Global Optimization for Scheduling Refinery Crude Oil Operations
44
Global Optimization for Scheduling Refinery Crude Oil Operations Ramkumar Karuppiah a , Kevin C. Furman b and Ignacio E. Grossmann a* a Department of Chemical Engineering, Carnegie Mellon University, Pittsburgh, PA 15213, U.S.A. b ExxonMobil Research and Engineering, Annandale, NJ 08801, U.S.A. April 2007 ABSTRACT In this work we present an Outer-Approximation algorithm to obtain the global optimum of a nonconvex Mixed Integer Nonlinear Programming (MINLP) model for the scheduling of crude oil movement at the front-end of a petroleum refinery. The model relies on a continuous time representation making use of transfer events. The proposed technique focuses on effectively solving a Mixed Integer Linear Programming (MILP) relaxation of the nonconvex MINLP to obtain a rigorous lower bound on the global optimum. Cutting planes derived by spatially decomposing the network are added to the MILP relaxation of the original nonconvex MINLP in order to tighten the lower bound and reduce the solution times for the MILP relaxation. The solution of this problem is used as a heuristic to obtain a feasible solution to the MINLP which serves as an upper bound. The lower and upper bounds are made to converge to within a specified tolerance in the proposed Outer Approximation algorithm. On applying the proposed technique on test examples, significant savings were realized in the computational effort required to obtain the globally optimal solutions and to verify their global optimality. * Corresponding author. Tel.: +1-412-268-2230; Fax: +1-412-268-7139. Email address: [email protected] (I.E. Grossmann)
Transcript of Global Optimization for Scheduling Refinery Crude Oil Operations

Global Optimization for Scheduling Refinery Crude Oil Operations
Ramkumar Karuppiaha, Kevin C. Furmanb and Ignacio E. Grossmanna* a Department of Chemical Engineering, Carnegie Mellon University, Pittsburgh, PA
15213, U.S.A.
b ExxonMobil Research and Engineering, Annandale, NJ 08801, U.S.A.
April 2007
ABSTRACT
In this work we present an Outer-Approximation algorithm to obtain the global
optimum of a nonconvex Mixed Integer Nonlinear Programming (MINLP) model for the
scheduling of crude oil movement at the front-end of a petroleum refinery. The model
relies on a continuous time representation making use of transfer events. The proposed
technique focuses on effectively solving a Mixed Integer Linear Programming (MILP)
relaxation of the nonconvex MINLP to obtain a rigorous lower bound on the global
optimum. Cutting planes derived by spatially decomposing the network are added to the
MILP relaxation of the original nonconvex MINLP in order to tighten the lower bound
and reduce the solution times for the MILP relaxation. The solution of this problem is
used as a heuristic to obtain a feasible solution to the MINLP which serves as an upper
bound. The lower and upper bounds are made to converge to within a specified tolerance
in the proposed Outer Approximation algorithm. On applying the proposed technique on
test examples, significant savings were realized in the computational effort required to
obtain the globally optimal solutions and to verify their global optimality.
*Corresponding author. Tel.: +1-412-268-2230; Fax: +1-412-268-7139. Email address: [email protected] (I.E. Grossmann)

2
Keywords: Refinery scheduling; Nonconvex MINLP; Global optimization; Spatial
decomposition
1. Introduction
Scheduling and planning of the flow of crude oil is a very important problem in a
petroleum refinery due to the potential realization of large cost savings and improved
feeds. Linear programming (LP) models have been historically used in the analysis of
scheduling and planning problems due to their ease of modeling and solution. Refinery
planning problems have been addressed using computational tools such as AspenTech®
PIMS (Process Industry Modeling System) that are largely based on Successive Linear
Programming. However, it is difficult to model refinery operations since they involve
units operating in both batch and continuous modes along with multiple grades of crude
oil and products. Furthermore, detailed scheduling models often require a continuous
time representation and a more general treatment of nonlinear equations, as well as binary
variables to model discrete decisions which give rise to Mixed Integer Nonlinear
Programming (MINLP) models. These models impart additional flexibility to the
problem allowing the modeling of discrete decisions and constraints.
There are two major approaches for modeling scheduling problems: discrete time
formulations and continuous time formulations (Mendez et al., 2006). In discrete time
models, it is relatively easy to model the material balances and the flow constraints.
However, the number of time intervals required for an accurate representation of the
system is usually very high, thus the resulting models are large in size and
computationally challenging. Continuous time models are smaller in comparison and
allow for a complete utilization of the time domain, although it is difficult to synchronize
the material balances and time sequencing constraints in such a representation. Lee et al.
(1996) have proposed a Mixed Integer Linear Programming (MILP) model for short term
scheduling of crude oil using discrete time intervals. Here, they derive a linear
approximation of the nonlinear mixing operations by replacing bilinear terms in the mass
balances by individual component flows. An MILP model has also been developed by
Shah (1996) for crude oil scheduling where the scheduling time horizon is discretized
into intervals of equal duration, where the requirement is that the operations must start
3
and end at the boundaries of the intervals. This approach is more restricted as compared
to that of Lee et al. (1996) since the front end of the refinery is decomposed into two
parts – downstream and upstream, and the models corresponding to these are solved
sequentially. A continuous time formulation has been used by Jia et al. (2003) where the
authors present an MILP model developed by relaxing the nonlinear mixing constraints.
They also include the possiblity of incorporating the bilinear equations, thus making the
model an MINLP formulation. A rigorous extension of this model can be found in
Furman et al. (2006), where the authors use a continuous time event formulation to
schedule fluid transfer between tanks, and model the problem as an MINLP. In this work,
the main idea is to allow both inputs and outputs for a tank in a single transfer event. A
comparison of the discrete and continuous time formulations for scheduling for chemical
processes can be found in Floudas and Lin (2004).
In this work, we apply a novel continuous time formulation given by Furman et
al. (2006) to model the literature test cases given in Lee et al. (1996) for short-term
scheduling of crude oil at the front-end of a refinery as an MINLP. This scheduling
problem involves crude oil unloading from a crude supply source to the crude storage
tanks, transfer of crude from these tanks to the charging tanks, and charging the crude
distillation units continuously over a time horizon, with crude mixes from the charging
tanks. We assume that a crude supply plan is in place where we know the crude arrival
times and the corresponding arrival quantities and compositions.
The MINLP corresponding to the scheduling problem is nonconvex due to the
presence of bilinear terms in some of the mass balance constraints, and hence the
standard methods for solving MINLPs (see Grossmann, 2002) may fail to converge to a
solution or lead to sub-optimal solutions. Branch and bound based methods have been
reported in the literature (Sahinidis, 1996; Adjiman et al., 2000) for globally optimizing
nonconvex models. The Outer Approximation algorithms developed by Duran and
Grossmann (1986) and by Fletcher and Leyffer (1994) can yield globally optimal
solutions only if the feasible space and the objective function of the problem are both
convex. For nonconvex MINLPs, a finitely convergent decomposition algorithm based on
Outer Approximation has been proposed, for instance, by Kesavan et al. (2004) to solve
these MINLPs to global optimality. Nonconvexities have also been handled by Bergamini

