Ground Vibration Testing Results · 1999. 2. 3. · the project. The measurement and ... when...
45
53 5.0 Results The following section presents the results obtained from the ratio calibration, preliminary test troubleshooting, measurement and theory validation, final test data, and I-DEAS modal analysis. The discussion of the preliminary test troubleshooting involves some results and interpretations of the data that were used to improve data quality during the initial setup of the project. The measurement and theory validation section includes results from tests conducted on the coherence function, rigid-body-mode frequencies, Maxwell’s Reciprocity Theorem, excitation frequency range, discrete-measurement-point layout, and calibration ratio integration. In all sections, the FR (frequency response) amplitudes are presented in dB in order to resemble the characteristic FR shown in section 2.2 of Theory. 5.1 Ratio Calibration The ratio calibration of the load cell and accelerometer was an essential step toward performing an effective GVT of the Star-Lite aircraft. As presented in section 2.8 of Theory, the ratio calibration provides a calibration ratio that converts the output voltage ratio of the accelerometer/load-cell pair to the relative forces experienced at the different nodes of the aircraft. The ratio calibration was configured and performed as shown in Fig. 7 of the Theory section. The ratio calibration was performed for each axis of the multi-axial accelerometer, as described in the section 4.1 of Test Procedure and Setup. After the hanging mass was given an axial impact by the impulse hammer, an FFT provided the FR of the transient signal. The FR produced voltage ratios of accelerometer/load-cell output for each of the accelerometer coordinate axes. Figures 45, 46, and 47 present the FR data for the accelerometer x, y, and z axes, respectively. Frequency Response: Accel. X-Axis Versus Load Cell Avg=16 100m 12.5m /div 0 0 160 Hz/div 1.6k Figure 45. Frequency Response for the Ratio Calibration of the Accelerometer X-Axis
Transcript of Ground Vibration Testing Results · 1999. 2. 3. · the project. The measurement and ... when...

53
5.0 Results
The following section presents the results obtained from the ratio calibration, preliminary
test troubleshooting, measurement and theory validation, final test data, and I-DEAS modal
analysis. The discussion of the preliminary test troubleshooting involves some results and
interpretations of the data that were used to improve data quality during the initial setup of
the project. The measurement and theory validation section includes results from tests
conducted on the coherence function, rigid-body-mode frequencies, Maxwell’s Reciprocity
Theorem, excitation frequency range, discrete-measurement-point layout, and calibration
ratio integration. In all sections, the FR (frequency response) amplitudes are presented in
dB in order to resemble the characteristic FR shown in section 2.2 of Theory.
5.1 Ratio Calibration
The ratio calibration of the load cell and accelerometer was an essential step toward
performing an effective GVT of the Star-Lite aircraft. As presented in section 2.8 of
Theory, the ratio calibration provides a calibration ratio that converts the output voltage
ratio of the accelerometer/load-cell pair to the relative forces experienced at the different
nodes of the aircraft. The ratio calibration was configured and performed as shown in Fig.
7 of the Theory section.
The ratio calibration was performed for each axis of the multi-axial accelerometer, as
described in the section 4.1 of Test Procedure and Setup. After the hanging mass was
given an axial impact by the impulse hammer, an FFT provided the FR of the transient
signal. The FR produced voltage ratios of accelerometer/load-cell output for each of the
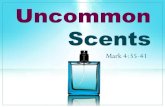
accelerometer coordinate axes. Figures 45, 46, and 47 present the FR data for the
accelerometer x, y, and z axes, respectively.
Frequency Response: Accel. X-Axis Versus Load Cell Avg=16100m
12.5m/div
0 0 160 Hz/div 1.6k
Figure 45. Frequency Response for the Ratio Calibration of the Accelerometer X-Axis

54
Frequency Response: Accel. Y-Axis Versus Load Cell Avg=16100m
12.5m/div
0 0 160 Hz/div 1.6k
Figure 46. Frequency Response for the Ratio Calibration of the Accelerometer Y-Axis
Frequency Response: Accel. Z-Axis Versus Load Cell Avg=16100m
12.5m/div
0 0 160 Hz/div 1.6k
Figure 47. Frequency Response for the Ratio Calibration of the Accelerometer Z-Axis
The vertical axes of Figs. 45, 46, and 47 are dimensionless due to the voltage ratio; the
vertical axes are also set in milli-divisions. The coherence plots (provided in Appendix D,
Figs. D1 to D3) for the ratio calibration of each axis are close to 1 over the entire frequency
range. The high coherence indicates a valid calibration. From the FR plots in Figs. 45,
46, and 47, the ratio for the accelerometer x-axis is 0.0461, the ratio for the accelerometer
y-axis is 0.0409, and the ratio for the accelerometer z-axis is 0.0354. Since the
amplification ratio of the transducer signals was set at 1, and the mass of the hanging-
weight/accelerometer combination was 841.8 grams in the calibration tests, Eq. 2.8.1 from
Theory provides the calibration ratios between the load cell and three axes of the
accelerometer. The computed ratios are summarized in Table 3.

55
Table 3. Calibration Ratios for Accelerometer/Load-Cell Pair
Axial Direction Calibration Ratio (kg)x 0.03882y 0.03544z 0.02983
The calibration ratios in Table 3 are used to scale the accelerometer/load-cell FR data in the
GVT. The calibration ratios were not integrated into the tests until the GVT setup was
finalized and actual analysis data was being recorded.
5.2 Preliminary Test Troubleshooting
The following section presents results from the preliminary test troubleshooting of the
GVT. The first section is devoted to the selection of an appropriate suction plate for the
test. The remaining results are primarily from troubleshooting the errors in data that caused
a loss in coherence. These topics include the following: initial test data, ground loops, use
of different 50 lb. shakers, mounting methods for the accelerometer, effect of bad wire
connections, flexure-fixture effects, new-flexure verification tests, control-surface
vibration, amplitude ranging, data resolution, shaker table vibration, low frequency
oscillations, and the use of a 35 lb. shaker.
5.2.1 Selection of Suction Plate
The selection of an appropriate suction plate was one of the first steps toward conducting
the preliminary tests. The suction plate was intended as a means of performing a non-
destructive test. The initial suction plate used in the GVT equipment setup was a plate with
an 8 inch diameter. When initial suction-plate tests were conducted, the larger plate
provided a strong vacuum force that kept the plate firmly mounted on the wing.
Unfortunately, the large diameter of the plate conflicted with the curvature of the wing
surface.
The suction plate, which was made of aluminum, remained fairly rigid and did not deform
to match the wing curvature. The o-ring gasket compressed enough to account for the
mismatch in curvature, but the suction was high enough to cause the wing skin to separate
from the wing spar in order to account for the curvature mismatch; hence, the non-
destructive mounting method turned destructive (Fig. 48).

56
Figure 48. Wing Skin Damage due to Curvature Mismatch between Wingand 8 Inch Suction Plate
To account for the curvature mismatch, the suction plate used for the remainder of the tests
had a 2 inch diameter. The smaller plate conformed better to the surface curvature during
tests, and long-term tests revealed that the smaller plate did not harm the wing surface.
5.2.2 Initial Test Data
After the ratio calibration was complete and the suction plate was selected, the equipment
(electro-magnetic shaker, amplifier, pump, suction plate, cables, aircraft, and free
supports) was assembled in order to conduct some preliminary GVT tests. The initial tests
produced a chain of events that provided some valuable insight into the complexity of
performing an actual GVT. The next several sections will outline the initial results, discuss
the problems encountered, and then progress through the chain of events that led to
resolving each problem.
The initial tests were configured according to section 4.2 of Test Procedure and Setup. For
the initial tests, the shaker was positioned at a location approximately 2 feet from the left
wingtip on the underside of the wing. The accelerometer was placed on the topside of the
wing, close to the region above the shaker attachment point. For the initial test, the DSA
(Dynamic Signal Analyzer) was set for a frequency span of 100 Hz with a resolution of
200 lines and 16 averages. The initial set of GVT data is presented in Figs. 49 and 50 for
the z-axis response. The x-axis and y-axis data is provided in Appendix D (Figs. D4 to
D7).

