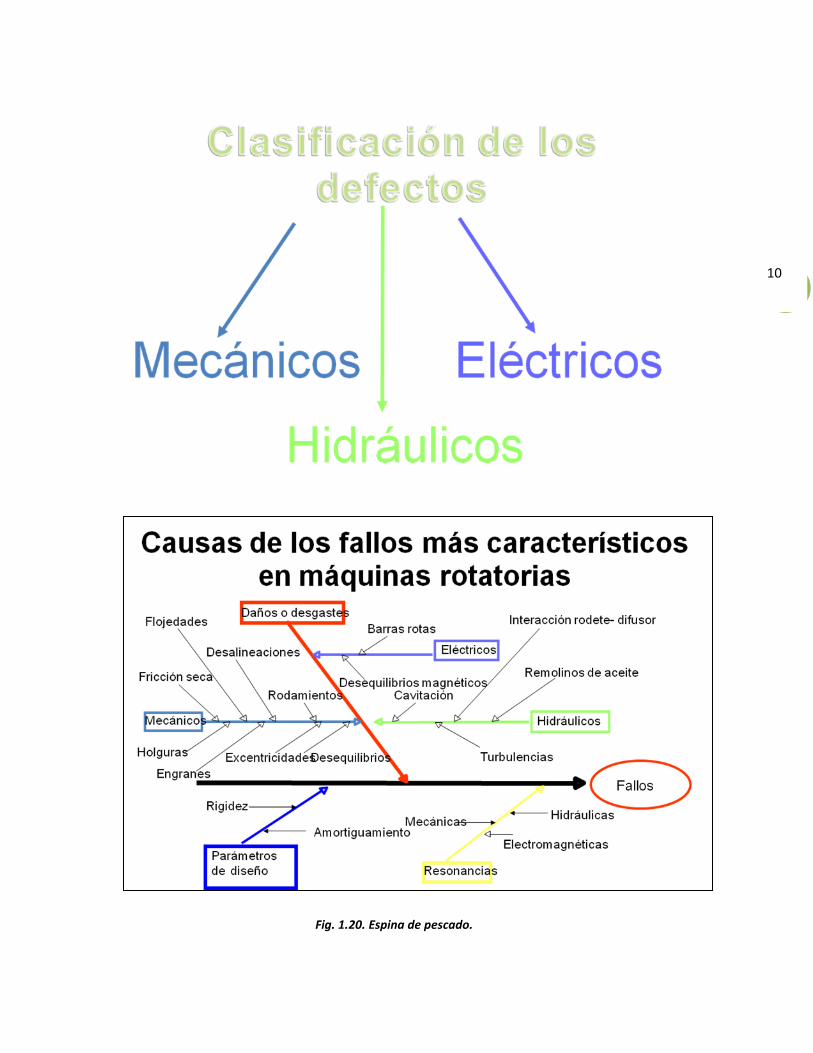
Fig. 1.20. Espina de pescado.
10
18
Fig. 1.21. Rodamiento en mal estado.
Fig. 1.22. Ventilador en mal estado.
11
19
II. MÁQUINA AGRÍCOLA Se denomina toda máquina cuyos órganos de trabajo cumplen determinadas operaciones de producción agrícola y que se acciona o traslada mediante un medio que le transmite energía, bien sea un motor propio o elementos externos como un motor o la energía de hombres, animales, u otra fuente energética cualquiera. Las máquinas agrícolas más comunes son los tractores, combinadas, implementos, medios de transportación y otros equipos. Mecanización agrícola La mecanización de la agricultura es un proceso progresivo de enorme alcance e importancia. La producción agrícola puede ser incrementada bien sea incorporando más tierra o por medio de un aumento de la productividad de las que ya se encuentran utilizadas. La introducción de máquinas y equipos para efectuar trabajo s agrícolas puede ser un factor importante para facilitar el aumento de la productividad. MÁQUINA AUTOPROPULSADA Es una máquina agrícola con fuente energética propia que le permite realizar sus operaciones productivas o su desplazamiento. Por ejemplo: una combinada autopropulsada de cosecha de granos. MÁQUINA DE ARRASTRE Es una máquina agrícola que depende de una fuente energética externa para realizar sus operaciones productivas o su desplazamiento. Por ejemplo: una carreta.
• Máquina integral es la que está montada sobre el bastidor de un tractor, independientemente de la facilidad o no de su separación del mismo.
• Máquina semi-integral es la que parte de su masa descansa sobre el tractor y el resto se apoya sobre ruedas.
• Máquina suspendida es la que puede ser levantada o bajada a voluntad mediante el sistema hidráulico de levante de tres puntos del tractor.
Tractor Se ha convertido en el símbolo más importante de la mecanización de la agricultura. Se define como “planta automotriz polivalente”, cuya capacidad de conversión y aplicación de la energía los convierte en un vehículo que puede ser usado para tirar, propulsar y suministrar potencia a los equipos y aperos utilizados para realizar las operaciones agrícolas. El tractor moderno es el resultado de una permanente actividad tecnológica de mejoramiento a través del tiempo. Implemento agrícola Se denomina un dispositivo que se adiciona y se desplaza agregado a un medio energético, y se caracteriza por no tener movimiento propio. La vinculación de un implemento a su medio energético se denomina agregación, por lo cual en ese proceso se le denomina agregado. La gama de implementos agrícolas es muy amplia e incluye arados, gradas, cultivadores, etc. Asperjadoras Las asperjadoras de campo, mal llamadas pulverizadoras, son usadas principalmente para el control de plagas y enfermedades y para aplicar otros productos tales como desecantes o aceleradores de madurez en las plantas. Combinadas Es una máquina agrícola generalmente con motor propio, que realiza varias operaciones simultáneas como corte, recogida, trilla o separación, limpieza, almacenamiento y descarga de un producto. Tiene un sistema para su conducción y rodaje por campo o caminos. Entre ellas están las combinadas de cosecha de granos, de forraje, etc.
12
20
Acanterado El acanterado es la formación de canteros. Cantero es una franja de terreno con un ancho y alturas determinados, y su parte superior plana o alomada, bordeado de pequeños surcos. Si el cantero es ancho y plano, su parte superior se denomina plato. La función del cantero es la siembra sobre el mismo de las semillas o plantas, para protegerlas del agua, la que corre por los surcos laterales. Carta Tecnológica Es un documento que contiene las operaciones tecnológicas que se realizan a un cultivo o actividad agrícola y en el cual se relacionan al menos, para cada labor, la fuente energética, la máquina o implemento, período de realización, exigencia agrotécnica, productividad, consumo de fuerza de trabajo, consumo de combustible y otros indicadores productivos y económicos. Tecnología agrícola Es el conjunto y secuencia de labores u operaciones que se realizan para cumplimentar todas las fases u operaciones en la producción de un cultivo o en uno de sus conjuntos o fases del proceso productivo, y que generalmente se recogen en los instructivos técnicos y en las cartas tecnológicas. Fertilización Comprende las labores mediante la cual se aplica un producto químico, biológico o natural para aumentar la fertilidad del suelo y su capacidad de brindar nutrientes al cultivo Protección Fitosanitaria Es la labor mediante la cual se aplican determinados productos químicos, biológicos o naturales para el control de plagas y enfermedades en los cultivos. También se le conoce como fumigación o asperjado. Los medios de aplicación pueden ser asperjadoras movidas por tractor o de tracción animal o asperjadoras transportada al hombro de un operador con accionamiento manual (mochilas) o con motor (motomochilas). Cosechas Las labores de cosecha comprenden un conjunto de labores manuales y mecanizadas. Comprende el arranque de frutos, corte de plantas, frutos, tallos o espigas, el hilerado, la recogida, limpieza, colocación en el medio de transporte y a veces envase.
2.1. CICLO DE DESARROLLO Y EVOLUCIÓN DE LA MECANIZACIÓN AGRÍCOLA El análisis que han realizados los científicos y autores interesados en el tema concluyen que existe tres momentos, épocas, tres ciclos de desarrollo y evolución de la mecanización agrícola. Estos ciclos se diferencian por la ENERGÍA utilizada o aplicada y por el grado de PRODUCTIVIDAD alcanzado en ese momento. Cada ciclo tiene su límite y lo determina la energía usada en momento de la historia, es decir, que la energía es el factor que define el desarrollo evolutivo en cada ciclo.
- Ciclo humano. - Ciclo animal. - Ciclo máquina.
Ciclo I (Fuerza muscular del ser humano). MOTOR HUMANO. El hombre, para realizar un trabajo físico utiliza sus músculos para ejercer fuerza, empleando ciertos puntos de aplicación de su potencia como son las manos, los pies y otras partes de su cuerpo como espalda, la cabeza, etc. Todo trabajo muscular se corresponde con una transformación físico-química donde se consume la energía contenida en alimentos ingeridos. Ciclo II (Fuerza muscular de los animales). MOTOR ANIMAL. Los animales mejor adaptados para realizar trabajos agrícolas son los equinos y bovinos y en particular el caballo, la mula y el buey. En algunas regiones se utilizan ocasionalmente el búfalo y hasta el camello. La potencia que se puede obtener de un motor animal depende básicamente de sus características
13

21
particulares y del tipo de raza, sexo, altura, peso, talla, calidad de alimentación y entrenamiento para el trabajo en particular. El motor animal posee mayor elasticidad que los motores mecánicos y se puede adaptar al trabajo en superficies irregulares y gran pendiente, y realizar esfuerzos variables dentro de límites relativamente amplios. Comparándolos con el motor humano su elasticidad es mayor y asimismo mayores sus posibilidades de movimiento, pudiendo aplicar su potencia para transportar materiales en sus lomos o en trabajos de tracción.
Fig 2.1. Sistema de
explotación
agrícola como caja
negra
Fig 2.2. Caja negra estructura básica de una máquina agrícola.
14

22
2.2. TRACTOR Maquinaria agrícola motorizada para arrastre o acoplamiento de otras máquinas las que no poseen su propio elemento propulsor. Máquina que produce tracción o arrastre. Vehículo con ruedas provistas de dispositivos de adherencia para terrones de tierra. Vehículo de trabajo con motor propio, diseñado para arrastrar o empujar maquinaria especial o cargas pesadas sobre el terreno. Son muy utilizados en agricultura, construcciones, trazado de carretera y en servicios especializados en plantas industriales, estaciones ferroviarias de mercancías y muelles, máquinas quitanieves y las excavadoras. El profesor Dr. Eladio Aranda Heredia (E.T.S.I.A de Madrid) gran impulsor de la mecanización de la agricultura española decía que, en el campo “el tractor es el rey de la maquinaria” Dos objetivos básicos de la mecanización agrícola:
- Aumentar la productividad. - Mejorar la ergonomía del trabajo agrícola.
Evolución (siglo XX) LOS PRIMEROS TRACTORES CONSTRUIDOS COMO MÁQUINA AUTOPROPULSADAS DATAN DE 1890, AUNQUE: 1810, Pratt en Inglaterra, realizó un primer arado alternativo arrastrado por cable mediante dos máquinas de vapor a ambos lados. Las primeras máquinas de vapor no tenían sistema de tracción y sus aplicaciones agrícolas las hacían mediante transmisiones por correa. Los primeros tractores con motor de vapor aparecieron cuando se consiguió un sistema de transmisión a las ruedas del vehículo.
La rodadura del tipo triciclo hizo más fácil el diseño, y aunque al principio las ruedas fueron lisas. Posteriormente para facilitar la rodadura las y mejorar la capacidad de tracción las ruedas se dotaron de nervaduras o tetones.
1850, John Foster en Inglaterra y Max Eyth en Alemania perfeccionaron los tractores arados que se habían construidos en esa época. 1859, primeras perforaciones petroleras en Pennsylvania (USA).
15

23
1890, aparecieron los primeros tractores con motor de combustión interna, cuando las patentes de Otto expiraron. Los tractores construidos con motor de ciclo Otto se parecían enormemente a los primitivos tractores accionados por máquinas de vapor, pero: potencia mucho más elevada y su peso reducido, originaron problemas debido a la reducida capacidad de tracción. 1909, Paul Ford construyo un tractor con motor a gasolina de 2 cilindros. Los constructores a partir de ahora se enfocaron a producir tractores grandes y pesados con ruedas de transmisión cada vez más ancha y con mayor diámetro para mejorar la capacidad de tracción. Tipo triciclo, la rueda directriz es la trasera y las ruedas motrices de gran diámetro eran lisas.
1910, se construyo el tractor PIONNER, se decía: que era el más rápido, tenía una caja de cambio de tres velocidades para adelante, motor de 4 cilindros, 30 CV de potencia de tracción, tenía una polea para transmisión de potencia a otras máquinas por medio de correas. El aumento de la potencia de los motores, origino
fabricar grandes y anchas ruedas metálicas, primero con tetones y luego con garras. Se construyó un tractor semioruga del tipo triciclo, para aumentar la capacidad de tracción y evitar la compactación del terreno.
1911, Hito fue la primera demostración de tractores en Omaha (Nebraska) 1912, se construyó en Mannhein (Alemania) el tractor LANDRAL, el cual: pesaba 5000 kg, tenía un sistema de rodadura con ruedas metálicas con banda de rodadura lisa gran anchura y diámetro y una potencia de tiro. Las garras en la banda de rodadura fue una solución muy eficaz, pero presentaba limitaciones en el transporte por las vías de circulación.
16
24
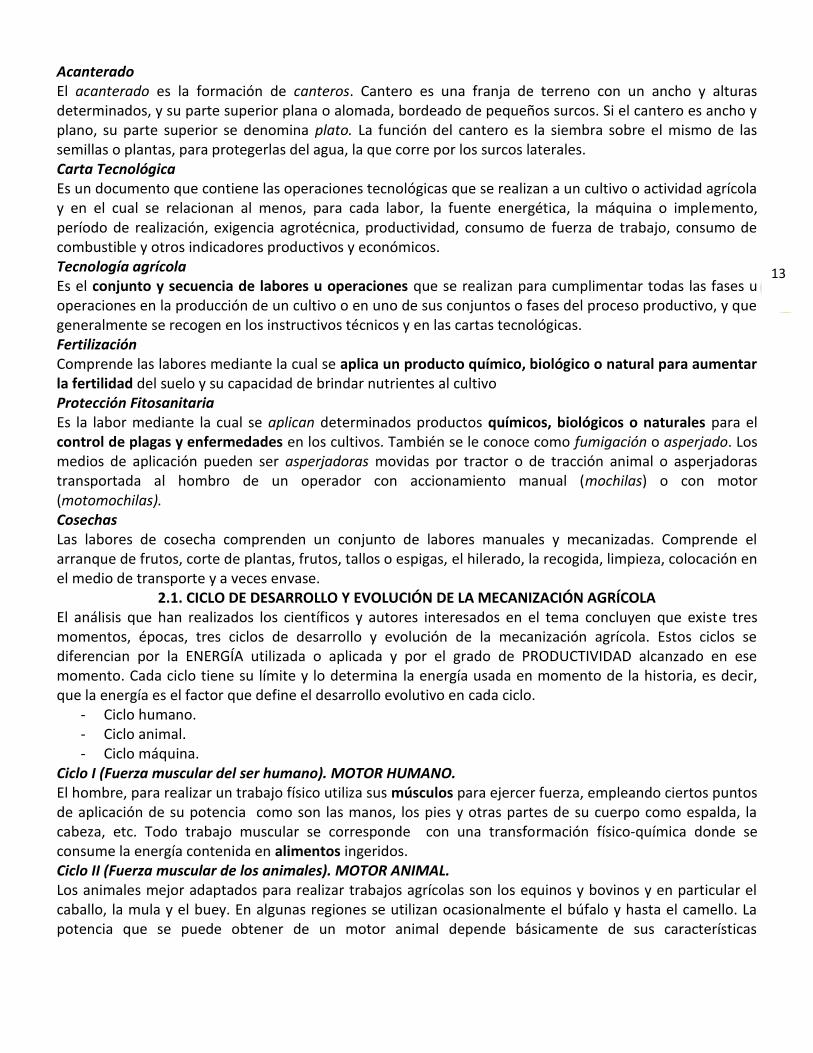
1914, Primera guerra mundial, causa de la revolución industrial. 1915, primeros tractores provistos por toma de fuerza. 1918, se construyo el WATERLOO BOY, este fue el precursor de la amplia gama de John Deere y este tenía: una caja de cambio situada en un lateral del motor, un sistema mixto de lubricación (presión+barboteo) que daba una larga duración a los cojinetes del motor y de la caja de cambio. Se construyeron tractores con motores a gasolina capaces de utilizar otros combustibles volátiles. En esta época se aprecian detalles que indican grandes avances técnicos, como: filtro de aire en baño de aceite, tubos de escapes colocados hacia arriba, válvulas en cabeza y refrigeración por agua presurizada. Además la transmisión tenía diferencial y en la rodadura ancho de vía variable. También tenía, toma de fuerza.
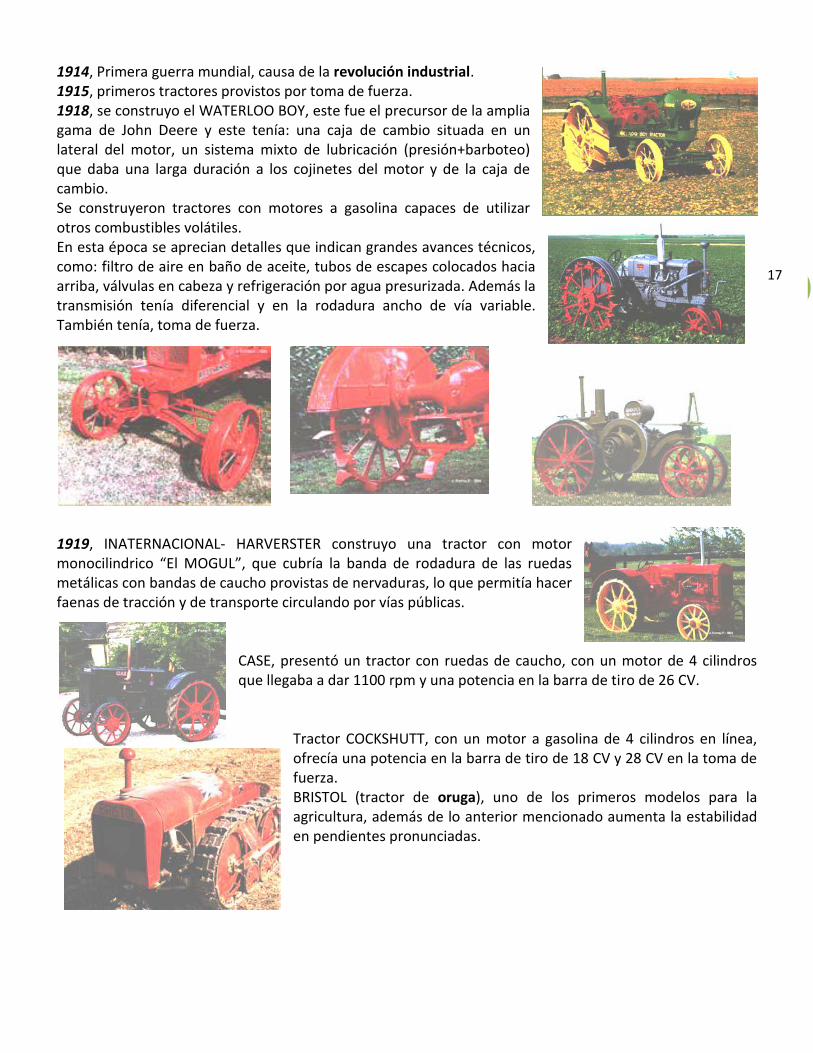
1919, INATERNACIONAL- HARVERSTER construyo una tractor con motor monocilindrico “El MOGUL”, que cubría la banda de rodadura de las ruedas metálicas con bandas de caucho provistas de nervaduras, lo que permitía hacer faenas de tracción y de transporte circulando por vías públicas.
CASE, presentó un tractor con ruedas de caucho, con un motor de 4 cilindros que llegaba a dar 1100 rpm y una potencia en la barra de tiro de 26 CV.
Tractor COCKSHUTT, con un motor a gasolina de 4 cilindros en línea, ofrecía una potencia en la barra de tiro de 18 CV y 28 CV en la toma de fuerza. BRISTOL (tractor de oruga), uno de los primeros modelos para la agricultura, además de lo anterior mencionado aumenta la estabilidad en pendientes pronunciadas.
17

25
1921, LANZ introdujo un tractor sencillo, aplicando el ciclo Diesel, provisto de un motor monocilindrico con pistón horizontal que desarrollaba 12 CV, con defectos en los sistema de rodadura y de frenado, robusto, bajo precio, su máxima velocidad de funcionamiento era 42 km/h y el avance o el retroceso lo determinaba el sentido de rotación del motor. 1929, apareció el BULLDOG HP ALLARD con tracción en las cuatro ruedas (los experimentos de Coulomb permitieron demostrar la importancia de la doble tracción), con motor de inyección, doble diferencial que le permitía ofrecer más potencia a la barra. El peso en vacío tenía una distribución prácticamente igual en ambos ejes. Su motor con ciclo diesel, quemaba alquitrán, gasoil, grasas animales y vegetales y se refrigeraba con agua.
CLETRAC, tractor de cadenas de moderna tecnología, utilizaba un tren de rodadura con rodillos estancos para apoyo de las cadenas y un tensor en la parte superior, y además tenía polea y toma de fuerza y ofrecía una potencia a la barra de 26 CV.
1931, tractor RUMLEY 6, con un motor de gasolina con 6 cilindros y tracción simple con sistema de rodadura de neumáticos inflables. Los neumáticos no tenían nervaduras sino tetones para mejorar la capacidad de tracción.
1936, OLIVER 70 tipo triciclo, provisto de un motor de 6 cilindros a gasolina, con válvulas en cabeza y refrigerada por agua forzada (llegaba hasta 1500 rpm). Con neumáticos, dotadas de pequeñas nervaduras. 1937, TRANSPPORT de la firma LANZ,
con 35 CV y cabina cerrada, caja de cambios de 6 marchas hacia adelante y 2 hacia atrás, alcanza 23 km/h en carretera.
En la década de los 30 convencida de un campo comercial importante la firma John Deere entró en el mercado del tractor pequeño y lanzó varios modelos.
18

26
1938, tractor AO lanzado por la firma John Deere, especialmente adaptado a las plantaciones frutales. Tenía un motor Otto de dos cilindros provisto con un volante de inercia que llegaba a 975 rpm. Su peso de 2300 kg y sus ruedas de neumáticos inflables de gran anchura, le permitía circular por las calles de las plantaciones. Aportó un ancho de vía variable tanto en el eje trasero como el delantero 1939, Modelo BR (Jhon Deere), el tractor provistos de contra peso en las ruedas motrices, altas nervaduras en las bandas, excelentes características de robustez, especialmente concebido para campo abierto
Modelo 650 G (LANZ), tenía motor diesel (45 CV), caja de cambio con 6 marchas hacia adelante y diseño robusto.
1940, Modelo A (Jhon Deere), tenía un ancho de vía variable, una caja de cambios formando un bloque con el motor, lo que permitía aumentar el espacio libre bajo los ejes del tractor posibilitando el trabajo sobre los surcos. La toma de fuerza se normalizó, el equipo hidráulico fue adoptado, y se comercializaron tractores de toma de fuerza, enganche tres puntos y equipo hidráulico que permitía ajustes en marcha. 1950, Serie 30 (Jhon Deere), comodidad de trabajo al conductor por medio de asientos amortiguados (ergonomía). 1960, Modelo 7030 (KUBOTA), mejoran la ergonomía, con motor diesel, cambios de marchas perfeccionados. Modelo l2550 (KUBOTA) tracción en las 4 ruedas, motor de 4 cilindros, cuatro tiempos, inyección directa,
1935 cm3 y un régimen de giro nominal de 2600 rpm. Provisto de toma de fuerza independiente, enganche tripuntual con control hidráulico, dirección hidráulica, frenos de disco, equipo eléctrico completo de 12v, asientos con suspensión y posición regulable. Tiene un peso 1120 kg y un panel de instrumento que permite un continuo y cómodo control del tractor. Serie 30 (KUBOTA), confort del conductor, cabina insonorizada y asiento con suspensión y gran visibilidad.