4
et al. (2005), who have presented a global optimization algorithm for Generalized
Disjunctive Programming (GDP) problems. A further extension of the basic idea of Outer
Approximation for the global optimization of deterministic and stochastic nonconvex
MINLPs can be found in Wei et al. (2005).
In this work, we present an Outer-Approximation algorithm to obtain globally
optimal solutions of the nonconvex MINLPs (with binary integer variables only) arising
in the scheduling of crude oil movement in a petrochemical refinery, where the objective
is to minimize the costs involved in the operation and in maintaining the inventory levels
in the crude tanks. The proposed technique focuses on effectively solving the MILP
relaxation of the nonconvex MINLP to obtain a tight and rigorous lower bound on the
solution of the MINLP. Based on a decomposition of the original MINLP model, we
generate sub-models whose solutions are used to derive valid cutting planes. These cuts
are added to the MILP relaxation of the original problem in order to tighten the relaxation
and reduce the computational expense of solving the relaxations. Numerical examples are
presented to demonstrate that the use of such an algorithm on a class of nonconvex
MINLPs can result in significant computational savings.
This paper is organized as follows. Section 2 presents the problem statement of
the crude scheduling problem while section 3 provides the nonconvex MINLP model. A
discussion of the algorithm is given in section 4. Section 5 presents the different
examples on which the algorithm was applied, and finally, section 6 summarizes some
conclusions and recommendations for future work.
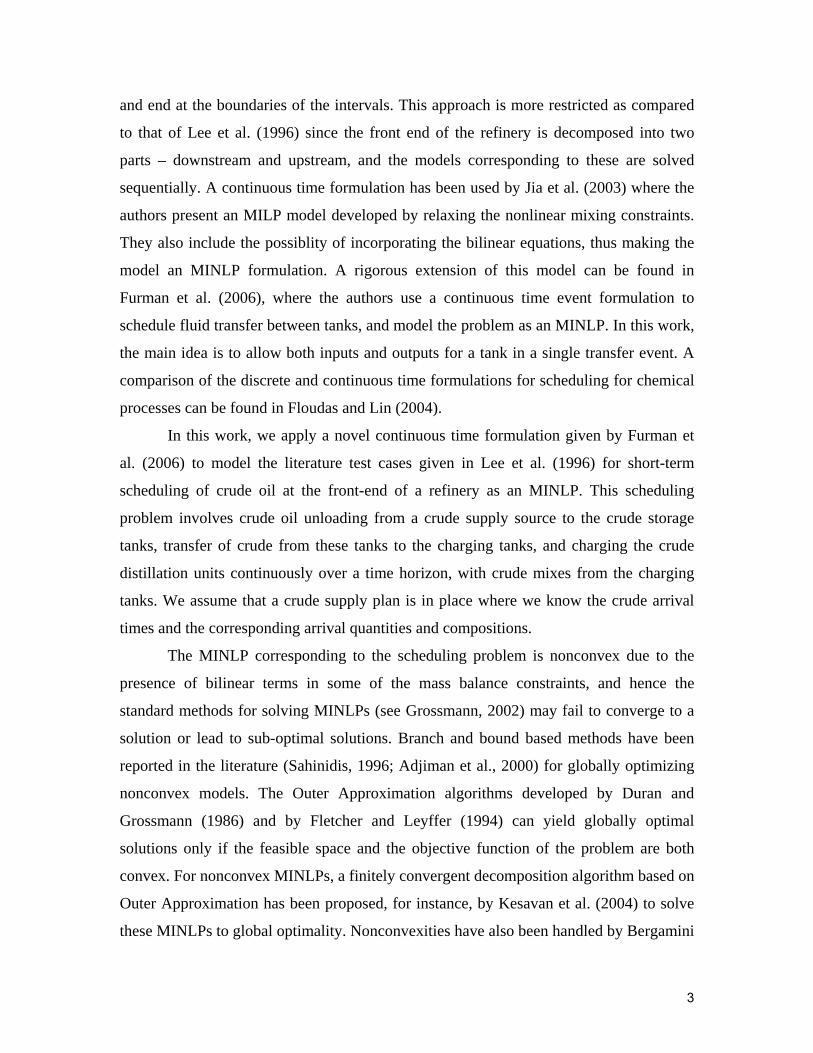
2. Problem Statement
The front-end of a refinery is a network consisting of supply streams, storage
tanks, charging tanks and crude distillation units (CDUs) whose structure is shown in Fig.
1. The supply streams are connected to the storage tanks which are connected to the
charging tanks, which in turn, are connected to the CDUs. The supply streams, which are
crude carrying vessels, deliver crude oil to the storage tanks (intermediate tanks), which
transfer the crude to the charging tanks. Different qualities of crude get blended into