57
Frequency Response: Accel. Z-Axis Versus Load Cell Avg=16-8
8 dB/div
-72 0 10 Hz/div 100
Figure 49. Z-Axis Frequency Response for First Ground Vibration Test
Coherence: Accel. Z-Axis Versus Load Cell Avg=161
125m/div
0 0 10 Hz/div 100
Figure 50. Z-Axis Coherence for First Ground Vibration Test
The coherence data in Fig. 50 shows that the FR data in Fig. 49 was not all produced by
the input force provided by the shaker. The coherence roll off after 50 Hz was peculiar and
the many spikes within the higher-coherence region between 10 Hz and 50 Hz were also
unexplained. This initial set of data showed that there was some problem in the GVT
equipment that had to be resolved before actual testing could begin. The first step in the
troubleshooting process involved the use of the Tektronix 561A 4-channel oscilloscope in
the data loop, as mentioned in the Test Procedure section.
Once the 4-channel oscilloscope was placed in the data loop, the output signals from the
load cell and accelerometer could be monitored in real time. However, when the aircraft
was subjected to the burst-random excitation, the accelerometer output was quite small and
could not be scaled in well to determine the quality of the signal. This result was originally
disregarded because results from the DSA showed that the test was now exhibiting
exceptional coherence, as shown for the z-axis in Fig. 51.

58
Coherence: Accel. Z-Axis Versus Load Cell Avg=161
125m/div
0 0 10 Hz/div 100
Figure 51. Z-Axis Coherence With 4-Channel Scope in Data Loop
The FR for the z-axis, along with the coherence and FR for the x-axis and y-axis is
presented in Appendix D (Figs D8 to D12). Even though the data coherence was
exceptional in Fig. 51, the presence of the spike at 60 Hz was peculiar. The 60 Hz spike
provided the immediate impression that something was wrong with the data, especially
since standard plug sockets have an alternating current of 60 Hz frequency. A simple
check on the data was performed by removing the 4-channel oscilloscope from the data
loop. The results of the GVT matched those presented in Figs. 49 and 50. The 4-channel
oscilloscope was obviously conditioning or correlating the signals prior to their input into
the DSA. The reason for the problem was due to ground loops, which will be explained in
the following section.
5.2.3 Ground Loops
The spike at 60 Hz, which appeared in the data taken while the 4-channel oscilloscope was
in the data loop, pointed to a phenomenon known as ground looping. Prior to learning
about ground loops, several tests were run to determine the source of the 60 Hz spike. In
order to be systematic in the approach to resolving the problem, the first step involved
disconnecting the 4-channel oscilloscope, load cell, and accelerometer and taking FR and
Coherence measurements between the DSA output and the amplifier output. This first step
was beneficial because the sources of the spike were immediately discovered. The
following section presents the configurations and results of the ground loop tests. The
coherence data is shown in this section, and the FR plots for the ground loop tests are
available in Appendix D (Figs D13 to D15).
The DSA source was turned on and the source excitation was set to a random burst signal.
A coherence plot of the amplifier output versus the source input shows a major drop in
coherence at 60 Hz (Fig. 52).

59
1
125m/div
0 0 10 Hz/div 100
Coherence: Amplifier Output Versus Source Input Avg=16
Figure 52. Coherence Plot Showing 60 Hz Spike with the DSA Source On
After the 60 Hz spike was confirmed to exist between the DSA and amplifier, the DSA
source was turned off and data was gathered from the amplifier with no driving signal.
The resulting coherence data is presented in Fig. 53.
1
125m/div
0 0 10 Hz/div 100
Coherence: Amplifier Output Versus Source Input Avg=16
Figure 53. Coherence Plot Showing 60 Hz Spike with the DSA Source Off
The high coherence of Fig. 53 shows that an external source was introducing a 60 Hz noise
signal into the system even with the DSA source turned off. The conclusion was that the
amplifier was somehow contributing noise to the system. A discussion with Frank Wise
[21], the local electrician in Woolrich Laboratories at the University of Texas at Austin,
provided insight about the cause of the 60 Hz noise.
The 60 Hz signal was caused by the phenomenon of ground loops. Ground loops occur
when electronic equipment is connected to uncommon grounding wires. If uncommon
grounds have any voltage potential between their different ground locations, the low
impedance of the dirt or surface they connect into can cause significant current flow.
Additionally, any other high current sources near the location of the grounding points can

60
introduce high magnetic flux to the surrounding system and cause a potential between the
uncommon grounds [21]. The ground-loop phenomenon is definitely apparent in Fig. 53.
The problem was simple to resolve once it was attributed to ground loops. The basic
remedy involved unplugging all electronic components from the uncommon grounds and
plugging into a power strip with a single, common ground. With all electronics running
through a single ground, a coherence plot with the source off reveals no 60 Hz noise
entering through the amplifier (Fig. 54).
1
125m/div
0 0 10 Hz/div 100
Coherence: Amplifier Output Versus Source Input Avg=16
Figure 54. Coherence Plot Showing No Ground Loops with the DSA Source Off
After the problem of ground loops was resolved, preliminary GVT testing continued. In
addition, the amplifier was calibrated in order to ensure that it was producing its rated
outputs. Unfortunately, the responses were still characteristic of the initial data shown in
Figs. 49 and 50. After the ground loops were removed, the next phase of troubleshooting
shifted to the shaker and wires themselves.
5.2.4 Use of Two Different 50 lb. Shakers
For the troubleshooting of the shaker, two identical 50 lb. shakers were tested. The
shakers were labeled simply shaker 1 and shaker 2 to correspond to good and bad,
respectively. The number rating was given after tests were complete and will be justified
with the data presented from testing.
Although all of the data previously presented was obtained by using shaker 1, the shaker
tests were initiated with shaker 2. The analysis for the shaker tests involved determining
the coherence between the load-cell output and the source input. The load cell remained
attached to the aircraft in order to produce an output loading. Figure 55 provides the

61
coherence response of the load cell output to the a burst random input from the DSA; the
FR is presented in Appendix D (Fig. D16).
Coherence: Load Cell Versus Source - Shaker 2 Avg=161
125m/div
0 0 10 Hz/div 100
Figure 55. Coherence Rolloff at 50 Hz for Shaker 2
The coherence results in Fig. 55 indicate that shaker 2 produces an amplitude rolloff after
50 Hz. In order to discount the possibility that the amplifier was introducing noise, the
DSA source was turned off and the amplifier signal was again checked in relation to the
source input. The results matched Fig. 54 , indicating that no high frequency noise was
being introduced to the system by the amplifier. The conclusion was that shaker 2 had
some sort of damage that caused it to attenuate the frequency content after 50 Hz. After this
realization, shaker 1 was reinstalled.
Similar FR and coherence measurements were taken between the load cell and source input
for shaker 1. This time, the coherence between the two signals was very high (Fig. 56).
The FR data is provided in Appendix D (Fig. D17).
1
125m/div
0 0 10 Hz/div 100
Coherence: Load Cell Versus Source - Shaker 1 Avg=16
Figure 56. High Coherence for Shaker 1

62
The results of Fig. 56 further reduced the possible list of problems in the GVT data. Since
shaker 1 was the shaker used in all previous tests, the problems were arising from another
source.
5.2.5 Accelerometer Mounting Methods and Bad Wire Connections
With the original shaker reintegrated in the GVT setup, the troubleshooting shifted to the
mounting method for the accelerometer. The goal of this test was to determine if the wax
supplied by Kistler was causing some of the errors in the accelerometer data. For the test,
the shaker, flexure fixture, and load cell were disconnected from the aircraft. An aluminum
weight with a mass of 29.2 grams was attached to the top of the load cell. Wax was then
applied to the accelerometer, and the accelerometer was pressed to the top of the aluminum
weight with the z-axis pointing upward. To test the signals in real time, a new oscilloscope
was connected into the data loop. The new scope was a DSS 6520A 2-channel
oscilloscope. With the new scope in the loop, the individual signals from the accelerometer
axes and the load cell were monitored; the oscilloscope was a manual instrument that could
not store data, so no data is available for the results in this section.
The input provided to the shaker was a continuous sine wave of 200 Hz frequency. In this
configuration, the responses of the accelerometer z-axis were not readable. However, the
load cell response was a distinct sinusoid. This result indicated that either the accelerometer
was broken or the method of applying the wax was causing a problem. The actual problem
was due to both causes. The wax problem was discovered by depressing the accelerometer
against the wax with a higher pressure in order to squeeze out more of the wax. The result
produced readable data; however, the data was irregularly noisy.
The source of the noise was determined when the wire connections were checked on the 2-
channel oscilloscope. The wires were found to be very sensitive to movement. Any
motion of the wires produced significant changes in the amplitude of the accelerometer and
load-cell responses. To remedy this problem, all connections were sprayed with contact
cleaner, several of the BNC cables were replaced with new cables, and several of the
connectors were also replaced. The new cables produced better output, but the
accelerometer remained noisy and eventually the z-axis stopped sending data. An
inspection of the wires connected directly to the accelerometer revealed that the connections
inside the epoxy wire encasement were somehow damaged. Movement of the wires
produced significant data spikes.