19
27
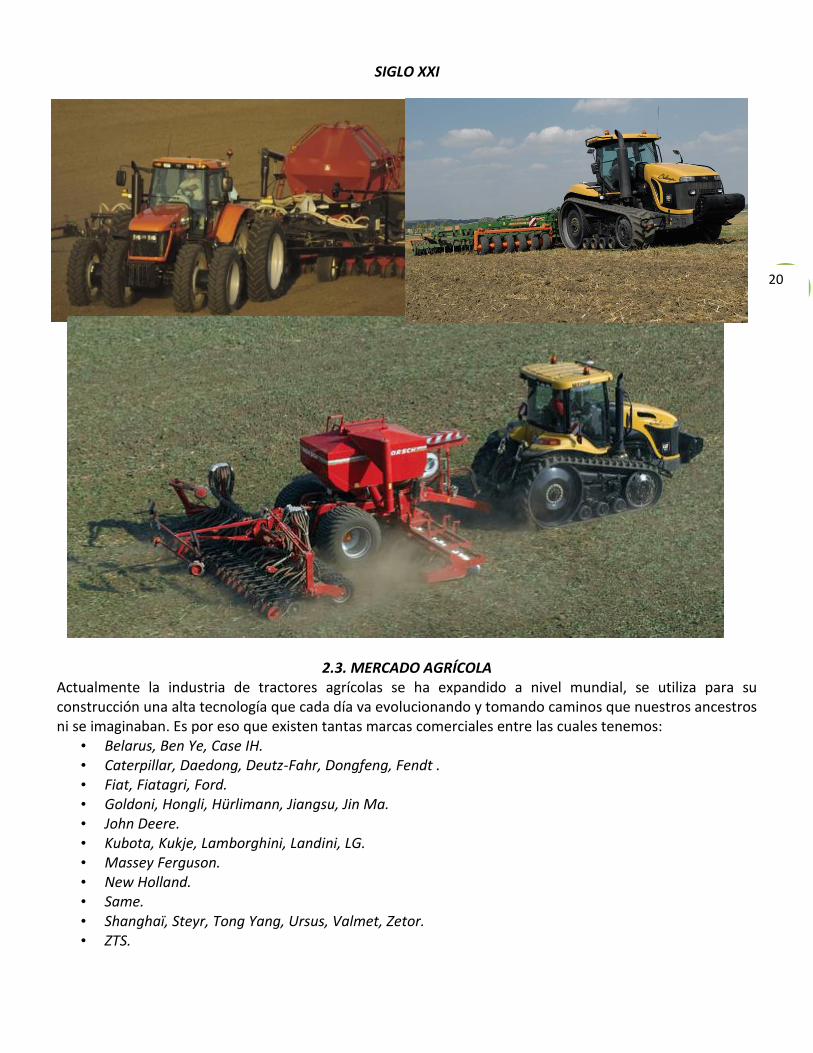
SIGLO XXI
2.3. MERCADO AGRÍCOLA
Actualmente la industria de tractores agrícolas se ha expandido a nivel mundial, se utiliza para su construcción una alta tecnología que cada día va evolucionando y tomando caminos que nuestros ancestros ni se imaginaban. Es por eso que existen tantas marcas comerciales entre las cuales tenemos:
• Belarus, Ben Ye, Case IH. • Caterpillar, Daedong, Deutz-Fahr, Dongfeng, Fendt . • Fiat, Fiatagri, Ford. • Goldoni, Hongli, Hürlimann, Jiangsu, Jin Ma. • John Deere. • Kubota, Kukje, Lamborghini, Landini, LG. • Massey Ferguson. • New Holland. • Same. • Shanghaï, Steyr, Tong Yang, Ursus, Valmet, Zetor. • ZTS.
20
28
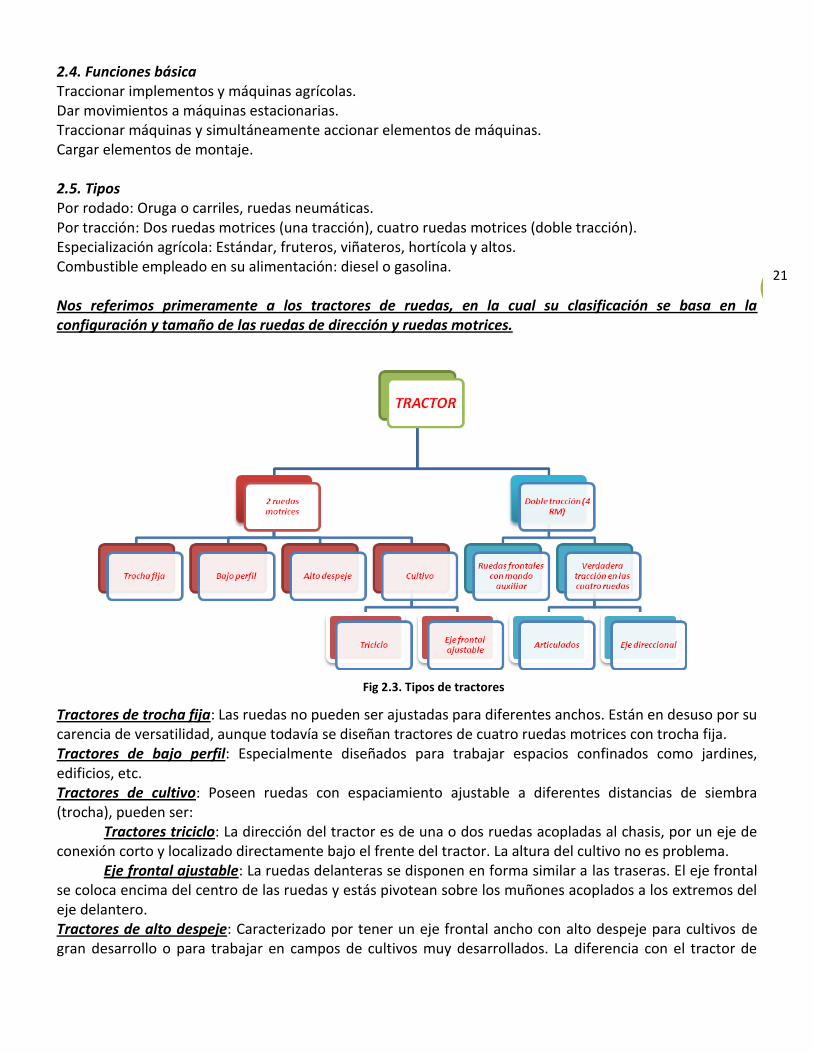
2.4. Funciones básica Traccionar implementos y máquinas agrícolas. Dar movimientos a máquinas estacionarias. Traccionar máquinas y simultáneamente accionar elementos de máquinas. Cargar elementos de montaje. 2.5. Tipos Por rodado: Oruga o carriles, ruedas neumáticas. Por tracción: Dos ruedas motrices (una tracción), cuatro ruedas motrices (doble tracción). Especialización agrícola: Estándar, fruteros, viñateros, hortícola y altos. Combustible empleado en su alimentación: diesel o gasolina. Nos referimos primeramente a los tractores de ruedas, en la cual su clasificación se basa en la configuración y tamaño de las ruedas de dirección y ruedas motrices. Tractores de trocha fija: Las ruedas no pueden ser ajustadas para diferentes anchos. Están en desuso por su carencia de versatilidad, aunque todavía se diseñan tractores de cuatro ruedas motrices con trocha fija. Tractores de bajo perfil: Especialmente diseñados para trabajar espacios confinados como jardines, edificios, etc. Tractores de cultivo: Poseen ruedas con espaciamiento ajustable a diferentes distancias de siembra (trocha), pueden ser:
Tractores triciclo: La dirección del tractor es de una o dos ruedas acopladas al chasis, por un eje de conexión corto y localizado directamente bajo el frente del tractor. La altura del cultivo no es problema.
Eje frontal ajustable: La ruedas delanteras se disponen en forma similar a las traseras. El eje frontal se coloca encima del centro de las ruedas y estás pivotean sobre los muñones acoplados a los extremos del eje delantero. Tractores de alto despeje: Caracterizado por tener un eje frontal ancho con alto despeje para cultivos de gran desarrollo o para trabajar en campos de cultivos muy desarrollados. La diferencia con el tractor de
Fig 2.3. Tipos de tractores
21
29
cultivo es mayor de 30 a 35 cm (luz libre). Para lograr esto, el tractor cuenta con un sistema especial de engranajes que transmitan la potencia desde el eje a las ruedas motrices. Tractores con ruedas frontales de mando auxiliar: El sistema de ruedas delanteras son modificadas para que sean motrices, aunque estas ruedas son generalmente más grandes en relación a las usadas en las versiones no motrices, sigue siendo más pequeñas que las ruedas traseras. La potencia a estas ruedas delanteras puede transmitirse en forma hidráulica o mecánica. Tractores con tracción verdadera en las cuatro ruedas: En estas tractores las cuatros ruedas son del mismo tamaño.
Tractores articulados: Existe un par de ejes rígidos, no direccionales, acoplados a dos cuerpos separados, pero conectados entre sí. Se emplea un mecanismo hidráulico para dirigir el tractor.
Tractor con eje de dirección: Este tipo de tractor puede ser dirigido por las ruedas frontales solas, por las ruedas traseras o por ambas simultáneamente.
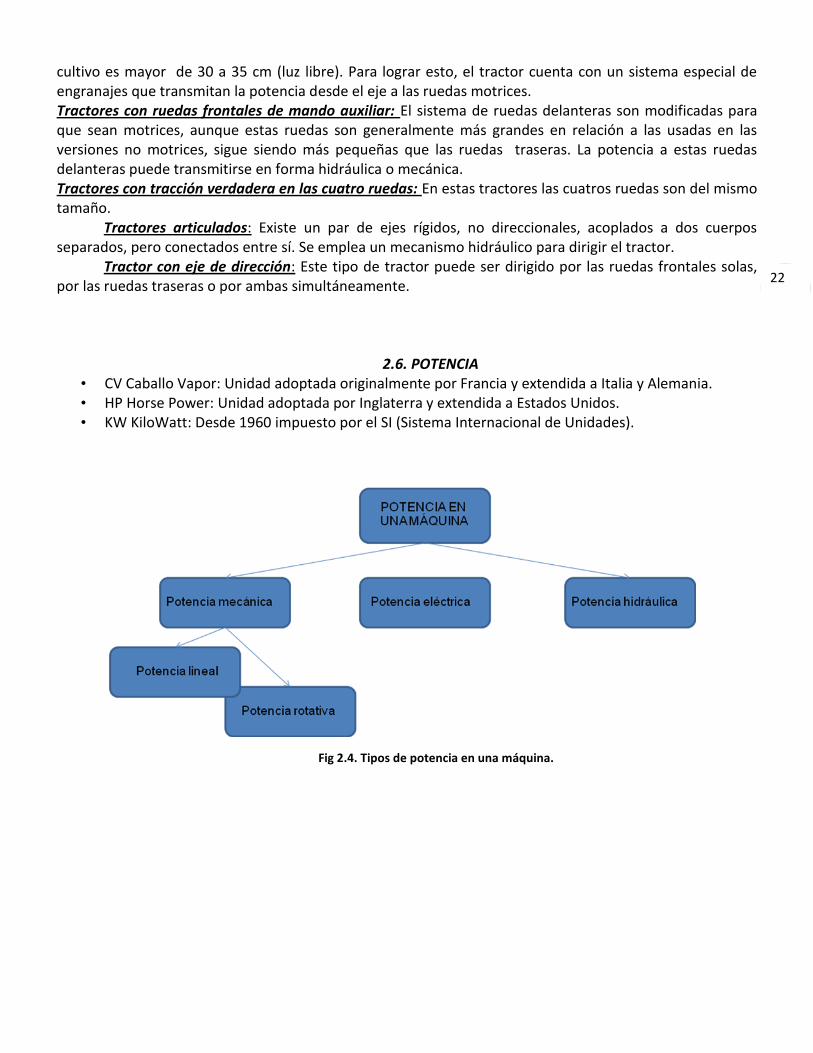
2.6. POTENCIA • CV Caballo Vapor: Unidad adoptada originalmente por Francia y extendida a Italia y Alemania. • HP Horse Power: Unidad adoptada por Inglaterra y extendida a Estados Unidos. • KW KiloWatt: Desde 1960 impuesto por el SI (Sistema Internacional de Unidades).
Fig 2.4. Tipos de potencia en una máquina.
22

30
ESTRUCTURA FUNCIONAL DEL TRACTOR Potencia mecánica rotatoria Ocurre en cuerpos en rotación e involucra el concepto de torque o momento de torsión o par. El momento de torsión es el producto de longitud de un brazo de palanca (radio de una polea, engranaje o eje) y de una tuerca que actúa perpendicularmente libre del brazo. Se expresa en N m, libras pie o kg m dependiendo del sistema de unidades. Potencia hidráulica Los sistemas hidráulicos transmiten la potencia desde una fuente de energía hasta una maquina o mecanismo utilizando la presión hidráulica para obtener fuerza en diferentes puntos específicos. En los sistemas hidráulicos de maquinas se transmite a través de un liquido confinado dentro de un circuito, y con ayuda de una bomba. Potencia mecánica lineal La potencia lineal ocurre cuando se ejerce una fuerza con una velocidad lineal. Ejemplo: la potencia desarrollada por el tractor cuando acciona un implemento acoplado al enganche.
Fig 2.5. Estructura funcional del tractor.
23
31
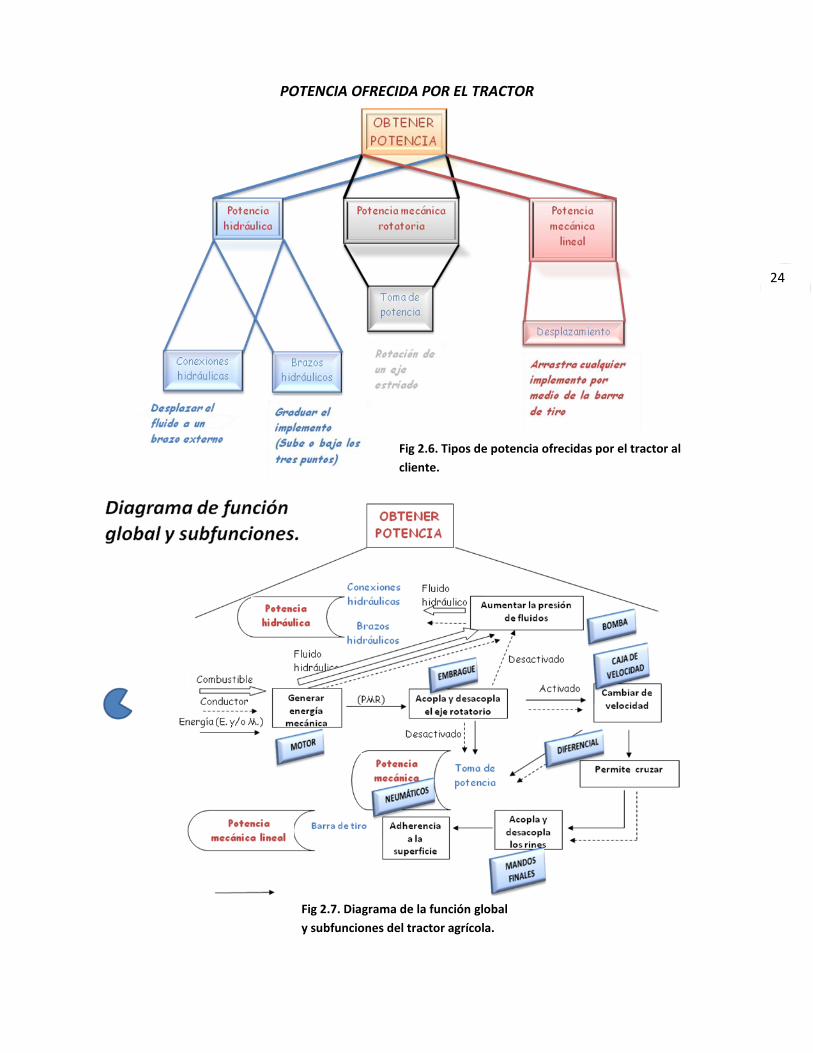
POTENCIA OFRECIDA POR EL TRACTOR
Fig 2.6. Tipos de potencia ofrecidas por el tractor al
cliente.
Fig 2.7. Diagrama de la función global
y subfunciones del tractor agrícola.
24
32
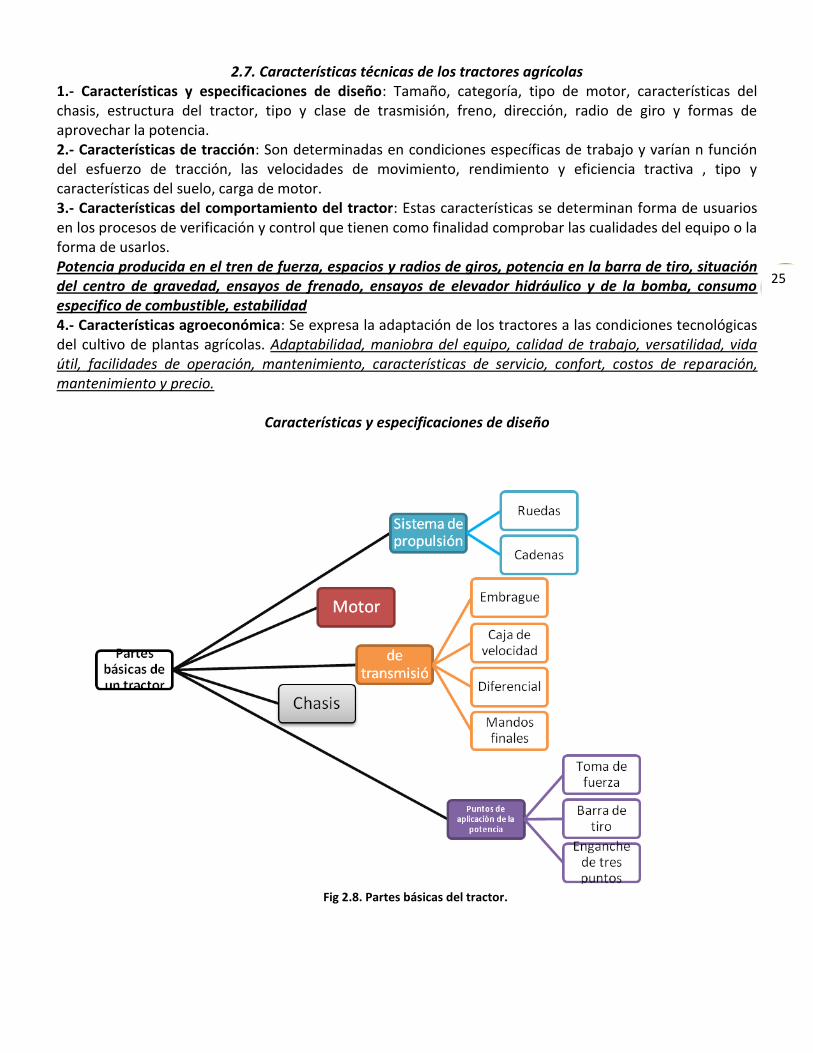
2.7. Características técnicas de los tractores agrícolas 1.- Características y especificaciones de diseño: Tamaño, categoría, tipo de motor, características del chasis, estructura del tractor, tipo y clase de trasmisión, freno, dirección, radio de giro y formas de aprovechar la potencia. 2.- Características de tracción: Son determinadas en condiciones específicas de trabajo y varían n función del esfuerzo de tracción, las velocidades de movimiento, rendimiento y eficiencia tractiva , tipo y características del suelo, carga de motor. 3.- Características del comportamiento del tractor: Estas características se determinan forma de usuarios en los procesos de verificación y control que tienen como finalidad comprobar las cualidades del equipo o la forma de usarlos. Potencia producida en el tren de fuerza, espacios y radios de giros, potencia en la barra de tiro, situación del centro de gravedad, ensayos de frenado, ensayos de elevador hidráulico y de la bomba, consumo especifico de combustible, estabilidad 4.- Características agroeconómica: Se expresa la adaptación de los tractores a las condiciones tecnológicas del cultivo de plantas agrícolas. Adaptabilidad, maniobra del equipo, calidad de trabajo, versatilidad, vida útil, facilidades de operación, mantenimiento, características de servicio, confort, costos de reparación, mantenimiento y precio.
Características y especificaciones de diseño
Fig 2.8. Partes básicas del tractor.
25
33
Doble tracción: Trnasitibilidad Autotransporte: Pérdida de potencia Perdida por transmisión (la acción del operador es nula) Pérdida por patinaje Pérdida por rodadura Pérdida por patinaje Giro falso de la rueda de mando sobre el suelo: Solución, disminución en el avance Pérdidas por rodaduras: Menor capacidad en la barra de tiro
Solución a las pérdidas - La intervención del usuario el las pérdidas por transmisión se remite a evitar que la misma se
incremente, realizando el mantenimiento previsto en el Manual del Operador (cambio de aceite y filtros, ajustes, etc.)
- Un aumento de contrapeso disminuirán las pérdidas por patinaje, pero al mismo tiempo incrementara el esfuerzo por rodadura.
- El uso de ruedas con más superficie de apoyo y mayor diámetro disminuye las pérdidas por rodaduras.
2.8. ¿Dónde y cómo se mide la potencia de un tractor? 1.- Motor Según SAE (Sociedad Americana de Ingenieros), mide la potencia en el cigüeñal excluyendo los componentes auxiliares, capaces de consumir esfuerzos, como generador eléctrico, filtro de aire, silenciador de escape, bomba de agua y ventilador, lo cual la potencia útil estará reducida a un 15 %. Ej: 100HP SAE estarán disponible 85 HP útiles La medición a través de las normas DIN, prueba los motores con todos los accesorios de manera igual que funcionará en el vehículo o máquina. Ej: 100 CV DIN estarán disponibles 100 CV. 2.- Toma de Potencia Es la manera correcta de indicar la potencia de los tractores. Es el elemento que más valor de potencia presenta. La potencia que el tractor puede transmitir en la Toma de potencia es aproximadamente el 96% de la potencia del motor. Ej: 100 CV, en el motor 96 CV en la Toma de potencia 3.- Potencia en la Barra de Tiro Mide la capacidad de tracción (fuerza) según la velocidad de avance del tractor. Si la determinación se realiza sobre suelo agrícola, la misma depende del tipo y condición del suelo, por lo tanto el ensayo no es repetible ni comparable (el resultado es orientativo). Si la determinación se efectúa sobre una pista de hormigón (ensayos normalizados), los resultados pueden comparase, pero los valores no responden a una situación agrícola real. 2.9. Principales dimensiones Distancia entre ejes: Este término es parecido al paso pero podemos visualizar la figura para identificar la diferencia. Luz libre o despeje: Distancia entre la superficie de trabajo y la parte más baja del tractor, cuando el tractor está en condiciones de peso en orden de marcha con lastre máximo y sin conductor. Largo tota o batalla: Distancia entre dos planos perpendiculares al plano medio del tractor. Trocha: En los tractores de rueda, distancia entre los planos medios de la rueda.
26
34
Paso: Distancia entre los centros de cada superficie de apoyo de las ruedas. Ancho total: Distancia entre los planos verticales paralelos más extremos de la máquina. Altura total: Distancia entre el plano de apoyo del tractor y el plano horizontal que contiene más elevado del mismo. Sistema de regulación de la trocha - Posición relativa de las llantas: Cambiando la posición relativa entre el disco y la llanta, cuando son desmontables entre sí. - Ubicación de la maza de la rueda a través de piñón y cremallera: La maza de la rueda posee un piñón que engrana en una cremallera, que al hacer girar el piñón se desplaza el piñón, por consecuencia la rueda. - Ubicación de la maza de la rueda a través de abrazaderas: La abrazadera forma de forma de media luna, aprieta al conjunto de la rueda. Aflojando los tornillos de apriete es posible desplazar la rueda. - Por carriles helicoidales: Los carriles son guías solidarias al aro de la llanta, cruzando el ancho de la misma y extendiéndose aproximadamente un cuarto de circunferencia. El disco está fijado a la llanta por abrazaderas al carril deslizante. Cuando se requiere el cambio de trocha, se aflojan las abrazaderas de una rueda. Terminología - Lastre: Cualquier cuerpo o sustancia que se le agrega al tractor a voluntad del operador, con el propósito de producir una variación de la distribución del peso, de la estabilidad o del esfuerzo de tracción del mismo. - Peso en vacío: Peso estático del tractor, teniendo todos los órganos normales, pero sin combustible, lubricantes, agua, lastre ni conductor. - Peso en orden de marcha: Peso estático del tractor teniendo incorporado todos los órganos normales, totalmente abastecido de combustible, lubricantes, agua, sin lastre y sin conductor. - Peso en orden de marcha, con lastre máximo y sin conductor - Amplitud de viraje: Diámetro de la circunferencia que describe el punto del tractor más alejado del eje de rotación, cando el tractor sin lastre es mantenido a una velocidad baja (Km/h) - Diámetro de viraje: Es la amplitud que tiene el tractor para la realización de un cruce.
