
GPS (Global Positioning System - Autenticação · da degradação das efemérides radiodifundidas....
16
1 GPS (Global Positioning System) “ Imagine, accurate positioning dropping right out of the sky at the touch of a button!” Jeff Hurn for Trimble Navigation, 1993 1. Introdu 1. Introdução ão 2. Segmentos do GPS 3. Estrutura do sinal GPS 4. Posicionamento com GPS 5. Fontes de erro 6. Precisão do posicionamento 7. Aplicações GPS 8 . Futuro NAVSTAR GPS NAVSTAR GPS NAVigation Satellite Timming And Ranging Global Positioning System desenvolvido pelo Departamento de Defesa dos Estados Unidos (DoD -US Department of Defense) com o objectivo de fornecer informação instantânea sobre a posição, a velocidade e o tempo, praticamente em todos os locais do globo e de forma contínua, e ainda sob quaisquer condições atmosféricas; fornece uma precisão de posicionamento que varia desde os 100 metros, a 5 a 10 metros e uma precisão relativa na ordem do sub-metro e sub-centímetro (que requer uma maior infra- estrutura e um custo superior). Algumas datas importantes: Algumas datas importantes: 1973 - Início do desenvolvimento do GPS; (FASE1) 1978 - Lançamento do primeiro satélite; 1979 - Elaboração mais completa do Sistema; (FASE2) 1983 - Início da utilização dos dados GPS na área da Geodesia; 1985 - Desenvolvimento dos satélites de produção; 1989 - Lançamento do primeiro satélite da segunda geração de satélites (bloco II); 1993 - Sistema foi considerado como completamente operacional. (FASE3) Princ Princí pio b pio básico de posicionamento com GPS sico de posicionamento com GPS Medição das chamadas pseudo-distâncias entre o utilizador e pelo menos 4 satélites. Conhecendo as coordenadas dos satélites num referencial apropriado, podem determinar-se as coordenadas da estação (X, Y, Z) e o tempo GPS (t). X, Y, Z, t Do ponto de vista geométrico, apenas 3 medições de distâncias seriam suficientes; no entanto, é necessária uma quarta observação dado que os relógios dos receptores não estão sincronizados com os relógios dos satélites. Este erro de sincronização é a razão pela qual se designa pseudo-distância.
Transcript of GPS (Global Positioning System - Autenticação · da degradação das efemérides radiodifundidas....
1
GPS (Global Positioning System)
“ Imagine, accurate positioning dropping right out of the sky at the touch of a button!”
Jeff Hurn for Trimble Navigation, 1993
1. Introdu1. Introduççãoão
2. Segmentos do GPS
3. Estrutura do sinal GPS
4. Posicionamento com GPS
5. Fontes de erro
6. Precisão do posicionamento
7. Aplicações GPS
8 . Futuro
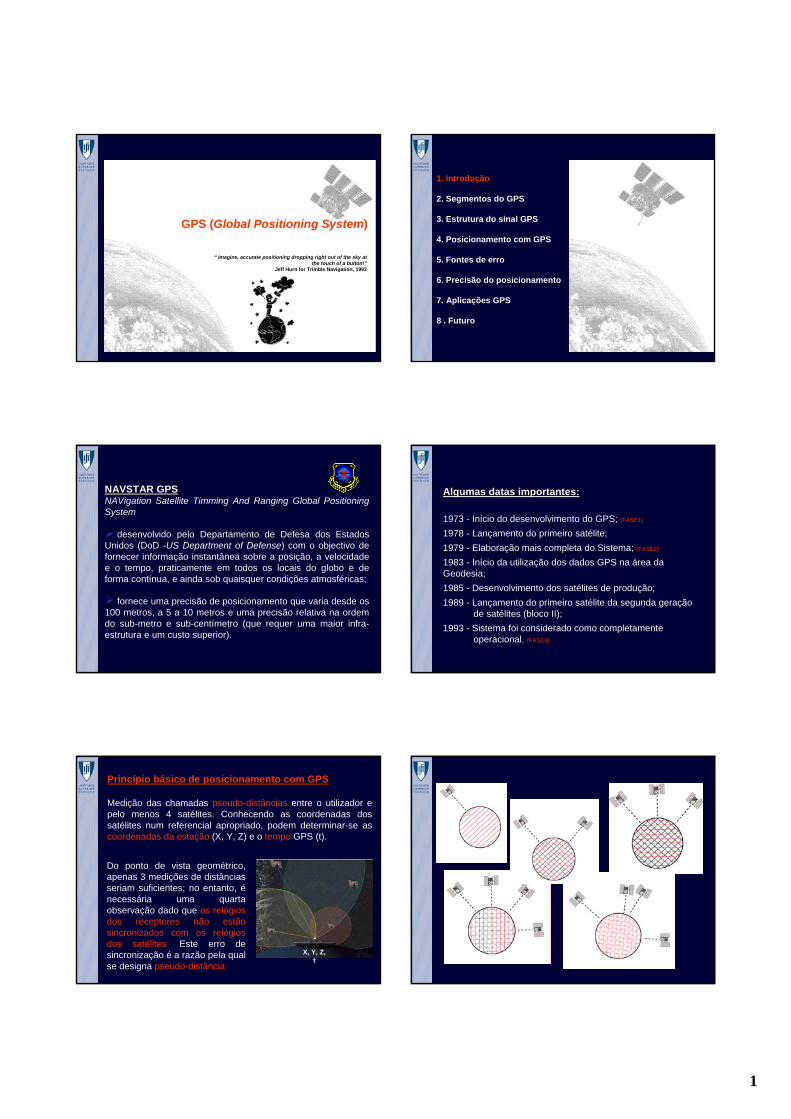
NAVSTAR GPSNAVSTAR GPSNAVigation Satellite Timming And Ranging Global PositioningSystem
desenvolvido pelo Departamento de Defesa dos Estados Unidos (DoD -US Department of Defense) com o objectivo de fornecer informação instantânea sobre a posição, a velocidade e o tempo, praticamente em todos os locais do globo e de forma contínua, e ainda sob quaisquer condições atmosféricas;
fornece uma precisão de posicionamento que varia desde os 100 metros, a 5 a 10 metros e uma precisão relativa na ordem do sub-metro e sub-centímetro (que requer uma maior infra-estrutura e um custo superior).
Algumas datas importantes:Algumas datas importantes:
1973 - Início do desenvolvimento do GPS; (FASE1)
1978 - Lançamento do primeiro satélite;1979 - Elaboração mais completa do Sistema; (FASE2)
1983 - Início da utilização dos dados GPS na área da Geodesia;1985 - Desenvolvimento dos satélites de produção; 1989 - Lançamento do primeiro satélite da segunda geração
de satélites (bloco II);1993 - Sistema foi considerado como completamente
operacional. (FASE3)
PrincPrincíípio bpio báásico de posicionamento com GPSsico de posicionamento com GPS
Medição das chamadas pseudo-distâncias entre o utilizador e pelo menos 4 satélites. Conhecendo as coordenadas dos satélites num referencial apropriado, podem determinar-se ascoordenadas da estação (X, Y, Z) e o tempo GPS (t).