63
The accelerometer was repaired by Frank Wise and the data tests were run again. With the
repaired accelerometer, the data was visible and the output from the accelerometer had no
apparent noise. With the problems in the data transmission finally repaired, the instruments
were placed back on the aircraft and the GVT continued. Unfortunately, the continued
GVT tests resulted in more problems. The coherence of the data was better, but still
needed much improvement before actual test data was taken.
5.2.6 Flexure-Fixture Effects
The data obtained in the continued GVT had considerably better coherence than that of the
initial tests. In fact, the only significant problem was a large drop in coherence from 10 Hz
to 35 Hz (Fig. 57). The FR data is shown in Appendix D (Fig. D18).
10 2.5 Hz/div 35
1
125m/div
0
Coherence: Accel. Z-Axis Versus Load Cell Avg=18
Figure 57. Poor Coherence Centered around 25 Hz with Original Flexure Fixture
The troubleshooting for the coherence drop was centered around the audible buzz coming
from the flexure of the current flexure fixture. The buzz resulted from transverse vibration
of the long, hollow tube of the original flexure fixture (Fig. 58).

64
Figure 58. Original Flexure Fixture and Original Pump Hose
In order to determine the original flexure’s contribution to the drop in coherence, a new,
short flexure was attached to the shaker, and the shaker was supported on a table so that the
suction plate could reach the wing. In addition, the original pump hose was replaced with a
thinner hose in order to decrease the amount of torque induced from its weight. Before the
original flexure was removed, the coherence was tested with the new pump hose, but no
significant change was noticed. Hence, the flexure was considered the primary possibility
for the loss of coherence. The shorter flexure fixture and new hose are shown in Fig. 59.
Figure 59. New Flexure Fixture and New Pump Hose

65
A coherence plot with the short flexure and new pump hose is shown in Fig. 60; the FR
data appears in Appendix D (Fig. D19).
Coherence: Accel. Z-Axis Versus Load Cell Avg=161
125m/div
0 10 2.5 Hz/div 35
Figure 60. Improved Coherence around 25 Hz with New Flexure Fixture
The resolution of the plot in Fig. 60 was reduced due to the long computation time
associated with the high resolution produced in Fig. 57. However, a comparison of the
two coherence plots still produces some noticeable results. The most noticeable differences
between the coherence plots of Figs. 57 and 60 is the dramatic increase in the coherence for
the short flexure around 16 Hz and 22.5 Hz. These results showed some definite
improvement, but the problem with the coherence drop was still unresolved.
5.2.7 New-Flexure Verification Tests
Before troubleshooting the problem in the coherence, a test was performed to verify that the
accelerometer was still sending good data and that the new, short flexure was not inducing
any vibrations. For the test, the 29.2 gram aluminum mass was placed on top of the short
flexure and the accelerometer remounted to the mass. This time, instead of using only the
2-channel oscilloscope to monitor data, the data was recorded by the DSA and a plot of the
coherence was obtained.
The results showed great coherence between the load cell and accelerometer. A further test
of the wax showed that the coherence of the z-axis was fairly unaffected when the
accelerometer was only lightly attached (the wax was not completely depressed) versus
when it was firmly attached (the wax was fully depressed). However, when the wax was
only slightly depressed, the x- and y-axes exhibited a significant drop in coherence at
several frequencies because they picked up additional motion due to the swaying of the
unconstrained flexure. Figs. 61 and 62 provide a comparison of the y-axis coherence

66
between the flushly mounted and lightly mounted accelerometer. The remaining coherence
data is presented in Appendix D (Figs. D20 to D23).
Coherence: Accel. Y-Axis Versus Load Cell Avg=161
125m/div
0 0 20 Hz/div 200
Figure 61. Drop in Y-Axis Coherence Due to Light Attachment of the Accelerometer
Coherence: Accel. Y-Axis Versus Load Cell Avg=161
125m/div
0 0 20 Hz/div 200
Figure 62. Improvement in Y-Axis Coherence Due to Firm Attachment ofthe Accelerometer
The conclusion from these tests was that the accelerometer must be flushly mounted in
order to obtain the best data coherence; however, the continued present of the coherence
drop around 25 Hz was still unexplainable until the tests of the next section were
conducted.
5.2.8 Nonlinear Vibration of Control Surfaces
After the problems with the wire connections, flexure, and accelerometer were resolved,
the new shaker and accelerometer were attached back to the wing to initiate further testing.
The good coherence from the flexure-fixture test indicated that the instruments were
working properly so good results from the aircraft were expected. However, the FR still
contained bad coherence and significant noise so some time was spend rethinking the GVT
and determining potential sources of error. A discussion with Dr. Roy Craig [22], as well

67
as additional reading from [7] provided much insight into the effect of nonlinear responses
and DSA settings on the FR and Coherence of the signal.
During the GVT, nonlinear vibration was audible within the structure; the vibration was
due to the control surfaces. Even though the control stick for the control surfaces had been
constrained, the looseness of the hinge joints caused a high frequency buzz of the control
surface. The vibration was stopped through the addition of rubber gaskets at points along
the control surfaces of the wing and tail, as shown in Fig. 27 of the Test Procedure and
Setup section.
The addition of the rubber gaskets provided a marginal increase in coherence, but did not
result in a major improvement over previous data. The gain of the amplifier was usually set
low enough to avoid exciting the nonlinear vibration of the control surfaces. However, the
addition of the extra constraints helped to ensure that the nonlinear vibration would not be
activated.
5.2.9 Amplitude Half-Ranging
Additional refinement to the testing was accomplished through the use of amplitude half-
ranging, which is presented in section 2.6.3 of Theory. The instantaneous time signal of
the load-cell response and the response of each of the accelerometer axes was examined to
determine the peak-to-peak amplitude of the time-domain signals. The amplitude range of
the DSA was set to each measurement’s peak-to-peak value in order to optimize the analog-
to-digital conversion as discussed in Theory. The load cell was set to an amplitude range
of 0.8 mV while the accelerometers were set to an amplitude range of 0.4 mV. The
instantaneous time signals are provided in Appendix D (Figs. D30 to D33); the signals
appear bit-mapped due to the small scale of the signal and lack of data resolution.
The addition of amplitude half-ranging provided a large increase in coherence, as
demonstrated through a comparison between Figs. 63 and 64.

68
Coherence: Accel. Z-Axis Versus Load Cell Avg=161
125m/div
0 0 10 Hz/div 100
Figure 63. Z-Axis Coherence Prior to the Inclusion of Amplitude Half-Ranging
Coherence: Accel. Z-Axis Versus Load Cell Avg=161
125m/div
0 0 10 Hz/div 100
Figure 64. Improved Z-Axis Coherence Due to the Inclusion of Amplitude Half-Ranging
The coherence for the remaining coordinate axes, as well as the FR for the z-axis are
included in Appendix D (Figs. D24 to D29). The plots are shown as a comparison before
and after amplitude half-ranging was initiated. All of the coherence plots show
improvements due to the use of amplitude half-ranging in the DSA. The instantaneous time
signals used to determine the range for amplitude half-ranging are also included in
Appendix D (Figs. D30 to D33).
One important aspect to remember is that the amplitude ranging changes at every point on
the surface of the aircraft due to the different amplitudes of the mode shapes at different
locations. Additionally, if the frequency range or amplifier gain are changed, the shaker
output characteristics also change and the amplitude range must be reset in order to
incorporate the benefits of amplitude half-ranging.

69
5.2.10 Lack of Frequency Response Resolution
The addition of amplitude half-ranging to the preliminary tests provided major
improvements in the data coherence. Figure 65 shows the improvements in coherence for
data taken with the accelerometer directly over the load cell on a wing rib/spar junction.
Coherence: Accel. Z-Axis Versus Load Cell Avg=161
125m/div
0 0 10 Hz/div 100
Figure 65. High Coherence Above 10 Hz for Load Cell and Accelerometerat Wing Rib/Spar Junction
At the wing rib/spar junction, the coherence of the signal is near 1, except for frequencies
below 10 Hz. The FR data associated with the high coherence has resonant peaks (Fig.
66), but the peaks do not exhibit well defined spikes.
Frequency Response: Accel. Z-Axis Versus Load Cell Avg=165
8 dB/div
-59 0 10 Hz/div 100
Figure 66. Resonant Peaks Apparent in Frequency Response of Load Celland Accelerometer at Wing Rib/Spar Junction
The coherence drops in Fig. 65 occur at FR values with low signal-to-noise ratios, as seen
in a comparison between Figs. 65 and 66. These low values exist in valleys of the FR and
represent areas where noise can easily contaminate measurements and cause a loss in
coherence.