5
various crude mixtures inside the charging tanks, which are then charged directly to the
distillation units.
Fig. 1 Schematic of the front-end of a refinery
For scheduling the flow of crude oil in the above network, the following
information is given:
(a) The maximum and minimum inventory levels for a tank (capacity limitations); (b) the
initial total and component inventories in a tank; (c) upper and lower bounds on the
fraction of key components in the crude inside a tank (crude quality limitations); (d)
times of arrival of crude oil in the supply streams; (e) amount of crude arriving in the
supply streams; (f) fractions of various components in the supply streams; (g) demand of
crude-mix to be charged from a charging tank; (h) bounds on the flowrates of the streams
in the network; (i) time horizon for scheduling; (j) cost coefficients for calculating the
various costs involved.
The problem is then to determine the optimum values of the following items in
the system in order to minimize the total operating cost of the network: (i) the total and
component inventory levels in the tanks at various instances of time; (ii) the total and
component flow volumes from one unit to another in a certain time interval; (iii) start and
end times of the flows in each stream present in the network.
Finally, the following operating constraints must hold in the network:
Crude Supply Streams Storage
TanksCharging Tanks
Crude Distillation Units

6
1. Simultaneous inputs into and outputs from a tank cannot be allowed. This is done
to allow settling of the crude mix in a tank.
2. Each distillation unit may be charged by at most one charging tank over a period
of time. This is another operational norm followed in in many refineries.
3. Each charging tank may charge at most one distillation unit at a point of time.
4. Each charging tank has to discharge a specified amount of crude-mix to the
various distillation units within the given time horizon.
5. All the distillation units have to be operated continuously throughout the entire
time horizon.
3. Model
We model the optimization of the network as a nonconvex MINLP problem.
Certain assumptions are made prior to modeling the system:
1. Perfect mixing takes place in each tank.
2. Negligible change in specific gravities on mixing.
3. The crude flows into and from a tank need not be continuous.
4. Changeover times for CDU charging are neglected.
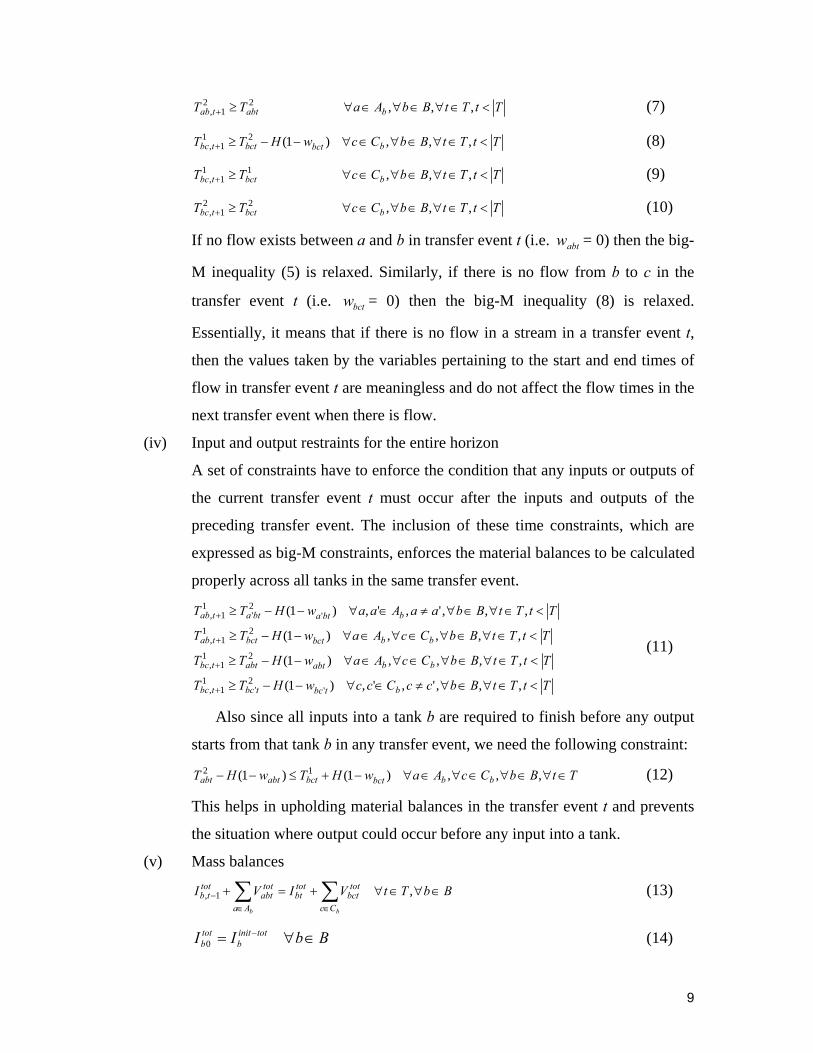
The mathematical model for the scheduling problem has largely been taken from
Furman et al. (2006) and it mainly involves mass balances, sequencing constraints,
allocation constraints, and crude supply and demand constraints. This is a continuous
time model for scheduling for which a number of transfer events are postulated for the
transfer of material between units in the network over a given time horizon, as shown in
Fig. 2. Note that as opposed to most scheduling models (see Mendez et al., 2006), the
times here involve timings of transfer between pairs of units.
Fig. 2 Timing for transfer from unit ‘a’ to unit ‘b’ in event ‘t’ Time
Unit bUnit a
1abtT 2
abtTt= start time of transfer1
abtT
= end time of transfer2abtT