X, Y, Z, t
Do ponto de vista geométrico, apenas 3 medições de distâncias seriam suficientes; no entanto, énecessária uma quarta observação dado que os relógios dos receptores não estão sincronizados com os relógios dos satélites. Este erro de sincronização é a razão pela qual se designa pseudo-distância.
2
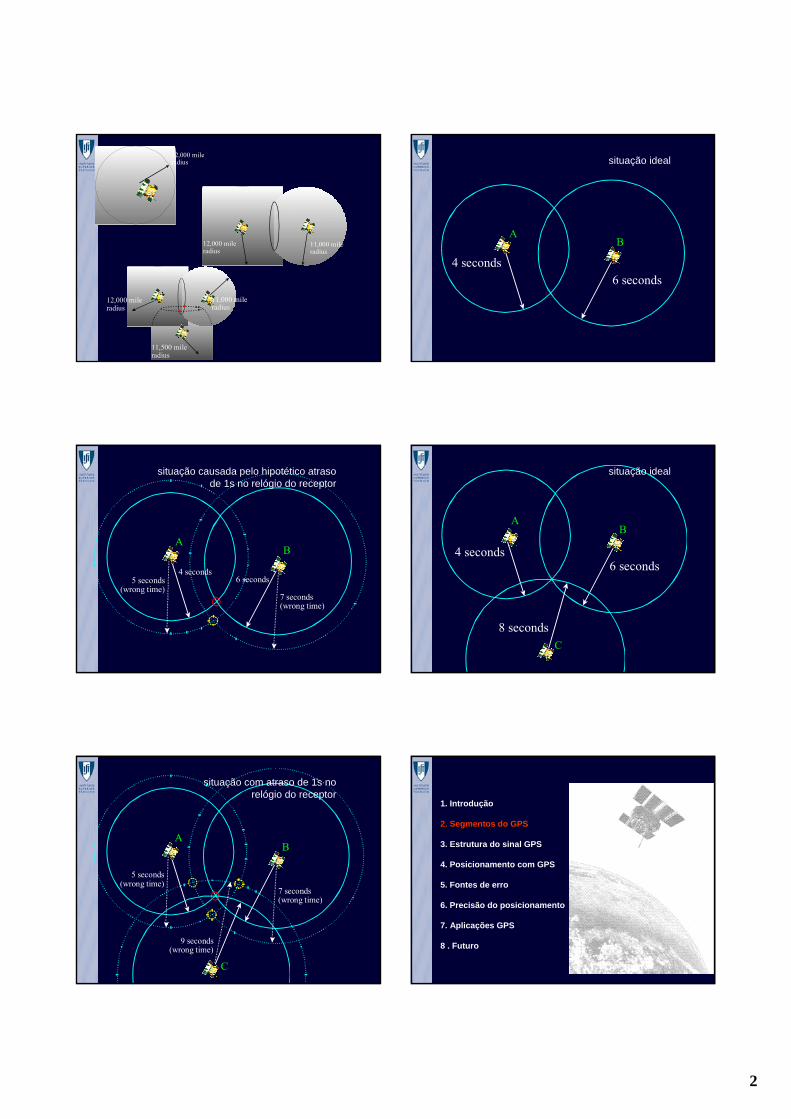
12,000 mileradius
11,000 mileradius
12,000 mileradius
12,000 mileradius
11,500 mileradius
11,000 mileradius
6 seconds4 seconds
AB
situação ideal
6 seconds4 seconds
5 seconds(wrong time)
7 seconds(wrong time)
AB
situação causada pelo hipotético atraso de 1s no relógio do receptor
6 seconds4 seconds
8 seconds
AB
C
situação ideal
5 seconds(wrong time)
7 seconds(wrong time)
9 seconds(wrong time)
BA
C
situação com atraso de 1s no relógio do receptor
1. Introdução
2. Segmentos do GPS2. Segmentos do GPS
3. Estrutura do sinal GPS
4. Posicionamento com GPS
5. Fontes de erro
6. Precisão do posicionamento
7. Aplicações GPS
8 . Futuro
3
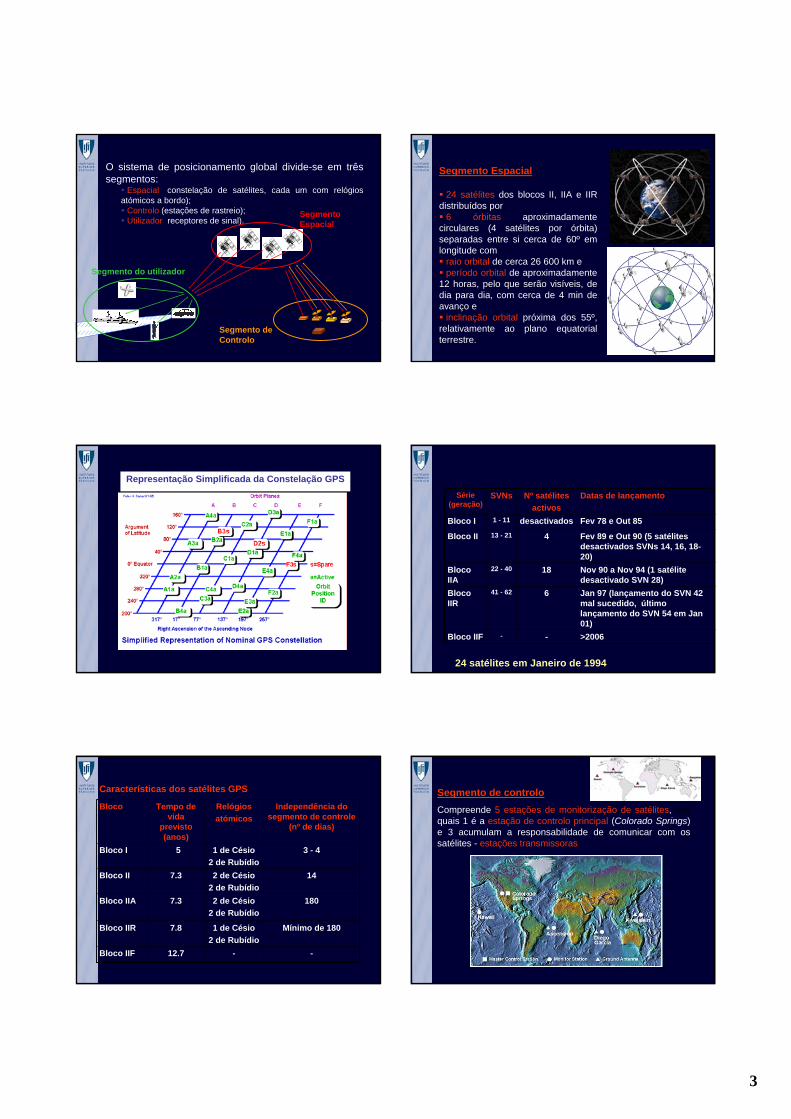
O sistema de posicionamento global divide-se em três segmentos:
Espacial (constelação de satélites, cada um com relógios atómicos a bordo);
Controlo (estações de rastreio);Utilizador (receptores de sinal).