70
The high coherence of the data in Figs. 65 and 66 indicates a valid frequency response over
the range of 10 Hz to 100 Hz; however, the lack of distinct spikes at the resonant peaks
indicated that a problem was still present in the testing. After tests were run with higher FR
resolution, no improvements were noticed, and additional tests focused on determining the
cause of the apparent loss in resolution. In addition, the coherence of data taken at the tail
of the aircraft was poor (Fig. 67); the FR data is shown in Appendix D (Fig. D34).
Coherence: Accel. Z-Axis Versus Load Cell Avg=161
125m/div
0 0 20 Hz/div 200
Figure 67. Loss in Coherence at the Tail of the Star-Lite
Several potential sources of error still existed that could have caused the lack of distinct
peaks in the FR (Fig. 66), the poor coherence in the tail (Fig. 67), as well as the sever drop
in coherence in the first valley of the FR (Fig. 65). The most apparent sources for potential
error included vibration of the shaker table and a low frequency oscillation that was
sometimes noticed in the accelerometer time signal. Figure 68 displays an example of the
low frequency oscillation found in the time domain signal of the accelerometer.
Instantaneous Time: Accelerometer X-Axis2m
0.5m/div
0 0 0.8 sec/div 8
Figure 68. Low Frequency Vibration Apparent in Instantaneous Time Signal fromAccelerometer X-Axis

71
The instantaneous time signal in Fig. 68 shows a low frequency vibration over the time
period of the signal. To verify that the vibration was not due to an anomaly in one of the
accelerometer axes, the other directions were examined as well (Data in Appendix D, Figs.
D35 and D36). All three axes exhibited similar low frequency oscillations, and subsequent
tests exhibited a repeatable phenomenon. At the time, the low frequency oscillations were
unexplainable so the next tests focused on the possibility of shaker table vibration.
5.2.11 Potential Shaker Table Vibration
The possibility of table vibration was investigated as a potential cause of the severe
coherence drop at 7.5 Hz in Fig. 65. The 50 lb. shaker was mounted on top of a table that
was constrained only with lead shot placed on the table alongside the shaker. In order to
test the possibility of table resonance, the shaker was placed back on the ground and the
original, long flexure was reattached.
The original flexure contained lateral vibration that affected the 10 Hz to 35 Hz frequency
range (Fig. 57) so lead shot fingers were wrapped around the long flexure to attempt to
dampen out the vibration. Prior to wrapping the fingers around the long flexure, the FR
was taken to reestablish a baseline FR measurement for comparison of the FR with the lead
shot fingers. Figures 69 and 70 display the new baseline FR and coherence, respectively.
Frequency Response: Accel. Z-Axis Versus Load Cell Avg=164
10 dB/div
-76 0 20 Hz/div 200
Figure 69. Baseline Frequency Response with the Long Flexure

72
Coherence: Accel. Z-Axis Versus Load Cell Avg=161
125m/div
0 0 20 Hz/div 200
Figure 70. Baseline Coherence with the Long Flexure
The data in Figs. 69 and 70 was taken over a frequency range of 200 Hz since the flexure
verification tests of section 5.2.7 were taken over a range of 200 Hz. A comparison of the
resolution in Fig. 66 and the resolution in Fig. 69 shows that the long flexure provided the
distinct peaks expected in the FR of the structure. However, the coherence in Fig. 70 was
lower than that of Fig. 65 over the frequency range of 0 to 30 Hz. The drop in coherence
was suspected to have been produced by the long flexure’s transverse vibration.
The first test with the lead shot fingers used four fingers wrapped around the long flexure.
Figures 71 and 72 display the results of these tests.
Frequency Response: Accel. Z-Axis Versus Load Cell Avg=164
10 dB/div
-76 0 20 Hz/div 200
Figure 71. Frequency Response with Four Lead Shot FingersWrapped Around the Long Flexure

73
Coherence: Accel. Z-Axis Versus Load Cell Avg=161
125m/div
0 0 20 Hz/div 200
Figure 72. Coherence with Four Lead Shot Fingers WrappedAround the Long Flexure
A comparison of the FR’s in 69 and 71 shows a similar response for the structure;
however, the addition of the lead shot fingers caused a further drop in the coherence of the
FR data with the long flexure (Compare Figs. 70 and 72). The addition of four lead shot
fingers seemed to increase the lateral vibration of the long flexure so an additional test was
conducted by using only one lead shot finger. The results of the test were almost identical
to those of the tests with four lead shot fingers but with a marginal improvement in the
coherence (The FR and coherence data are available in Appendix D, Figs. D43 and D44).
The coherence with one lead shot finger was still worse than the baseline coherence in Fig.
70 so the lead shot fingers were determined to be ineffective in reducing the vibrations.
The lower coherence of the long flexure was undesirable so the short flexure was placed
back on the shaker, and the shaker was mounted back on top of the table. The short
flexure had lower resolution in the FR data, so additional tests were required to determine a
method of increasing the resolution and producing the characteristic peaks in the FR.
However, prior to removing the long flexure, some tests were conducted in order to isolate
the problem of the low frequency oscillations in the accelerometer data.
5.2.12 Low Frequency Oscillations in Accelerometer Measurements
The cause of the low frequency vibrations was unknown, but several possibilities were
investigated. The first step was to increase the number of control surface constraints in
case some nonlinear vibration of the surfaces was affecting the accelerometer data. When
nothing changed, the canopy of the aircraft was constrained with duct tape to damp out any
potential canopy vibration. Neither of these steps offered any insight into the low
frequency oscillations.

74
A vent centered above the aircraft was the next possibility considered as the cause of the
oscillations. In order to test this possibility, the duct was sealed with a plastic bag as
mentioned in section 4.3. Tests immediately following the sealing of the duct showed no
low frequency oscillations in the signal, and the problem was thought to have been solved.
However, the low frequency oscillations eventually returned, as was the case earlier when
the oscillations would randomly appear in the data.
An attempt to remove any FR contamination by the low frequency oscillations produced an
uncommon type of signal aliasing. Most cases of signal aliasing occur when the highest
frequency component of a signal is not adequately sampled. However, a second form of
aliasing occurs when the lowest frequency component in a signal is not adequately
resolved. The low frequency oscillation in Fig. 68 has an approximate frequency of 0.125
Hz. Since the shaker signal rolls off below 5 Hz, the FR signal was assumed to only be
needed for a frequency range above 5 Hz. Thus, the FR was shifted to a range of 5 Hz to
55 Hz for a test. Unfortunately, the assumption was invalid because the frequency content
below 5 Hz in the accelerometer signal was aliased into the digital reproduction of the time
signal (Fig. 73).
Instantaneous Time: Z-Axis Avg=160.6m
0.15 mV/div
-0.6m 0 1.6 sec/div 16
Fig. 73. Signal Aliasing Due to Lack of Proper Sampling Below 5 Hz
The aliasing of the low frequency oscillation is apparent between 8 and 16 seconds in the
time signal. The excitation input into the aircraft occurred during the first 8 sec. of the 16
sec. sample period, and the accelerometer signal normally decayed to zero after 8 seconds.
Instead, the aliasing caused a buzz of the time signal after 8 sec. The buzz disappeared
when the FR was run for the normal 0 Hz to 50 Hz range.
The results in Fig. 73 indicated that the FR had to be taken over a frequency range that
started at 0 Hz. At this point, the cause of the low frequency oscillation was thought to

75
possibly be due to low-frequency building vibration. However, before investigating this
possibility, the frequency range of the accelerometer was referenced from its data sheet [19]
and found to be 1 Hz to 10 kHz. The discovery that the frequency range of the
accelerometer rolls off below 1 Hz indicated that the low frequency oscillation could not
have been due to a physical vibration. The oscillation was determined to most likely come
from some form of electronic hum between the electrical equipment. Since the low
frequency oscillation was contained within the sample period of 16 seconds, the low
frequency oscillation of 0.125 Hz was adequately sampled over the sample period and
would only affect the FR at frequencies around 0.125 Hz. Fortunately, since the shaker
rolls off below 5 Hz, the data below 5 Hz was essentially invalid and was not used in the
computational analysis.
The realization that the low frequency oscillation would be of little harm to the data allowed
the GVT troubleshooting to continue. The short flexure was attached back onto the shaker,
and the shaker was placed back on the table. In later tests, the low frequency oscillations
occasionally appeared in the accelerometer signal but generally had a period accurately
sampled within the sample period (Fig. 74).
Instantaneous Time: Z-Axis Avg=1650m
12.5 mV/div
-50m 0 1.6 sec/div 16
Figure 74. Low Frequency Oscillations Occasionally Appear in Data
5.2.13 Increase Frequency Response Resolution and the 35 lb. Shaker
The reconfiguration of the excitation system with the short flexure and table for the shaker
required additional tests to improve the lack of distinct peaks in the FR shown in Fig. 66.
The problem with the resolution was thought to be due to the low amplifier gain that was
associated with the use of the 50 lb. shaker. The amplifier gain had to be kept low so that
the 50 lb. shaker would not overload the load cell and accelerometer. 3MAAP felt that if
the amplitude of the input vibration could be increased, the FR resolution would improve.