7
When fluid transfers take place between tanks a and b, these are assumed to take
place over the same transfer event t, and for which precedence constraints are imposed
for the start and end times that are unknown. The number of transfer events needed to
characterize the time horizon for each stream is not known as in other continuous time
models, and is chosen arbitrarily before the optimization. A higher number of transfer
events leads to a better representation of the schedule, although it increases the size of the
model. The novelty in the model lies in the fact that inputs and outputs are allowed to
occur in a single transfer event. However, simultaneous input and output is not allowed
for any tank in the same transfer event and therefore all input flows must finish before an
output flow starts for any tank in any transfer event. This kind of formulation reduces the
number of binary variables required in the model. The optimization model consists of
constraints for the crude tanks, for the distillation units, and for the supply streams:
Tank Constraints
(i) Constraints for flow transfers
TtBbAawVV babtUab
totabt ∈∀∈∀∈∀≤ ,, (1)
TtBbCcwVV bbctUbc
totbct ∈∀∈∀∈∀≤ ,, (2)
These constraints force the total flow in a stream ( totabtV ) from a source tank a to
any destination tank b in a particular transfer event t to zero if the binary
variable, wabt, which pertains to the existence of flow in that stream in transfer
event t, takes a value of zero. Note that the first subscript denotes the source
from where the flow is taking place, while the second subscript denotes the
destination to where the flow is going. The third and final subscript denotes
the transfer event when the particular flow occurs. The binary variable wabt
represents the existence of flow between source a and tank b in transfer event
t. The same is true for binary variable wbct which takes on a value of 1 or 0,
respectively, depending on whether or not there is flow between tank b and a
destination unit c in transfer event t. The first subscript in the binary variable
w, stands for the source of the flow, while the second subscript denotes the
destination of the flow. The third and final subscript stands for the transfer
event in which the flow is taking place.

8
(ii) Duration constraints
TtBbCcVwHFTTF
TtBbAaVwHFTTF
btot
bctbctUbcbctbct
Ubc
btot
abtabtUababtabt
Uab
∈∀∈∀∈∀≥−+−
∈∀∈∀∈∀≥−+−
,,)1()(
,,)1()(12
12
(3)
For a flow between source a and tank b, the timing variables 1abtT and 2
abtT
correspond to the start and end times of flow in a stream from a to b in
transfer event t. The timing variables 1bctT and 2
bctT are similarly defined for a
flow between tank b and a destination c in transfer event t. H is the overall
time horizon of operation. These constraints are relaxed and the timing
variables can take on any value if there is no flow in a certain transfer event.
The above is expressed through big-M constraints that state that, if there is a
flow in a stream in the network in transfer event t, the product of the upper
bound on the flowrate of the crude stream with the duration of flow in the
transfer event gives an upper bound on the total flow volume in that transfer
event.
TtSsCcVwHFTTF
TtSsAaVwHFTTF
stot
sctsctL
scsctsctL
sc
stot
astastL
asastastL
as
∈∀∈∀∈∀≤−−−
∈∀∈∀∈∀≤−−−
,,)1()(
,,)1()(12
12
(4a)
TtGgCcVTTF gtotgctgctgct
Lgc ∈∀∈∀∈∀≤− ,,)( 12 (4b)
Similarly, as given in eq (4a) and eq (4b), if there is a flow in transfer
event t into or from a tank, the lower bound on the volume of a flow is
obtained by multiplying the fluid flowrate lower bound with the duration of
flow. We should note that for the charging tanks, the start and end times have
to coincide if there is no flow in a particular time event (eq (11b)). This
enforces the continuity of operation of the CDUs under the condition that only
one charging tank can charge a CDU in a certain transfer event.
(iii) Simple sequencing constraints
A flow into or from a tank b in transfer event t has to take place before the
same flow in event t+1. Equations (5) – (10) correspond to this necessary
condition.
TtTtBbAawHTT babtabttab <∈∀∈∀∈∀−−≥+ ,,,)1(211, (5)
TtTtBbAaTT babttab <∈∀∈∀∈∀≥+ ,,,111, (6)
9
TtTtBbAaTT babttab <∈∀∈∀∈∀≥+ ,,,221, (7)
TtTtBbCcwHTT bbctbcttbc <∈∀∈∀∈∀−−≥+ ,,,)1(211, (8)
TtTtBbCcTT bbcttbc <∈∀∈∀∈∀≥+ ,,,111, (9)
TtTtBbCcTT bbcttbc <∈∀∈∀∈∀≥+ ,,,221, (10)
If no flow exists between a and b in transfer event t (i.e. abtw = 0) then the big-
M inequality (5) is relaxed. Similarly, if there is no flow from b to c in the
transfer event t (i.e. bctw = 0) then the big-M inequality (8) is relaxed.
Essentially, it means that if there is no flow in a stream in a transfer event t,
then the values taken by the variables pertaining to the start and end times of
flow in transfer event t are meaningless and do not affect the flow times in the
next transfer event when there is flow.
(iv) Input and output restraints for the entire horizon
A set of constraints have to enforce the condition that any inputs or outputs of
the current transfer event t must occur after the inputs and outputs of the
preceding transfer event. The inclusion of these time constraints, which are
expressed as big-M constraints, enforces the material balances to be calculated
properly across all tanks in the same transfer event.
TtTtBbccCccwHTT
TtTtBbCcAawHTT
TtTtBbCcAawHTT
TtTtBbaaAaawHTT
btbctbctbc
bbabtabttbc
bbbctbcttab
bbtabtatab
<∈∀∈∀≠∈∀−−≥
<∈∀∈∀∈∀∈∀−−≥
<∈∀∈∀∈∀∈∀−−≥
<∈∀∈∀≠∈∀−−≥
+
+
+
+
,,,',',)1(
,,,,)1(
,,,,)1(
,,,',',)1(
'2
'1
1,
211,
211,
'2'
11,
(11)
Also since all inputs into a tank b are required to finish before any output
starts from that tank b in any transfer event, we need the following constraint:
TtBbCcAawHTwHT bbbctbctabtabt ∈∀∈∀∈∀∈∀−+≤−− ,,,)1()1( 12 (12)
This helps in upholding material balances in the transfer event t and prevents
the situation where output could occur before any input into a tank.
(v) Mass balances
BbTtVIVIbb Cc
totbct
totbt
Aa
totabt
tottb ∈∀∈∀+=+ ∑∑
∈∈− ,1, (13)
BbII totinitb
totb ∈∀= −
0 (14)
10
BbTtJjVIVIbb Cc
jbctjbtAa
jabttjb ∈∀∈∀∈∀+=+ ∑∑∈∈
− ,,1, (15)
BbJjII initjbjb ∈∀∈∀= ,0 (16)
BbTtAaVV bJj
jabttot
abt ∈∀∈∀∈∀=∑∈
,, (17)
BbTtCcVV bJj
jbcttot
bct ∈∀∈∀∈∀=∑∈
,, (18)
For each tank b ∈ B in the network, we have an overall inventory balance (eq
(13)), individual inventory balances (eq (15)) for each component j ∈ J and
the total flow balances (eq (17) and eq (18)). The inventory balances imply
that the inventory in tank b at the end of a transfer event t is equal to the
inventory at the end of transfer event t-1 plus the volume flow into the tank
from any input source a in transfer event t, minus the flow to any output
destination c in the transfer event t. The representation of a crude tank is
shown in Fig. 3.
Fig. 3 Crude tank representation
The variables totbtI and jbtI correspond to the total inventory and individual
component inventory in a tank b at the end of transfer event t, respectively.
The volume flow balances imply that the total flow into or out from a tank
equals the sum of the individual component flows. totabtV stands for the total
volume flow from any source a to tank b in transfer event t, while totbctV
represents the flow from tank b to a destination c to which this tank is
connected. jabtV and jbctV are the respective component flows.
(vi) Component balances
On assuming perfect mixing in a tank, the fraction of a component j in the
output flow from a tank should be equal to the fraction of that component
b ∈ Ba ∈ Ab
c ∈ Cb
Source DestinationCrude tanktot
abtV totbctV