27
35
III. POTENCIA
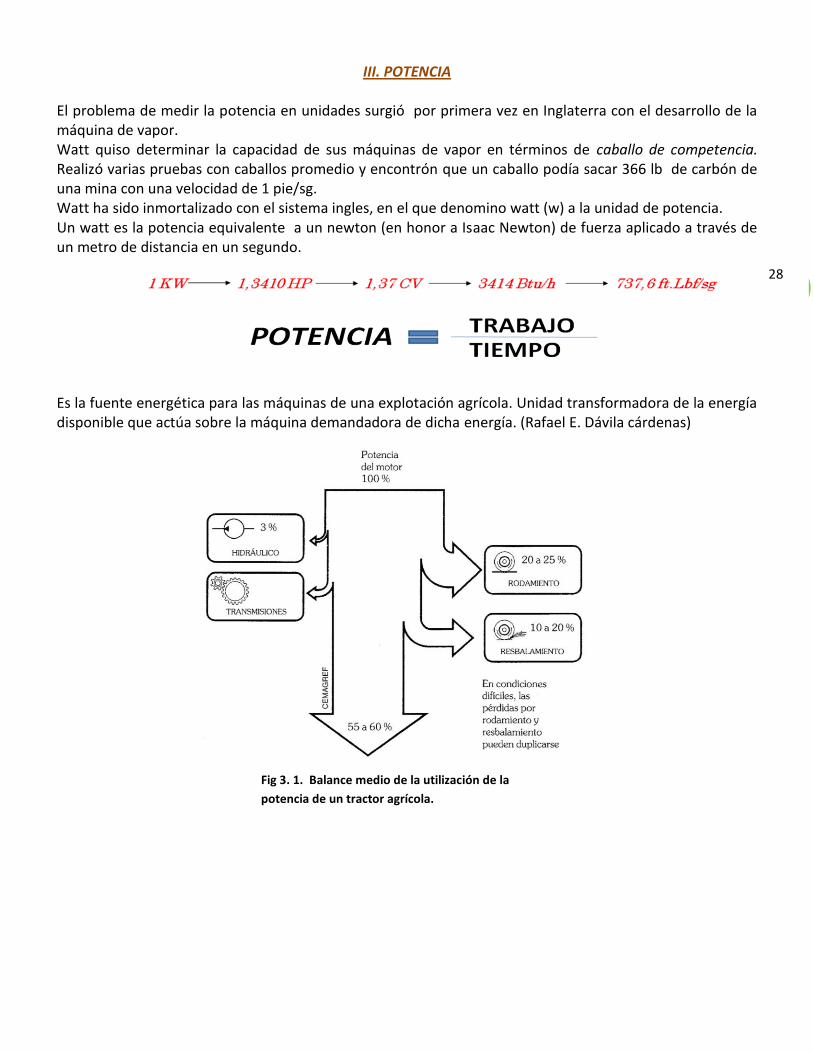
El problema de medir la potencia en unidades surgió por primera vez en Inglaterra con el desarrollo de la máquina de vapor. Watt quiso determinar la capacidad de sus máquinas de vapor en términos de caballo de competencia. Realizó varias pruebas con caballos promedio y encontrón que un caballo podía sacar 366 lb de carbón de una mina con una velocidad de 1 pie/sg. Watt ha sido inmortalizado con el sistema ingles, en el que denomino watt (w) a la unidad de potencia. Un watt es la potencia equivalente a un newton (en honor a Isaac Newton) de fuerza aplicado a través de un metro de distancia en un segundo. Es la fuente energética para las máquinas de una explotación agrícola. Unidad transformadora de la energía disponible que actúa sobre la máquina demandadora de dicha energía. (Rafael E. Dávila cárdenas)
Fig 3. 1. Balance medio de la utilización de la
potencia de un tractor agrícola.
28

36
¿CUÁL ES EL ELEMENTO PRINCIPAL DEL TRACTOR? EL MOTOR 3.1. Potencia en los diversos sistemas Potencia en la barra de tiro (PBT) PBT = F.V/c Potencia en la toma de fuerza (PTF) PTF = 2.π.F.R.N/c = 2.π.T.N/c Potencia hidráulica (Phi) Phi = p.Q/c Potencia eléctrica (PE) PE = I.E
Fig 3.3. Relaciones típicas de potencia en
tractores sometidos a distintas cargas.
Fig 3.2. Rendimiento de la potencia de un
tractor sobre concreto.
PBT: Potencia en la barra de tiro Kw (Hp). F: Fuerza medida en Kn (lB) V: Velocidad hacia adelante Km/hr (MPH) C: Constante 3.6 (375)
PTF: Potencia en toma de fuerza Kw (Hp) F: Fuerza tangencial en Kn (lB) R: Radio de la fuerza de rotación m (pies) N: Revoluciones por minuto (rpm) T: Par motor N.m (lb.pies) C: Constante 60 (33000)
Phi: Potencia hidráulica Kw (Hp) p: Presión manométrica Kpa (psi) Q: Velocidad de flujo Lt/sg (gal/min) N: Revoluciones por minuto (rpm) C: Constante 1000 (1714)
PE: Potencia eléctrica W I: Velocidad de flujo de los electrones A E: Presión eléctrica V
29
37
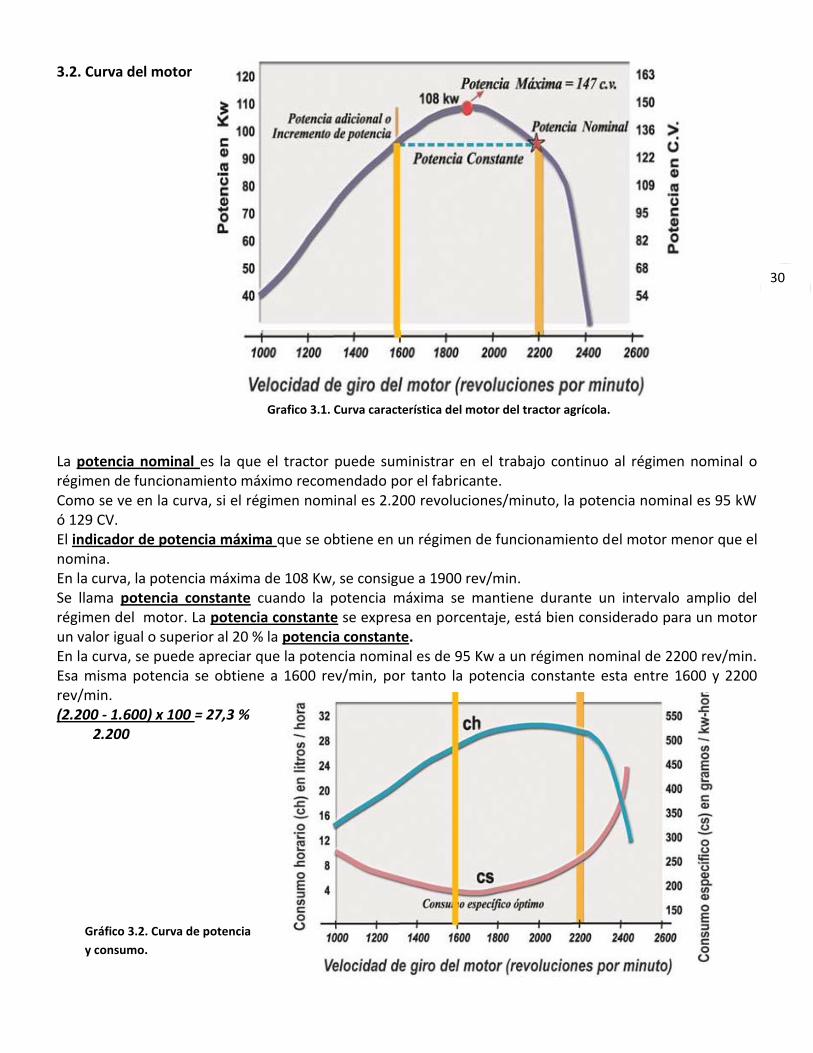
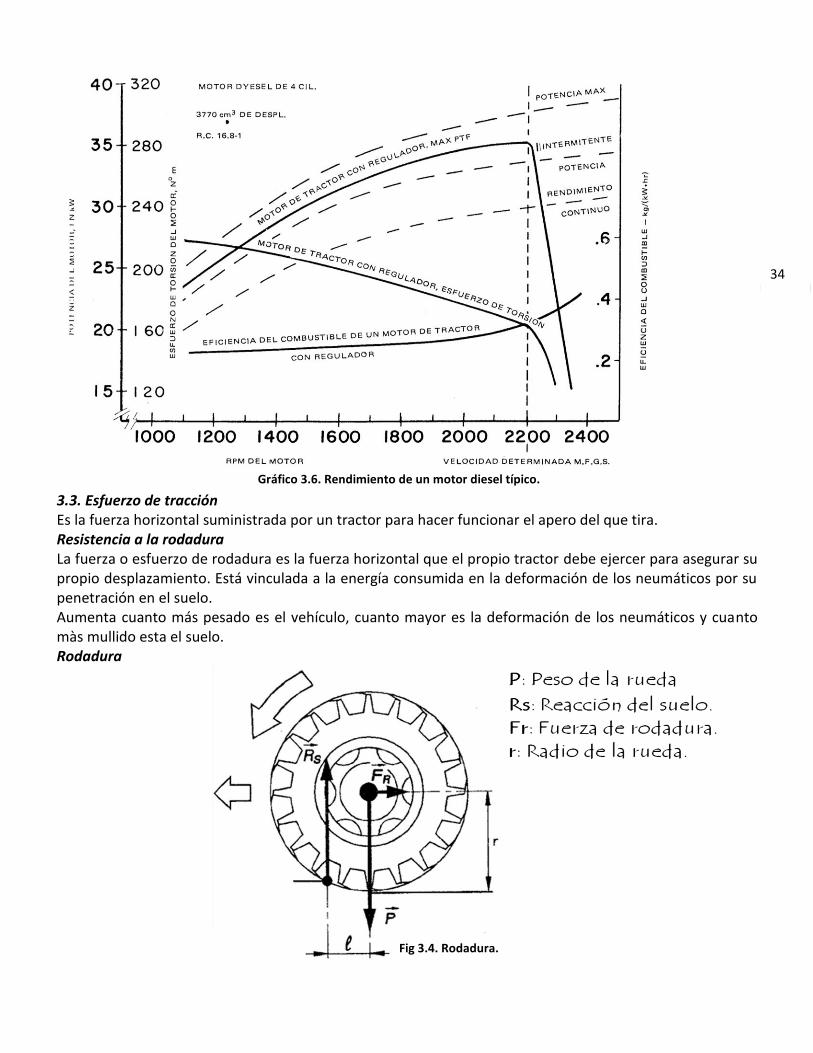
3.2. Curva del motor La potencia nominal es la que el tractor puede suministrar en el trabajo continuo al régimen nominal o régimen de funcionamiento máximo recomendado por el fabricante. Como se ve en la curva, si el régimen nominal es 2.200 revoluciones/minuto, la potencia nominal es 95 kW ó 129 CV. El indicador de potencia máxima que se obtiene en un régimen de funcionamiento del motor menor que el nomina. En la curva, la potencia máxima de 108 Kw, se consigue a 1900 rev/min. Se llama potencia constante cuando la potencia máxima se mantiene durante un intervalo amplio del régimen del motor. La potencia constante se expresa en porcentaje, está bien considerado para un motor un valor igual o superior al 20 % la potencia constante. En la curva, se puede apreciar que la potencia nominal es de 95 Kw a un régimen nominal de 2200 rev/min. Esa misma potencia se obtiene a 1600 rev/min, por tanto la potencia constante esta entre 1600 y 2200 rev/min. (2.200 - 1.600) x 100 = 27,3 % 2.200
Grafico 3.1. Curva característica del motor del tractor agrícola.
Gráfico 3.2. Curva de potencia
y consumo.
30
38
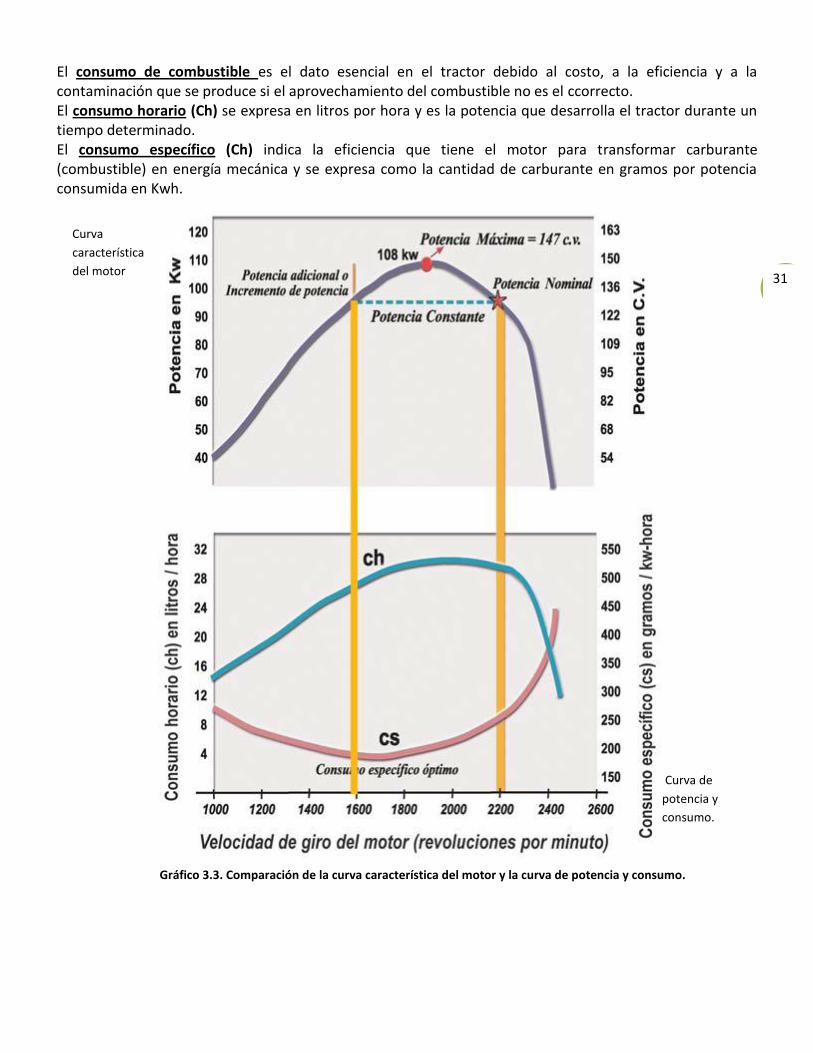
El consumo de combustible es el dato esencial en el tractor debido al costo, a la eficiencia y a la contaminación que se produce si el aprovechamiento del combustible no es el ccorrecto. El consumo horario (Ch) se expresa en litros por hora y es la potencia que desarrolla el tractor durante un tiempo determinado. El consumo específico (Ch) indica la eficiencia que tiene el motor para transformar carburante (combustible) en energía mecánica y se expresa como la cantidad de carburante en gramos por potencia consumida en Kwh.
Curva de
potencia y
consumo.
Curva
característica
del motor
Gráfico 3.3. Comparación de la curva característica del motor y la curva de potencia y consumo.
31
39
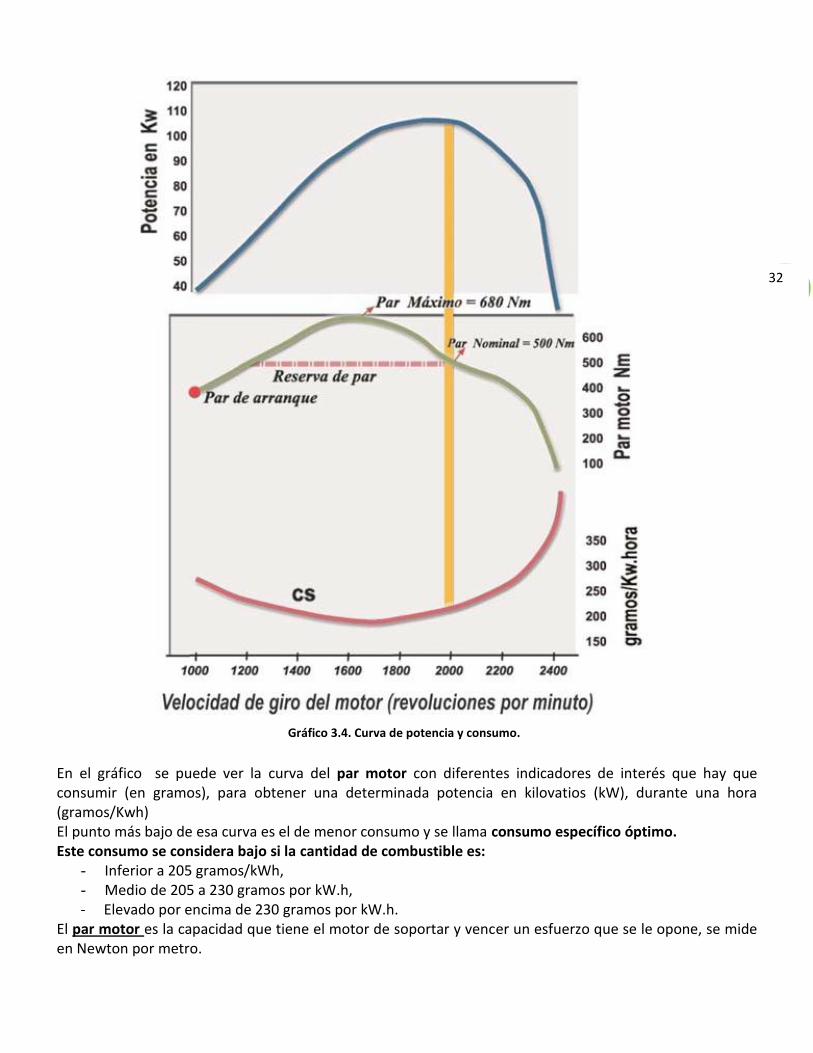
En el gráfico se puede ver la curva del par motor con diferentes indicadores de interés que hay que consumir (en gramos), para obtener una determinada potencia en kilovatios (kW), durante una hora (gramos/Kwh) El punto más bajo de esa curva es el de menor consumo y se llama consumo específico óptimo. Este consumo se considera bajo si la cantidad de combustible es:
- Inferior a 205 gramos/kWh, - Medio de 205 a 230 gramos por kW.h, - Elevado por encima de 230 gramos por kW.h.
El par motor es la capacidad que tiene el motor de soportar y vencer un esfuerzo que se le opone, se mide en Newton por metro.
Gráfico 3.4. Curva de potencia y consumo.
32
40
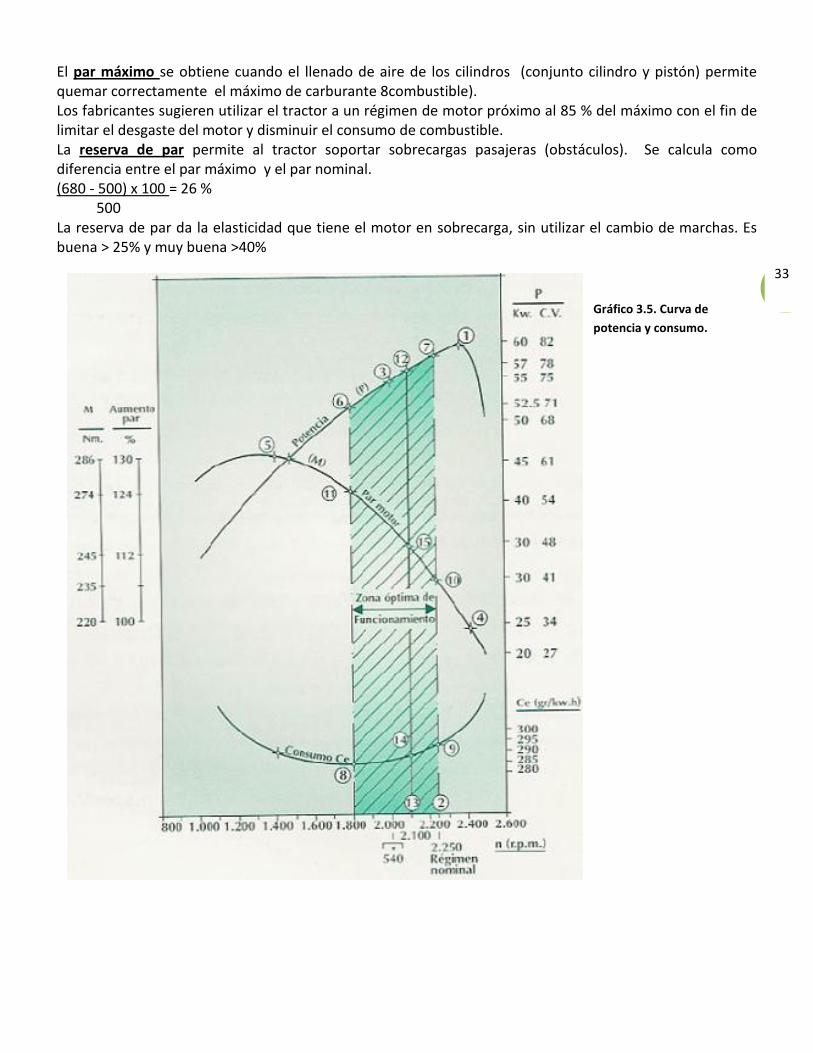
El par máximo se obtiene cuando el llenado de aire de los cilindros (conjunto cilindro y pistón) permite quemar correctamente el máximo de carburante 8combustible). Los fabricantes sugieren utilizar el tractor a un régimen de motor próximo al 85 % del máximo con el fin de limitar el desgaste del motor y disminuir el consumo de combustible. La reserva de par permite al tractor soportar sobrecargas pasajeras (obstáculos). Se calcula como diferencia entre el par máximo y el par nominal. (680 - 500) x 100 = 26 % 500 La reserva de par da la elasticidad que tiene el motor en sobrecarga, sin utilizar el cambio de marchas. Es buena > 25% y muy buena >40%
Gráfico 3.5. Curva de
potencia y consumo.
33
41
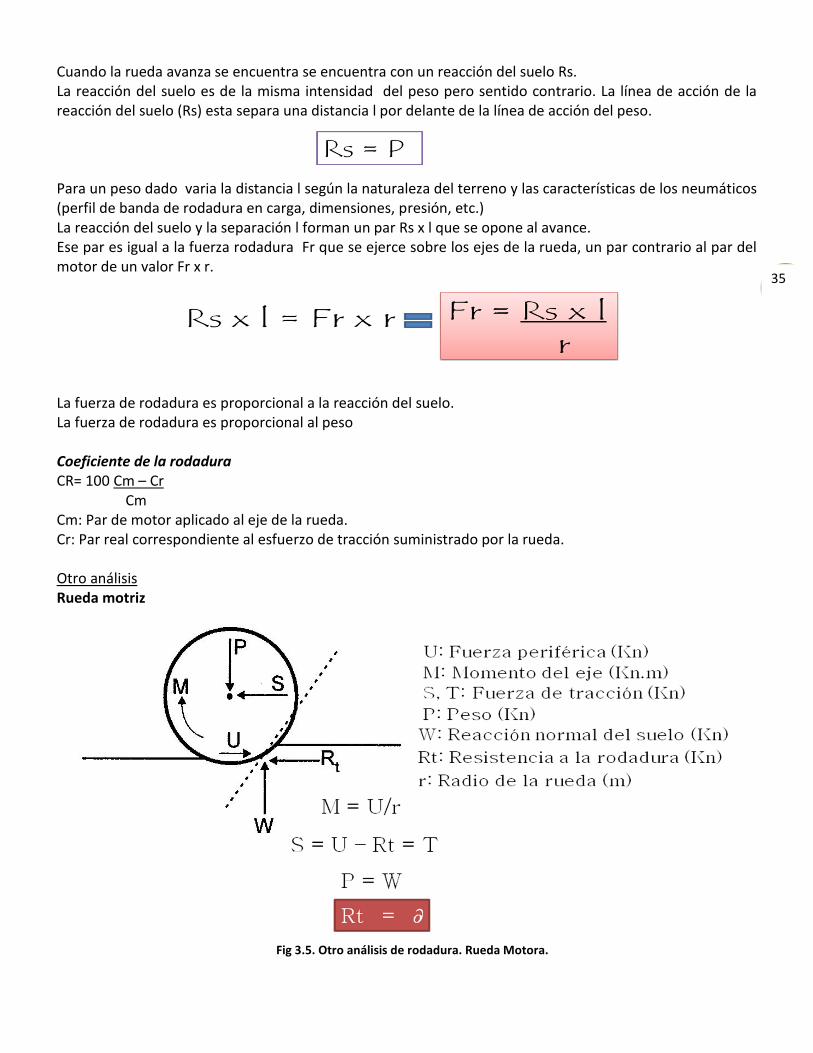
3.3. Esfuerzo de tracción Es la fuerza horizontal suministrada por un tractor para hacer funcionar el apero del que tira. Resistencia a la rodadura La fuerza o esfuerzo de rodadura es la fuerza horizontal que el propio tractor debe ejercer para asegurar su propio desplazamiento. Está vinculada a la energía consumida en la deformación de los neumáticos por su penetración en el suelo. Aumenta cuanto más pesado es el vehículo, cuanto mayor es la deformación de los neumáticos y cuanto màs mullido esta el suelo. Rodadura
Gráfico 3.6. Rendimiento de un motor diesel típico.