Segmento Espacial
Segmento do utilizador
Segmento de Controlo
Segmento EspacialSegmento Espacial
24 satélites dos blocos II, IIA e IIR distribuídos por
6 órbitas aproximadamente circulares (4 satélites por órbita) separadas entre si cerca de 60º em longitude com
raio orbital de cerca 26 600 km eperíodo orbital de aproximadamente
12 horas, pelo que serão visíveis, de dia para dia, com cerca de 4 min de avanço e
inclinação orbital próxima dos 55º, relativamente ao plano equatorial terrestre.
Representação Simplificada da Constelação GPS
-
6
18
4
desactivados
Nº satélitesactivos
Datas de lançamentoSVNsSérie (geração)
>2006-Bloco IIF
Jan 97 (lançamento do SVN 42 mal sucedido, último lançamento do SVN 54 em Jan01)
41 - 62Bloco IIR
Nov 90 a Nov 94 (1 satélite desactivado SVN 28)
22 - 40Bloco IIA
Fev 89 e Out 90 (5 satélites desactivados SVNs 14, 16, 18-20)
13 - 21Bloco II
Fev 78 e Out 851 - 11Bloco I
24 satélites em Janeiro de 1994
Características dos satélites GPS
-
1 de Césio2 de Rubídio
2 de Césio2 de Rubídio
2 de Césio2 de Rubídio
1 de Césio2 de Rubídio
Relógiosatómicos
Independência do segmento de controle
(nº de dias)
Tempo de vida
previsto (anos)
Bloco
-12.7Bloco IIF
Mínimo de 1807.8Bloco IIR
1807.3Bloco IIA
147.3Bloco II
3 - 45Bloco I
Segmento de controloSegmento de controloCompreende 5 estações de monitorização de satélites, das quais 1 é a estação de controlo principal (Colorado Springs) e 3 acumulam a responsabilidade de comunicar com os satélites - estações transmissoras.
4
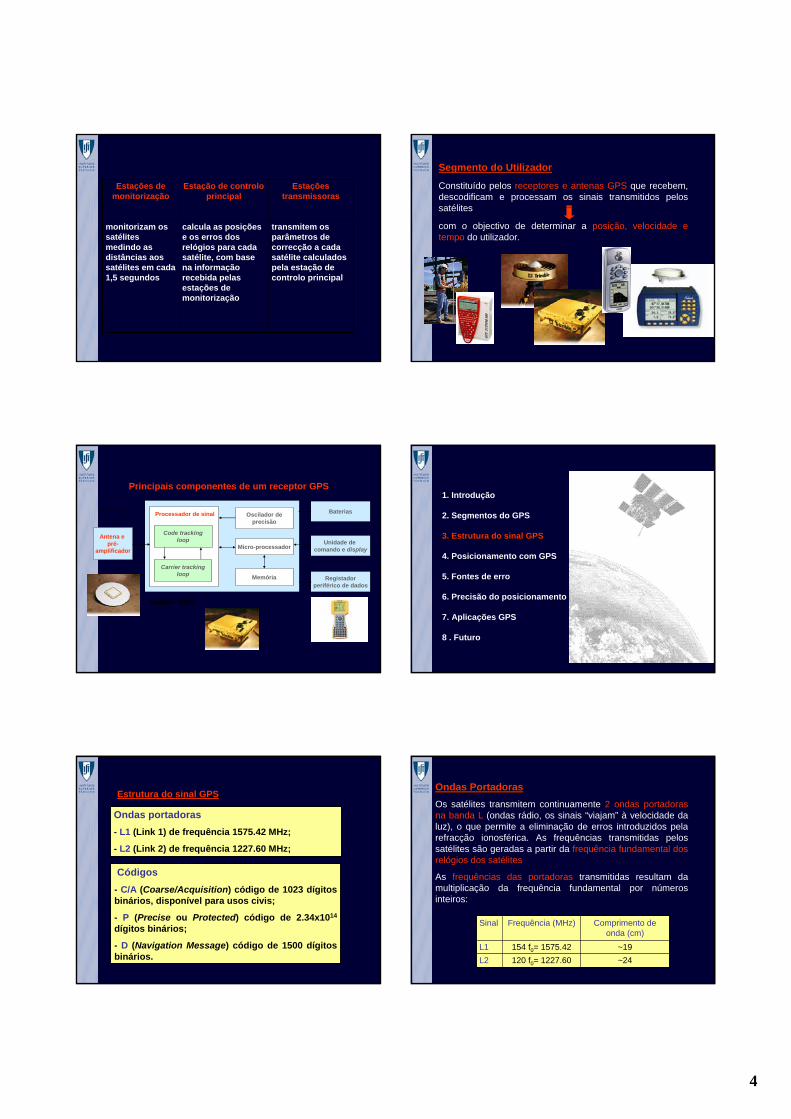
transmitem os parâmetros de correcção a cada satélite calculados pela estação de controlo principal
calcula as posições e os erros dos relógios para cada satélite, com base na informação recebida pelas estações de monitorização
monitorizam os satélites medindo as distâncias aos satélites em cada 1,5 segundos
Estações transmissoras
Estação de controlo principal
Estações de monitorização
Segmento do UtilizadorSegmento do Utilizador
Constituído pelos receptores e antenas GPS que recebem, descodificam e processam os sinais transmitidos pelos satélites
com o objectivo de determinar a posição, velocidade e tempo do utilizador.
Principais componentes de um receptor GPS
Unidade de comando e display
Registadorperiférico de dados
Antena e pré-
amplificador
Code trackingloop
Carrier trackingloop
Processador de sinal Oscilador deprecisão
Micro-processador
Memória
Baterias
Seeber 1993
1. Introdução
2. Segmentos do GPS
3. Estrutura do sinal GPS3. Estrutura do sinal GPS
4. Posicionamento com GPS
5. Fontes de erro
6. Precisão do posicionamento
7. Aplicações GPS
8 . Futuro
Estrutura do sinal GPSEstrutura do sinal GPS
Códigos- C/A (Coarse/Acquisition) código de 1023 dígitos binários, disponível para usos civis;
- P (Precise ou Protected) código de 2.34x1014
dígitos binários;
- D (Navigation Message) código de 1500 dígitos binários.