76
The 50 lb. shaker was removed from the excitation system and a newly acquired 35 lb.
shaker was assembled and placed into the excitation setup. Preliminary tests with the 35
lb. shaker showed that the amplifier gain could be significantly increased without
overloading the accelerometer or the load cell. The increased amplifier gain provided an
increased displacement of the flexure fixture that resulted in an increased vibration of the
wing and aircraft. In addition to the increased amplitude of vibration, the resolution of the
testing was set to 1600 lines in the frequency domain and the excitation burst length was set
to 75% of the 16 second sampling period. Most of the preliminary GVT data was taken
with a resolution of 400 lines, a sample period of only 4 seconds, and a 50% burst length.
Figures 75 and 76 show a comparison of the changes made to the sample period and burst
length used in the test, as well as the increased magnitude of the response due to the 35 lb.
shaker.
Instantaneous Time: Z-Axis Avg=166.31m
1.577mV/div
-6.31m 0 0.4 sec/div 4
Figure 75. Short Excitation Burst and Sample Period Associated with PreliminaryGVT Data and the 50 lb. Shaker
Instantaneous Time: Z-Axis Avg=1612.59m
3.147mV/div
-12.59m 0 1.6 sec/div 16
Figure 76. Long Excitation Burst and Sample Period Associated with the 35 lb. Shaker
The increase in gain from the 35 lb. shaker is apparent when comparing Fig. 76 with Fig.
75. The changes made to the test setup provided increased data resolution in the FR of the

77
Star-Lite as seen in a comparison of the 50 lb. shaker FR with the 35 lb. shaker FR (Figs.
77 and 78).
Frequency Response: Accel. Z-Axis Versus Load Cell Avg=165
8 dB/div
-59 0 10 Hz/div 100
Figure 77. Lack of Distinct Peaks in the Frequency Response Associated with theShort Flexure and the 50 lb. Shaker
Frequency Response: Accel. Z-Axis Versus Load Cell Avg=16-6
10 dB/div
-86 0 10 Hz/div 100
Figure 78. Presence of Distinct Peaks in the Frequency Response Associated withthe Short Flexure and the 35 lb. Shaker
When the 35 lb. shaker was used in the GVT, along with the changes in the sampling
period and burst length, the FR exhibited the expected peaks (Fig. 78). The coherence of
the signal even improved with the use of the 35 lb. shaker as seen in a comparison with the
50 lb. shaker (Figs. 79 and 80). Both sets of data still maintained a drop in coherence at
7.5 Hz where a low signal-to-noise ratio existed in the FR (Figs. 77 and 78)

78
Coherence: Accel. Z-Axis Versus Load Cell Avg=161
125m/div
0 0 10 Hz/div 100
Figure 79. Coherence Associated with the Short Flexure and 50 lb. Shaker
Coherence: Accel. Z-Axis Versus Load Cell Avg=161
125m/div
0 0 10 Hz/div 100
Figure 80. Coherence Associated with the Short Flexure and 35 lb. Shaker
The addition of the 35 lb. shaker, as well as the changes to the FR measurements of the
vibration data provided vast improvements in the GVT results. In addition, the coherence
of the entire aircraft improved, as can be seen with a comparison of the tail coherence
before (Fig. 67) and after (Fig. 81) the addition of the 35 lb. shaker.
Coherence: Accel. Z-Axis Versus Load Cell Avg=161
125m/div
0 0 10 Hz/div 100
Figure 81. Improved Coherence of the Tail Associated with the 35 lb. Shaker
The coherence of the tail is significantly higher with the 35 lb. shaker and longer excitation
burst. In fact, the drops in coherence in Fig. 81 only occur in valleys of the FR for the tail

79
(Fig. 82). Additionally, the coherence of the tail at the resonant peaks is close to 1 so the
data is valid at the natural frequencies.
Frequency Response: Accel. Z-Axis Versus Load Cell Avg=1634
12.5 dB/div
-66 0 10 Hz/div 100
Figure 82. Valleys in the Frequency Response Cause a Drop in the Coherence
The increased resolution and better coherence allowed for the finalization of the GVT setup
and initiation of final data collection.
5.3 Measurement and Theory Validation
This section includes results form tests associated with theory and measurement methods
suggested in the Theory section of the report. Topics include the coherence function, rigid-
body modes, excitation frequency range, discrete-measurement-point layout, Maxwell’s
Reciprocity Theorem, and integration of calibration ratios.
5.3.1 Coherence
During the troubleshooting portion of the project, 3MAAP took the time to validate the
theory behind the coherence measurement. Since coherence measures the power in the
output signal that is directly related to the power in the input signal, a simple test involved
disconnecting the wire from the load cell. With the wire disconnected, a coherence
measurement (Fig. 83) was taken between the accelerometer output from the wing surface
and the voltage reading from the disconnected load-cell cable.

80
Coherence: Accel. Z-Axis Versus Load Cell Avg=161
125m/div
0 0 10 Hz/div 100
Figure 83. No Coherence Between Accelerometer Output and DisconnectedLoad-Cell Wire
The coherence close to zero in Fig. 83 verifies that the coherence measurement between the
input and the output responses is a valid and useful relationship. Since the load cell was
disconnected, the expected value for the coherence was zero. The highest spike in
coherence was close to 82 Hz with a coherence measure of approximately 0.3. These
spikes, although not due to any input excitation to the system by the DSA, may have been
caused by an excitation from the shaker due to some minute voltage potentials produced by
the amplifier. The signals might even be indicative of noise characteristics of the local test
environment such as building movement, air circulation, or even high current sources
producing large magnetic fluxes.
Once the data refinement is complete, and as many of the sources of error are removed, a
second test of the accelerometer/load-cell coherence might show some interesting results.
Specifically, with the shaker input disconnected so that no shaker motion occurs, the
responses of the accelerometer and load cell can be recorded for the motion of the aircraft
due to building motion or other environmental factors. Increases in coherence without any
voltage input through the shaker may provide a means for characterizing and removing
environmental noise from the test data.
5.3.2 Rigid-Body Modes
The innertube constraints cause the rigid-body modes to occur at non-zero frequencies.
3MAAP provided a manual excitation input to the Star-Lite aircraft, and the power
spectrum of the accelerometer was recorded by the DSA in order to determine the excitation
frequencies of the rigid-body modes.

81
With the accelerometer placed at an arbitrary location on the surface of the aircraft, the
power spectrum revealed amplitude spikes at low frequencies due to the rigid body
translation and rotation of the Star-Lite. Table 4 summarizes the rigid-body frequencies of
the freely-supported Star-Lite aircraft. The individual Power Spectrum plots of each rigid-
body mode are presented in Appendix D (Figs D37 to D42); the plots are shown for the
accelerometer axes that presented the most distinct frequency spikes.
Table 4. Non-Zero Frequencies of Rigid-Body Modes Due to Innertube Constraints
Rigid-Body Mode Frequency (Hz)Longitudinal Translation (x) 1.6875
Lateral Translation (y) 1.5625Vertical Translation (z) 3.0625
Roll 1.1875Pitch 1.1250Yaw 1.0000
As seen in Table 4, all the non-zero rigid-body frequencies are close to 1 Hz except for the
vertical translation, which is close to 3 Hz. Modal analysis information in [7] recommends
the highest rigid-body mode be less than 1/10 the first flexible mode. From a view of the
FR in Fig. 78, the first flexible mode appears around 10.5 Hz. All rigid-body modes,
except the vertical-translation mode, satisfy the free-support recommendation of 1/10 the
first flexible frequency. The FAA requirement for modal testing states the highest rigid-
body frequency should be 1/4 of the lowest flexible mode [9]. Since the first flexible mode
is close to 10.5 Hz, the vertical-translation mode does not quite satisfy the FAA
requirements. In order to reduce the frequency of the vertical-translation mode, a new form
of landing gear support would have been required. The error was determined to be small
enough that the supports did not need to be changed, and the GVT was continued.
5.3.3 Selection of the Excitation Frequency Range for Testing
The excitation frequency range for a GVT involves the bandwidth of frequencies used to
calculate the FR of the test structure. As stated in section 2.4.2 of the Theory section, the
excitation frequency range is found by vibrating the structure at several input excitation
locations and measuring the response at several locations in order to obtain the highest
significant frequencies in a structure. Prior to examining which frequencies were
significant in the FR, a test of structural dynamics theory was performed to verify that a
continuous system contains an infinite number of modes. To perform this test, the Star-
Lite was vibrated over a frequency range of 1600 Hz (Fig 84).