Fig 3.4. Rodadura.
34
42
Cuando la rueda avanza se encuentra se encuentra con un reacción del suelo Rs. La reacción del suelo es de la misma intensidad del peso pero sentido contrario. La línea de acción de la reacción del suelo (Rs) esta separa una distancia l por delante de la línea de acción del peso. Para un peso dado varia la distancia l según la naturaleza del terreno y las características de los neumáticos (perfil de banda de rodadura en carga, dimensiones, presión, etc.) La reacción del suelo y la separación l forman un par Rs x l que se opone al avance. Ese par es igual a la fuerza rodadura Fr que se ejerce sobre los ejes de la rueda, un par contrario al par del motor de un valor Fr x r. La fuerza de rodadura es proporcional a la reacción del suelo. La fuerza de rodadura es proporcional al peso Coeficiente de la rodadura CR= 100 Cm – Cr Cm Cm: Par de motor aplicado al eje de la rueda. Cr: Par real correspondiente al esfuerzo de tracción suministrado por la rueda. Otro análisis Rueda motriz Fig 3.5. Otro análisis de rodadura. Rueda Motora.
35
43
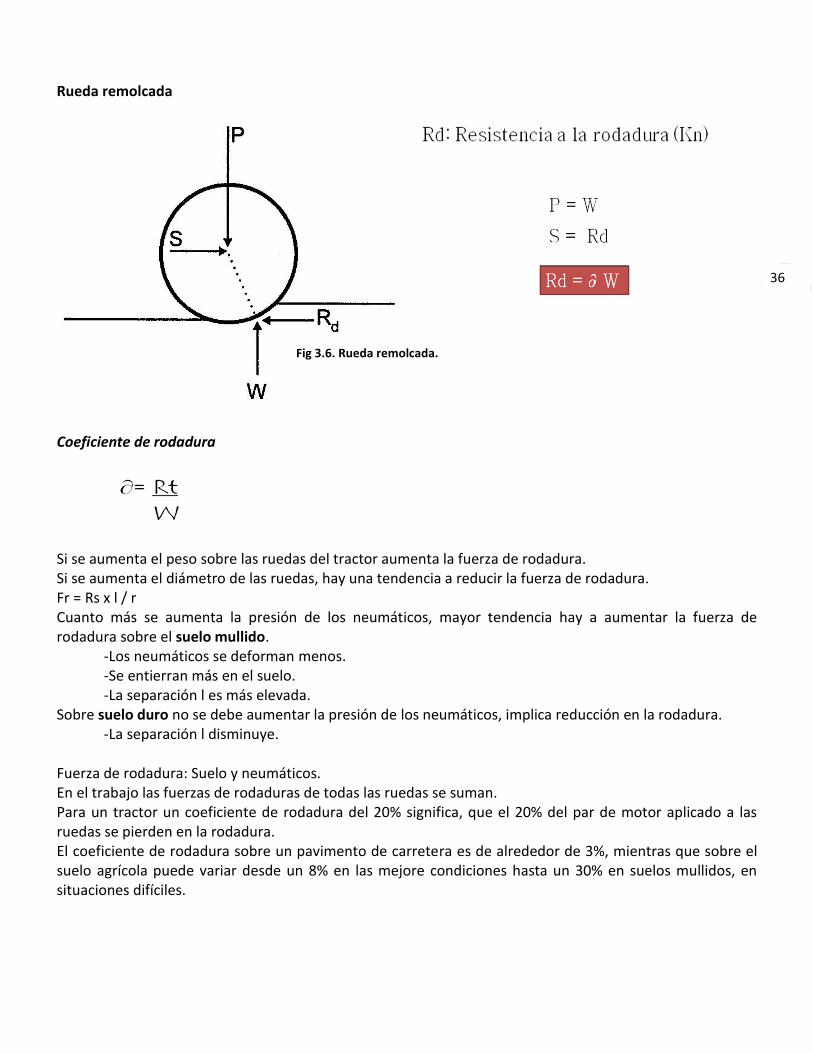
Rueda remolcada
Coeficiente de rodadura Si se aumenta el peso sobre las ruedas del tractor aumenta la fuerza de rodadura. Si se aumenta el diámetro de las ruedas, hay una tendencia a reducir la fuerza de rodadura. Fr = Rs x l / r Cuanto más se aumenta la presión de los neumáticos, mayor tendencia hay a aumentar la fuerza de rodadura sobre el suelo mullido.
-Los neumáticos se deforman menos. -Se entierran más en el suelo. -La separación l es más elevada.
Sobre suelo duro no se debe aumentar la presión de los neumáticos, implica reducción en la rodadura. -La separación l disminuye.
Fuerza de rodadura: Suelo y neumáticos. En el trabajo las fuerzas de rodaduras de todas las ruedas se suman. Para un tractor un coeficiente de rodadura del 20% significa, que el 20% del par de motor aplicado a las ruedas se pierden en la rodadura. El coeficiente de rodadura sobre un pavimento de carretera es de alrededor de 3%, mientras que sobre el suelo agrícola puede variar desde un 8% en las mejore condiciones hasta un 30% en suelos mullidos, en situaciones difíciles.
Fig 3.6. Rueda remolcada.
36
44
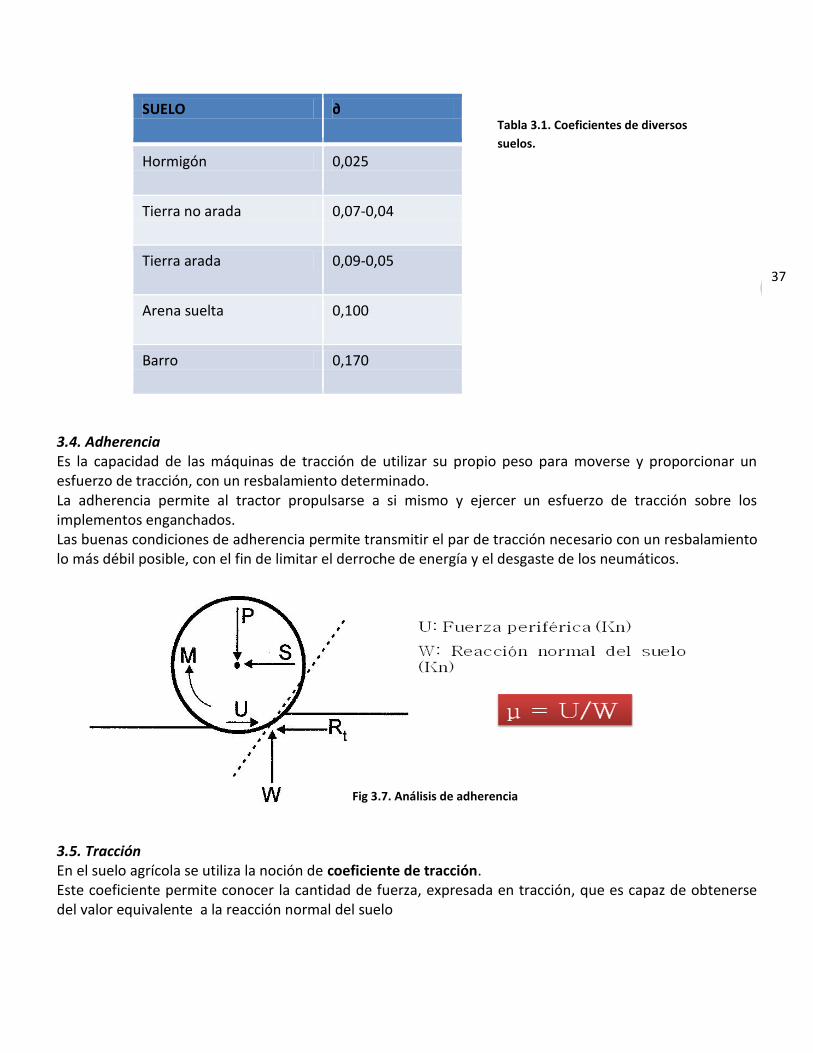
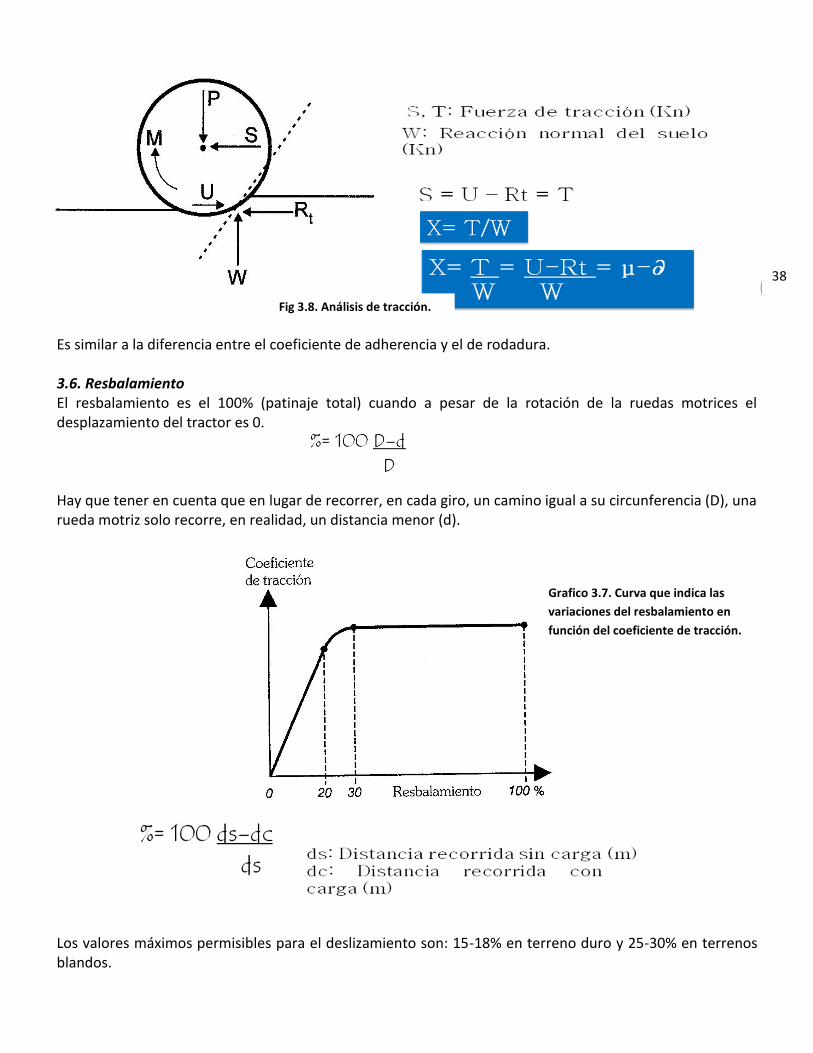
3.4. Adherencia Es la capacidad de las máquinas de tracción de utilizar su propio peso para moverse y proporcionar un esfuerzo de tracción, con un resbalamiento determinado. La adherencia permite al tractor propulsarse a si mismo y ejercer un esfuerzo de tracción sobre los implementos enganchados. Las buenas condiciones de adherencia permite transmitir el par de tracción necesario con un resbalamiento lo más débil posible, con el fin de limitar el derroche de energía y el desgaste de los neumáticos.
3.5. Tracción En el suelo agrícola se utiliza la noción de coeficiente de tracción. Este coeficiente permite conocer la cantidad de fuerza, expresada en tracción, que es capaz de obtenerse del valor equivalente a la reacción normal del suelo
SUELO ∂
Hormigón 0,025
Tierra no arada 0,07-0,04
Tierra arada 0,09-0,05
Arena suelta 0,100
Barro 0,170
Fig 3.7. Análisis de adherencia
Tabla 3.1. Coeficientes de diversos
suelos.
37
45
Es similar a la diferencia entre el coeficiente de adherencia y el de rodadura. 3.6. Resbalamiento El resbalamiento es el 100% (patinaje total) cuando a pesar de la rotación de la ruedas motrices el desplazamiento del tractor es 0. Hay que tener en cuenta que en lugar de recorrer, en cada giro, un camino igual a su circunferencia (D), una rueda motriz solo recorre, en realidad, un distancia menor (d).
Los valores máximos permisibles para el deslizamiento son: 15-18% en terreno duro y 25-30% en terrenos blandos.
Grafico 3.7. Curva que indica las
variaciones del resbalamiento en
función del coeficiente de tracción.
Fig 3.8. Análisis de tracción.
38
46
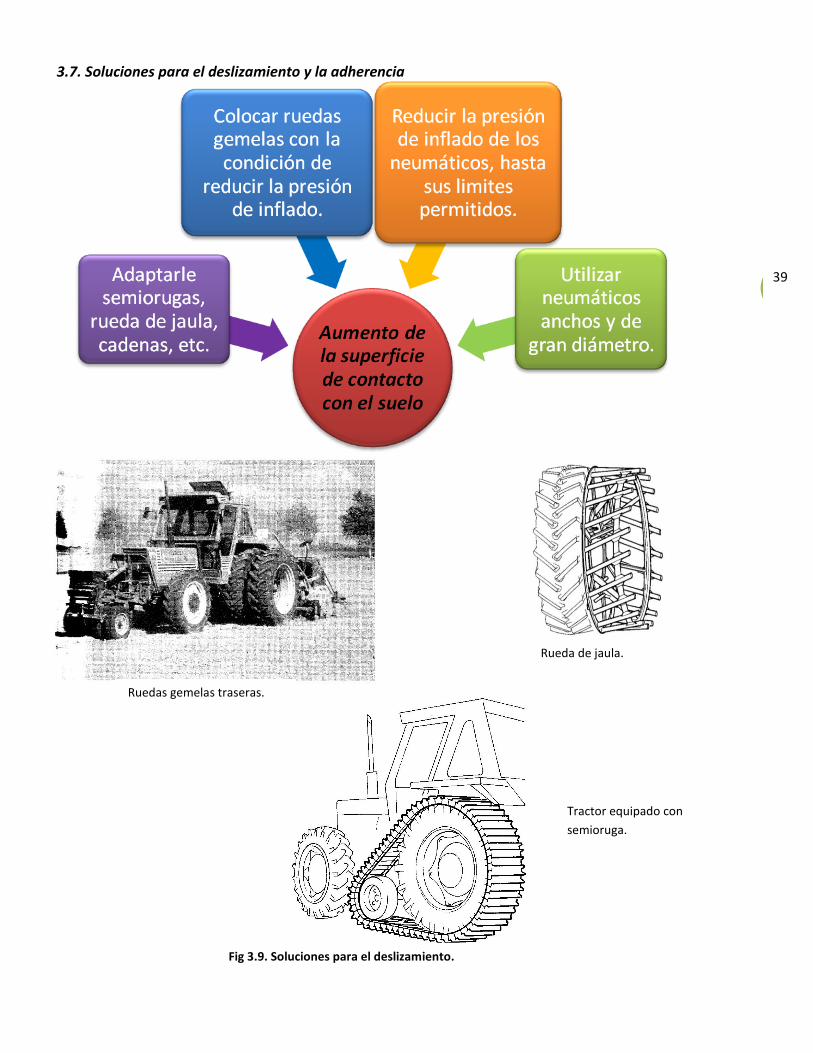
3.7. Soluciones para el deslizamiento y la adherencia
Rueda de jaula.
Tractor equipado con
semioruga.
Ruedas gemelas traseras.
Fig 3.9. Soluciones para el deslizamiento.
39
47
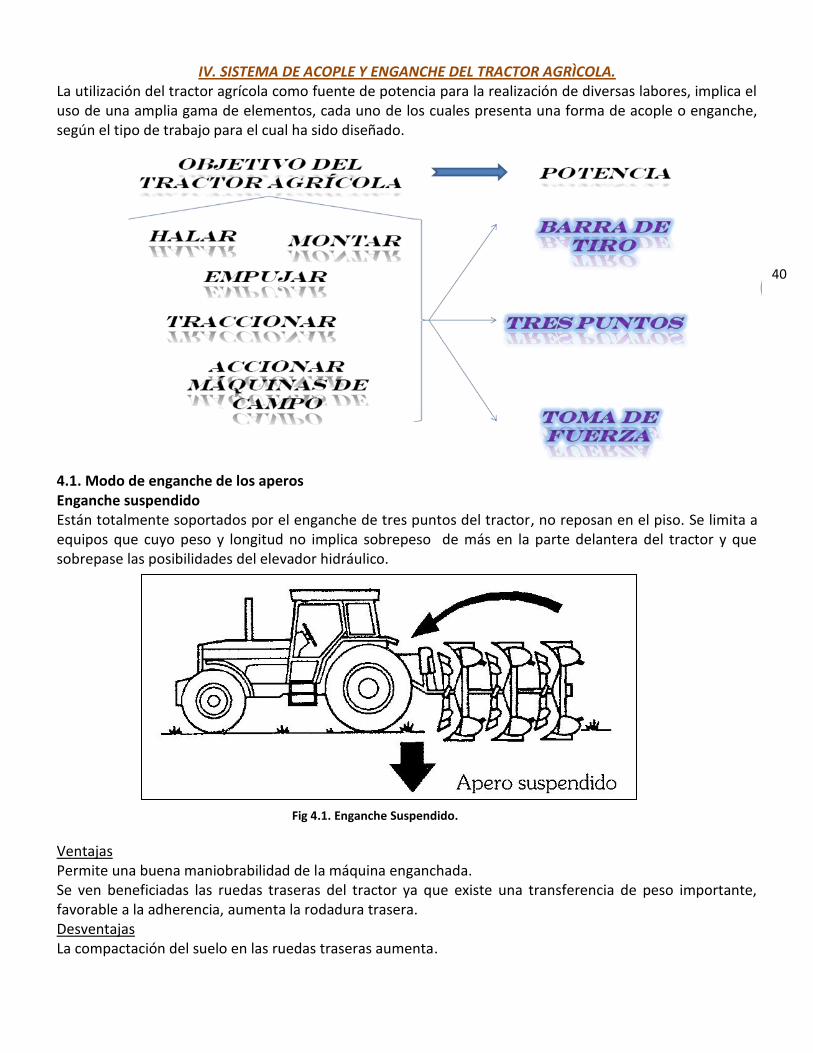
IV. SISTEMA DE ACOPLE Y ENGANCHE DEL TRACTOR AGRÌCOLA. La utilización del tractor agrícola como fuente de potencia para la realización de diversas labores, implica el uso de una amplia gama de elementos, cada uno de los cuales presenta una forma de acople o enganche, según el tipo de trabajo para el cual ha sido diseñado. 4.1. Modo de enganche de los aperos Enganche suspendido Están totalmente soportados por el enganche de tres puntos del tractor, no reposan en el piso. Se limita a equipos que cuyo peso y longitud no implica sobrepeso de más en la parte delantera del tractor y que sobrepase las posibilidades del elevador hidráulico. Ventajas Permite una buena maniobrabilidad de la máquina enganchada. Se ven beneficiadas las ruedas traseras del tractor ya que existe una transferencia de peso importante, favorable a la adherencia, aumenta la rodadura trasera. Desventajas La compactación del suelo en las ruedas traseras aumenta.
Fig 4.1. Enganche Suspendido.
40
48
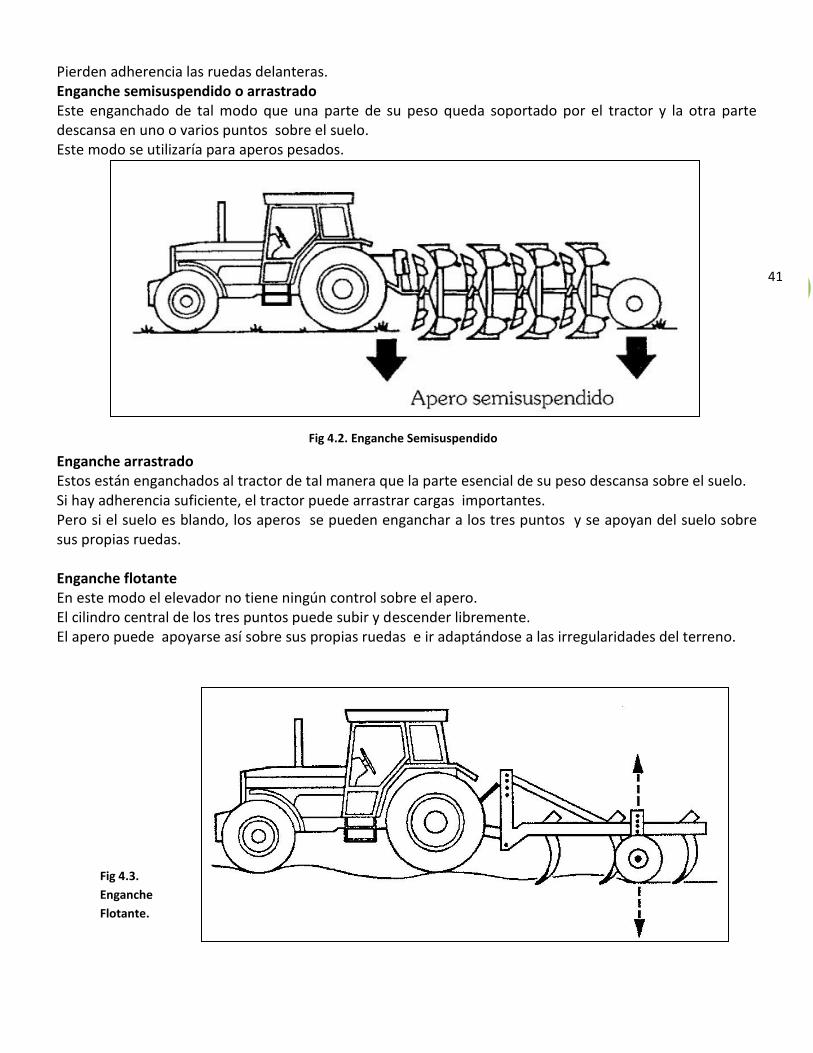
Pierden adherencia las ruedas delanteras. Enganche semisuspendido o arrastrado Este enganchado de tal modo que una parte de su peso queda soportado por el tractor y la otra parte descansa en uno o varios puntos sobre el suelo. Este modo se utilizaría para aperos pesados. Enganche arrastrado Estos están enganchados al tractor de tal manera que la parte esencial de su peso descansa sobre el suelo. Si hay adherencia suficiente, el tractor puede arrastrar cargas importantes. Pero si el suelo es blando, los aperos se pueden enganchar a los tres puntos y se apoyan del suelo sobre sus propias ruedas. Enganche flotante En este modo el elevador no tiene ningún control sobre el apero. El cilindro central de los tres puntos puede subir y descender libremente. El apero puede apoyarse así sobre sus propias ruedas e ir adaptándose a las irregularidades del terreno.
Fig 4.2. Enganche Semisuspendido
Fig 4.3.
Enganche
Flotante.