11
present inside the tank. This constraint is formulated as follows, with bilinear
terms, which give rise to the nonconvexity of the model:
BbCcTtJjVVIVVI btot
bctAa
jabttjbjbctAa
totabt
tottb
bb
∈∀∈∀∈∀∈∀⎟⎟
⎠
⎞
⎜⎜
⎝
⎛+=⎟
⎟
⎠
⎞
⎜⎜
⎝
⎛+ ∑∑
∈−
∈− ,,,1,1, (19)
(vii) Inventory bounds
The following constraint must hold in order to ensure that the total inventory
in any transfer event does not exceed the upper bound of the inventory since
both inputs and outputs can occur in the same transfer event.
TtBbIVI Ub
Aa
totabt
tottb
b
∈∀∈∀≤+ ∑∈
− ,1, (20)
The sum ( ∑∈
− +bAa
totabt
tottb VI 1, ) is the total inventory in a tank b in transfer event t
before any output flow starts to occur from the tank in the same transfer event.
(viii) Bounds on components fractions inside a tank
The fraction of a component in the crude inside any tank should lie between
given bounds. This is enforced by the following constraints:
TtBbJjIfIIf totbt
Ujbjbt
totbt
Ljb ∈∀∈∀∈∀≤≤ ,, (21)
TtCcBbJjVfVVf btot
bctUjbjbct
totbct
Ljb ∈∀∈∀∈∀∈∀≤≤ ,,, (22)
Ljbf and U
jbf stand for the lower and upper bounds, respectively, of the fraction
of a component j inside a tank b.
(ix) Crude-mix demand constraints
Each charging tank g ∈ G must charge a specified amount of crude-mix
over the entire scheduling horizon. This volume of crude-mix is distributed to
the different CDUs in the network.
GgDMV gDd t
totgdt
g
∈∀=∑ ∑∈
(23)
(x) Bound strengthening cuts (optional)
The following constraints may be added to the model in an attempt to
tighten the relaxation of the MINLP model so as to accelerate the convergence
to find the optimal solution. These are derived using a reformulation and

12
linearization technique given in Sherali and Alameddine (1992). In this we
take eq (19) and expand it to get the following equation:
BbCcTtJjVVVIVVVI bAa
totbctjabt
totbcttjb
Aajbct
totabtjbct
tottb
bb
∈∀∈∀∈∀∈∀+=+ ∑∑∈
−∈
− ,,,1,1,
(24)
Each bilinear term present in the above equation is considered and a
summation is carried out over j ∈ J for each of these bilinear terms, which
results in the following set of equations,
BbCcTtAaVVVV
BbCcTtVIVI
BbCcTtAaVVVV
BbCcTtVIVI
bbtot
bcttot
abttot
bctJj
jabt
btot
bcttot
tbtot
bctJj
tottjb
bbtot
bcttot
abtjbctJj
totabt
btot
bcttot
tbjbctJj
tottb
∈∀∈∀∈∀∈∀=
∈∀∈∀∈∀=
∈∀∈∀∈∀∈∀=
∈∀∈∀∈∀=
∑
∑
∑
∑
∈
−∈
−
∈
−∈
−
,,,
,,
,,,
,,
1,1,
1,1,
(24a)
Distillation Units
Each distillation unit d ∈ D is modeled with the following set of constraints:
(i) Allocation constraints
The conditions that each distillation unit can be charged by at most one
charging tank in a transfer event and at most one CDU can be charged
by a single charging tank in a transfer event are enforced by eq (25)
and eq (26) respectively.
TtDdwdGg
gdt ∈∀∈∀≤∑∈
,1 (25)
TtGgwgDd
gdt ∈∀∈∀≤∑∈
,1 (26)
(ii) Continuous operation constraint
Each crude distillation unit (CDU) must be operated continuously and
the total time of operation of each CDU must be equal to the time
horizon H (eq (27)). Because of the continuity required in the duration
of operation, and the requirement that only one charging tank can