Ondas portadoras- L1 (Link 1) de frequência 1575.42 MHz;
- L2 (Link 2) de frequência 1227.60 MHz;
Ondas PortadorasOndas PortadorasOs satélites transmitem continuamente 2 ondas portadoras na banda L (ondas rádio, os sinais “viajam” à velocidade da luz), o que permite a eliminação de erros introduzidos pela refracção ionosférica. As frequências transmitidas pelos satélites são geradas a partir da frequência fundamental dos relógios dos satélites
As frequências das portadoras transmitidas resultam da multiplicação da frequência fundamental por números inteiros:
~24120 f0= 1227.60L2~19154 f0= 1575.42L1
Comprimento de onda (cm)
Frequência (MHz)Sinal

5
Ambiguidade
Fase medida
UTILIZAÇÃO DA ONDA PORTADORAUTILIZAÇÃO DA ONDA PORTADORAnnúúmero completo e inteiro de ciclos desde o momento mero completo e inteiro de ciclos desde o momento da emissão atda emissão atéé àà receprecepçção da fase da onda portadoraão da fase da onda portadora
CCóódigosdigos
Comp. onda
Modulado emFrequênciaCódigos
6 kmL1 e L250 HzD (NavigationMessage)
300 mL1fo/10 = 1.023 MHz
C/A (Coarse/Acquisition)
30 mL1 e L2fo = 10.23 MHzP (Precise)
Mensagem de navegaMensagem de navegaççãoãoA informação transmitida na mensagem de navegação consta do seguinte:
efemérides radiodifundidas com a descrição da órbita do satélite e dados do relógio do satélite;
almanaque com a descrição aproximada das órbitas dos restantes satélites e do estado de funcionamento de toda a constelação;
parâmetros representando o atraso causado pela propagação do sinal através da ionosfera, i. e. correcções ionosféricas para utilizadores de uma frequência;
dados para a conversão de base de tempo GPS em base de tempo UTC;
informação para auxílio da aquisição do código P;
qualidade dos dados transmitidos.
ServiServiçço de Posicionamento GPSo de Posicionamento GPS
Serviço de posicionamento preciso (PPS – Precise Positioning Service)• opera em ambas as frequências e usa o código P, permitindo uma maior precisão no posicionamento, sendo essencialmente utilizado para fins militares;
• o acesso a este serviço é controlado através da técnica criptográfica denominada anti-sabotagem (SA - Anti Spoofing).
Serviço de posicionamento padrão (SPS – Standard Positioning Service)
• opera apenas em L1 e usa o código C/A;
• o acesso a este serviço era controlado pelo acesso selectivo (SA - Selective Availability) até 1/Maio/2000.
Acesso Selectivo (SA)Acesso Selectivo (SA)Técnica implantada pelo DoD para reduzir a precisão da informação GPS (posição, velocidade e tempo), através da introdução de erros pseudo-aleatórios no relógio do satélite e da degradação das efemérides radiodifundidas.
O SA foi entretanto removido em 1 Maio de 2000, pelo que actualmente o SPS disponibiliza uma precisão muito semelhante à dada pelo PPS
Precisão em tempo real para os utilizadores não autorizadosAcesso Selectivo
340 nanosegundosTransf. de tempo para UTC156 metrosPosicionamento vertical100 metrosPosicionamento horizontal
AntiAnti--SabotagemSabotagem (AS = (AS = antianti--spoofingspoofing))Técnica implantada pelo DoD para impedir que os receptores GPS sejam enganados por sinais falsos e que utilizadores não autorizados façam medições directas em L2. Em condições de AS, o código P é substituído pelo código Y (de características similares às do código P) ao qual apenas podem aceder utilizadores autorizados usando uma chave criptográfica.
Esta técnica foi activada às 0h UT do dia 31 de Janeiro de 1994 e permanece em operação contínua desde essa data, afectando todos os satélites do Bloco II.
Precisão em tempo real (a 95%) para os utilizadores autorizadosAnti-Sabotagem
200 nanosegundosTransf. de tempo para UTC27.7 metrosPosicionamento vertical22 metrosPosicionamento horizontal

6
EfemEfeméérides radiodifundidasrides radiodifundidasas efemérides são baseadas numa órbita de referência
determinada pela estação de controlo principal, com base nos dados de rasteio das estações monitoras,
a partir da informação orbital radiodifundida na mensagem de navegação, é calculada a posição geocêntrica do satéliteno sistema WGS84 usando algoritmos publicados pelo GPS Interface Control Document.
EfemEfeméérides prides póóss--processadasprocessadasPara aplicações geodésicas de alta precisão e estudos de geodinâmica, a precisão fornecida pelas órbitas radiodifundidas não é, em geral, adequada. Em alternativa, dados recolhidos por uma rede global de estações, com coordenadas bem definidas (por técnicas independentes), são usados para gerar órbitas precisas(órbitas determinadas a posteriori).
Uma das instituições que faz regularmente a determinação de órbitas de alta precisão é oInternational GPS Service (IGS), disponibilizando essa informação gratuitamente à comunidade científica -http://igscb.jpl.nasa.gov.
Pseudo-distância (diferença temporal do código)
Observável GPS básica que todos os tipos de receptorpodem registar. Utiliza os códigos C/A e P.
ObservObservááveis GPSveis GPS
Fase de batimento da onda portadora (diferença de fase)
Observável GPS usada em aplicações que requerem grande exactidão (pelo menos da ordem do centímetro) como a Geodesia e a Topografia.
PseudoPseudo--distânciadistânciaO receptor regista o tempo que um código leva a percorrer adistância entre o satélite e o receptor (dτ). Este tempo é entãomultiplicado pela velocidade da luz para ser convertido numadistância.
O receptor compara o código enviado por um dado satélite com uma réplica exacta do código gerada pelo próprio receptor, a correlação dos códigos permite a determinação do atraso do sinal proveniente do satélite e a consequente determinação da pseudo-distância.
dτTimedifference
sincronizados (embora não
perfeitamente...)
No entanto, hNo entanto, háá um problema:um problema:
Os relógios do receptor e do satélite não estão em perfeita sincronia, o que introduz um desfasamento no tempo que actua como um erro na distância ao satélite, daí que se denomine pseudo-distância.
Este erro é facilmente calculado, dado que todas as pseudo-distâncias a diferentes satélites têm o mesmo desfasamento de tempo para uma mesma época de registo.
Com 4 satélites pode-se fixar a posição e tempo (3 para determinar as coordenadas e 1 para o tempo).
Apesar de não ser tão precisa quanto a diferença de fase da onda portadora, a observável pseudo-distância étambém útil na:
sincronização dos relógios dos receptores;
resolução de ambiguidades;
reparação de saltos de ciclo nas observações de fase;
na estimação das órbitas dos satélites (como complemento às observações de fase).
