
Graphs - Carleton University
36
Albert Chan http://www.scs.carleton.ca/~achan School of Computer Science, Carleton University COMP 2002/2402 Introduction to Data Structures and Data Types Version 03.s 11-1 Graphs • Introductions • DFS • BFS • Biconnectivity • DiGraphs • MST • Shortest Paths Albert Chan http://www.scs.carleton.ca/~achan School of Computer Science, Carleton University COMP 2002/2402 Introduction to Data Structures and Data Types Version 03.s 11-2 Graph • A graph is a pair (V, E), where – V is a set of nodes, called vertices – E is a collection of pairs of vertices, called edges – Vertices and edges are positions and store elements • Example: – A vertex represents an airport and stores the three-letter airport code – An edge represents a flight route between two airports and stores the mileage of the route ORD PVD MIA DFW SFO LAX LGA HNL 849 802 1387 1743 1843 1099 1120 1233 337 2555 142
Transcript of Graphs - Carleton University

Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-1
Graphs
• Introductions• DFS• BFS• Biconnectivity• DiGraphs• MST• Shortest Paths
Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-2
Graph• A graph is a pair (V, E), where
– V is a set of nodes, called vertices– E is a collection of pairs of vertices, called edges– Vertices and edges are positions and store elements
• Example:– A vertex represents an airport and stores the three-letter airport code– An edge represents a flight route between two airports and stores the mileage of the
routeORD PVD
MIADFW
SFO
LAX
LGA
HNL
849
802
13871743
1843
10991120
1233
337
2555
142

Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-3
ORD PVDflight
AA 1206
ORD PVD849miles
Edge Types• Directed edge
– ordered pair of vertices (u,v)– first vertex u is the origin– second vertex v is the destination– e.g., a flight
• Undirected edge– unordered pair of vertices (u,v)– e.g., a flight route
• Directed graph– all the edges are directed– e.g., route network
• Undirected graph– all the edges are undirected– e.g., flight network
Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-4
Jo h n
D a vidP a ul
brow n .edu
cox.net
cs.bro w n .ed u
att.netqw est.net
m a th.b row n.e du
csla b 1bcsla b 1a
Applications
• Electronic circuits– Printed circuit board– Integrated circuit
• Transportation networks– Highway network– Flight network
• Computer networks– Local area network– Internet– Web
• Databases– Entity-relationship diagram

Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-5
XU
V
W
Z
Y
a
c
b
e
d
f
g
h
i
j
Terminology
• End vertices (or endpoints) of an edge– U and V are the endpoints of a
• Edges incident on a vertex– a, d, and b are incident on V
• Adjacent vertices– U and V are adjacent
• Degree of a vertex– X has degree 5
• Parallel edges– h and i are parallel edges
• Self-loop– j is a self-loop
Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-6
P1
XU
V
W
Z
Y
a
c
b
e
d
f
g
hP2
Terminology
• Path– sequence of alternating vertices and edges– begins with a vertex– ends with a vertex– each edge is preceded and followed by its
endpoints• Simple path
– path such that all its vertices and edgesare distinct
• Examples– P1=(V,b,X,h,Z) is a simple path– P2=(U,c,W,e,X,g,Y,f,W,d,V) is a path
that is not simple

Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-7
C1
XU
V
W
Z
Y
a
c
b
e
d
f
g
hC2
Terminology
• Cycle– circular sequence of alternating
vertices and edges– each edge is preceded and followed
by its endpoints• Simple cycle
– cycle such that all its vertices andedges are distinct
• Examples– C1=(V,b,X,g,Y,f,W,c,U,a,↵) is a
simple cycle– C2=(U,c,W,e,X,g,Y,f,W,d,V,a,↵) is
a cycle that is not simple
Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-8
Example– n = = = = 4– m = = = = 6– deg(v) = 3
Properties
• Notation– n number of vertices– m number of edges– deg(v) degree of vertex v
• Property 1– Sv deg(v) = 2m– Proof: each endpoint is
counted twice• Property 2
– In an undirected graph with noself-loops and no multipleedges
– m ≤ n (n - 1)/2– Proof: each vertex has degree
at most (n - 1)

Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-9
Main Methods of the Graph ADT
• Vertices and edges– are positions– store elements
• Accessor methods– aVertex()– incidentEdges(v)– endVertices(e)– isDirected(e)– origin(e)– destination(e)– opposite(v, e)– areAdjacent(v, w)
• Update methods– insertVertex(o)– insertEdge(v, w, o)– insertDirectedEdge(v, w, o)– removeVertex(v)– removeEdge(e)
• Generic methods– numVertices()– numEdges()– vertices()– edges()
Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-10
v
u
w
a c
b
a
zd
u v w z
b c d
Edge List Structure• Vertex object
– element– reference to position in
vertex sequence• Edge object
– element– origin vertex object– destination vertex object– reference to position in
edge sequence• Vertex sequence
– sequence of vertex objects• Edge sequence
– sequence of edge objects

Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-11
u
v
wa b
a
u v w
b
Adjacency List Structure
• Edge list structure• Incidence sequence for
each vertex– sequence of references
to edge objects ofincident edges
• Augmented edge objects– references to associated
positions in incidencesequences of endvertices
Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-12
u
v
wa b
2
1
0
210
∅∅∅∅∅∅∅∅
∅∅∅∅
∅∅∅∅∅∅∅∅
a
u v w0 1 2
b
Adjacency Matrix Structure
• Edge list structure• Augmented vertex
objects– Integer key (index)
associated with vertex
• 2D-array adjacencyarray– Reference to edge object
for adjacent vertices– Null for non nonadjacent
vertices

Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-13
Performance
n2n + mn + mSpace
n2deg(v)mremoveVertex(v)
111insertEdge(v, w, o)
n211insertVertex(o)
111removeEdge(e)
1min(deg(v), deg(w))mareAdjacent (v, w)
ndeg(v)mincidentEdges(v)
AdjacencyMatrix
AdjacencyList
EdgeList
• n vertices• m edges• no parallel edges• no self-loops
Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-14
Subgraph
Spanning subgraph
Subgraphs
• A subgraph S of a graph Gis a graph such that– The edges of S are a subset
of the edges of G– The edges of S are a subset
of the edges of G
• A spanning subgraph of Gis a subgraph that containsall the vertices of G

Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-15
Connectivity
• A graph is connected ifthere is a path betweenevery pair of vertices
• A connected component ofa graph G is a maximalconnected subgraph of G
Connected graph
Non connected graph withtwo connected components
Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-16
Tree
Forest
Trees and Forests
• A (free) tree is an undirectedgraph T such that– T is connected– T has no cycles– This definition of tree is
different from the one of arooted tree
• A forest is an undirectedgraph without cycles
• The connected components ofa forest are trees

Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-17
Graph
Spanning tree
Spanning Trees and Forests
• A spanning tree of a connectedgraph is a spanning subgraphthat is a tree
• A spanning tree is not uniqueunless the graph is a tree
• Spanning trees have applicationsto the design of communicationnetworks
• A spanning forest of a graph is aspanning subgraph that is aforest
Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-18
Depth-First Search
• Depth-first search (DFS) is ageneral technique for traversinga graph
• A DFS traversal of a graph G– Visits all the vertices and
edges of G– Determines whether G is
connected– Computes the connected
components of G– Computes a spanning forest of
G
• DFS on a graph with n verticesand m edges takes O(n + m )time
• DFS can be further extended tosolve other graph problems
– Find and report a path betweentwo given vertices
– Find a cycle in the graph• Depth-first search is to graphs
what Euler tour is to binarytrees

Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-19
Algorithm DFS(G, v)Input graph G and a start vertex v of GOutput labeling of the edges of G
in the connected component of vas discovery edges and back edges
setLabel(v, VISITED)for all e ∈ G.incidentEdges(v)
if getLabel(e) = UNEXPLOREDw ← opposite(v,e)if getLabel(w) = UNEXPLORED
setLabel(e, DISCOVERY)DFS(G, w)
elsesetLabel(e, BACK)
Algorithm DFS(G)Input graph GOutput labeling of the edges of G
as discovery edges andback edges
for all u ∈ G.vertices()setLabel(u, UNEXPLORED)
for all e ∈ G.edges()setLabel(e, UNEXPLORED)
for all v ∈ G.vertices()if getLabel(v) = UNEXPLORED
DFS(G, v)
DFS Algorithm• The algorithm uses a mechanism for setting
and getting “labels” of vertices and edges
Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-20
Example
DB
A
C
E
DB
A
C
E
DB
A
C
E
discovery edgeback edge
A visited vertexA unexplored vertex
unexplored edge

Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-21
Example (cont.)
DB
A
C
E
DB
A
C
E
DB
A
C
E
DB
A
C
E
Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-22
DFS and Maze Traversal• The DFS algorithm is similar to a
classic strategy for exploring a maze– We mark each intersection, corner
and dead end (vertex) visited– We mark each corridor (edge )
traversed– We keep track of the path back to
the entrance (start vertex) by meansof a rope (recursion stack)

Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-23
DB
A
C
E
Properties of DFS
• Property 1• DFS(G, v) visits all the
vertices and edges in theconnected component of v
• Property 2• The discovery edges
labeled by DFS(G, v) form aspanning tree of the connectedcomponent of v
Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-24
Analysis of DFS• Setting/getting a vertex/edge label takes O(1) time• Each vertex is labeled twice
– once as UNEXPLORED– once as VISITED
• Each edge is labeled twice– once as UNEXPLORED– once as DISCOVERY or BACK
• Method incidentEdges is called once for each vertex• DFS runs in O(n + m) time provided the graph is represented by the
adjacency list structure– Recall that ΣΣΣΣv deg(v) = 2m
Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-25
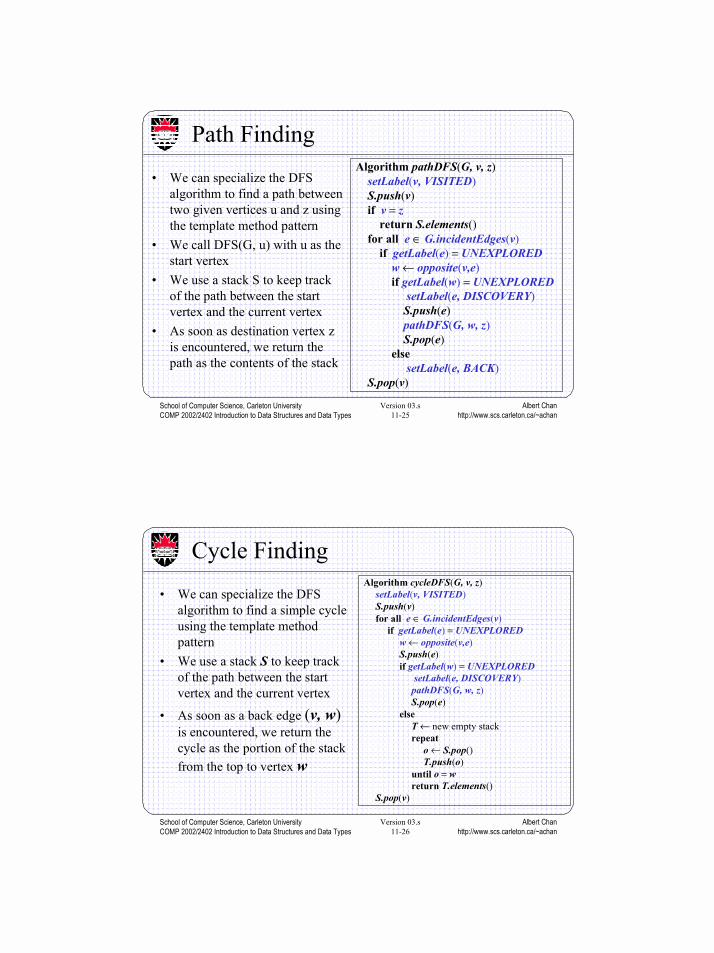
Algorithm pathDFS(G, v, z)setLabel(v, VISITED)S.push(v)if v = z
return S.elements()for all e ∈ G.incidentEdges(v)
if getLabel(e) = UNEXPLOREDw ← opposite(v,e)if getLabel(w) = UNEXPLORED
setLabel(e, DISCOVERY)S.push(e)pathDFS(G, w, z)S.pop(e)
else setLabel(e, BACK)
S.pop(v)
Path Finding
• We can specialize the DFSalgorithm to find a path betweentwo given vertices u and z usingthe template method pattern
• We call DFS(G, u) with u as thestart vertex
• We use a stack S to keep trackof the path between the startvertex and the current vertex
• As soon as destination vertex zis encountered, we return thepath as the contents of the stack
Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-26
Cycle Finding
• We can specialize the DFSalgorithm to find a simple cycleusing the template methodpattern
• We use a stack S to keep trackof the path between the startvertex and the current vertex
• As soon as a back edge (v, w)is encountered, we return thecycle as the portion of the stackfrom the top to vertex w
Algorithm cycleDFS(G, v, z)setLabel(v, VISITED)S.push(v)for all e ∈ G.incidentEdges(v)
if getLabel(e) = UNEXPLOREDw ← opposite(v,e)S.push(e)if getLabel(w) = UNEXPLORED
setLabel(e, DISCOVERY)pathDFS(G, w, z)S.pop(e)
elseT ← new empty stackrepeat
o ← S.pop()T.push(o)
until o = wreturn T.elements()
S.pop(v)

Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-27
Breadth-First Search
• Breadth-first search (BFS) is ageneral technique for traversinga graph
• A BFS traversal of a graph G– Visits all the vertices and
edges of G– Determines whether G is
connected– Computes the connected
components of G– Computes a spanning forest of
G
• BFS on a graph with n verticesand m edges takes O(n + m )time
• BFS can be further extended tosolve other graph problems
– Find and report a path with theminimum number of edgesbetween two given vertices
– Find a simple cycle, if there isone
Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-28
BFS Algorithm
• The algorithm uses amechanism for setting andgetting “labels” of vertices andedges
Algorithm BFS(G, s)L0 ← new empty sequenceL0.insertLast(s)setLabel(s, VISITED)i ← 0while ¬Li.isEmpty()
Li +1 ← new empty sequencefor all v ∈ Li.elements()
for all e ∈ G.incidentEdges(v)if getLabel(e) = UNEXPLORED
w ← opposite(v,e)if getLabel(w) = UNEXPLORED
setLabel(e, DISCOVERY)setLabel(w, VISITED)Li +1.insertLast(w)
elsesetLabel(e, CROSS)
i ← i +1
Algorithm BFS(G)Input graph GOutput labeling of the edges
and partition of thevertices of G
for all u ∈ G.vertices()setLabel(u, UNEXPLORED)
for all e ∈ G.edges()setLabel(e, UNEXPLORED)
for all v ∈ G.vertices()if getLabel(v) = UNEXPLORED
BFS(G, v)

Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-29
Example
CB
A
E
D
discovery edgecross edge
A visited vertexA unexplored vertex
unexplored edge
L0
L1
F
CB
A
E
D
L0
L1
F
CB
A
E
D
L0
L1
F
Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-30
Example (cont.)
CB
A
E
D
L0
L1
F
CB
A
E
D
L0
L1
FL2
CB
A
E
D
L0
L1
FL2
CB
A
E
D
L0
L1
FL2

Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-31
Example (cont.)
CB
A
E
D
L0
L1
FL2
CB
A
E
D
L0
L1
FL2
CB
A
E
D
L0
L1
FL2
Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-32
PropertiesNotation
Gs: connected component of sProperty 1
BFS(G, s) visits all the vertices andedges of Gs
Property 2The discovery edges labeled byBFS(G, s) form a spanning tree Tsof Gs
Property 3For each vertex v in Li
– The path of Ts from s to v has iedges
– Every path from s to v in Gs has atleast i edges
CB
A
E
D
L0
L1
FL2
CB
A
E
D
F

Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-33
Analysis• Setting/getting a vertex/edge label takes O(1) time• Each vertex is labeled twice
– once as UNEXPLORED– once as VISITED
• Each edge is labeled twice– once as UNEXPLORED– once as DISCOVERY or CROSS
• Each vertex is inserted once into a sequence Li• Method incidentEdges is called once for each vertex• BFS runs in O(n + m) time provided the graph is represented by the
adjacency list structure– Recall that ΣΣΣΣv deg(v) = 2m
Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-34
Applications
• Using the template method pattern, we can specialize theBFS traversal of a graph G to solve the following problemsin O(n + m) time– Compute the connected components of G– Compute a spanning forest of G– Find a simple cycle in G, or report that G is a forest– Given two vertices of G, find a path in G between them with the
minimum number of edges, or report that no such path exists

Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-35
DFS vs. BFS
CB
A
E
D
L0
L1
FL2
CB
A
E
D
F
DFS BFS
√√√√Biconnected components
√√√√Shortest paths
√√√√√√√√Spanning forest, connected components,paths, cycles
BFSDFSApplications
Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-36
CB
A
E
D
L0
L1
FL2
CB
A
E
D
F
DFS BFS
DFS vs. BFS (cont.)
• Back edge (v,w)– w is an ancestor of v in the tree
of discovery edges
• Cross edge (v,w)– w is in the same level as v or in
the next level in the tree ofdiscovery edges
Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-37
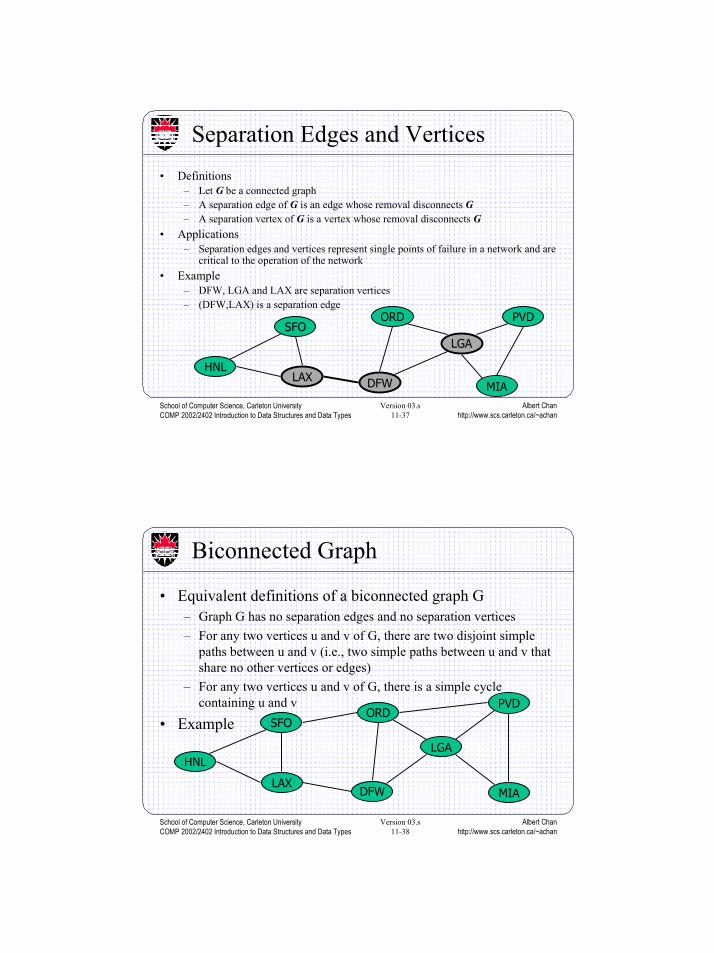
Separation Edges and Vertices• Definitions
– Let G be a connected graph– A separation edge of G is an edge whose removal disconnects G– A separation vertex of G is a vertex whose removal disconnects G
• Applications– Separation edges and vertices represent single points of failure in a network and are
critical to the operation of the network• Example
– DFW, LGA and LAX are separation vertices– (DFW,LAX) is a separation edge
ORD PVD
MIADFW
SFO
LAX
LGA
HNL
Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-38
ORDPVD
MIADFW
SFO
LAX
LGAHNL
Biconnected Graph
• Equivalent definitions of a biconnected graph G– Graph G has no separation edges and no separation vertices– For any two vertices u and v of G, there are two disjoint simple
paths between u and v (i.e., two simple paths between u and v thatshare no other vertices or edges)
– For any two vertices u and v of G, there is a simple cyclecontaining u and v
• Example

Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-39
ORD PVD
MIADFW
SFO
LAX
LGA
HNLRDU
Biconnected Components• Biconnected component of a graph G
– A maximal biconnected subgraph of G, or– A subgraph consisting of a separation edge of G and its end vertices
• Interaction of biconnected components– An edge belongs to exactly one biconnected component– A nonseparation vertex belongs to exactly one biconnected component– A separation vertex belongs to two or more biconnected components
• Example of a graph with four biconnected components
Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-40
Equivalence Classes• Given a set S, a relation R on S is a set of ordered pairs of elements of S, i.e., R is a
subset of S×S• An equivalence relation R on S satisfies the following properties
– Reflexive: (x,x) ∈ R– Symmetric: (x,y) ∈ R ⇒ (y,x) ∈ R– Transitive: (x,y) ∈ R ∧ (y,z) ∈ R ⇒ (x,z) ∈ R
• An equivalence relation R on S induces a partition of the elements of S into equivalenceclasses
• Example (connectivity relation among the vertices of a graph):– Let V be the set of vertices of a graph G– Define the relation
C = {(v,w) ∈ V×V such that G has a path from v to w}– Relation C is an equivalence relation– The equivalence classes of relation C are the vertices in each connected component of graph G

Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-41
ab
g
cj
de
f
i
Equivalence classes of linked edges:{a} {b, c, d, e, f} {g, i, j}
ab
g
cj
de
f
i
Link Relation• Edges e and f of connected graph
G are linked if– e = f, or– G has a simple cycle containing
e and f• Theorem:The link relation on the
edges of a graph is anequivalence relation
– Proof Sketch:– The reflexive and symmetric
properties follow from thedefinition
– For the transitive property,consider two simple cyclessharing an edge
Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-42
Link Components• The link components of a connected graph G are the equivalence classes of
edges with respect to the link relation• A biconnected component of G is the subgraph of G induced by an
equivalence class of linked edges• A separation edge is a single-element equivalence class of linked edges• A separation vertex has incident edges in at least two distinct equivalence
classes of linked edge
ORD PVD
MIADFW
SFO
LAX
LGA
HNLRDU

Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-43
a
bg
cj
d
e
f
i
Auxiliary graph B
DFS on graph G
a
db
c
eh i
jf
h
g
i
Auxiliary Graph• Auxiliary graph B for a connected
graph G– Associated with a DFS traversal of
G– The vertices of B are the edges of G– For each back edge e of G, B has
edges (e,f1), (e,f2) , …, (e,fk),where f1, f2, …, fk are thediscovery edges of G that form asimple cycle with e
– Its connected componentscorrespond to the the linkcomponents of G
Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-44
Auxiliary graph BDFS on graph G
Auxiliary Graph (cont.)
• In the worst case, the number of edges of the auxiliarygraph is proportional to nm

Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-45
Proxy GraphAlgorithm proxyGraph(G)
Input connected graph GOutput proxy graph F for GF ←←←← empty graphDFS(G, s) { s is any vertex of G}for all discovery edges e of G
F.insertVertex(e)setLabel(e, UNLINKED)
for all vertices v of G in DFS visit orderfor all back edges e = (u,v)
F.insertVertex(e)repeat
f ←←←← discovery edge with dest. uF.insertEdge(e,f,∅∅∅∅)if f getLabel(f) = UNLINKED
setLabel(f, LINKED)u ←←←← origin of edge f
elseu ←←←← v { ends the loop }
until u = vreturn F
a
bg
cj
d
e
f
i
Proxy graph F
DFS on graph G
a
db
c
eh i
jf
h
g
i
Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-46
a
bg
cj
d
e
f
i
Proxy graph F
DFS on graph G
a
db
c
eh i
jf
h
g
i
Proxy Graph (cont.)• Proxy graph F for a connected graph G
– Spanning forest of the auxiliary graph B– Has m vertices and O(m) edges– Can be constructed in O(n + m) time– Its connected components (trees)
correspond to the the link componentsof G
• Given a graph G with n vertices and medges, we can compute the following inO(n + m) time
– The biconnected components of G
– The separation vertices of G– The separation edges of G

Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-47
A
C
E
B
D
Digraphs
• A digraph is a directed graph whose edges are all directed• Applications
– one-way streets– flights– task scheduling
Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-48
A
C
E
B
D
Directed DFS
• We can specialize the traversalalgorithms (DFS and BFS) todigraphs by traversing edgesonly along their direction
• In the directed DFS algorithm,we have four types of edges
– discovery edges– back edges– forward edges– cross edges
• A directed DFS starting a avertex s determines the verticesreachable from s

Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-49
B
A
D
C
E
B
A
D
C
E
G
G*
Transitive Closure
• Given a digraph G, the transitiveclosure of G is the digraph G* suchthat
– G* has the same vertices as G– if G has a directed path from u to v (u
≠ v), G* has a directed edge from u tov
• The transitive closure providesreachability information about adigraph
• We can compute the transitive closurein time O(n(n + m)) by repeatedapplications of directed DFS
Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-50
Algorithm FloydWarshall(G)Input digraph GOutput transitive closure G* of Gi ← 1for all v ∈ G.vertices()
denote v as vii ← i + 1
G0 ← Gfor k ← 1 to n do
Gk ← Gk −−−− 1 for i ← 1 to n (i ≠≠≠≠ k) do
for j ← 1 to n (j ≠≠≠≠ i, k) doif Gk −−−− 1.areAdjacent(vi, vk) ∧∧∧∧
Gk −−−− 1.areAdjacent(vk, vj) if ¬¬¬¬Gk.areAdjacent(vi, vj)
Gk.insertDirectedEdge(vi, vj , k)return Gn
Floyd-Warshall’s Algorithm• Floyd-Warshall’s algorithm
numbers the vertices of adigraph G as v1 , …, vn andcomputes a series of digraphsG0, …, Gn
– G0=G– Gk has a directed edge (vi, vj)
if G has a directed path from vito vj with intermediate verticesin the set {v1 , …, vk}
• We have that Gn = G*• In phase k, digraph Gk is
computed from Gk - 1

Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-51
Examplev4
v5
B
A
D
C
E
B
A
D
C
E
B
A
D
C
EG = G0 = G1 = G2
G3 G4 = G5 = G*
v1
v2
v3
v4v5
v1
v2
v3
v1
v2
v3
v4v5
Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-52
B
A
D
C
E
DAG G
B
A
D
C
E
Topological
orderingof G
v1
v2
v3
v4 v5
DAGs and Topological Ordering
• A directed acyclic graph (DAG) is adigraph that has no directed cycles
• A topological ordering of a digraph is anumbering v1 , …, vn of the vertices suchthat for every edge (vi , vj), we have i < j
• Example: in a task scheduling digraph, atopological ordering a task sequence thatsatisfies the precedence constraints
• Theorem: A digraph admits a topologicalordering if and only if it is a DAG

Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-53
Minimum Spanning TreeSpanning subgraph
– Subgraph of a graph Gcontaining all the vertices ofG
Spanning tree– Spanning subgraph that is
itself a (free) treeMinimum spanning tree (MST)
– Spanning tree of a weightedgraph with minimum totaledge weight
• Applications– Communications networks– Transportation networks
ORD
PIT
ATL
STL
DEN
DFW
DCA
101
9
8
6
3
25
7
4
Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-54
84
2 36
7
7
9
8e
Cf
84
2 36
7
7
9
8
C
e
f
Replacing f with e yieldsa better spanning tree
Cycle Property
• Cycle Property:– Let T be a minimum spanning
tree of a weighted graph G– Let e be an edge of G that is not
in T and C let be the cycleformed by e with T
– For every edge f of C, weight(f)≤ weight(e)
– Proof:– By contradiction– If weight(f) > weight(e) we can
get a spanning tree of smallerweight by replacing e with f

Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-55
U V
74
2 85
7
3
9
8 e
f
74
2 85
7
3
9
8 e
f
Replacing f with e yieldsanother MST
U V
Partition Property• Partition Property:
– Consider a partition of the vertices of Ginto subsets U and V
– Let e be an edge of minimum weightacross the partition
– There is a minimum spanning tree of Gcontaining edge e
– Proof:– Let T be an MST of G– If T does not contain e, consider the
cycle C formed by e with T and let f bean edge of C across the partition
– By the cycle property,weight(f) ≤ weight(e)
– Thus, weight(f) = weight(e)– We obtain another MST by replacing f
with e
Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-56
Prim-Jarnik’s Algorithm
• Prim-Jarnik’s algorithm for computing an MST is similar to Dijkstra’salgorithm
• We assume that the graph is connected• We pick an arbitrary vertex s and we grow the MST as a cloud of
vertices, starting from s• We store with each vertex v a label d(v) representing the smallest
weight of an edge connecting v to a vertex in the cloud• At each step
– We add to the cloud the vertex u outside the cloud with the smallestdistance label
– We update the labels of the vertices adjacent to u

Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-57
Algorithm PrimJarnikMST(G)Q ← new heap-based priority queues ← a vertex of Gfor all v ∈ G.vertices()
if v = ssetDistance(v, 0)
elsesetDistance(v, ∞∞∞∞)
setParent(v, ∅∅∅∅)l ← Q.insert(getDistance(v), v)setLocator(v,l)
while ¬Q.isEmpty()u ← Q.removeMin()for all e ∈ G.incidentEdges(u)
z ← G.opposite(u,e)r ← weight(e)if r < getDistance(z)
setDistance(z,r)setParent(z,e)
Q.replaceKey(getLocator(z),r)
Prim-Jarnik’s Algorithm (cont.)
• A priority queue stores thevertices outside the cloud
– Key: distance– Element: vertex
• Locator-based methods– insert(k,e) returns a locator– replaceKey(l,k) changes the
key of an item• We store three labels with
each vertex:– Distance– Parent edge in MST– Locator in priority queue
Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-58
Example
BD
C
A
F
E
74
28
5
7
3
9
8
0 7
2
8 ∞∞∞∞
∞∞∞∞
BD
C
A
F
E
74
28
5
7
3
9
8
0 7
2
5 ∞∞∞∞
7
BD
C
A
F
E
74
28
5
7
3
9
8
0 7
2
5 ∞∞∞∞
7
BD
C
A
F
E
74
28
5
7
3
9
8
0 7
2
5 4
7

Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-59
Example (contd.)
BD
C
A
F
E
74
28
5
7
3
9
8
0 3
2
5 4
7
BD
C
A
F
E
74
28
5
7
3
9
8
0 3
2
5 4
7
Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-60
Analysis• Graph operations
– Method incidentEdges is called once for each vertex• Label operations
– We set/get the distance, parent and locator labels of vertex z O(deg(z)) times– Setting/getting a label takes O(1) time
• Priority queue operations– Each vertex is inserted once into and removed once from the priority queue, where
each insertion or removal takes O(log n) time– The key of a vertex w in the priority queue is modified at most deg(w) times, where
each key change takes O(log n) time• Prim-Jarnik’s algorithm runs in O((n + m) log n) time provided the graph is
represented by the adjacency list structure– Recall that Sv deg(v) = 2m
• The running time is O(m log n) since the graph is connected

Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-61
Dijkstra vs. Prim-Jarnik
Algorithm PrimJarnikMST(G)Q ← new heap-based priority queues ← a vertex of Gfor all v ∈ G.vertices()
if v = ssetDistance(v, 0)
elsesetDistance(v, ∞∞∞∞)
setParent(v, ∅∅∅∅)l ← Q.insert(getDistance(v), v)setLocator(v,l)
while ¬Q.isEmpty()u ← Q.removeMin()for all e ∈ G.incidentEdges(u)
z ← G.opposite(u,e)r ← weight(e)if r < getDistance(z)
setDistance(z,r)setParent(z,e)
Q.replaceKey(getLocator(z),r)
Algorithm DijkstraShortestPaths(G, s)Q ← new heap-based priority queue
for all v ∈ G.vertices()if v = s
setDistance(v, 0)else
setDistance(v, ∞∞∞∞) setParent(v, ∅∅∅∅)
l ← Q.insert(getDistance(v), v)setLocator(v,l)
while ¬Q.isEmpty()u ← Q.removeMin()for all e ∈ G.incidentEdges(u)
z ← G.opposite(u,e)r ← getDistance(u) + weight(e)if r < getDistance(z)
setDistance(z,r)setParent(z,e)
Q.replaceKey(getLocator(z),r)
Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-62
Algorithm KruskalMST(G)for each vertex V in G do
define a Cloud(v) of ! {v}let Q be a priority queue.Insert all edges into Q using their weights as the
keyT ! ∅∅∅∅while T has fewer than n-1 edges do
edge e = T.removeMin()Let u, v be the endpoints of eif Cloud(v) ≠≠≠≠ Cloud(u) then
Add edge e to TMerge Cloud(v) and Cloud(u)
return T
Kruskal’s Algorithm
• A priority queue storesthe edges outside thecloud
– Key: weight– Element: edge
• At the end of thealgorithm
– We are left with onecloud thatencompasses theMST
– A tree T which is ourMST

Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-63
ORD PVD
MIADFW
SFO
LAX
LGA
HNL
849
802
13871743
1843
10991120
1233
337
2555
142
1205
Weighted Graph
• In a weighted graph, each edge has an associated numerical value,called the weight of the edge
• Edge weights may represent, distances, costs, etc.• Example:
– In a flight route graph, the weight of an edge represents the distance inmiles between the endpoint airports
Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-64
ORD PVD
MIADFW
SFO
LAX
LGA
HNL
849
802
13871743
1843
10991120
1233
337
2555
142
1205
Shortest Path Problem• Given a weighted graph and two vertices u and v, we want to find a path of minimum total weight
between u and v• Applications
– Flight reservations– Driving directions– Internet packet routing
• Example:– Shortest path between Providence and Honolulu

Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-65
ORD PVD
MIADFW
SFO
LAX
LGA
HNL
849
802
13871743
1843
10991120
1233
337
2555
142
1205
Shortest Path Properties
• Property 1: A subpath of a shortest path is itself a shortest path• Property 2: There is a tree of shortest paths from a start vertex to all the
other vertices• Example: Tree of shortest paths from Providence
Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-66
Dijkstra’s Algorithm
• The distance of a vertex v froma vertex s is the length of ashortest path between s and v
• Dijkstra’s algorithm computesthe distances of all the verticesfrom a given start vertex s
• Assumptions:– the graph is connected– the edges are undirected– the edge weights are
nonnegative
• We grow a “cloud” of vertices,beginning with s and eventuallycovering all the vertices
• We store with each vertex v alabel d(v) representing thedistance of v from s in thesubgraph consisting of thecloud and its adjacent vertices
• At each step– We add to the cloud the vertex
u outside the cloud with thesmallest distance label
– We update the labels of thevertices adjacent to u

Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-67
d(z) = 75
d(u) = 5010
zsu
d(z) = 60
d(u) = 5010
zsu
Edge Relaxation
• Consider an edge e = (u,z)such that
– u is the vertex mostrecently added to thecloud
– z is not in the cloud• The relaxation of edge e
updates distance d(z) asfollows
• d(z) ← min(d(z),d(u)+ weight(e)
Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-68
Example
CB
A
E
D
F
0
428
∞∞∞∞ ∞∞∞∞
48
7 1
2 5
2
3 9
CB
A
E
D
F
0
328
5 11
48
7 1
2 5
2
3 9
CB
A
E
D
F
0
328
5 8
48
7 1
2 5
2
3 9
CB
A
E
D
F
0
327
5 8
48
7 1
2 5
2
3 9

Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-69
Example (cont.)
CB
A
E
D
F
0
327
5 8
48
7 1
2 5
2
3 9
CB
A
E
D
F
0
327
5 8
48
7 1
2 5
2
3 9
Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-70
Algorithm DijkstraDistances(G, s)Q ← new heap-based priority queuefor all v ∈ G.vertices()
if v = ssetDistance(v, 0)
elsesetDistance(v, ∞∞∞∞)
l ← Q.insert(getDistance(v), v)setLocator(v,l)
while ¬Q.isEmpty()u ← Q.removeMin()for all e ∈ G.incidentEdges(u)
{ relax edge e }z ← G.opposite(u,e)r ← getDistance(u) + weight(e)if r < getDistance(z)
setDistance(z,r) Q.replaceKey(getLocator(z),r)
Dijkstra’s Algorithm
• A priority queue stores thevertices outside the cloud
– Key: distance– Element: vertex
• Locator-based methods– insert(k,e) returns a locator– replaceKey(l,k) changes the key
of an item• We store two labels with each
vertex:– distance– locator in priority queue

Albert Chanhttp://www.scs.carleton.ca/~achan
School of Computer Science, Carleton UniversityCOMP 2002/2402 Introduction to Data Structures and Data Types
Version 03.s11-71
Analysis• Graph operations
– Method incidentEdges is called once for each vertex• Label operations
– We set/get the distance and locator labels of vertex z O(deg(z)) times– Setting/getting a label takes O(1) time
• Priority queue operations– Each vertex is inserted once into and removed once from the priority queue, where
each insertion or removal takes O(log n) time– The key of a vertex in the priority queue is modified at most deg(w) times, where
each key change takes O(log n) time• Dijkstra’s algorithm runs in O((n + m) log n) time provided the graph is
represented by the adjacency list structure– Recall that ΣΣΣΣv deg(v) = 2m
• The running time can also be expressed as O(m log n) since the graph isconnected


