13
charge a CDU over a period of time, for a CDU which is charged in
transfer event t, the next charge (in transfer event t+1) will start at the
ending time of the current transfer event t. This is enforced by eq (28)
and eq (29).
DdHTTt Gg
gdtgdtd
∈∀=−∑ ∑∈
][ 12 (27)
TtTtDdggGggwHTT ddtgdtgtgd <∈∀∈∀≠∈∀−−≥+ ,,,',',)1( '2'
11, (28)
TtTtDdggGggwHTT ddtgdtgtgd <∈∀∈∀≠∈∀−+≤+ ,,,',',)1( '2'
11, (29)
Supply Streams
The supply streams have to follow certain mass balance and timing constraints:
(i) Timing Constraints
TtSsPpwHTT
TtSsPpwHTT
ppstpstendp
ppstpststart
p
∈∀∈∀∈∀−−≥
∈∀∈∀∈∀−+≤
,,)1(
,,)1(2
1
(30)
These constraints state that all the flows from a supply stream p to
storage tank s in any transfer event must start after a particular time
( startpT ) and end before a certain time ( end
pT ). It is to be noted that
the flow from a supply stream can be split such that one or more
storage tanks are simultaneously fed by a single supply stream.
Also, two or more suppply streams can feed the same storage tank
at the same time.
(ii) Overall mass balances
The total amount of crude oil arriving in a supply stream p (given
by supplypV ), must be completely transferred to the storage tanks
over the set of all transfer events in the horizon.
PpVV pTt Ss
totpst
p
∈∀=∑∑∈ ∈
supply (31)
(iii) Component balances

14
The component flow from a supply stream p to a tank s (storage
tank) in a transfer event t is equal to the product of the total flow
from that supply stream to the tank and the fraction of the
component in the supply stream which is known.
TtPpSsJjVfV ptotpstjpjpst ∈∀∈∀∈∀∈∀= ,,,supply (32)
supplyjpf is the fraction of component j in the supply stream p.
Variable bounds
All the continuous variables must lie between specified bounds and the
discrete variables can be either 0 or 1.
}1,0{,
,,0
,,0
,,0
,,0
,,0
,,0
,,,0
,,,0
,
,,0
2
1
2
1
∈
∈∀≤≤
∈∀≤≤
∈∀∈∀∈∀≤≤
∈∀∈∀∈∀≤≤
∈∀∈∀∈∀≤≤
∈∀∈∀∈∀≤≤
∈∀∈∀∈∀≤≤
∈∀∈∀∈∀≤≤
∈∀∈∀∈∀∈∀≤≤
∈∀∈∀∈∀∈∀≤≤
∈∀∈∀≤≤
∈∀∈∀∈∀≤≤
bctabt
endp
arrp
startp
arrp
bbct
bbct
babt
babt
bUbc
totbct
bUab
totabt
bUbcjbct
bUabjabt
Ub
totbt
Lb
Ubjbt
ww
PpHTT
PpHTT
TtBbCcHT
TtBbCcHT
TtBbAaHT
TtBbAaHT
TtBbCcVV
TtBbAaVV
TtBbCcJjVV
TtBbAaJjVV
TtBbIII
TtBbJjII
(33)
Objective function
The objective function used in this work is similar to the one used in Lee et al.
(1996).

15
)(
)12/(2)()(
)()( zmin
NDwCset
NEIIVIbCinvH
TTCunloadTTCsea
Dd Gg tgdt
Bb
totinitb
t Tt
totbt
Aa
totabt
totbt
Pp
startp
endp
Pp
arrivalp
startp
d
b
−+
+×⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛+++×+
+−+−=
∑ ∑ ∑
∑ ∑ ∑∑
∑∑
∈ ∈
∈
−
<∈
∈∈
(34)
where ∑ −p
arrivalp
startp TTCsea )( is a waiting cost for a supply stream while the term
∑ −p
startp
endp TTCunload )( represents the unloading cost of crude for a supply stream. The
total inventory maintenance cost of all the tanks in the system is given by the
approximation )12/(2)()( +×⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛+++×∑ ∑ ∑∑
∈
−
<∈
NEIIVIbCinvHBb
totinitb
t Tt
totbt
Aa
totabt
totbt
b
. This term is
written in this way, since the model allows for both input into and output from a tank in
the same transfer event, although they cannot be simultaneous. The last term
)( NDwCsetDd Gg t
gdtd
−∑ ∑∑∈ ∈
corresponds to the setup cost of charging the ‘ND’ CDUs with
different crude-mixes.
Equations (1) – (23), (25) – (34) comprise the MINLP model (P) which is to be
optimized.
4. Solution Strategy
Large scale MINLPs such as problem (P) require specialized solution algorithms.
We propose a specialized Outer-Approximation algorithm for solving the nonconvex
model (P) to global optimality within a specified tolerance. In the proposed technique, we
generate lower and upper bounds on the global optimum of (P) over a search region by
solving separate models, which are then converged in the proposed algorithm.
4.1 Lower Bounding problem
A rigorous lower bound on the global optimum of problem (P) can be obtained by
solving an MILP relaxation of the original nonconvex MINLP model (P). This relaxation
can be constructed by replacing the nonlinear equation (19) with eq (35) and using