7
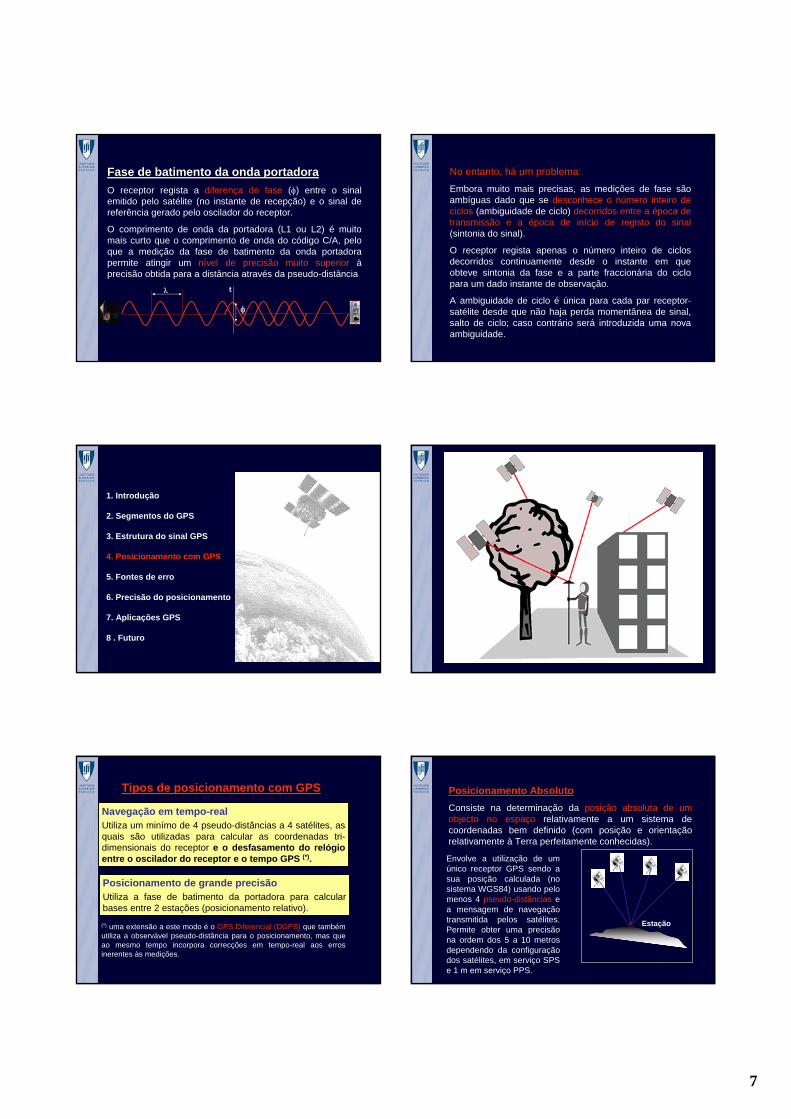
Fase de batimento da onda portadoraFase de batimento da onda portadoraO receptor regista a diferença de fase (φ) entre o sinal emitido pelo satélite (no instante de recepção) e o sinal de referência gerado pelo oscilador do receptor.
O comprimento de onda da portadora (L1 ou L2) é muito mais curto que o comprimento de onda do código C/A, pelo que a medição da fase de batimento da onda portadora permite atingir um nível de precisão muito superior àprecisão obtida para a distância através da pseudo-distância.
λ
φ
t
No No entantoentanto, , hháá umum problemaproblema::
Embora muito mais precisas, as medições de fase são ambíguas dado que se desconhece o número inteiro de ciclos (ambiguidade de ciclo) decorridos entre a época de transmissão e a época de início de registo do sinal(sintonia do sinal).
O receptor regista apenas o número inteiro de ciclos decorridos continuamente desde o instante em que obteve sintonia da fase e a parte fraccionária do ciclo para um dado instante de observação.
A ambiguidade de ciclo é única para cada par receptor-satélite desde que não haja perda momentânea de sinal, salto de ciclo; caso contrário será introduzida uma nova ambiguidade.
1. Introdução
2. Segmentos do GPS
3. Estrutura do sinal GPS
4. Posicionamento com GPS4. Posicionamento com GPS
5. Fontes de erro
6. Precisão do posicionamento
7. Aplicações GPS
8 . Futuro
Navegação em tempo-realUtiliza um minímo de 4 pseudo-distâncias a 4 satélites, as quais são utilizadas para calcular as coordenadas tri-dimensionais do receptor e o desfasamento do relógioentre o oscilador do receptor e o tempo GPS (*).
Tipos de posicionamento com GPSTipos de posicionamento com GPS
Posicionamento de grande precisãoUtiliza a fase de batimento da portadora para calcularbases entre 2 estações (posicionamento relativo).
(*) uma extensão a este modo é o GPS Diferencial (DGPS) que tambémutiliza a observável pseudo-distância para o posicionamento, mas que ao mesmo tempo incorpora correcções em tempo-real aos errosinerentes às medições.
Posicionamento AbsolutoPosicionamento AbsolutoConsiste na determinação da posição absoluta de um objecto no espaço relativamente a um sistema de coordenadas bem definido (com posição e orientação relativamente à Terra perfeitamente conhecidas).
Envolve a utilização de um único receptor GPS sendo a sua posição calculada (no sistema WGS84) usando pelo menos 4 pseudo-distâncias e a mensagem de navegação transmitida pelos satélites. Permite obter uma precisão na ordem dos 5 a 10 metros dependendo da configuração dos satélites, em serviço SPSe 1 m em serviço PPS.
Estação

8
ReceptoresReceptoresGPS Diferencial (DGPS)GPS Diferencial (DGPS)O GPS diferencial baseia-se no conceito de que os erros na posição absoluta de um dado ponto são similares aos de outros pontos numa dada área (local).
Registando medições GPS numdado ponto de coordenadasconhecidas, esses erros podem serquantificados.
Consequentemente, podem aplicar-se correcções aos outros pontos. Aplicando estas correcções emtempo real, a precisão do GPS para posicionamento instantâneo éreduzida para 1 a 2 metros, podendo mesmo ser atingida umaprecisão sub-métrica comreceptores de gama superior.
Estação base Estação
remota
Receptores para GGPS Receptores para GGPS (tempo real ou p(tempo real ou póóss--processado)processado)
Posicionamento RelativoPosicionamento RelativoConsiste na determinação do vector posição, com origem num ponto de coordenadas conhecidas (estação base) e com extremidade num ponto (ou mais pontos) para o qual se pretende determinar as coordenadas.
Envolve também a utilização de 2 receptores (ou mais), um que permanece fixo na estação base, para a qual se conhecem as coordenadas, e outro (ou outros) que se coloca no ponto a coordenar, devendo ser efectuadas medições simultâneas em pseudo-distância e/ou fase da portadora.