41

49
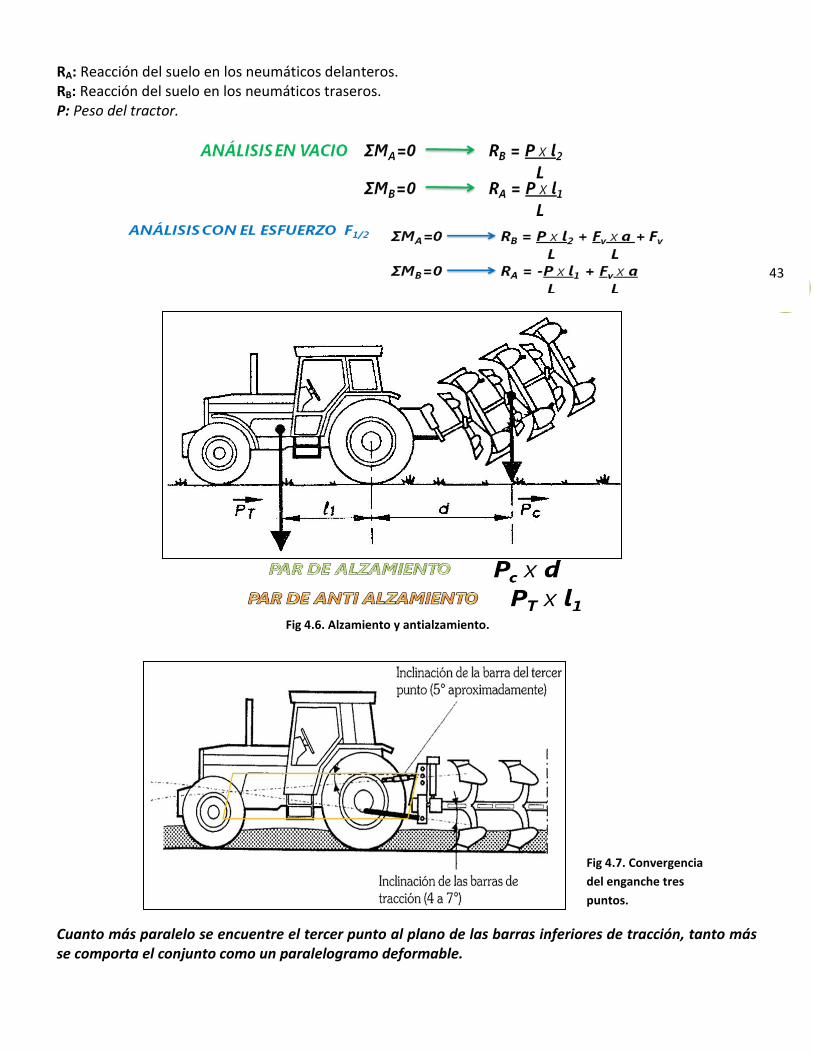
4.2. Comportamiento tractor-apero Ic, Il: Punto de convergencia de acción de las fuerzas de los brazos de enganche. F: Centro de resistencia del apero W0: Es la resultante de las fuerzas que se aplican sobre el arado durante el trabajo. Está compuesta por: Peso del arado, reacción del suelo sobre la reja, sobre la vertedera y sobre la contradental. F2/1: Fuerza de tracción del tractor al apero. T: Fuerza de talonamiento. Si F2/1 y W0 dan una resultante no nula, aparece una fuerza de talonamiento que se aplica bajo el talón del arado y bajo la rueda de control de profundidad. W0 es una característica del apero en un trabajo determinado. F1/2: Fuerza de tracción del apero al tractor. F1/2 = F2/1. La línea de acción pasa por el punto de convergencia de los brazos de enganche.
Fig 4.4. Comportamiento Tractor-Apero
Fig 4.5. Análisis estático
de Tractor-Apero.
42
50
RA: Reacción del suelo en los neumáticos delanteros. RB: Reacción del suelo en los neumáticos traseros. P: Peso del tractor.
Cuanto más paralelo se encuentre el tercer punto al plano de las barras inferiores de tracción, tanto más se comporta el conjunto como un paralelogramo deformable.
Fig 4.6. Alzamiento y antialzamiento.
Fig 4.7. Convergencia
del enganche tres
puntos.
43
51
4.3. EJERCICIOS
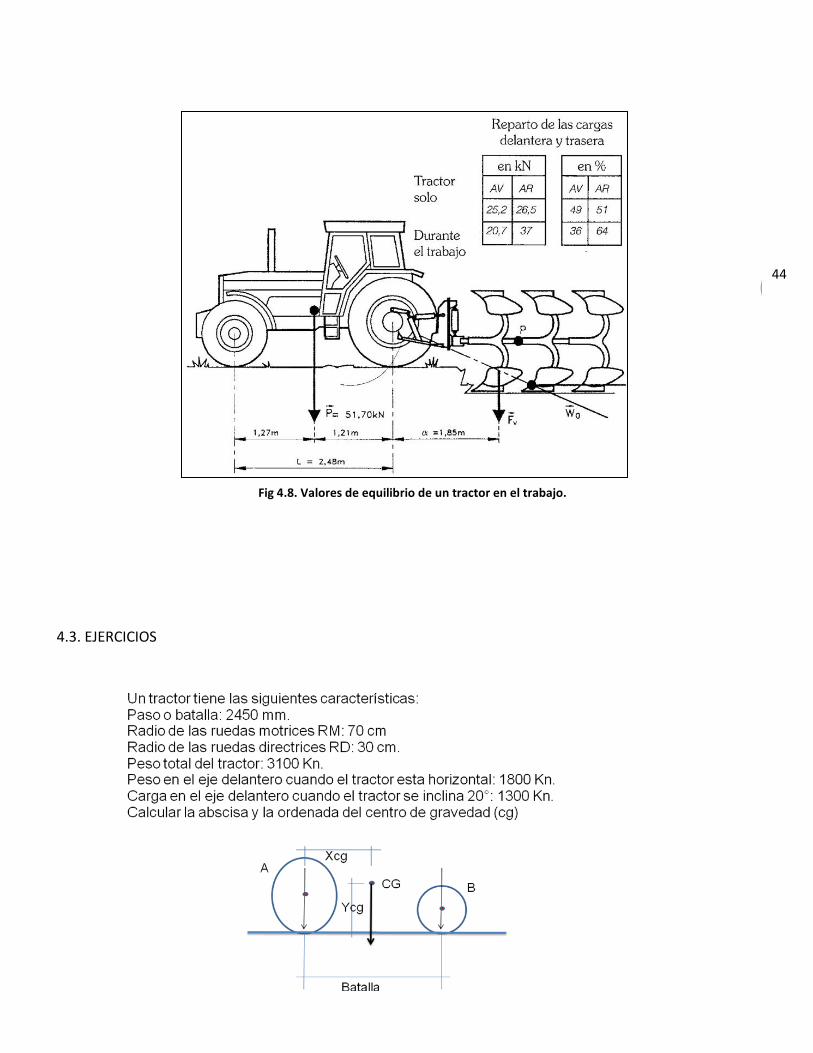
Fig 4.8. Valores de equilibrio de un tractor en el trabajo.
44
52
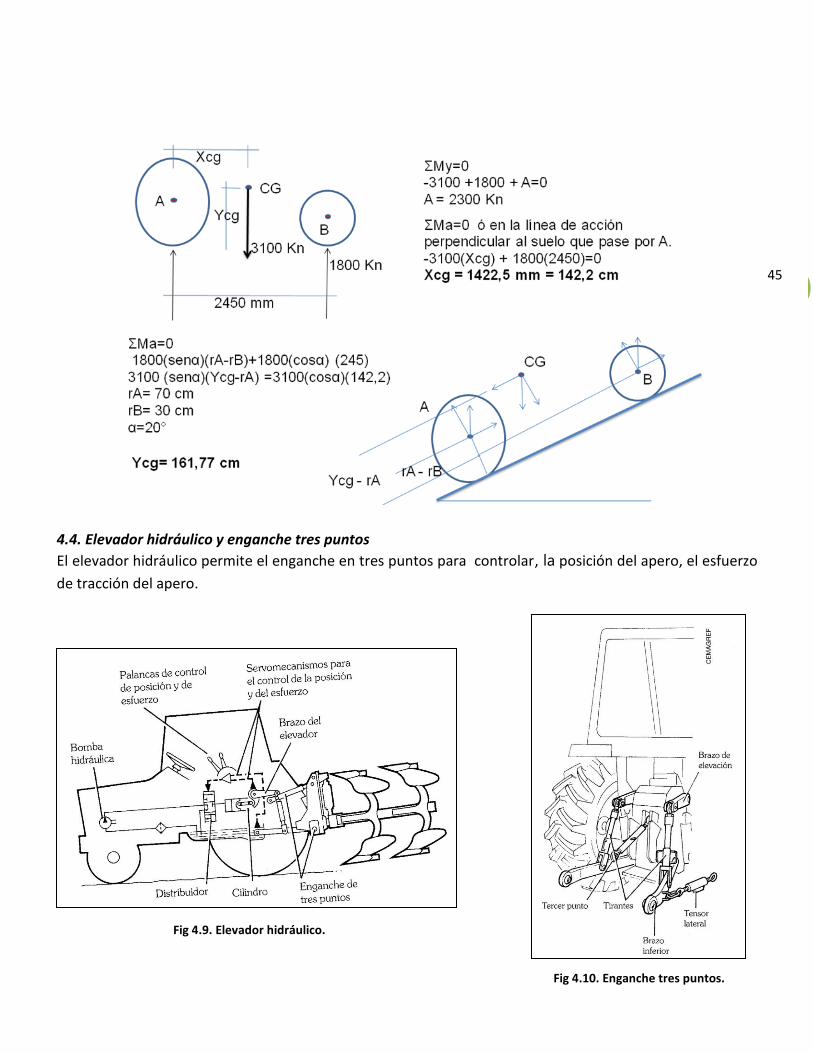
4.4. Elevador hidráulico y enganche tres puntos
El elevador hidráulico permite el enganche en tres puntos para controlar, la posición del apero, el esfuerzo
de tracción del apero.
Fig 4.9. Elevador hidráulico.
Fig 4.10. Enganche tres puntos.
45
53
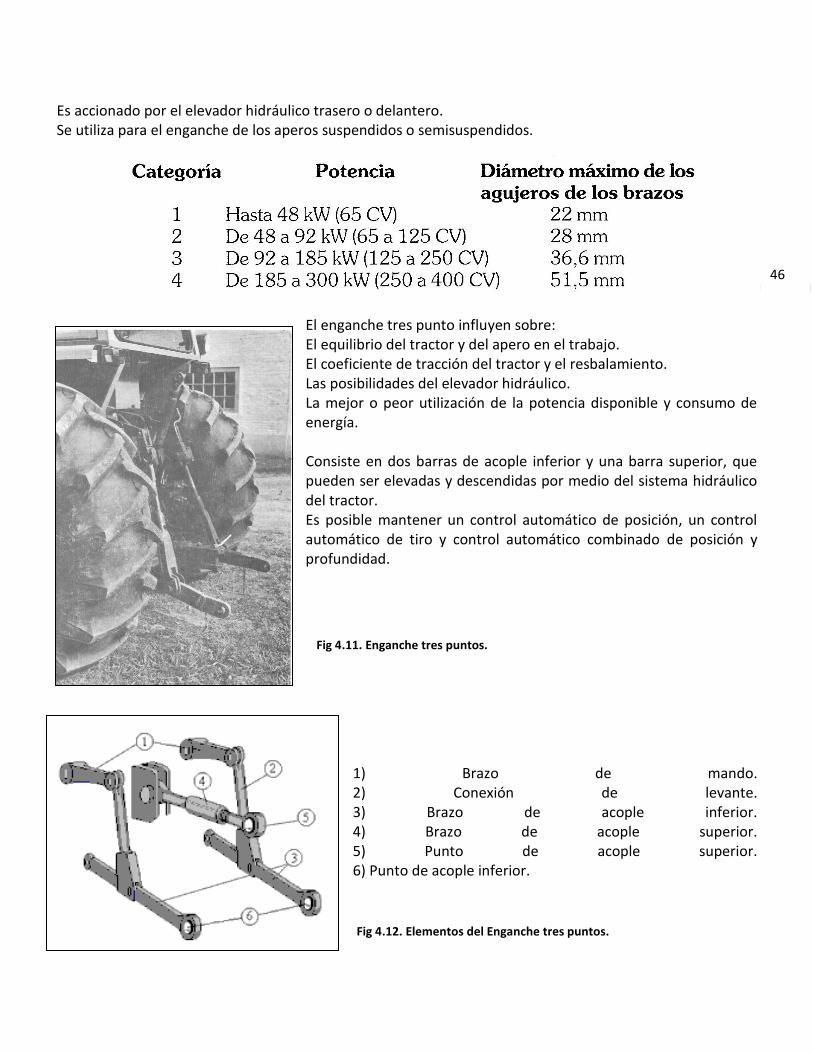
Es accionado por el elevador hidráulico trasero o delantero. Se utiliza para el enganche de los aperos suspendidos o semisuspendidos.
El enganche tres punto influyen sobre: El equilibrio del tractor y del apero en el trabajo. El coeficiente de tracción del tractor y el resbalamiento. Las posibilidades del elevador hidráulico. La mejor o peor utilización de la potencia disponible y consumo de energía. Consiste en dos barras de acople inferior y una barra superior, que pueden ser elevadas y descendidas por medio del sistema hidráulico del tractor. Es posible mantener un control automático de posición, un control automático de tiro y control automático combinado de posición y profundidad.
1) Brazo de mando. 2) Conexión de levante. 3) Brazo de acople inferior. 4) Brazo de acople superior. 5) Punto de acople superior. 6) Punto de acople inferior.
Fig 4.11. Enganche tres puntos.
Fig 4.12. Elementos del Enganche tres puntos.
46
54
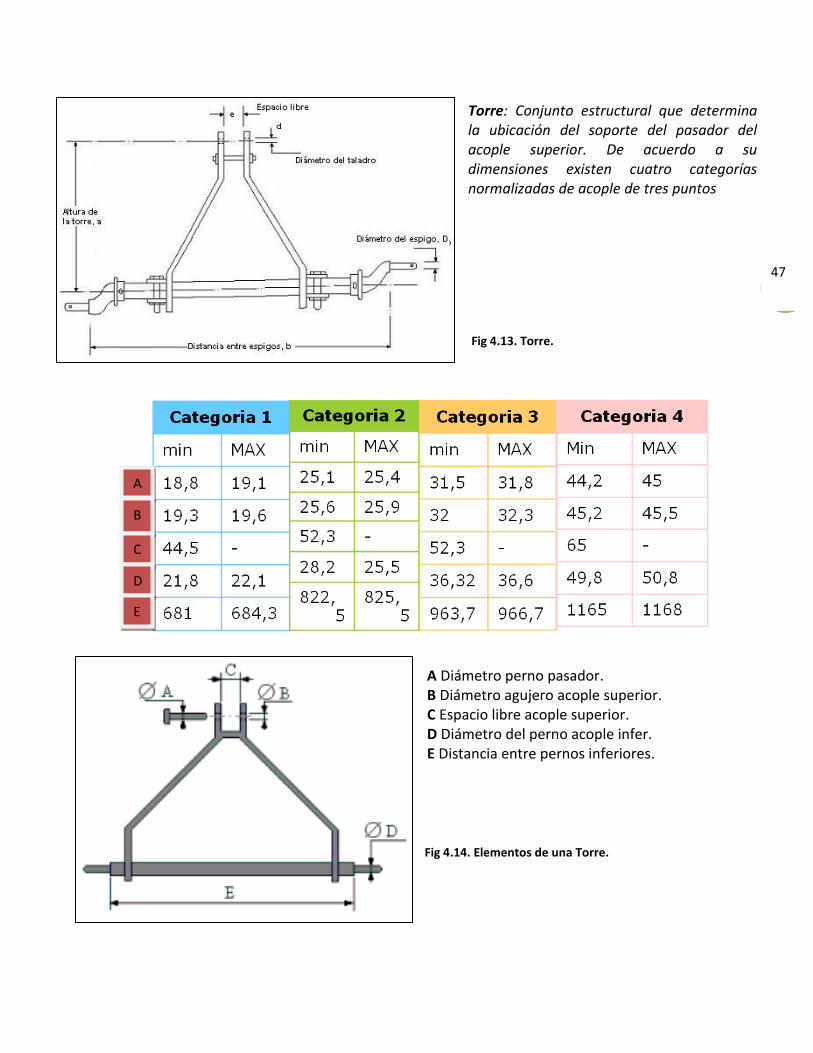
Torre: Conjunto estructural que determina la ubicación del soporte del pasador del acople superior. De acuerdo a su dimensiones existen cuatro categorías normalizadas de acople de tres puntos
A Diámetro perno pasador. B Diámetro agujero acople superior. C Espacio libre acople superior. D Diámetro del perno acople infer. E Distancia entre pernos inferiores.
A
B
C
D
E
Fig 4.13. Torre.
Fig 4.14. Elementos de una Torre.
47
55
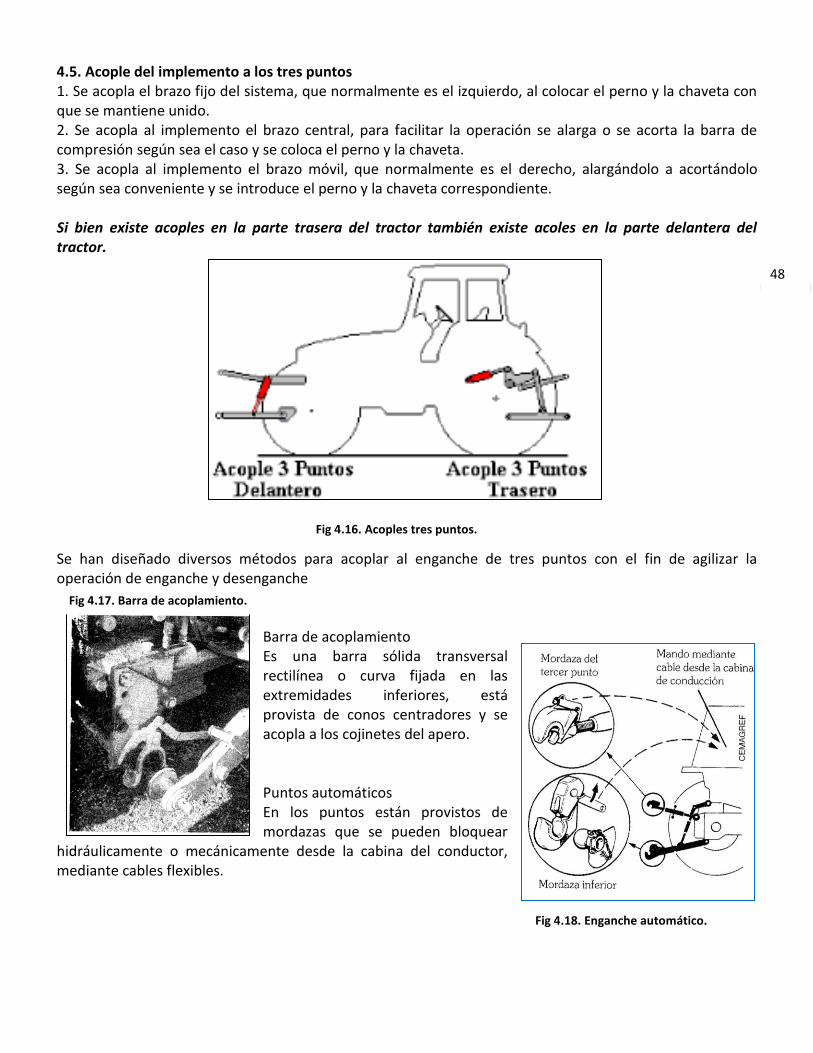
4.5. Acople del implemento a los tres puntos 1. Se acopla el brazo fijo del sistema, que normalmente es el izquierdo, al colocar el perno y la chaveta con que se mantiene unido. 2. Se acopla al implemento el brazo central, para facilitar la operación se alarga o se acorta la barra de compresión según sea el caso y se coloca el perno y la chaveta. 3. Se acopla al implemento el brazo móvil, que normalmente es el derecho, alargándolo a acortándolo según sea conveniente y se introduce el perno y la chaveta correspondiente. Si bien existe acoples en la parte trasera del tractor también existe acoles en la parte delantera del tractor. Se han diseñado diversos métodos para acoplar al enganche de tres puntos con el fin de agilizar la operación de enganche y desenganche
Barra de acoplamiento Es una barra sólida transversal rectilínea o curva fijada en las extremidades inferiores, está provista de conos centradores y se acopla a los cojinetes del apero. Puntos automáticos En los puntos están provistos de mordazas que se pueden bloquear
hidráulicamente o mecánicamente desde la cabina del conductor, mediante cables flexibles.
Fig 4.16. Acoples tres puntos.
Fig 4.17. Barra de acoplamiento.
Fig 4.18. Enganche automático.
48
56
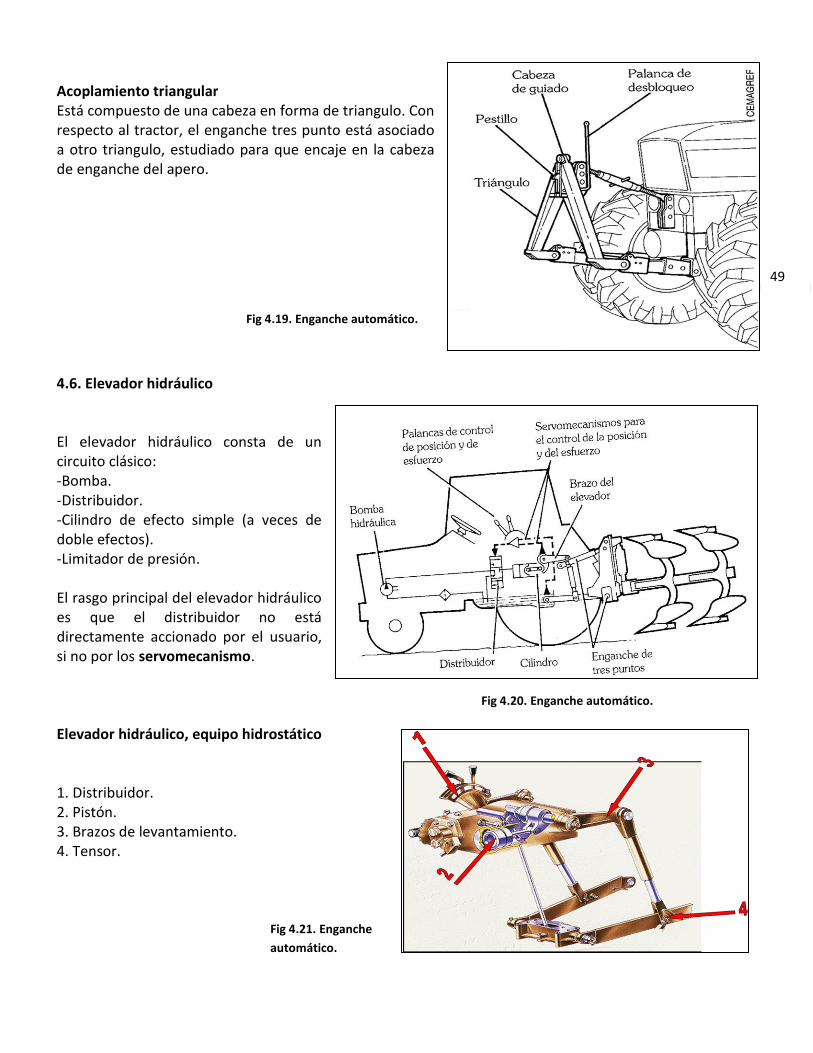
Acoplamiento triangular Está compuesto de una cabeza en forma de triangulo. Con respecto al tractor, el enganche tres punto está asociado a otro triangulo, estudiado para que encaje en la cabeza de enganche del apero. 4.6. Elevador hidráulico El elevador hidráulico consta de un circuito clásico: -Bomba. -Distribuidor. -Cilindro de efecto simple (a veces de doble efectos). -Limitador de presión. El rasgo principal del elevador hidráulico es que el distribuidor no está directamente accionado por el usuario, si no por los servomecanismo. Elevador hidráulico, equipo hidrostático 1. Distribuidor. 2. Pistón. 3. Brazos de levantamiento. 4. Tensor.
Fig 4.19. Enganche automático.
Fig 4.20. Enganche automático.
Fig 4.21. Enganche
automático.
49
57
4.7. Equipo hidrostático Consta de:
• Un depósito de fluido que normalmente es el mismo de la caja de velocidad, y sirve depósito del fluido del elevador.
• Una bomba hidrostática, que aspira el fluido del càrter a través de un filtro y lo impulsa a las tuberías.