82
Frequency Response: Accel. Z-Axis Versus Load Cell Avg=16
0 160 Hz/div 1.6k
-2
8 dB/div
-66
Figure 84. Frequency Response of Star-Lite for a 0 Hz to 1600 Hz BurstRandom Excitation
The 1600 Hz FR shows the infinite number of natural frequencies associated with a
continuous structure. The coherence of the data indicated that the FR was produced by the
input force and was valid over a range of approximately 80 Hz to 1600 Hz (Fig. 85).
Coherence: Accel. Z-Axis Versus Load Cell Avg=161
125m/div
0 0 160 Hz/div 1.6k
Figure 85. High Coherence of Response Data for a 0 Hz to 1600 HzFrequency Range
The drop in coherence below 80 Hz was most likely due to a decrease in lower-frequency
resolution due to the large 1600 Hz frequency span. In order to accurately resolve the
lower frequencies, a smaller bandwidth had to be examined.
The frequency bandwidth chosen to view the significant excitation frequency range was 0
Hz to 200 Hz. The 200 Hz range was chosen because it was used in some of the
preliminary test cases and would provide a decent view of the lower frequency range. For
these tests, the frequency resolution was set to 1600 lines or 0.125 Hz. Figure 86 shows
the FR over the 200 Hz range and Fig. 87 displays the associated coherence.

83
Frequency Response: Accel. Z-Axis Versus Load Cell Avg=16
0 20 Hz/div 200
-16
8 dB/div
-80
Figure 86. Frequency Response over 200 Hz Frequency Bandwidth
Coherence: Accel. Z-Axis Versus Load Cell Avg=161
125m/div
0 0 20 Hz/div 200
Figure 87. Coherence for Frequency Response over 200 Hz Frequency Bandwidth
The coherence is close to 1 over the entire span of 200 Hz in Fig. 87, thus the FR data in
Fig. 86 is valid. The most distinct peaks in the FR occur within the first 50 Hz of the data.
After 50 Hz, the peaks are less distinct. The disappearance of distinct peaks is most likely
due to the natural damping of the structure that tends to attenuate higher frequency
vibration. In addition, the equipment may not be capable of producing high frequency
resolution above 50 Hz.
The GVT test performed on a different Star-Lite in 1989 selected a bandwidth of 50 Hz [2].
The previous GVT used the same amplifier and the same brand of shaker. The previous
GVT did not indicate why a 50 Hz bandwidth was chosen, but the choice may have been
due to a similar result in the FR data. In order to provide a slightly higher bandwidth for
modal analysis, 3MAAP decided to perform the current GVT over a span of 100 Hz. The
larger span would allow comparison to previous GVT data plus allow the analysis of some
higher frequency modes.

84
The position for the input force was also decided when the frequency span was selected.
The position had to be set such that the input excitation would adequately excite all the
modes within the 0 Hz to 100 Hz bandwidth. The input location was selected at the fourth
rib-spar junction from the outboard edge of the left wing. To find this location, the input
force was positioned at several rib-spar junctions until a position was found that excited all
of the frequencies. The accelerometer was also moved to several different locations for
each input excitation in order to look at the different peaks in the FR.
Figure 88 shows the FR of one of the locations (third rib-spar junction) tested as the
excitation position, and Fig. 89 shows the FR of the position selected as the GVT
excitation location (the fourth rib-spar junction). The coherence data is provided in
Appendix D (Figs. D45 and D46).
Frequency Response: Accel. Z-Axis Versus Load Cell Avg=16
0 10 Hz/div 100
-5
8 dB/div
-85
Figure 88. Frequency Response at the Third Rib-Spar Junction
Frequency Response: Accel. Z-Axis Versus Load Cell Avg=16
0 10 Hz/div 100
-13
8 dB/div
-93
Figure 89. Frequency Response at the Fourth Rib-Spar Junction Chosen asthe GVT Excitation Input Location
A comparison of Figs. 88 and 89 shows a similar response from 0 Hz to 40 Hz.
However, Fig. 89 displays a more distinguished peak at 50 Hz than is seen in Fig. 88. In

85
addition, a small peak is seen at 80 Hz in Fig. 89, whereas no peak is seen in the FR of
Fig. 88. The fourth rib-spar junction was selected as the input excitation location due to the
additional peaks appearing in the FR data. The data indicated that the third rib-spar junction
was a node for the 80 Hz natural frequency, and excitation at this location would not have
excited the associated mode.
5.3.4 Discrete Measurement Point Layout
The discrete measurement point layout was determined through the use of the method
outlined in section 2.4.3 of the Theory section. The shaker excitation input was set at the
location determined in section 5.3.3 (the fourth rib-spar junction from the outboard tip of
the left wing). The accelerometer was then moved in 8 inch increments along the span-
wise direction of both the aileron and spar of the left wing in order to obtain approximate
mode shapes of each surface.
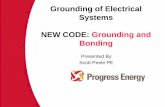
The highest apparent natural frequency in the FR data appeared to be around 92.43 Hz, as
indicated by an inspection of Fig. 89. The amplitudes of the FR at 92.43 Hz were recorded
and plot versus the distance from the root of the wing in order to obtain a first-cut
approximation of the wing mode shape. Figure 90 shows the approximate mode shape of
the main spar at a frequency of 92.43 Hz.
Left Wing Mode at 92.43 Hz
00.20.40.60.8
1
0 20 40 60 80 100 120Distance from wing root (in)
FR A
mpl
itude
s (V
a/V
f)
Figure 90. Approximate Mode Shape for the Left-Wing Spar at a Frequency of 92.43 Hz
The blue data points correspond to measurement values along the spar of the wing. The
black curve is a curve fit of the data. The measurements were repeated along the left-wing
aileron in order to compare the vibration of the control surfaces to those of the wing
surface. Figure 91 displays the approximate mode shape of the aileron at 92.43 Hz.

86
Left Wing-Control Surface Mode at 92.43 Hz
00.20.40.60.8
11.2
0 20 40 60 80 100Distance from wing root (in)
FR A
mpl
itude
(V
a/V
f)
Figure 91. Approximate Mode Shape for the Left Aileron at a Frequency of 92.43 Hz
The approximate mode shapes for the wing and aileron provided information on the
required spacing of the discrete measurement points. One oscillation of the 92.43 Hz mode
shape occurred after approximately 60 inches from the wing root for both the spar and
aileron. A minimum of 4-5 measurement points are suggested across each oscillation,
corresponding to a spacing of 12 to 15 inches per measurement point; however, 3MAAP
decided to keep the lateral distance at 8 inches between each point to correspond with the 8
inch spacing of the ribs. The longitudinal spacing of the measurement points parallel with
the ribs (in the chord-wise direction) was kept under 10 inches to ensure high data
resolution. The spacing of nodes on the elevator and tail were also keep to a maximum
distance of around 8 inches to ensure high data quality.
After the point separation was selected, the Star-Lite was discretized into 248 data points,
and each data point was labeled with the appropriate measurement node number. For
example, the excitation input point at the fourth rib-spar junction from the outboard tip of
the left wing was labeled as node 13. The highest number of node points appeared on the
wings, elevators, and tail of the aircraft. The node point coordinates are available at the end
of Appendix E. The node distance on the fuselage was doubled from 8 in. to 16 in.
because the response was of less interest, and the student edition of I-DEAS would only
allow 250 node points.
5.3.5 Maxwell’s Reciprocity Theorem
Maxwell’s Reciprocity Theorem provides a measure of the linearity of a structure. A test
was conducted in accordance with the method outlined in section 2.5 on Maxwell’s
Reciprocity Theorem. For the two tests required to verify Maxwell’s Reciprocity Theorem,
the two excitation/response points were selected at nodes 13 and 87 on the aircraft. These
two points were mirrored on the measurement point grid and seemed appropriate for

87
testing. They were not perfectly symmetric since the right wing is forward of the left wing
by 1 inch.
The input excitation was placed at node 13 for the first test, and the output response
(accelerometer) was situated at node 87. Figure 92 provides the FR for this arrangement;
the coherence is in Appendix D (Fig. D47).
Frequency Response: Accel. Z-Axis Versus Load Cell Avg=1630
12.5 dB/div
-70 0 10 Hz/div 100
Figure 92. Frequency Response for Maxwell’s Reciprocity Theorem with theExcitation Input at Node 13 and the Response Output at Node 87
The second test switched the excitation and response locations, as required by Maxwell’s
Reciprocity Theorem. The shaker was set at node 87 while the accelerometer was placed
on node 13. Figure 93 displays the FR for the mirrored arrangement; the coherence is in
Appendix D (Fig. D48).
Frequency Response: Accel. Z-Axis Versus Load Cell Avg=1630
12.5 dB/div
-70 0 10 Hz/div 100
Figure 93. Frequency Response for Maxwell’s Reciprocity Theorem with theExcitation Input at Node 87 and the Response Output at Node 13
The FR data shown in Figs. 92 and 93 are similar. The similarity validates the linearity
assumption in structural dynamics (section 2.1.2) for the GVT of the Star-Lite. Figure 94
juxtaposes Figs. 92 and 93 in order to make a better comparison of the two FR
measurements.