16
convex envelopes (see McCormick, 1976) (eqs (36) – (39)) for the bilinear terms
appearing in eq (19), as given by the constraints below,
BbCcTtJjVIVI bAa
VTjabct
VTjbct
Aa
VJjabct
VJjbct
bb
∈∀∈∀∈∀∈∀+=+ ∑∑∈∈
,,, (35)
BbTtCcjVIIVVII
BbTtCcjVIIVVII
BbTtCcjVIIVVII
BbTtCcjVIIVVII
bL
bcUb
tottb
Lbcjbct
Ub
VJjbct
bUbc
Lb
tottb
Ubcjbct
Lb
VJjbct
bUbc
Ub
tottb
Ubcjbct
Ub
VJjbct
bL
bcLb
tottb
Lbcjbct
Lb
VJjbct
∈∀∈∀∈∀∀−+≤
∈∀∈∀∈∀∀−+≤
∈∀∈∀∈∀∀−+≥
∈∀∈∀∈∀∀−+≥
−
−
−
−
,,,
,,,
,,,
,,,
1,
1,
1,
1,
(36)
BbTtCcjVIIVVII
BbTtCcjVIIVVII
BbTtCcjVIIVVII
BbTtCcjVIIVVII
bL
bcUbtjb
Lbc
totbct
Ub
VTjbct
bUbc
Lbtjb
Ubc
totbct
Lb
VTjbct
bUbc
Ubtjb
Ubc
totbct
Ub
VTjbct
bL
bcLbtjb
Lbc
totbct
Lb
VTjbct
∈∀∈∀∈∀∀−+≤
∈∀∈∀∈∀∀−+≤
∈∀∈∀∈∀∀−+≥
∈∀∈∀∈∀∀−+≥
−
−
−
−
,,,
,,,
,,,
,,,
1,
1,
1,
1,
(37)
BbTtCcAajVVVVVVV
BbTtCcAajVVVVVVV
BbTtCcAajVVVVVVV
BbTtCcAajVVVVVVV
bbL
bcUab
totabt
Lbcjbct
Uab
VJjabct
bbUbc
Lab
totabt
Ubcjbct
Lab
VJjabct
bbUbc
Uab
totabt
Ubcjbct
Uab
VJjabct
bbL
bcL
abtot
abtL
bcjbctL
abVJjabct
∈∀∈∀∈∀∈∀∀−+≤
∈∀∈∀∈∀∈∀∀−+≤
∈∀∈∀∈∀∈∀∀−+≥
∈∀∈∀∈∀∈∀∀−+≥
,,,,
,,,,
,,,,
,,,,
(38)
BbTtCcAajVVVVVVV
BbTtCcAajVVVVVVV
BbTtCcAajVVVVVVV
BbTtCcAajVVVVVVV
bbL
bcUabjabt
Lbc
totbct
Uab
VTjabct
bbUbc
Labjabt
Ubc
totbct
Lab
VTjabct
bbUbc
Uabjabt
Ubc
totbct
Uab
VTjabct
bbL
bcL
abjabtL
bctot
bctL
abVTjabct
∈∀∈∀∈∀∈∀∀−+≤
∈∀∈∀∈∀∈∀∀−+≤
∈∀∈∀∈∀∈∀∀−+≥
∈∀∈∀∈∀∈∀∀−+≥
,,,,
,,,,
,,,,
,,,,
(39)
The relaxed MILP problem (R) consists of eqs (1) – (18), (20) – (23), (25) – (39).
The MILP relaxation (R) is often very large in size and requires significant computational
effort to solve. To reduce the computational effort in solving this problem, we add cutting
planes to model (R) which are derived using a technique, similar to that given in
Karuppiah and Grossmann (2006). The description of the derivation of these cutting
planes follows. The network is split into separate decoupled structures, as shown in Fig.
3, following the concept of spatial decomposition (e.g. see Jackson and Grossmann,
2003). Here the network is split into two decoupled sub-structures, although more sub-
17
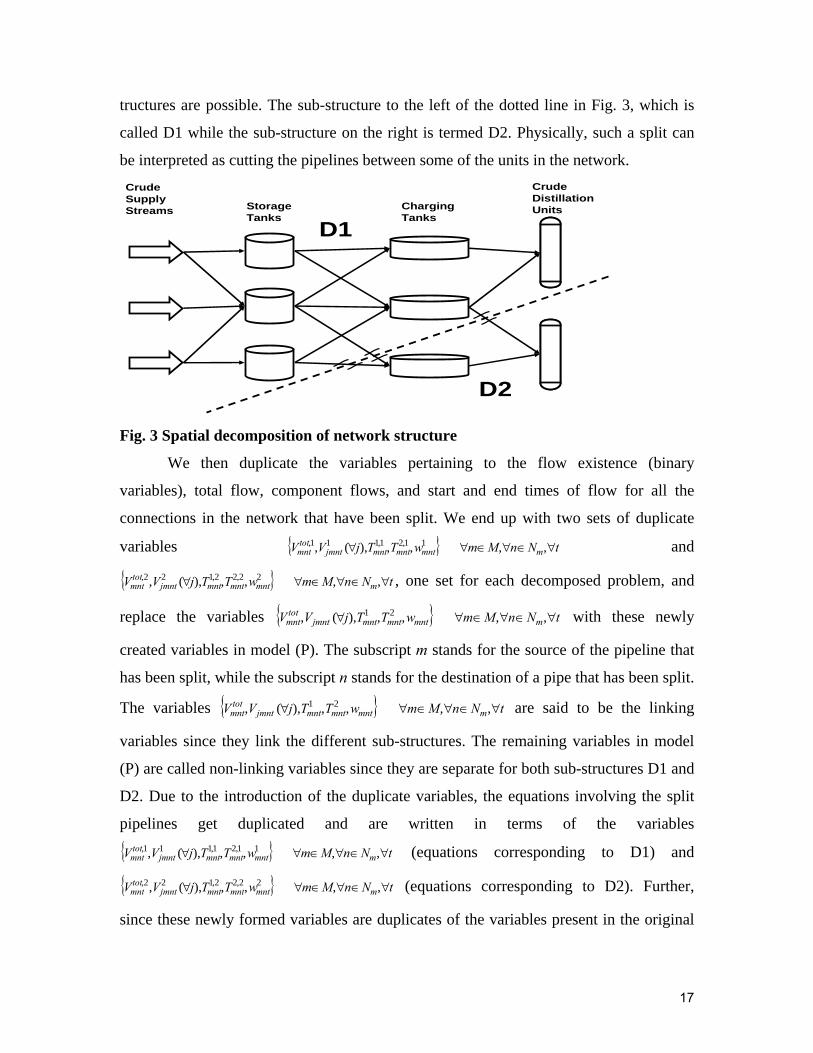
tructures are possible. The sub-structure to the left of the dotted line in Fig. 3, which is
called D1 while the sub-structure on the right is termed D2. Physically, such a split can
be interpreted as cutting the pipelines between some of the units in the network.
Fig. 3 Spatial decomposition of network structure
We then duplicate the variables pertaining to the flow existence (binary
variables), total flow, component flows, and start and end times of flow for all the
connections in the network that have been split. We end up with two sets of duplicate
variables { } tNnMmwTTjVV mmntmntmntjmnttotmnt ∀∈∀∈∀∀ ,,,,),(, 11,21,111, and
{ } tNnMmwTTjVV mmntmntmntjmnttotmnt ∀∈∀∈∀∀ ,,,,),(, 22,22,122, , one set for each decomposed problem, and
replace the variables { } tNnMmwTTjVV mmntmntmntjmnttotmnt ∀∈∀∈∀∀ ,,,,),(, 21 with these newly
created variables in model (P). The subscript m stands for the source of the pipeline that
has been split, while the subscript n stands for the destination of a pipe that has been split.
The variables { } tNnMmwTTjVV mmntmntmntjmnttotmnt ∀∈∀∈∀∀ ,,,,),(, 21 are said to be the linking
variables since they link the different sub-structures. The remaining variables in model
(P) are called non-linking variables since they are separate for both sub-structures D1 and
D2. Due to the introduction of the duplicate variables, the equations involving the split
pipelines get duplicated and are written in terms of the variables
{ } tNnMmwTTjVV mmntmntmntjmnttotmnt ∀∈∀∈∀∀ ,,,,),(, 11,21,111, (equations corresponding to D1) and
{ } tNnMmwTTjVV mmntmntmntjmnttotmnt ∀∈∀∈∀∀ ,,,,),(, 22,22,122, (equations corresponding to D2). Further,
since these newly formed variables are duplicates of the variables present in the original
D1
D2
Crude Supply Streams Storage
TanksCharging Tanks
Crude Distillation Units