• Una válvula limitadora de presión que regula la presión máxima del fluido en el circuito. • Un distribuidor manual del tipo ¾ (tres posiciones y cuatro vías. • Un regulador de caudal para controlar la velocidad del descenso. • Un pistón de simple efecto de gran diámetro que se apoya en el bulòn de empuje. • Una biela solidaria a los brazos del elevador que recibe la acción del vástago del pistón en el bulòn
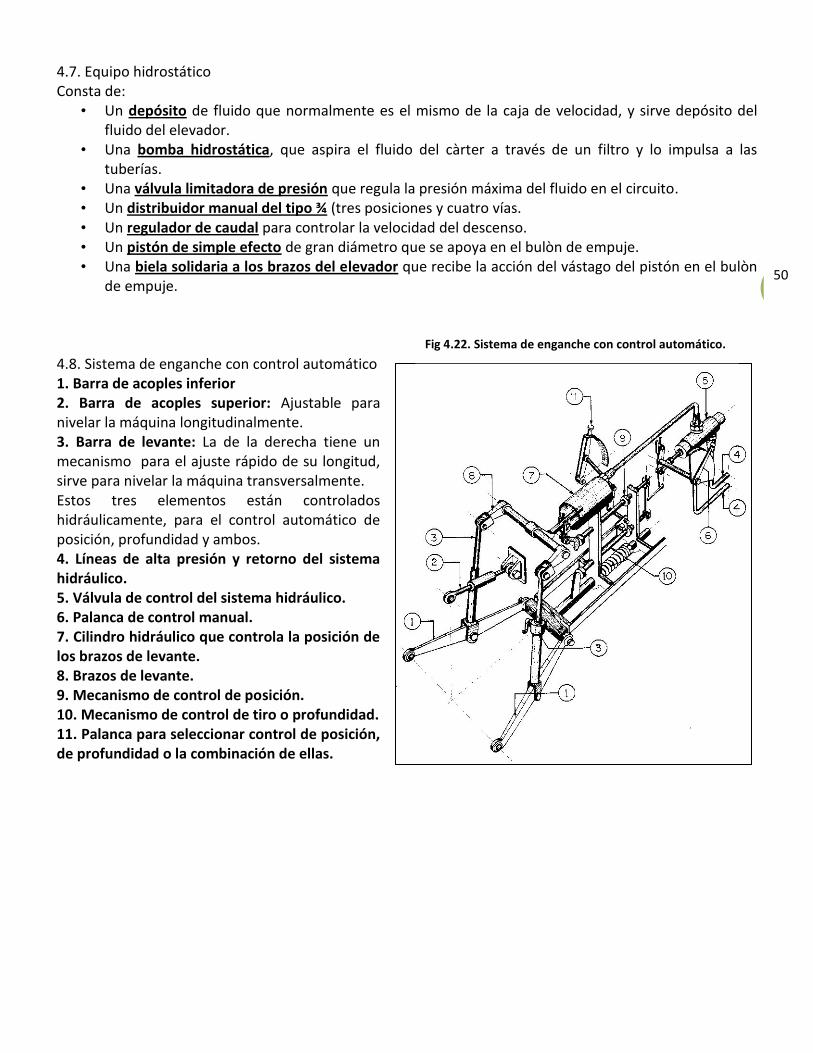
de empuje. 4.8. Sistema de enganche con control automático 1. Barra de acoples inferior 2. Barra de acoples superior: Ajustable para nivelar la máquina longitudinalmente. 3. Barra de levante: La de la derecha tiene un mecanismo para el ajuste rápido de su longitud, sirve para nivelar la máquina transversalmente. Estos tres elementos están controlados hidráulicamente, para el control automático de posición, profundidad y ambos. 4. Líneas de alta presión y retorno del sistema hidráulico. 5. Válvula de control del sistema hidráulico. 6. Palanca de control manual. 7. Cilindro hidráulico que controla la posición de los brazos de levante. 8. Brazos de levante. 9. Mecanismo de control de posición. 10. Mecanismo de control de tiro o profundidad. 11. Palanca para seleccionar control de posición, de profundidad o la combinación de ellas.
Fig 4.22. Sistema de enganche con control automático.
50
58
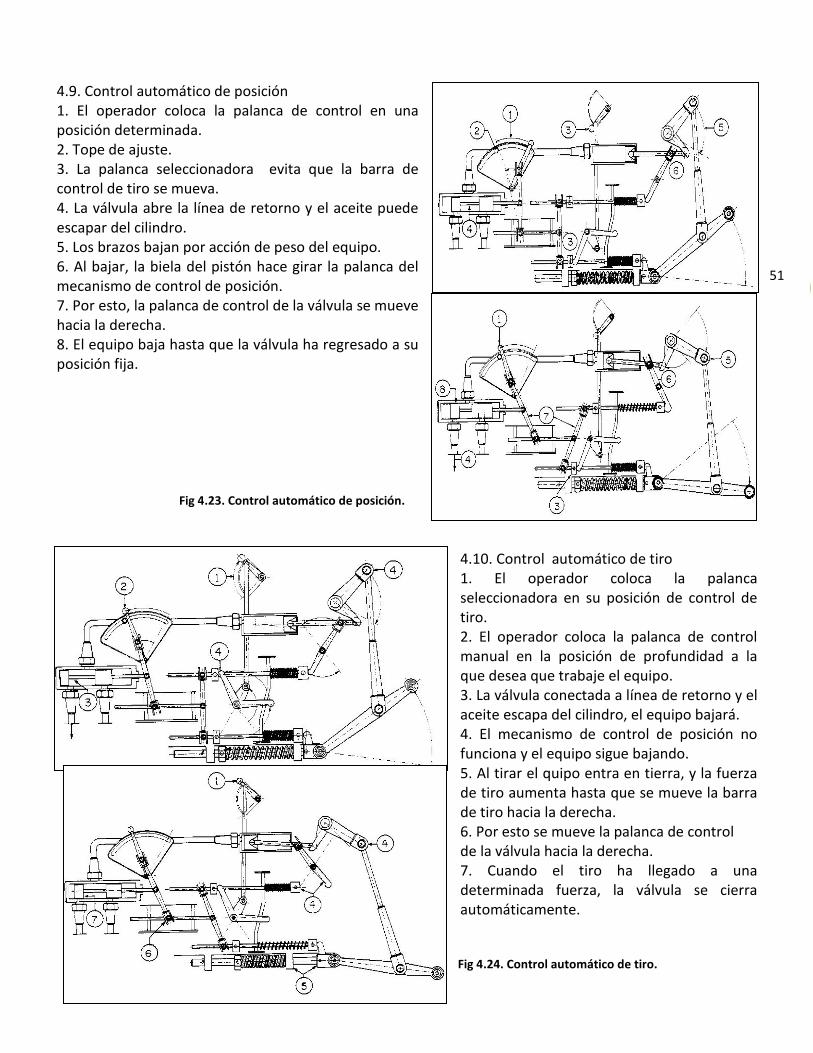
4.9. Control automático de posición 1. El operador coloca la palanca de control en una posición determinada. 2. Tope de ajuste. 3. La palanca seleccionadora evita que la barra de control de tiro se mueva. 4. La válvula abre la línea de retorno y el aceite puede escapar del cilindro. 5. Los brazos bajan por acción de peso del equipo. 6. Al bajar, la biela del pistón hace girar la palanca del mecanismo de control de posición. 7. Por esto, la palanca de control de la válvula se mueve hacia la derecha. 8. El equipo baja hasta que la válvula ha regresado a su posición fija.
4.10. Control automático de tiro 1. El operador coloca la palanca seleccionadora en su posición de control de tiro. 2. El operador coloca la palanca de control manual en la posición de profundidad a la que desea que trabaje el equipo. 3. La válvula conectada a línea de retorno y el aceite escapa del cilindro, el equipo bajará. 4. El mecanismo de control de posición no funciona y el equipo sigue bajando. 5. Al tirar el quipo entra en tierra, y la fuerza de tiro aumenta hasta que se mueve la barra de tiro hacia la derecha. 6. Por esto se mueve la palanca de control de la válvula hacia la derecha. 7. Cuando el tiro ha llegado a una determinada fuerza, la válvula se cierra automáticamente.
Fig 4.23. Control automático de posición.
Fig 4.24. Control automático de tiro.
51
59
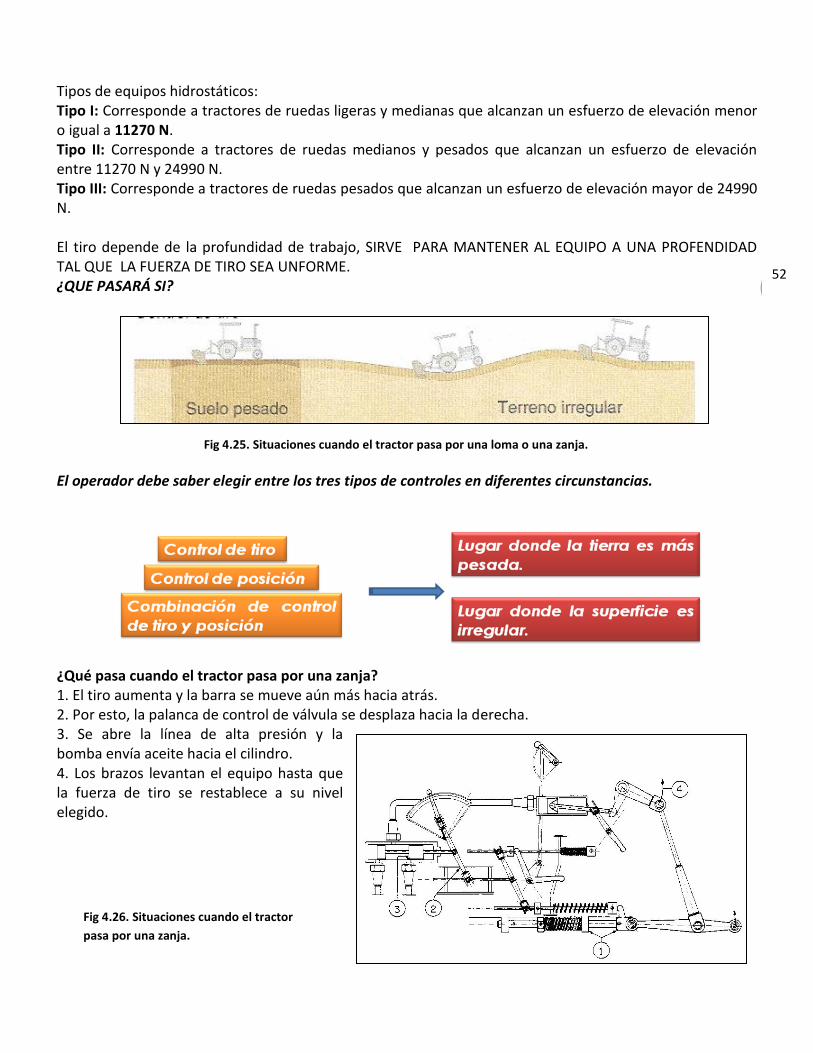
Tipos de equipos hidrostáticos: Tipo I: Corresponde a tractores de ruedas ligeras y medianas que alcanzan un esfuerzo de elevación menor o igual a 11270 N. Tipo II: Corresponde a tractores de ruedas medianos y pesados que alcanzan un esfuerzo de elevación entre 11270 N y 24990 N. Tipo III: Corresponde a tractores de ruedas pesados que alcanzan un esfuerzo de elevación mayor de 24990 N. El tiro depende de la profundidad de trabajo, SIRVE PARA MANTENER AL EQUIPO A UNA PROFENDIDAD TAL QUE LA FUERZA DE TIRO SEA UNFORME. ¿QUE PASARÁ SI? El operador debe saber elegir entre los tres tipos de controles en diferentes circunstancias. ¿Qué pasa cuando el tractor pasa por una zanja? 1. El tiro aumenta y la barra se mueve aún más hacia atrás. 2. Por esto, la palanca de control de válvula se desplaza hacia la derecha. 3. Se abre la línea de alta presión y la bomba envía aceite hacia el cilindro. 4. Los brazos levantan el equipo hasta que la fuerza de tiro se restablece a su nivel elegido.
Fig 4.25. Situaciones cuando el tractor pasa por una loma o una zanja.
Fig 4.26. Situaciones cuando el tractor
pasa por una zanja.
52
60
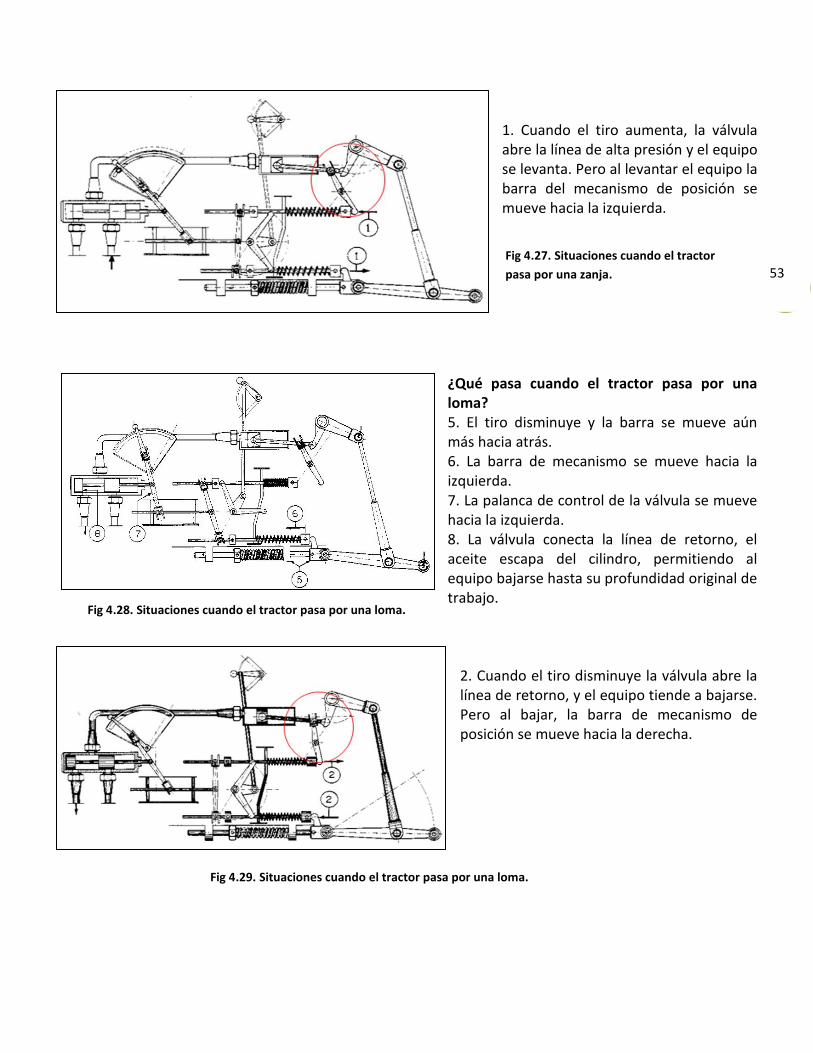
1. Cuando el tiro aumenta, la válvula abre la línea de alta presión y el equipo se levanta. Pero al levantar el equipo la barra del mecanismo de posición se mueve hacia la izquierda.
¿Qué pasa cuando el tractor pasa por una loma? 5. El tiro disminuye y la barra se mueve aún más hacia atrás. 6. La barra de mecanismo se mueve hacia la izquierda. 7. La palanca de control de la válvula se mueve hacia la izquierda. 8. La válvula conecta la línea de retorno, el aceite escapa del cilindro, permitiendo al equipo bajarse hasta su profundidad original de trabajo.
2. Cuando el tiro disminuye la válvula abre la línea de retorno, y el equipo tiende a bajarse. Pero al bajar, la barra de mecanismo de posición se mueve hacia la derecha.
Fig 4.27. Situaciones cuando el tractor
pasa por una zanja.
Fig 4.28. Situaciones cuando el tractor pasa por una loma.
Fig 4.29. Situaciones cuando el tractor pasa por una loma.
53
61
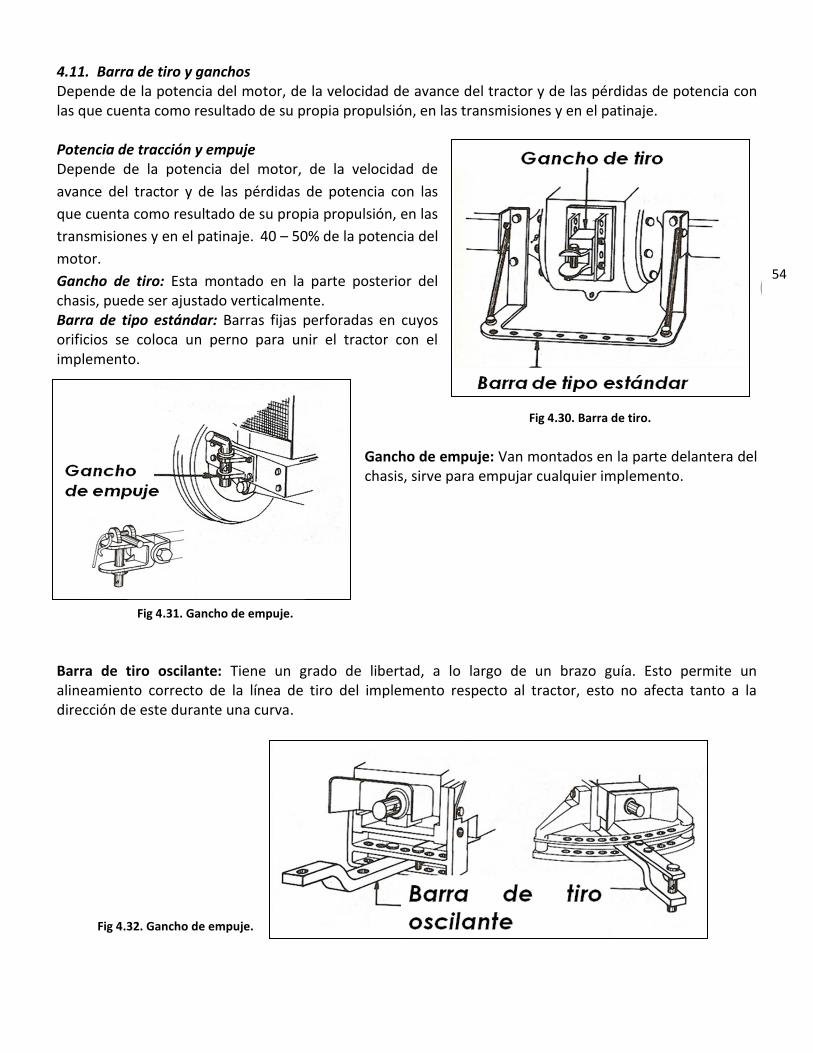
4.11. Barra de tiro y ganchos Depende de la potencia del motor, de la velocidad de avance del tractor y de las pérdidas de potencia con las que cuenta como resultado de su propia propulsión, en las transmisiones y en el patinaje. Potencia de tracción y empuje Depende de la potencia del motor, de la velocidad de
avance del tractor y de las pérdidas de potencia con las
que cuenta como resultado de su propia propulsión, en las
transmisiones y en el patinaje. 40 – 50% de la potencia del
motor.
Gancho de tiro: Esta montado en la parte posterior del chasis, puede ser ajustado verticalmente. Barra de tipo estándar: Barras fijas perforadas en cuyos orificios se coloca un perno para unir el tractor con el implemento.
Gancho de empuje: Van montados en la parte delantera del chasis, sirve para empujar cualquier implemento.
Barra de tiro oscilante: Tiene un grado de libertad, a lo largo de un brazo guía. Esto permite un alineamiento correcto de la línea de tiro del implemento respecto al tractor, esto no afecta tanto a la dirección de este durante una curva.
Fig 4.30. Barra de tiro.
Fig 4.31. Gancho de empuje.
Fig 4.32. Gancho de empuje.
54
62
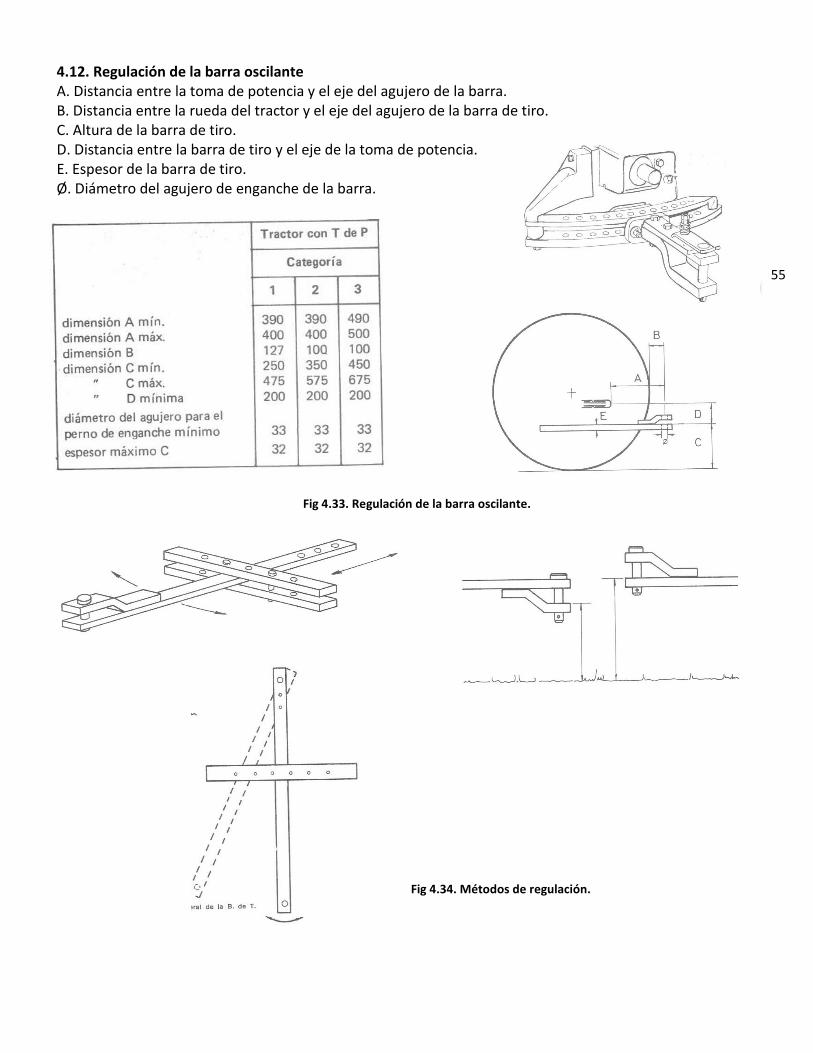
4.12. Regulación de la barra oscilante A. Distancia entre la toma de potencia y el eje del agujero de la barra. B. Distancia entre la rueda del tractor y el eje del agujero de la barra de tiro. C. Altura de la barra de tiro. D. Distancia entre la barra de tiro y el eje de la toma de potencia. E. Espesor de la barra de tiro. Ø. Diámetro del agujero de enganche de la barra.
Fig 4.33. Regulación de la barra oscilante.
Fig 4.34. Métodos de regulación.
55
63
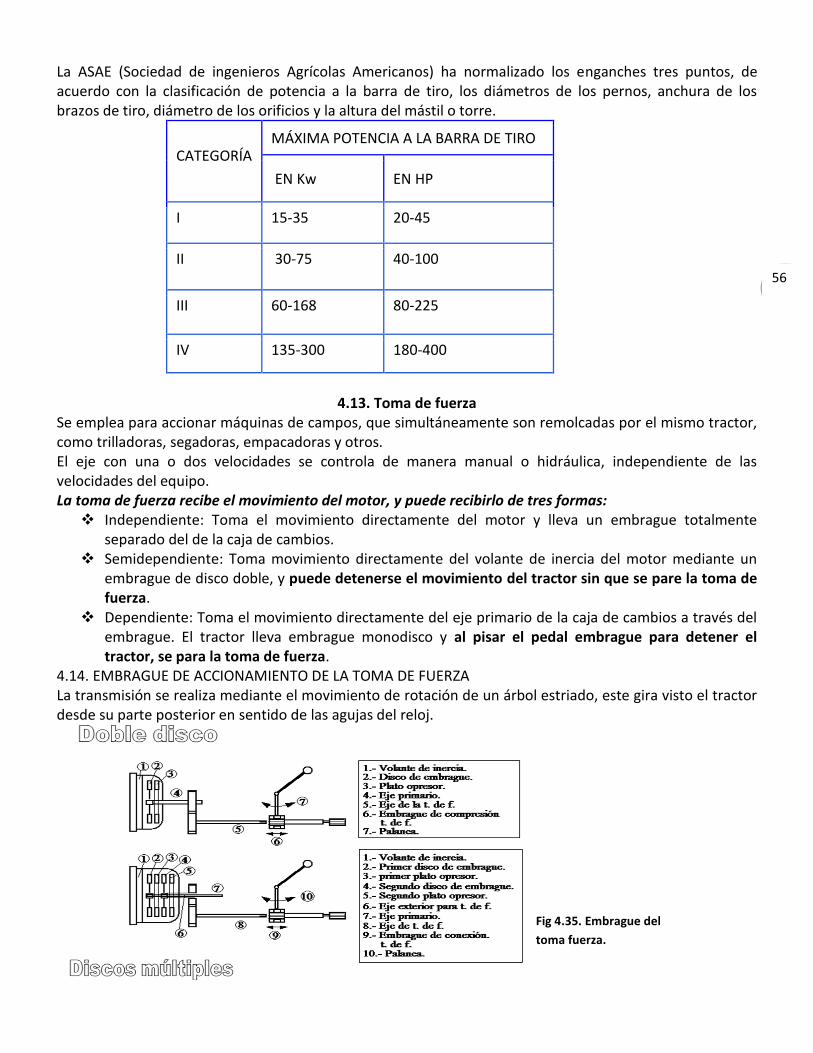
La ASAE (Sociedad de ingenieros Agrícolas Americanos) ha normalizado los enganches tres puntos, de acuerdo con la clasificación de potencia a la barra de tiro, los diámetros de los pernos, anchura de los brazos de tiro, diámetro de los orificios y la altura del mástil o torre.