88
Frequency Response: Accel. Z-Axis Versus Load Cell Avg=1630
12.5 dB/div
-70 0 10 Hz/div 100
Figure 94. Concatenated Frequency Responses from the Maxwell’s ReciprocityTheorem Test Validate the Linearity Assumption for the Star-Lite
The similarity between the two FR’s is apparent in Fig. 94. The minor differences in the
data between 30 Hz and 45 Hz reflect the fact that physical structures are not completely
linear; fortunately, the small degree of nonlinearity makes the linearity assumption a good
approximation for the Star-Lite.
5.3.6 Integration of Calibration Ratios
The ratio calibration results (section 5.1) provided the calibration ratios required to scale the
accelerometer/load-cell voltage ratios to the physical measurement of inertance. The
calibration ratios were integrated into the DSA FR measurements for use in properly scaling
the final GVT data. Figure 95 shows a typical FR for the accelerometer Z-axis without the
calibration ratio integrated into the DSA.
Frequency Response: Accel. Z-Axis Versus Load Cell Avg=16
0 10 Hz/div 100
-15
8 dB/div
-79
Figure 95. Typical Z-Axis Frequency Response Without Calibration Ratio
The calibration ratio for the Z-axis is 0.02983 kg, as given in Table 3. When integrated
into the DSA, the calibration ratio multiplies the FR according to Eq. 2.8.2 in the Ratio
Calibration section of Theory. The resultant FR is shown in Fig. 96.

89
Frequency Response: Accel. Z-Axis Versus Load Cell Avg=16
0 10 Hz/div 100
7
6 dB/div
-41
Figure 96. Typical Z-Axis Frequency Response With Calibration Ratio
The value of the peak at 10.5 Hz in Fig. 95 is approximately -26 dB or 0.05011. The use
of Eq. 2.8.2, the calibration ratio (0.02983 kg), and the 0.0501 amplitude value produces a
value of 1.68. In decibels, 1.68 becomes 4.5 dB, which corresponds to the amplitude of
the peak at 10.5 Hz in Fig. 96. Hence, the calibration ratios are properly integrated into the
test data shown in Fig. 96.
The calibration ratios were also integrated into the X-axis and Y-axis measurements. The
FR data associated with these axes is provided in Appendix D (Figs. D49 to D52).
5.4 Final Test Data
Frequency response data was collected at all 248 measurement points on the Star-Lite. At
each of the points, the accelerometer provided information on the motion in all three
coordinate directions. Hence, 744 FR files were collected on the Star-Lite. The FR data is
provided in universal format dataset58 on the PC formatted ZIP disk titled GVT DATA; the
disk is included in the project notebook.
The large amount of data does not allow the reproduction of all the results for this report.
Instead, a few of the FR measurements taken at different locations on the Star-Lite are
included at the end of Appendix D (Figs. D53 to D66). The locations include the left wing
(node 6), the right aileron (node 140), the main fuselage (node 226), the right elevator
(node 188), and the rudder (node 238). The Z-axis data is provided for the left wing, right
aileron, and right elevator. The Y-axis data is provided for the main fuselage and rudder,
and the X-axis data is provided for the right elevator and rudder.
No in-depth discussion of the FR data is provided because the results come primarily from
the computational analysis in I-DEAS. One important feature of all the data is the presence

90
of distinguished peaks in the FR measurements. In addition, the coherence is high at the
resonant peaks for the data but drops in areas associated with valleys in the corresponding
FR. The Z-axis response was the dominate response on the wings of the aircraft.
However, the Y-axis response became important when viewing the modal response of the
main fuselage and tail section of the Star-Lite. In addition, the X-axis data provided
additional motion of the tail section of the Star-Lite. The loss in coherence that is seen in
the Y-axis data of the main fuselage is mainly due to the use of machined wedges between
the accelerometer and fuselage for aligning the accelerometer with the aircraft coordinate
axes. Additionally, the input excitation was primarily in the Z direction. Hence, less
physical excitation was provided for the X and Y directions, and FR measurements were
more sensitive to noise contamination.
5.5 I-DEAS Modal Analysis Results
The FR data from each node point was imported and analyzed in I-DEAS according to the
procedures outlined in section 4.8. The Modal Task of the Test Application in I-DEAS
provided the modal parameters for the Star-Lite based on the 248 node-point model shown
in Fig. 37 of the Procedure section. All 248 points were linked with the Y-axis and Z-axis
FR data. The X-axis data was linked to all points except those on the wings. The X-axis
data was not considered significant on the wings due to the small longitudinal. In addition,
the camber of the wings was not accounted for while taking measurements so the X-axis
data was slightly coupled to the Z-axis data; the coupling was through a simple cosine of
the camber angle with respect to the global X-axis. In addition to the modal parameters, the
polyreference technique in I-DEAS produced the MCF (Modal Confidence Factor) and the
MAC (Modal Assurance Criterion) for determining the physical significance and linear
dependence of each mode, respectively.
The first stage of the polyreference technique estimated the natural frequencies and modal
damping based on the selection of poles (Table 5). The structural damping factor was also
included in Table 5; as stated in Eq. 2.7.3.7, the structural damping is twice the modal
damping at each natural frequency. The structural damping is included since the eventual
flutter analysis of the Star-Lite will require knowledge of the structural damping.

91
Table 5. Modal Parameters Estimated in the First Stage of the Polyreference Technique
Mode Natural Frequencies (Hz) Modal Damping (%) Structural Damping (%)
1 10.500 1.357 2.7142 16.692 1.615 3.2303 17.794 1.056 2.1124 19.493 1.310 2.6205 22.308 2.369 4.7386 27.260 3.304 6.6087 33.448 2.883 5.7668 39.448 3.005 6.0109 47.659 2.324 4.64810 49.659 2.369 4.73811 57.510 1.591 3.182
12 83.356 0.420 0.840
The natural frequencies in Table 5 are listed in chronological order from 10.5 Hz to 83.356
Hz. The modal damping factors associated with each natural frequency span a range of
0.42% to 3.304%.
The large gap in natural frequencies from 57.510 Hz to 83.356 Hz is due to the lack of
high MCF values over the frequency range. I-DEAS was able to calculate additional modes
in this region, but their MCF values indicated they were computational modes. The modes
provided in Table 5 coincide with high MCF values. Table 6 presents the MCF values for
each of the natural frequencies; the lowest MCF value in Table 6 is 0.841. In addition, the
natural frequencies are given an associated mode number.

92
Table 6. Modal Confidence Factors for Each Natural Frequency of the Star-Lite Aircraft
Mode Natural Frequencies (Hz) MCF
1 10.500 1.0002 16.692 1.0003 17.794 0.9714 19.493 0.9865 22.308 0.8656 27.260 0.8417 33.448 0.9388 39.448 0.9079 47.659 0.98610 49.659 0.98311 57.510 0.84412 83.356 0.907
Table 7 presents data from several modes that had either low MCF values or unstable
poles. The low MCF values indicate that the associated natural frequencies were
computational modes. The unstable poles generally represent positions where the curve-fit
indicates the possibility for a mode, but not enough data is available to make a final
determination. Most of the computational and unstable modes were in the upper half of the
bandwidth, primarily between Mode 11 and Mode 12 from Table 6. Some additional
modes appeared in the lower half of the bandwidth, but the natural frequencies were so
close to other modes that they were determined to represent the same mode.
Table 7. Computational Modes from the Star-Lite Modal Analysis
Natural Frequency (Hz) Type of Pole MCF7.5 Not Stable 0.35653 Not Stable 0.22367 Stable 0.31571 Stable 0.25888 Stable 0.44990 Not Stable 0.20196 Stable 0.334
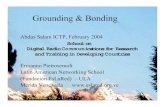
The second stage of the polyreference technique produced the mode shapes of the Star-Lite
associated with the natural frequencies shown in Table 5. In addition, the MAC matrix was
calculated in order to determine the linear dependence of the modes. Figure 97 is a three-

93
dimensional view of the MAC matrix. The MAC values of 0 to 1 are shown on the vertical
axis, whereas the matrix of the twelve physical mode shapes is on the horizontal plane.
Figure 97. Modal Assurance Criteria Matrix for the Modes of the Star-Lite Aircraft
The diagonals of the MAC matrix in Fig. 97 all have a value of one because each mode is
linearly dependent upon itself. In order to better characterize the linear dependence between
some of the modes, the MAC value of the off diagonal positions is required. The off-
diagonals in Fig. 97 indicate some linear dependence between the modes. Table 8 provides
the numerical values from the three-dimensional MAC matrix.