Estação Base
(X,Y,Z)
∆X
∆Y
Estação Remota
(X’,Y’,Z’)
Vector posição
(X’,Y’,Z’) =(X,Y,Z)+(∆X, ∆Y, ∆Z)
∆Z
Estático
Posicionamento RelativoPosicionamento Relativo
ConvencionalEstático rápido
CinemáticoTempo Real (RTK)Pós-processado
BaseBaseBAA
Observaçõesprocessadasem conjunto
Observaçõesprocessadasem conjunto
Modo EstáticoModo Estático
Modo Rápido-EstáticoModo Rápido-Estático
.Para bases longas (>20Km), onde éexigida a maior precisão possível.Técnica indicada para implementação de redes geodésicas.Técnica ideal para grandes áreas
.Para bases com comprimento até20Km.Curtos períodos de ocupação.O mais utilizado para grande produtividade de trabalho

9
CinemáticoCinemáticoUtilizado para caracterização da trajectória de um objecto em movimento (medições contínuas)
Muito útil para levantamento de eixos de via e completagemcartográfica, entre outras aplicações
RTK - Cinemático em Tempo RealRTK - Cinemático em Tempo RealNão é necessário o pós-processamento
Resultados disponíveis no momento da observação
1. Introdução
2. Segmentos do GPS
3. Estrutura do sinal GPS
4. Posicionamento com GPS
5. Fontes de erro5. Fontes de erro
6. Precisão do posicionamento
7. Aplicações GPS
8 . FuturoAtraso troposférico
Acesso selectivo
Atraso ionosféricoMeio de propagação
Variação do centro de fase das antenas
Erros de multitrajectoAntenas
Ruído do receptor (circuitos eléctricos)
Erros nos relógios dos receptores (muito maiores do que os erros dos relógios dos satélites)
Receptores
Erros nos relógios dos satélite
Erros orbitais (erros nas efemérides dos satélites)
Satélites
Erros orbitais (Erros nas efemErros orbitais (Erros nas efeméérides)rides)
CAUSAA imprecisão das posições e velocidades iniciais dos satélites, causada por erros nas coordenadas das estações de rastreio e pela utilização de modelos de força (que descrevem as perturbações da órbita dos satélites) pouco precisos, resulta em erros na determinação das órbitas dos satélites.
SOLUÇÃOUtilização de efemérides de precisão (pós-processadas), tais como as geradas pelo IGS, com precisão inferior a 20 cm, em alternativa às efemérides radiodifundidas, contidas na mensagem de navegação enviada por cada satélite, com precisão superior a 15 m.
Erros nos relErros nos relóógios dos satgios dos satééliteslites
CAUSAOs relógios atómicos instalados nos satélites (2 de rubídio e 2 de césio) apresentam desfasamentos em relação ao tempo GPS (GPST).
SOLUÇÃO• dado que o erro no relógio do satélite é comum a todos os observadores que observem esse mesmo satélite, este erro pode ser eliminado formando diferenças simples entre receptores ou diferenças duplas;
• pode ser praticamente eliminado por estimação dos parâmetros do relógio (desfasamento e deriva) com base em modelos matemáticos.
• por aplicação dos coeficientes de correcção ao relógio do satélite constante na mensagem de navegação pode reduzir-se o erro a apenas alguns nanosegundos.

10
Acesso selectivoAcesso selectivo
CAUSAImplementação de uma técnica que reduz a precisão da informação GPS através da introdução de erros pseudo-aleatórios no relógio do satélite e da degradação das efemérides radiodifundidas.
O acesso selectivo foi entretanto removido em 1 Maio de 2000.
Erros nos relErros nos relóógios dos receptoresgios dos receptores
CAUSAOs receptores GPS estão equipados com relógios de quartzo, os quais apresentam desfasamentos em relação ao tempo GPS.
SOLUÇÃO• pode ser eliminado formando diferenças simples entre satélites ou diferenças duplas;
• pode ser praticamente eliminado por estimação dos parâmetros do relógio (desfasamento e deriva) com base em modelos matemáticos.
RuRuíído dos receptoresdo dos receptores
CAUSAO ruído dos receptores (desvio padrão) associado a cada tipo de medição resulta das limitações inerentes àelectrónica dos componentes do receptor. Em regra geral, o ruído das observações é cerca de 1% do comprimento de onda do sinal (cerca de 2 mm para as medições de fase).
SOLUÇÃOUtilização de receptores mais recentes e de gama superior, tais como os SNR-8100 TurboRogue usados nas estações que constituem a rede IGS, os quais permitem uma precisão de 0.2 mm e de 0.3 mm para a medição de fase em L1 e L2, respectivamente.
Erros de multitrajectoErros de multitrajectoCAUSAEm adição ao sinal que ‘viaja’ directamente do satélite até àantena do receptor, existem sinais reflectidos por objectos(edifícios, carros, etc.) que se encontram perto da antena e que interferem com o sinal verdadeiro. Outros factores que afectam o multitrajecto são a geometria dos satélites e as características das antenas.
SOLUÇÃO• em modo relativo estático, o erro de multitrajecto pode ser reduzido usando sessões de observação longas;
• em modo cinemático e rápido-estático, o erro de multitrajecto pode ser significativo, pelo que em aplicações GPS de precisão devem ser usadas antenas “choke ring” por proporcio-narem um baixo nível de multitrajecto.
VariaVariaçção do centro de fase da antenaão do centro de fase da antena
CAUSAEstas variações são função da construção e das características da antena e dependem do ângulo de direcção do sinal observado. Tais variações podem atingir alguns centímetros para alguns tipos de antenas.
SOLUÇÃO• antenas orientadas espacialmente de modo semelhante(base simples) para minimizar este efeito;
• utilização de antenas “choke ring” por possuírem um baixo grau de variação do centro de fase.

11
Atraso Atraso ionosfionosfééricorico
CAUSAA ionosfera, comprendida aproximadamente entre os 50-1000 km, afecta a propagação das ondas rádio. A sua influência, que depende da localização geográfica, da hora do dia, da actividade solar e da frequência dos sinais rádio, faz com que a velocidade de propagação da fase portadora aumente para além da velocidade da luz, avanço de fase, e que a velocidade de propagação da onda modulada diminua de igual quantidade, atraso de código.
SOLUÇÃO• pode ser praticamente eliminado combinando observações em 2 frequências distintas, i. e. combinação linear livre da ionosfera;
• pode ser reduzido utilizando os coeficientes, contidos na mensagem de navegação, num dos diversos modelosdesenvolvidos para modelar o efeito da ionosfera.
Retardamento ionosféricoRetardamento ionosférico Retardamento ionosféricoRetardamento ionosférico
Atraso troposfAtraso troposfééricorico
CAUSAPara além da ionosfera, a propagação das ondas rádio é ainda afectada pela camada electricamente neutra da atmosfera(troposfera e estratosfera).