CATEGORÍA
MÁXIMA POTENCIA A LA BARRA DE TIRO
EN Kw EN HP
I 15-35 20-45
II 30-75 40-100
III 60-168 80-225
IV 135-300 180-400
4.13. Toma de fuerza
Se emplea para accionar máquinas de campos, que simultáneamente son remolcadas por el mismo tractor, como trilladoras, segadoras, empacadoras y otros. El eje con una o dos velocidades se controla de manera manual o hidráulica, independiente de las velocidades del equipo. La toma de fuerza recibe el movimiento del motor, y puede recibirlo de tres formas: Independiente: Toma el movimiento directamente del motor y lleva un embrague totalmente
separado del de la caja de cambios. Semidependiente: Toma movimiento directamente del volante de inercia del motor mediante un
embrague de disco doble, y puede detenerse el movimiento del tractor sin que se pare la toma de fuerza.
Dependiente: Toma el movimiento directamente del eje primario de la caja de cambios a través del embrague. El tractor lleva embrague monodisco y al pisar el pedal embrague para detener el tractor, se para la toma de fuerza.
4.14. EMBRAGUE DE ACCIONAMIENTO DE LA TOMA DE FUERZA La transmisión se realiza mediante el movimiento de rotación de un árbol estriado, este gira visto el tractor desde su parte posterior en sentido de las agujas del reloj.
Fig 4.35. Embrague del
toma fuerza.
56
64
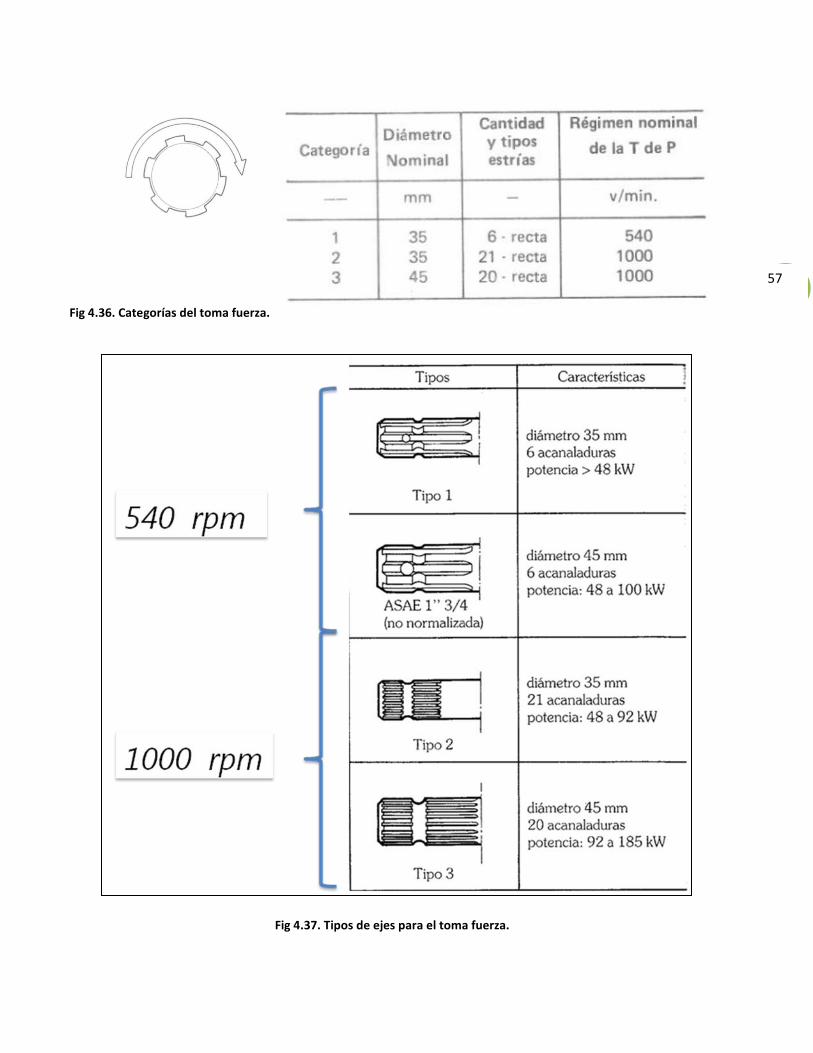
Fig 4.36. Categorías del toma fuerza.
Fig 4.37. Tipos de ejes para el toma fuerza.
57
65
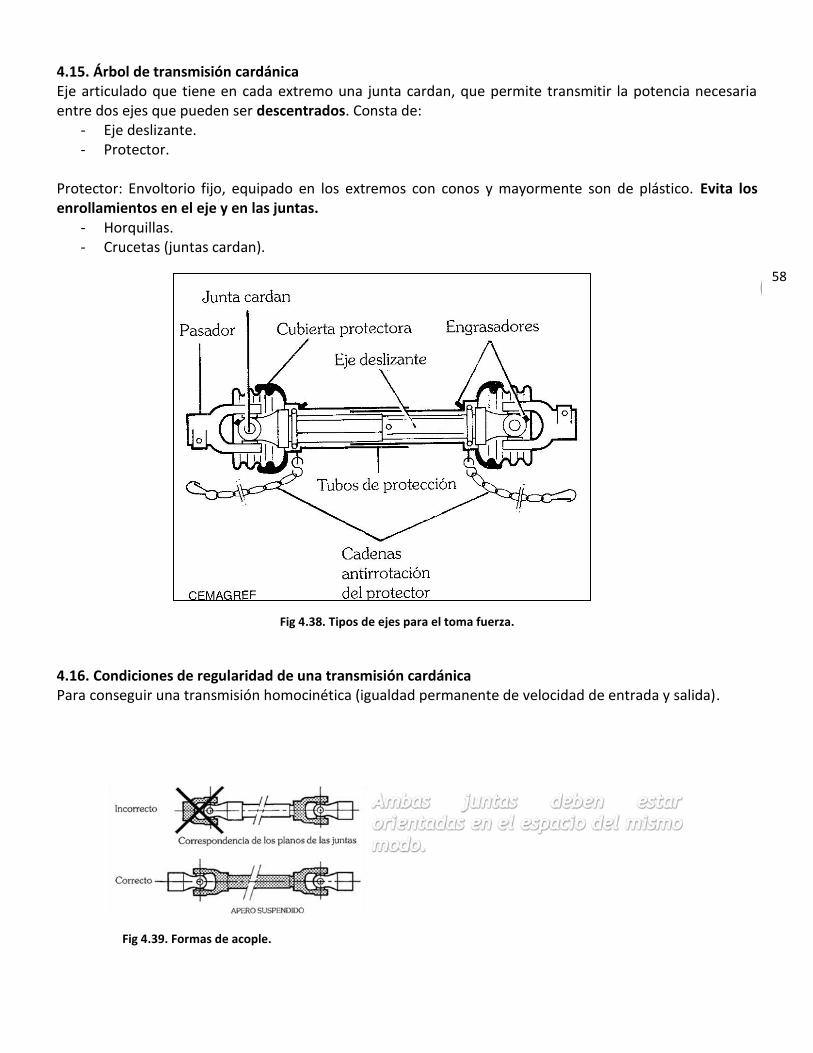
4.15. Árbol de transmisión cardánica Eje articulado que tiene en cada extremo una junta cardan, que permite transmitir la potencia necesaria entre dos ejes que pueden ser descentrados. Consta de:
- Eje deslizante. - Protector.
Protector: Envoltorio fijo, equipado en los extremos con conos y mayormente son de plástico. Evita los enrollamientos en el eje y en las juntas.
- Horquillas. - Crucetas (juntas cardan).
4.16. Condiciones de regularidad de una transmisión cardánica Para conseguir una transmisión homocinética (igualdad permanente de velocidad de entrada y salida).
Fig 4.38. Tipos de ejes para el toma fuerza.
Fig 4.39. Formas de acople.
58
66
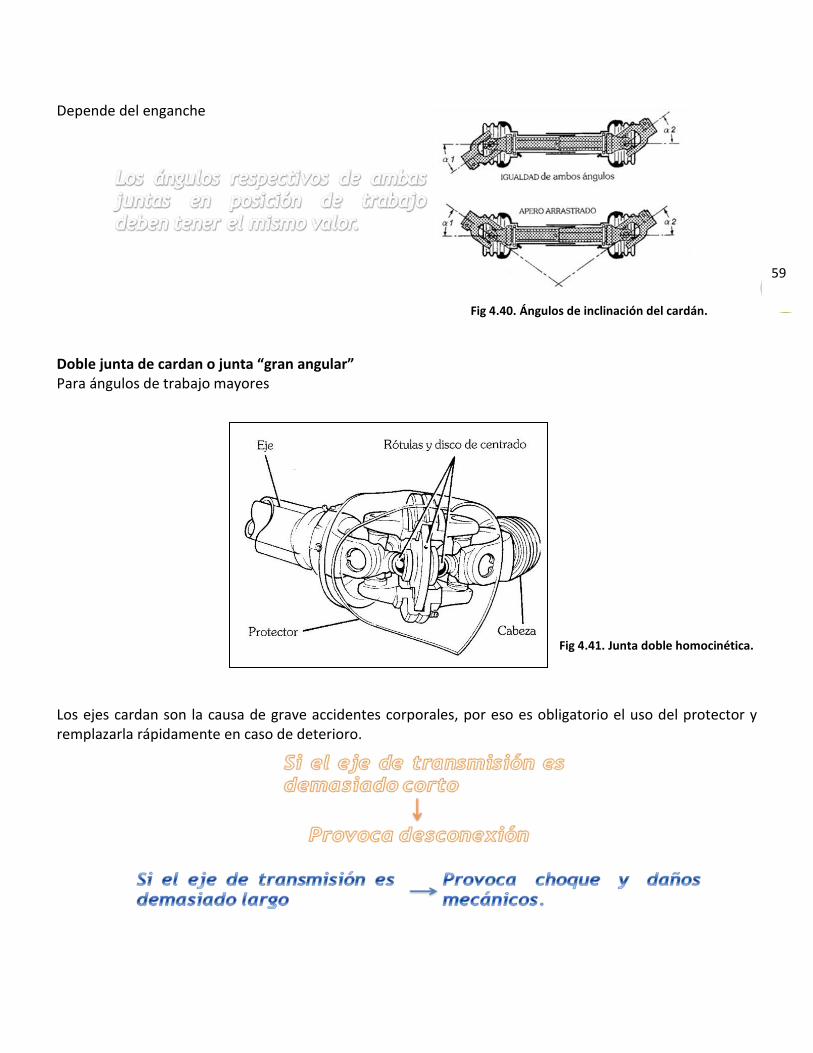
Depende del enganche Doble junta de cardan o junta “gran angular” Para ángulos de trabajo mayores Los ejes cardan son la causa de grave accidentes corporales, por eso es obligatorio el uso del protector y remplazarla rápidamente en caso de deterioro.
Fig 4.40. Ángulos de inclinación del cardán.
Fig 4.41. Junta doble homocinética.
59
67
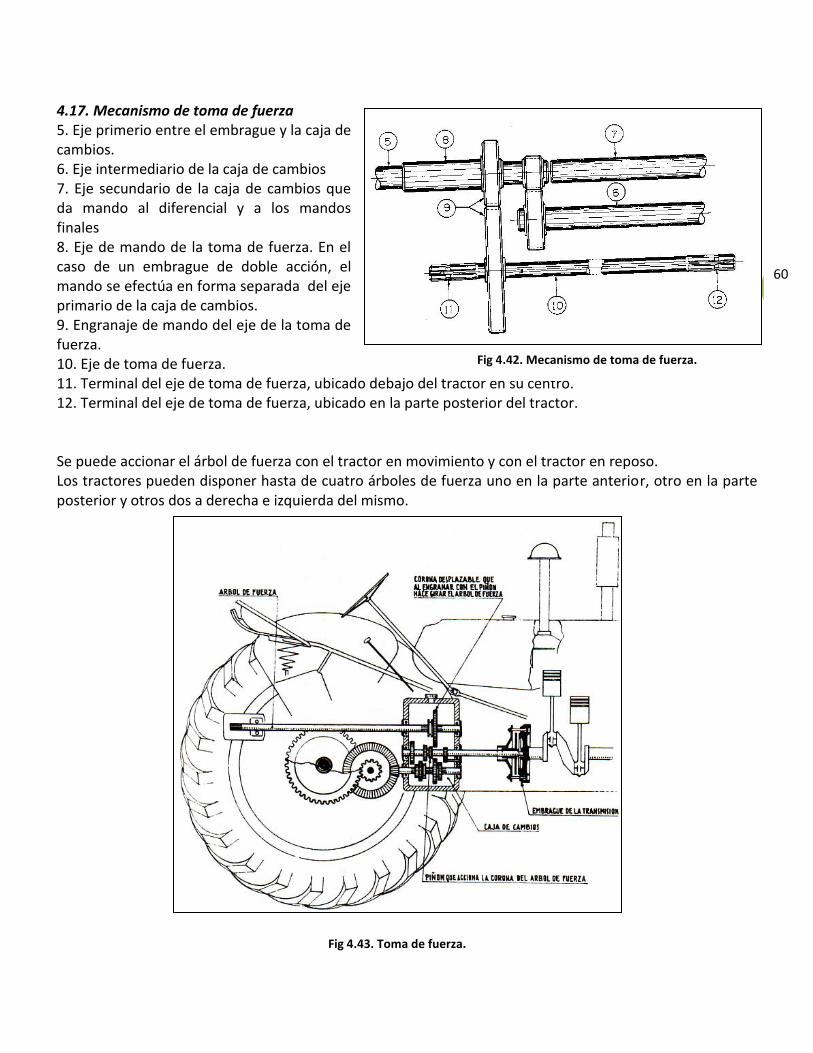
4.17. Mecanismo de toma de fuerza 5. Eje primerio entre el embrague y la caja de cambios. 6. Eje intermediario de la caja de cambios 7. Eje secundario de la caja de cambios que da mando al diferencial y a los mandos finales 8. Eje de mando de la toma de fuerza. En el caso de un embrague de doble acción, el mando se efectúa en forma separada del eje primario de la caja de cambios. 9. Engranaje de mando del eje de la toma de fuerza. 10. Eje de toma de fuerza. 11. Terminal del eje de toma de fuerza, ubicado debajo del tractor en su centro. 12. Terminal del eje de toma de fuerza, ubicado en la parte posterior del tractor. Se puede accionar el árbol de fuerza con el tractor en movimiento y con el tractor en reposo. Los tractores pueden disponer hasta de cuatro árboles de fuerza uno en la parte anterior, otro en la parte posterior y otros dos a derecha e izquierda del mismo.
Fig 4.42. Mecanismo de toma de fuerza.
Fig 4.43. Toma de fuerza.
60
68
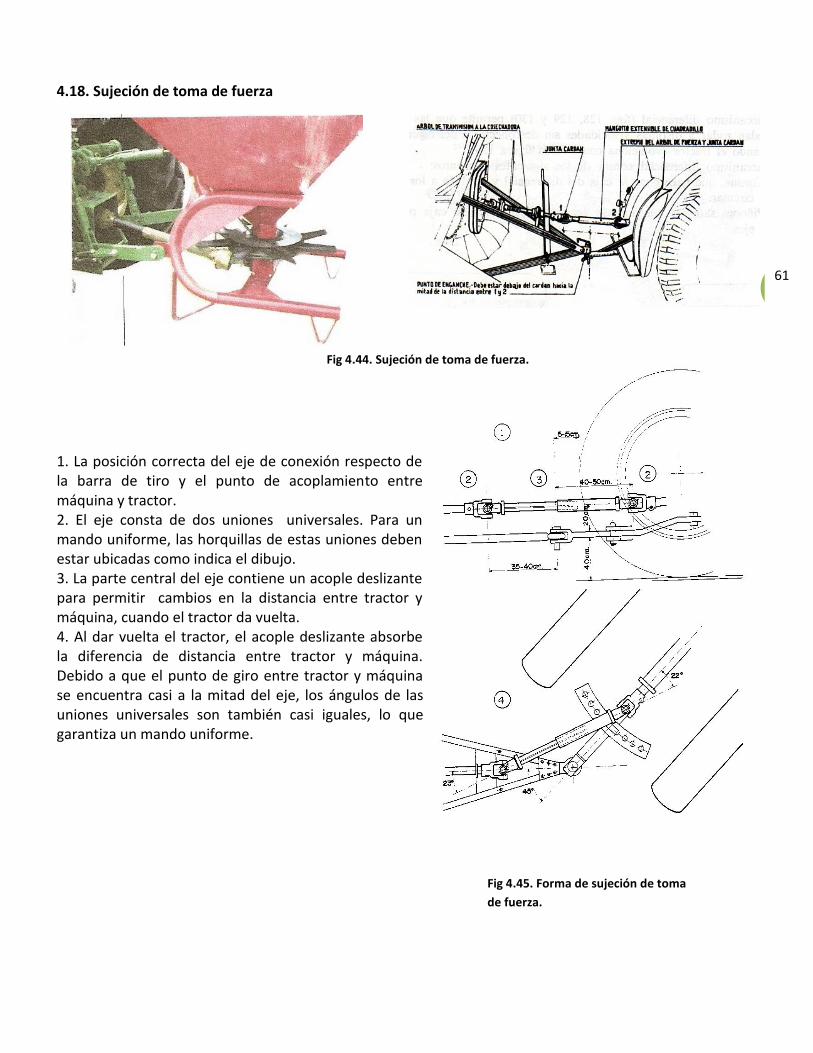
4.18. Sujeción de toma de fuerza
1. La posición correcta del eje de conexión respecto de la barra de tiro y el punto de acoplamiento entre máquina y tractor. 2. El eje consta de dos uniones universales. Para un mando uniforme, las horquillas de estas uniones deben estar ubicadas como indica el dibujo. 3. La parte central del eje contiene un acople deslizante para permitir cambios en la distancia entre tractor y máquina, cuando el tractor da vuelta. 4. Al dar vuelta el tractor, el acople deslizante absorbe la diferencia de distancia entre tractor y máquina. Debido a que el punto de giro entre tractor y máquina se encuentra casi a la mitad del eje, los ángulos de las uniones universales son también casi iguales, lo que garantiza un mando uniforme.
Fig 4.44. Sujeción de toma de fuerza.
Fig 4.45. Forma de sujeción de toma
de fuerza.
61
69
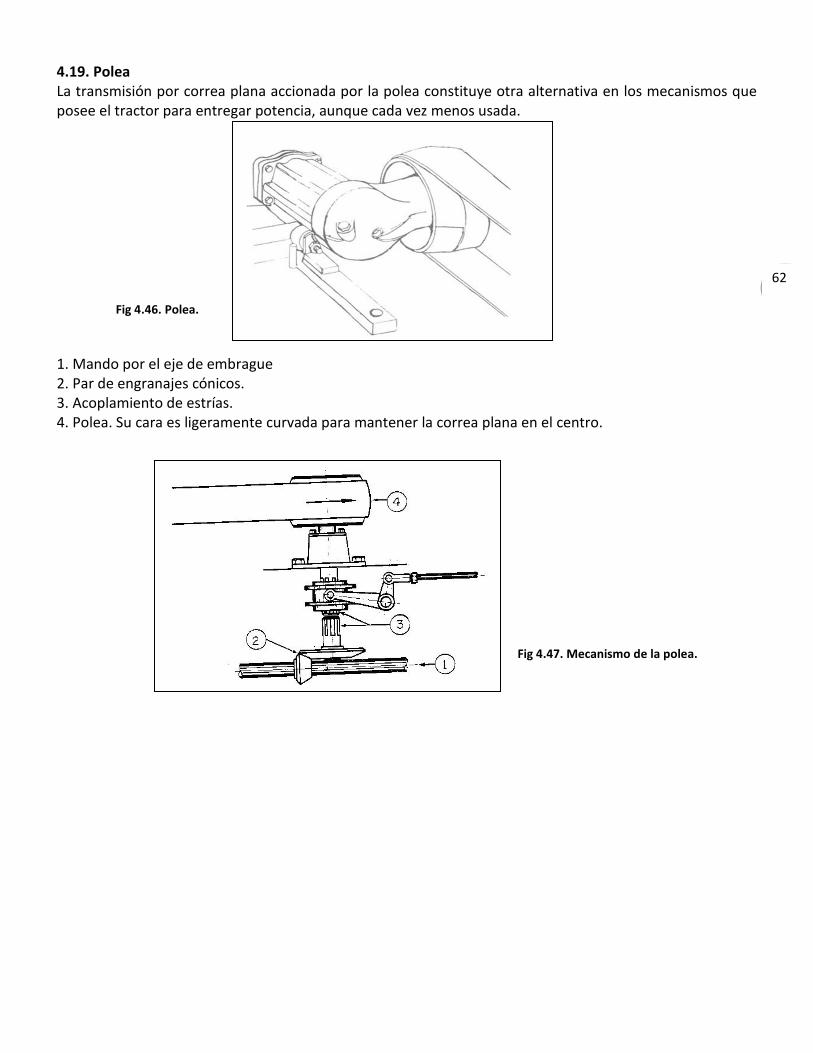
4.19. Polea La transmisión por correa plana accionada por la polea constituye otra alternativa en los mecanismos que posee el tractor para entregar potencia, aunque cada vez menos usada. 1. Mando por el eje de embrague 2. Par de engranajes cónicos. 3. Acoplamiento de estrías. 4. Polea. Su cara es ligeramente curvada para mantener la correa plana en el centro.
Fig 4.46. Polea.
Fig 4.47. Mecanismo de la polea.
62
70
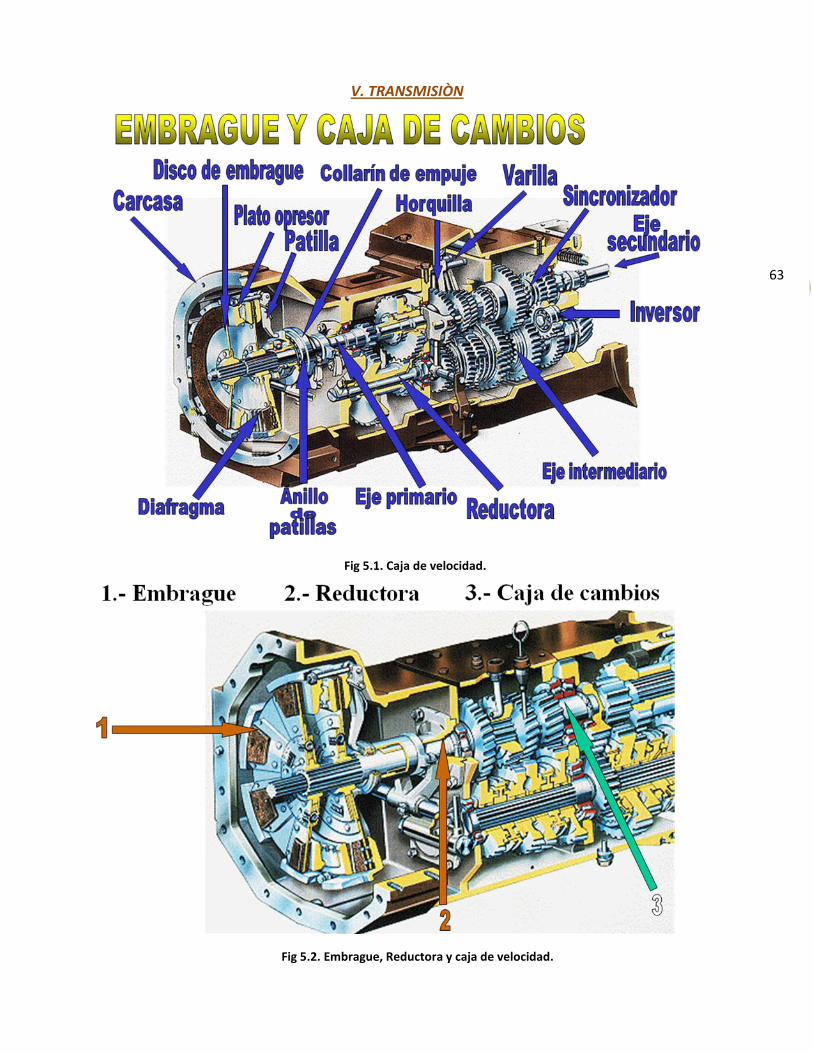
V. TRANSMISIÒN
Fig 5.1. Caja de velocidad.