94
Table 8. Numerical Values from the MAC matrix for the Star-Lite Modes
Mode Number1 2 3 4 5 6 7 8 9 10 11 12
1 1.00 0.00 0.12 0.09 0.02 0.05 0.15 0.18 0.10 0.04 0.03 0.152 0.00 1.00 0.01 0.71 0.04 0.02 0.00 0.01 0.03 0.07 0.00 0.523 0.12 0.01 1.00 0.01 0.01 0.03 0.46 0.02 0.05 0.11 0.13 0.054 0.09 0.71 0.01 1.00 0.06 0.07 0.08 0.03 0.01 0.01 0.00 0.505 0.02 0.04 0.01 0.06 1.00 0.07 0.02 0.00 0.05 0.02 0.00 0.066 0.05 0.02 0.03 0.07 0.07 1.00 0.02 0.05 0.06 0.09 0.03 0.067 0.15 0.00 0.46 0.08 0.02 0.02 1.00 0.00 0.02 0.16 0.13 0.008 0.18 0.01 0.02 0.03 0.00 0.05 0.00 1.00 0.28 0.09 0.01 0.039 0.10 0.03 0.05 0.01 0.05 0.06 0.02 0.28 1.00 0.14 0.03 0.0210 0.04 0.07 0.11 0.01 0.02 0.09 0.16 0.09 0.14 1.00 0.00 0.0211 0.03 0.00 0.13 0.00 0.00 0.03 0.13 0.01 0.03 0.00 1.00 0.0012 0.15 0.52 0.05 0.50 0.06 0.06 0.00 0.03 0.02 0.02 0.00 1.00
Mod
e N
um
ber
The light blue bars and the green bars in Table 8 indicate MAC values below 0.52 and may
be due to noise contamination or lack of resolution in some of the data taken in the GVT.
However, the yellow bars are of a significantly higher value (0.71) and indicate some
coupling between the second and fourth modes. The coupling is apparent in the modal
animation of the Star-Lite which came from the Post Processing Task of I-DEAS.
The deformed mode shapes of the Star-Lite are presented in Appendix E. Each mode shape
is shown in three profile views plus one 3/4 view. Each mode is exaggerated by a factor of
10. The first mode shape (Fig. E1) represents simple symmetrical bending of the wings
and is commonly named the first symmetric bending mode. The second mode shape (Fig.
E2) contains asymmetric wing bending with tail cone rotation. The third mode shape (Fig.
E3) is similar to the second mode with asymmetric wing bending, but the fin and rudder
and in an out-of-phase bending mode. The fourth mode (Fig. E4) is identical to the third
but has an additional element of rudder bending. The fifth mode (Fig. E5) contains the first
symmetric stabilizer bending. The sixth mode (Fig. E6) contains asymmetric bending for
both the wing and vertical stabilizer, and some minimal torsion is present in the wing and
rudder. Mode seven (Fig. E7) contains wing and stabilizer bending with some rudder
bending. Mode eight (Fig. E8) displays very pronounced torsion in both the wing and
stabilizer and appears to be the first completely torsional mode. The ninth mode (Fig. E9)
couples the characteristics of mode eight with a second symmetric wing-bending mode and
vertical fuselage bending. The tenth mode (Fig. E10) is similar to mode 9 except the
fuselage bending is in the lateral direction. The eleventh mode (Fig. E11) displays very

95
distinguished fuselage bending. Finally, the twelfth mode (Fig. E12) displays a higher-
order bending for both the wings and stabilizers, and the fuselage is bending in a very
complex mode. The odd shape of the fuselage in Fig. E12 is due to the high magnification
of the mode displacements.
The theory for residuals, as mentioned in section 2.7.4, provides a method to account for
the modes outside of the frequency band of interest. I-DEAS contains a method for adding
the residuals to the analytic curve fit of the FR data, but the use of the residual correction
produced awkward results that seemed incorrect. When the residuals were added to the
analytic function, the resultant function would perfectly match the original test function.
The use of residuals, as outlined in [16], indicated that the residuals would simply improve
the amplitude of the analytic function so that the resonant-peak amplitudes would more
closely match those from the original test function. The use of residuals shown in the FR
data in [16] did not shift the analytic FR to exactly match the test FR, as was the case with
the I-DEAS results. Hence, the residuals were not included in the analysis results.
Fortunately, the residuals do not affect the calculation of the modal parameters. Residuals
do affect the relative amplitudes of the mode shapes, but the main objective of the GVT was
to provide the natural frequencies and structural damping factor for the future flutter
analysis. If the precise amplitudes are needed for future work, the GVT FR data is
available on the ZIP disk enclosed with the project notebook. Additionally, the I-DEAS
model and the FR data is currently available on the Oberon server within the student
directory titled /daniels/IDEAS.
5.6 Comparison of Spring 1997 GVT Data with Spring 1989 Data
The success of the I-DEAS modal analysis provided the modal parameters of the Star-Lite
donated to the University of Texas by Mark Rogers. Knowledge of these modal
parameters allows for a comparison of the data with the GVT performed in 1989 on a
different Star-Lite aircraft with a tail-dragger landing gear [2]. Table 9 presents the modal
parameter data found in the 1989 GVT.

96
Table 9. Modal Parameter Data from the 1989 GVT of a Tail-Gear Star-Lite Aircraft
Mode Natural Frequency (Hz) Damping Ratio MCF1 7.615 0.39139 0.4182 15.042 0.07188 0.7493 17.753 0.08272 0.6664 21.025 0.07472 0.9715 28.099 0.02915 0.9896 30.578 0.07519 0.4537 34.467 0.03972 0.9948 36.281 0.05467 0.8879 39.058 0.06599 0.78210 43.784 0.04186 0.85011 46.024 0.04091 0.89212 48.849 0.02763 0.88213 48.936 0.01886 0.951
The previous data did not indicate if the damping ratio in Table 9 was for modal damping or
structural damping. However, the primary concern in the data comparison was simply to
look at which natural frequencies were similar. A comparison of Table 9 with Tables 6 and
7 shows some similarities and differences between the estimated frequencies. The first
mode calculated in the current GVT is 10.5 Hz, which is 3 Hz above the previous GVT’s
first mode of 7.615 Hz. The previous GVT’s first mode has a low MCF of 0.418 which
indicates that their first mode was a computational mode. In fact, Table 7 shows that the
current GVT data analysis produced a computational mode at 7.5 Hz with an MCF of
0.356.
The 1989 GVT’s natural frequencies for modes 2,3, 4, and 5 in Table 9 are very similar to
the 1997 GVT frequencies for modes 2, 3, 5, and 6 in Table 6. However, the current GVT
data has a consistently higher MCF that indicates better data was obtained for the current
GVT. In addition, the current GVT found an additional mode at 19.493 Hz with a high
MCF. The remainder of the modes found in Table 6 for the current GVT had values
similar to several of the modes calculated by the 1989 GVT. However, the 1989 GVT
found more modes over the range of 30 Hz to 50 Hz than were found from the current
study. Most of the previous GVT data above 30 Hz had high MCF values; the only natural
frequency with a low MCF (0.453) was the natural frequency of 30.578 Hz.

97
The differences in the number of modes over 30 Hz to 50 Hz could be due to the different
positions of the third landing gear for the two aircraft; the current Star-Lite has a nose
landing gear while the previous Star-Lite was a tail dragger. The modal parameter
differences could even be dependent on the methods used by the different builders of the
two Star-Lite aircraft. The other possible source for the discrepancies could have been due
to the older analysis equipment used by the 1989 GVT group. Otherwise, the previous
data may have had better resolution over the 30 Hz to 50 Hz range.