Como a troposfera é responsável por mais do que 75% do efeito total da atmosfera electricamente neutra (dado que contém praticamente toda a massa e todo o vapor de água), o efeito desta camada é designado por efeito da troposfera.
Contrariamente à ionosfera, a troposfera é um meio dispersivo para frequências rádio, ou seja, o seu efeito na fase e no código é equivalente provocando o atraso de fase e do código, pelo que não é possível remover o seu efeito usando 2 frequências. O atraso troposférico é causado por duas componentes, a componente seca da refractividade e a componente húmida.
SOLUÇÃO• a componente seca, que representa mais do que 90% do atraso troposférico total, pode ser determinada com grande precisão a partir de medições da pressão atmosférica assumindo um bom modelo e ausência de erros na medição da pressão;
• a componente húmida, devida ao efeito do vapor de água , embora contribuindo com menos de 10%, contribui com um maior erro dado que a variação do vapor de água na atmosfera é difícil de modelar, podendo ser determinada pela:
i) utilização de modelos baseados em parâmetros meteorológicos, que conduzem geralmente a uma determinação pouco fiável;
ii) utilização de radiómetros de vapor de água (WVR -Water Vapor Radiometer);
iii) estimação estocástica durante o processo de ajustamento.

12
Ru
Ru íí
do d
o do
do
Rec
ept
Rec
ept ..
Mul
titra
ject
oM
ultit
raje
cto
Rel
Rel
óó gio
s gi
os S
atSat
éé ll..
Trop
osfe
raTr
opos
fera
Efe
mE
fem
éé rid
esrid
es
Iono
sfer
aIo
nosf
era
Rel
Rel
óó gio
gi
o R
ecep
tR
ecep
t ..
Importância relativa dasfontes de erroImportância relativa dasfontes de erro 1. Introdução
2. Segmentos do GPS
3. Estrutura do sinal GPS
4. Posicionamento com GPS
5. Fontes de erro
6. Precisão do posicionamento
7. Aplicações GPS
8 . Futuro
A precisão com que as posições podem ser determinadas com GPS, nomeadamente em modo absoluto, depende de 2 factores, ambos variáveis em função do tempo:
Precisão da medição da distância receptor-satélite;
Geometria da configuração dos satélites.
Precisão da mediPrecisão da mediçção da distância receptorão da distância receptor--satsatéélitelite
O termo usualmente utilizado para representar a precisão de uma medição receptor-satélite é chamado UERE (UserEquivalent Range Error) e representa o efeito combinado dos:
• erros das efemérides;• erros de propagação;• erros dos relógios;• ruído do receptor.
O UERE difere de satélite para satélite em cada instante,devido às variações que sofre cada um dos erros parciais, e só assume uma distribuição normal e semelhante para cada satélite da constelação a longo prazo (dias a meses).
Geometria da configuraGeometria da configuraçção dos satão dos satééliteslitesA contribuição da geometria da configuração dos satélites na precisão do posicionamento é expressa pelo factor de degradação de precisão (DOP – Dilution Of Precision), que é a razão entre a precisão do posicionamento, σ, e a precisão inerente às observações, σ0:
Existem diversos factores DOP:0
DOPσσ
=
σG= GDOP. σ0DOP de Posição (3D) e Tempo
σHT= HTDOP. σ0DOP Horizontal e Tempo
σP= PDOP. σ0DOP de Posição (3D)
σH= HDOP. σ0DOP Horizontal (2D)
σV= VDOP. σ0DOP Vertical
O factor DOP varia com o tempo (devido ao movimento dos satélites) e com a localização geográfica e deverá ser o mais pequeno possível.
O GDOP constitui um bom critério para a selecção dos 4 melhores satélites visíveis, dado que existe uma grande correlação entre o volume do tetraedro formado pelos vectores que ligam o receptor aos diferentes satélites:
• um GDOP elevado está associado a uma geometria de configuração em que os satélites estão muito próximos;
•um GDOP muito baixo está geralmente associado a uma constelação com um dos satélites sobre o observador e os outros 3 satélites igualmente espaçados em azimute no horizonte (volume máximo).
13
1. Introdução
2. Segmentos do GPS
3. Estrutura do sinal GPS
4. Posicionamento com GPS
5. Fontes de erro
6. Precisão do posicionamento
7. Aplica7. Aplicaçções GPSões GPS
8 . Futuro
NavegaNavegaçção GPS em terraão GPS em terramonitorização de carros, taxis e
veículos que transportem cargas perigosas ou valiosas;
monitorização de frotas: transportes públicos e veículos de entregas;
apoio a veículos de emergência: ambulâncias, carros de bombeiros e de polícia;
aplicações recreativas: orientação e caminhada.
AplicaçõesAplicações
NavegaNavegaçção GPS no marão GPS no marnavegação costeira ou oceânica assistida;
levantamentos hidrográficos;
operações de busca e salvamento;
monitorização de frotas de pesca ou de navios de transporte de material poluente;
levantamentos geofísicos em alto mar (sismicidade e gravidade);
aplicações recreativas: vela e pesca.
NavegaNavegaçção GPS no arão GPS no arsistemas de segurança contra colisões;
operações de busca e salvamento;
determinação de órbitas;
apoio à descolagem e aterragem e navegação em rotas.
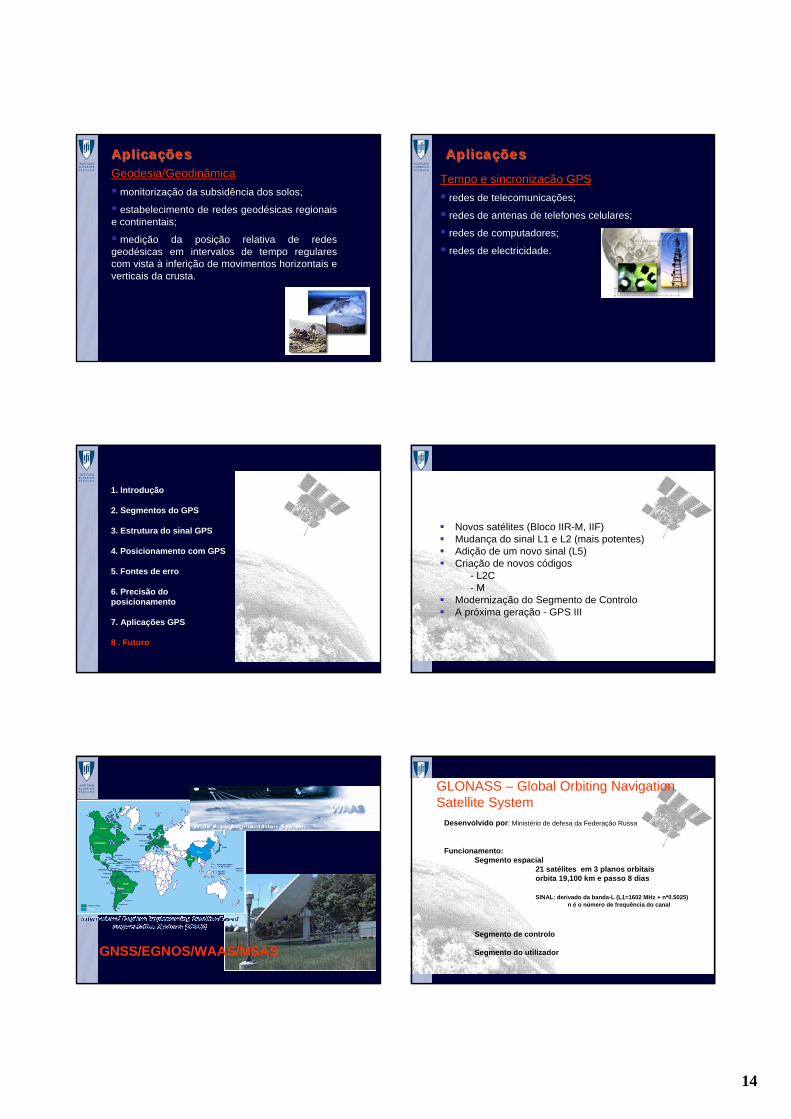
AplicaçõesAplicaçõesLevantamentos GPSLevantamentos GPS
controlo fotogramétrico (aéreo e terrestre);
levantamentos arqueológicos;
cadastro e redes urbanas;
levantamento e gestão de infra-estruturas (estradas e auto-estradas);
levantamentos de engenharia (construção de edifícios, pontes e estradas).