Fig 5.2. Embrague, Reductora y caja de velocidad.
63
71
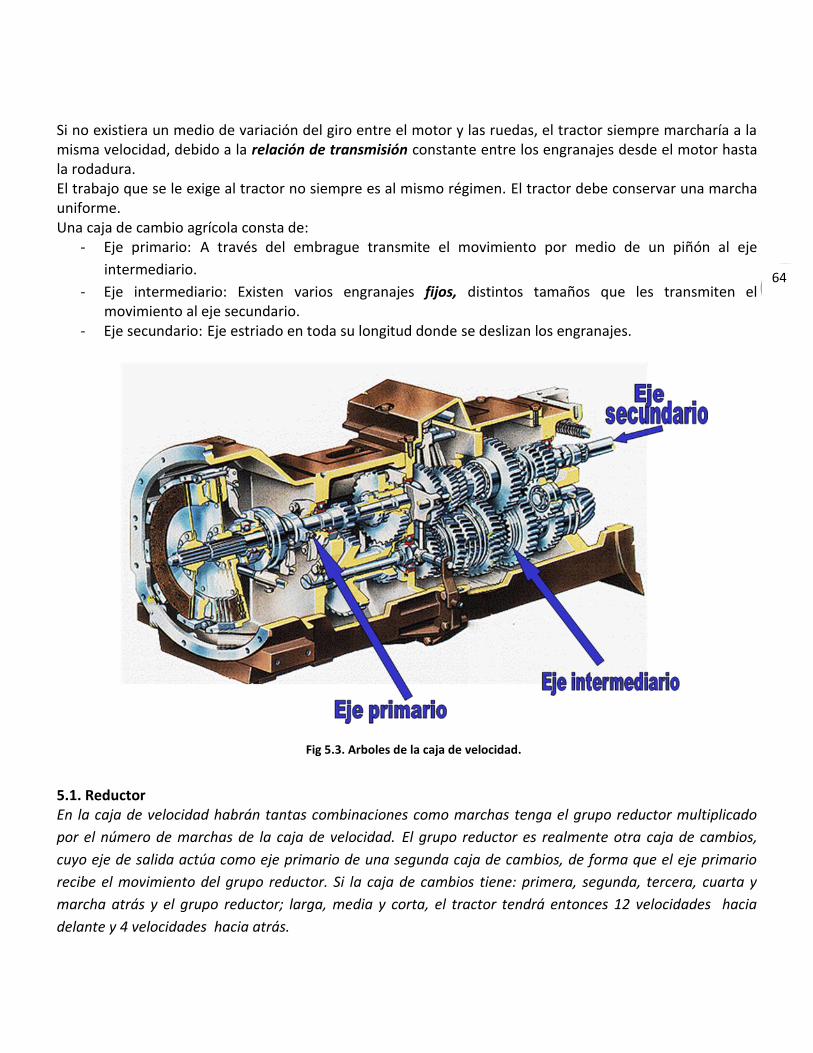
Si no existiera un medio de variación del giro entre el motor y las ruedas, el tractor siempre marcharía a la misma velocidad, debido a la relación de transmisión constante entre los engranajes desde el motor hasta la rodadura. El trabajo que se le exige al tractor no siempre es al mismo régimen. El tractor debe conservar una marcha uniforme. Una caja de cambio agrícola consta de:
- Eje primario: A través del embrague transmite el movimiento por medio de un piñón al eje
intermediario.
- Eje intermediario: Existen varios engranajes fijos, distintos tamaños que les transmiten el movimiento al eje secundario.
- Eje secundario: Eje estriado en toda su longitud donde se deslizan los engranajes.
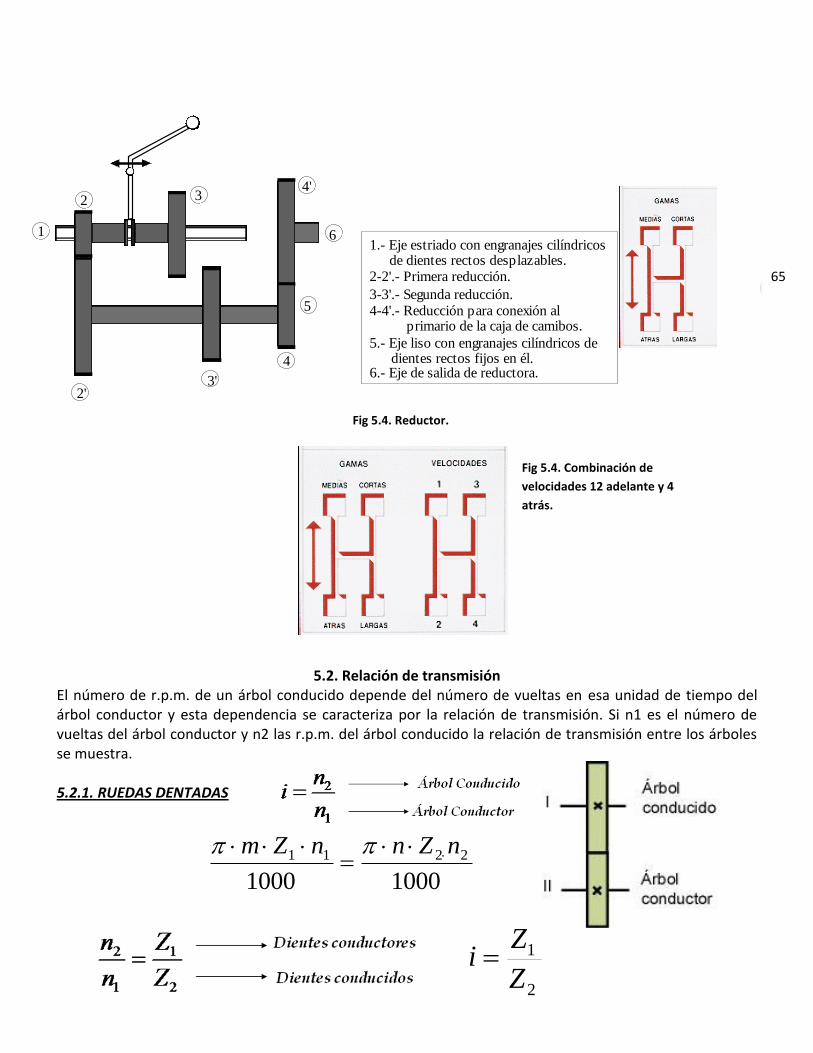
5.1. Reductor En la caja de velocidad habrán tantas combinaciones como marchas tenga el grupo reductor multiplicado
por el número de marchas de la caja de velocidad. El grupo reductor es realmente otra caja de cambios,
cuyo eje de salida actúa como eje primario de una segunda caja de cambios, de forma que el eje primario
recibe el movimiento del grupo reductor. Si la caja de cambios tiene: primera, segunda, tercera, cuarta y
marcha atrás y el grupo reductor; larga, media y corta, el tractor tendrá entonces 12 velocidades hacia
delante y 4 velocidades hacia atrás.
Fig 5.3. Arboles de la caja de velocidad.
64
72
5.2. Relación de transmisión
El número de r.p.m. de un árbol conducido depende del número de vueltas en esa unidad de tiempo del árbol conductor y esta dependencia se caracteriza por la relación de transmisión. Si n1 es el número de vueltas del árbol conductor y n2 las r.p.m. del árbol conducido la relación de transmisión entre los árboles se muestra. 5.2.1. RUEDAS DENTADAS
1
2 34'
6
5
4
3'2'
1.- Eje estriado con engranajes cilíndricosde dientes rectos desplazables.
2-2'.- Primera reducción.
3-3'.- Segunda reducción.4-4'.- Reducción para conexión al
primario de la caja de camibos.
5.- Eje liso con engranajes cilíndricos dedientes rectos fijos en él.
6.- Eje de salida de reductora.
Fig 5.4. Reductor.
Fig 5.4. Combinación de
velocidades 12 adelante y 4
atrás.
10001000
2211 nZnnZm
2
1
Z
Zi
65
73
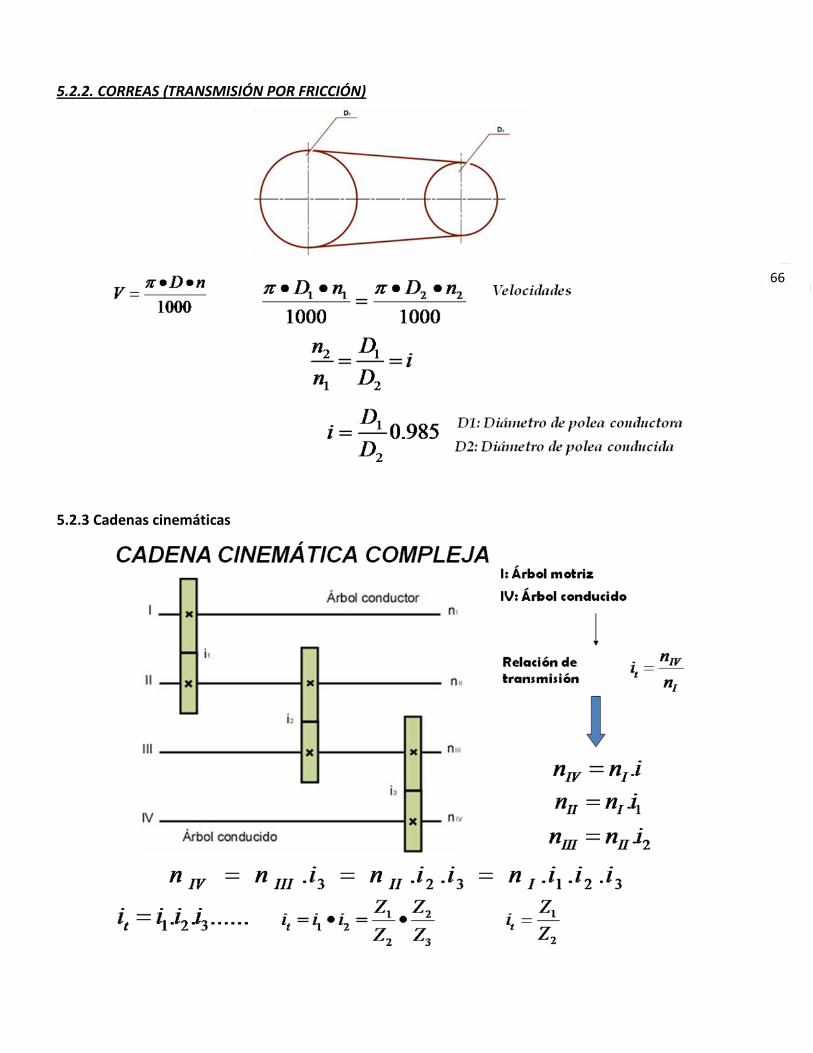
5.2.2. CORREAS (TRANSMISIÓN POR FRICCIÓN) 5.2.3 Cadenas cinemáticas
66
74
5.3. Ejercicio
985.0....2
1
)3(10
9
8
7
)2(6
5
4
3
2
1
)1(
D
D
Z
Z
Z
Z
Z
Z
Z
Z
Z
Z
Z
Znn
b
amH
67
75
5.4. Embrague El embrague tiene como objetivo conectar y desconectar el movimiento que transmite el motor a la caja de cambios. Encargado de transmitir la potencia del motor a voluntad del conductor. Se puede considerar, como un transmisor de par motor a un régimen de giro. Posición normal: Sin pisar o suelto, el embrague transmite el movimiento del motor a la caja de cambios. Pedal pisado: El embrague deja de transmitir el movimiento del motor a la caja de cambios. El embrague está diseñado para soportar fuerzas bruscas o tensiones con el vehículo parado, por eso debe ser elástico. El embrague se encuentra entre el volante del motor y la caja de cambios. 1.- Árbol motor: Tapa metálica unida al volante de inercia del motor mediante tornillos denominados campana (3), que encierran al volante y al resto de las piezas, estas giran a la vez. 2.- Volante. 4.- Disco embrague. 5.- Plato opresor metálico: tiene forma de corona circular del mismo tamaño que lo foros de embrague, que lleva unos soporte sobre los cuales actúan las patillas (7). 6.- Resortes. 7.- Patillas: Generalmente 3 ò 4, que actúan como palanca de primer género y que tienen un punto de apoyo y giro unido a la campana. 8.- Collarìn: Formado por un rodamiento axial con un orificio central por el que pasa el eje primario. Este elemento apoya por un lado en el anillo de patillas y por el otro recibe el empuje de la horquilla. 9.- Eje primario. 10.- Soporte de las patillas.
Fig 5.5. Embrague
monodisco.
68

76
5.4.1. Disco de embrague 1.- Formado por un disco de acero con unos cortes radiales (2) en su periferia, que forman una especie de lengüeta o segmentos circulares. 3.- Platillo. El disco metálico va unido al platillo con interposición de los muelles (4) que le confiere la deseable elasticidad 5.- En su parte central lleva un manguito estriado en su parte interior, dentro del cual se aloja un extremo del eje primario de la caja de cambios, que esta estriado exteriormente con un diseño acoplable al que el disco de embrague lleva en su interior. 6.- En la parte periférica del disco metálico van unidas mediante remaches dos coronas circulares denominadas forros de embrague. 7.- Remache: Mantiene unido el platillo a los forros de embrague.
1. Foros: Estos forros están constituidos por amianto, resinas sintéticas e hilos de cobre o latón, que constituye un material altamente resistente a la fricción. Son los encargados de transmitir sin que se produzca deslizamiento, por lo que su material debe tener un alto coeficiente de roce.
2. Remache. 3. Manguito mandrinado. 4. Muelle de elasticidad.
Fig 5.6. Disco
de embrague.
Fig 5.7. Foro, muelle
y remaches
69
77
5.4.2. Plato opresor 1.- Plato opresor: Disco metálico. 2.- Fijación de patillas: Esta unido por un extremo en el plato opresor y por el otro se apoya sobre el anillo de patilla 3.- Resortes: Se apoyan por uno de sus extremos sobre la campana, y por el otro sobre el plato opresor, generalmente son 9 ò 12 resortes.
5.4.3. Funcionamiento del embrague
1
2
3
1.- Plato opresor.
2.- Fijación de patillas.3.- Resorte.
Fig 5.8. Plato opresor.
Fig 5.9. a) Embrague en
funcionamiento.
70
78
5.5. Diferencial El mecanismo diferencial permite que las ruedas motrices puedan rodar a distintas velocidades sin
desconectarse del cigüeñal lo que ocurre cuando el tractor o un carro realizan un cruce. El mecanismo
diferencial es un tren planetario de piñones cónicos, cuya misión es permitir velocidades de giro distintas en
las dos ruedas del tractor cuando este toma una curva.
Fig 5.9. b) Embrague en funcionamiento.
Fig 5.10. Diferencial.
DIFERENCIAL
El mecanismo diferencial es un tren planetario de piñones cónicos cuya misión es permitir
velocidades de giro distintas en las dos ruedas del tractor cuando éste toma una curva.
Consta de los siguientes elementos:
1.- Eje secundario.
2.- Piñón de ataque.
3.- Corona.
4-6.- Planetario.
5-7.- Satélite.
8.- Caja portasatélites.
9.- Garra de bloqueo.
10-11.- Sem ipalieres.
1
2
3
410
97
11
6
8
5
71
79
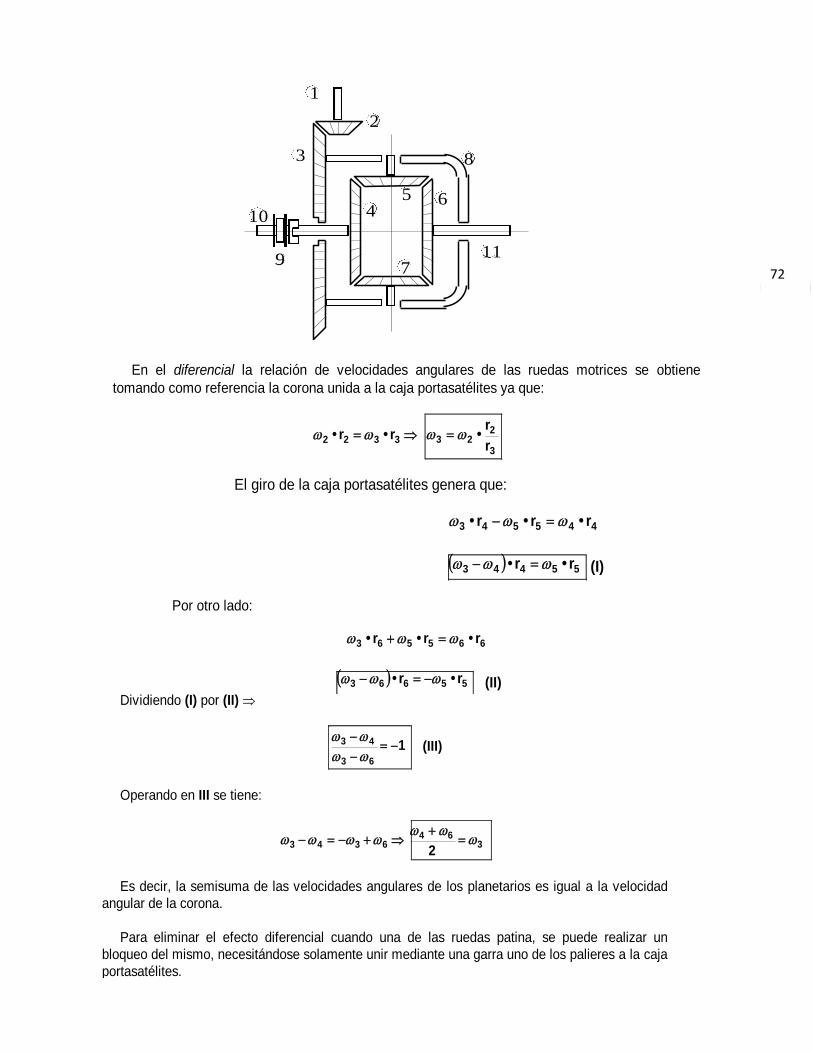
DIFERENCIAL
El mecanismo diferencial es un tren planetario de piñones cónicos cuya misión es permitir
velocidades de giro distintas en las dos ruedas del tractor cuando éste toma una curva.
Consta de los siguientes elementos:
1.- Eje secundario.
2.- Piñón de ataque.
3.- Corona.
4-6.- Planetario.
5-7.- Satélite.
8.- Caja portasatélites.
9.- Garra de bloqueo.
10-11.- Sem ipalieres.
1
2
3
410
97
11
6
8
5
En el diferencial la relación de velocidades angulares de las ruedas motrices se obtiene
tomando como referencia la corona unida a la caja portasatélites ya que:
r•r• 3322 3
223
r
r•
El giro de la caja portasatélites genera que:
445543 r•r•r•
55443 r•r• (I)
Por otro lado:
665563 r•r•r•
55663 r•r• (II)
En el diferencial la relación de velocidades angulares de las ruedas motrices se obtiene
tomando como referencia la corona unida a la caja portasatélites ya que:
r•r• 3322 3
223
r
r•
El giro de la caja portasatélites genera que:
445543 r•r•r•
55443 r•r• (I)
Por otro lado:
665563 r•r•r•
55663 r•r• (II)
En el diferencial la relación de velocidades angulares de las ruedas motrices se obtiene
tomando como referencia la corona unida a la caja portasatélites ya que:
r•r• 3322 3
223
r
r•
El giro de la caja portasatélites genera que:
445543 r•r•r•
55443 r•r• (I)
Por otro lado:
665563 r•r•r•
55663 r•r• (II)
Dividiendo (I) por (II)
163
43
(III)
Operando en III se tiene:
6343 364
2
Es decir, la semisuma de las velocidades angulares de los planetarios es igual a la velocidad
angular de la corona.
Para eliminar el efecto diferencial cuando una de las ruedas patina, se puede realizar un
bloqueo del mismo, necesitándose solamente unir mediante una garra uno de los palieres a la caja
portasatélites.
72
80
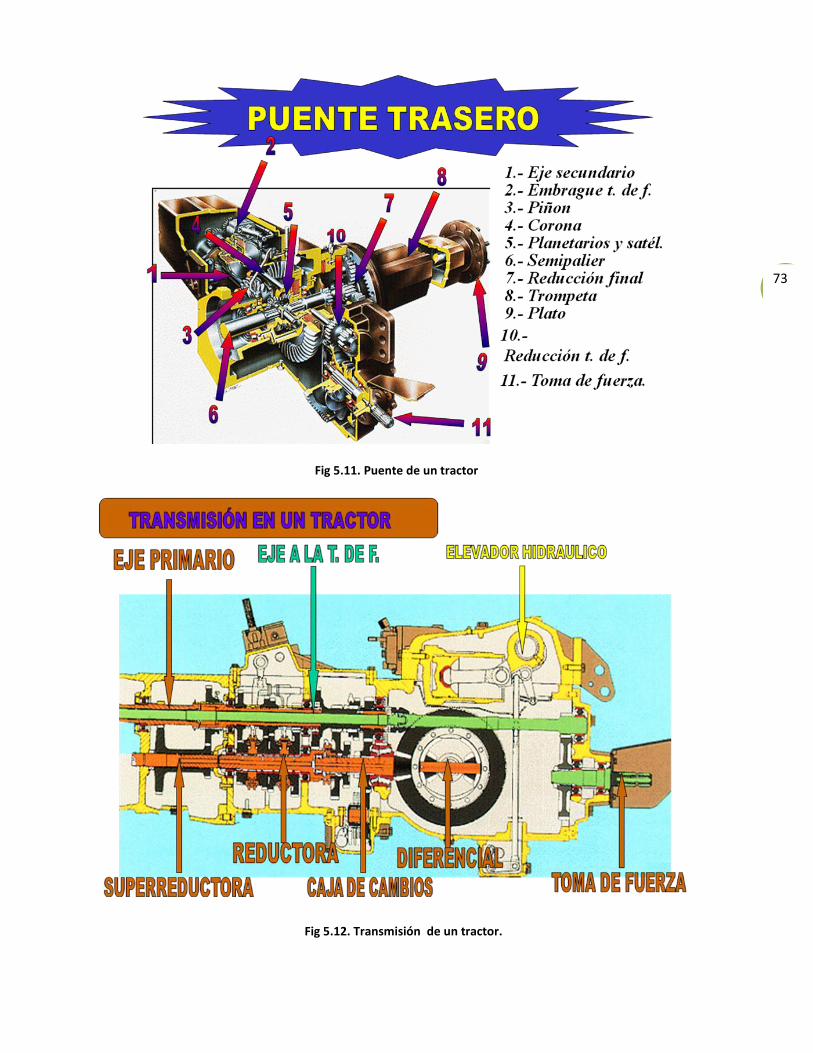
Fig 5.11. Puente de un tractor
Fig 5.12. Transmisión de un tractor.
73
81
REFERENCIAS
1.- Arnal P. (2000). Potencia de los tractores agrícolas. Director General de AEA ASAJA Huesca. Boletín extraordinario de la Asociación Empresarial Agropecuaria. Seis páginas en PDF. España.
2.- Compilación del Dr. Julio Nolberto Pérez. 3.- Dávila, Rafael E. (2005). Administración y planificación de maquinaria agrícola.
Universidad Central de Venezuela. Venezuela. 4.- Ediciones CEAC (1999). Máquinas y aperos para labores agrícolas. España. 5.- Editorial Trillas (1982). Tractores agrícola. México. 6.- Evolución de los tractores. Ocho páginas en PDF. http/www.ulm.es/evolucióntractores. 7.- Gil, Freddy (1995). Energía y mecanización en la agricultura. Anauco ediciones C.A.
Universidad Central de Venezuela. Venezuela. 8.- Hunt, D. (1983). Maquinaria agrícola: Rendimiento económico, costos, operaciones y
selección de equipo. Editorial Limusa. Estados Unidos. 9.- Lostri A., Honorato A. (1986). Que tractor elegir. Oficina regional de la FAO para América
Latina y el Caribe. Chile. 10.- Pérez J./ Lafarga A. (2007). Conducción económica del tractor. 3 Ahorro y eficiencia
energética en agricultura. Navarra Agraria. 3 páginas en PDF. Argentina.
74


