observação de estruturas
AplicaçõesAplicações
Cartografia GPSCartografia e gestão de recursos naturais
inventário de árvores;
habitat animal;
tipos de vegetação;
espécies ameaçadas;
delimitação de lagos e rios.
Cartografia de desastres naturaissismos;tornados;fogos;cheias.
AplicaçõesAplicações
GPS na agriculturaGPS na agriculturadelimitação de parcelas agrícolas;
levantamentos de canais de irrigação;
localização de poços ou furos de água;
delimitação de culturas danificadas.
AplicaçõesAplicações
14
Geodesia/GeodinâmicaGeodesia/Geodinâmicamonitorização da subsidência dos solos;
estabelecimento de redes geodésicas regionais e continentais;
medição da posição relativa de redes geodésicas em intervalos de tempo regulares com vista à inferição de movimentos horizontais e verticais da crusta.
AplicaçõesAplicações
Tempo e sincronizaTempo e sincronizaçção GPSão GPSredes de telecomunicações;
redes de antenas de telefones celulares;
redes de computadores;
redes de electricidade.
AplicaçõesAplicações
1. Introdução
2. Segmentos do GPS
3. Estrutura do sinal GPS
4. Posicionamento com GPS
5. Fontes de erro
6. Precisão do posicionamento
7. Aplicações GPS
8 . Futuro
Novos satélites (Bloco IIR-M, IIF)Mudança do sinal L1 e L2 (mais potentes)Adição de um novo sinal (L5)Criação de novos códigos
- L2C- M
Modernização do Segmento de ControloA próxima geração - GPS III
GNSS/EGNOS/WAAS/MSAS
GLONASS – Global Orbiting Navigation Satellite System
Desenvolvido por: Ministério de defesa da Federação Russa
Funcionamento:Segmento espacial
21 satélites em 3 planos orbitaisorbita 19,100 km e passo 8 dias
SINAL: derivado da banda-L (L1=1602 MHz + n*0.5025)n é o número de frequência do canal
Segmento de controlo
Segmento do utilizador
15
EGNOS- European Geostationary Navigation Overlay Service( perspectivas: melhorar a precisão posicional de 20m para 2m)
•Segmento espacial
•Três satélites geostacionários
•Inmarsat III Atlantic Ocean region –East ( 15.5ºW)
•ESA ARTEMIS (21.5ºE)
•Inmarsat III F5 (25ºE)
Ainda:
Informação precisa da posição de cada satélite GPS;
Informação sobre os relógios a bordo;
Parâmetros ionosféricos
•Segmento de controlo
34 estações terrestresEstações de controlo principais
•Segmento do utilizador
WAAS – Wide Area Augmention SystemDesenvolvido por: Federal Aviation Administration (FAA) e Department ofTransportation (DOT)
FUNCIONAMENTO:25 estações terrestres localizadas nos EUA; 2 estações de controlo
Recebem a informação GPS, determinam e enviam as correcções a aplicar aos dados GPS ( derivas orbitais, erros do relógio, atrasos ionosféricos e troposféricos)
VALIDADE: América do Norte
Operacional desde Setembro de 2002 : precisão posicional horizontal 1-2 mprecisão posicional vertical 2-3 m
Áreas geográficas com tecnologia WAAS, EGNOS e MSAS
•Segmento espacial
•30 satélites (orbita 23616 km) em três planos orbitais com inclinação de 56º. Cada plano terá 9+1 satélites
•Segmento de controlo
•2 centros principais na Europa central
•Segmento do utilizador
GALILEU – European Satellite Navigation SystemProjecto da Comissão europeia em conjunto com a ESA
Previsão da data de entrada em funcionamento :2013 ?
Galileo is Europe's contribution to the next generation Global Navigation Satellite System. The service will be free at the point of use, but a range of chargeable services with additional features will also be offered. These
additional features would include improved reception, accuracy and availability..

16
CONCLUSÃOCONCLUSÃONo caso civil :
Aumento de precisãoPossibilidade de fazer combinações lineares
Eliminação do efeito da ionosferaMaior facilidade na determinação de ambiguidades
Maior capacidade de protecção contra interferências externasContinuidade de sinal
No caso militar :Maior precisãoMaior protecção contra interferências hostis
BibliografiaBibliografiaAntunes, C. (2002), Sebenta da cadeira de Topografia. Faculdade de
Ciências da Universidade de Lisboa.Marreiros, J.P.R. (2001), Apontamentos sobre o GPS NAVSTAR. Instituto
Hidrográfico.Mendes, V. B. (1999), Notas do curso de GPS. Faculdade de Ciências da
Universidade de Lisboa.Seeber, G. (1993), Satellite Geodesy: Foundations, methods and
applications. Walter de Gruyter & Co.Teunissen, P.J.G. And Kleusberg, A. (1998), GPS for Geodesy. 2nd edition
Springer-Verlag.
Web Web PagesPageshttp://www.geodesia.org/http://www.colorado.edu/geography/gcraft/notes/gps/gps_f.htmlhttp://www.gmat.unsw.edu.au/snap/gps/gps_notes.htmhttp://www.gmat.unsw.edu.au/snap/gps/gps_survey/principles_gps.htmhttp://tycho.usno.navy.mil/gpscurr.html


