18
model, they are related by the following equality constraints which are added to model
(P):
TtNnMmVV mtot
mnttot
mnt ∈∀∈∀∈∀=− ,,02,1, (40)
TtNnMmJjVV mjmntjmnt ∈∀∈∀∈∀∈∀=− ,,,021 (41)
TtNnMmTT mmntmnt ∈∀∈∀∈∀=− ,,02,11,1 (42)
TtNnMmTT mmntmnt ∈∀∈∀∈∀=− ,,02,21,2 (43)
TtNnMmww mmntmnt ∈∀∈∀∈∀=− ,,021 (44)
Equations (40) – (44) are then dualized, that is, they are multiplied by the Lagrange
multipliers 21 ,),(, Tmnt
Tmnt
VCjmnt
Vtotmnt j λλλλ ∀ and w
mntλ tNnMm m ∀∈∀∈∀ ,, , respectively, and
transferred to the objective function. This yields a Lagrangean relaxation of the original
problem, which is denoted by (LRP), and is decomposable into smaller sub-problems
corresponding to D1 and D2, which are easier to solve.
The model (LRP) is decomposed into two smaller sub-problems (LD1) and (LD2)
such that model (LD1) includes equations and variables pertaining to structure D1, while
model (LD2) includes equations and variables corresponding to the structure D2. The
bounds of all the non-linking variables in both the sub-problems are the same as in the
original full space problem (P). For the case of the duplicate variables, their bounds are
the same as the bounds of the corresponding linking variables in the original problem.
The two models (LD1) and (LD2) are as follows:
D1in sconnectionand units toingcorrespond sconstraints.t.
)(
)12/(2)()()(min
11,221,1111,
1
1
1
111
∑ ∑∑∑ ∑ ∑∑ ∑∑∑∑ ∑∑∑ ∑∑
∑ ∑∑
∑ ∑ ∑∑∑∑
∈ ∈∈ ∈∈ ∈∈ ∈∈ ∈
∈ ∈
∈
−
<∈∈∈
++++
+−+
+×⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛+++×+−+−=
Mm Nn tmnt
wmnt
Mm Nn tmnt
Tmnt
Mm Nn tmnt
Tmnt
j Mm Nn tjmnt
VCjmnt
Mm Nn t
totmnt
Vtotmnt
DDd Gg t
gdt
Bb
totinitb
t Tt
totbt
Aa
totabt
totbtb
Pp
startp
endp
Pp
arrivalp
startp
LD
mmmmm
D d
D bDD
wTTVV
NDwCset
NEIIVICinvHTTCunloadTTCseaz
λλλλλ
(LD1)

19
D2in sconnection and units toingcorrespond sconstraints.t.
)(
)12/(2)()()(min
22,222,1122,
2
2
2
222
∑ ∑∑∑ ∑∑∑ ∑∑∑∑ ∑∑∑ ∑∑
∑ ∑∑
∑ ∑ ∑∑∑∑
∈ ∈∈ ∈∈ ∈∈ ∈∈ ∈
∈ ∈
∈
−
<∈∈∈
−−−−−
+−+
+×⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛+++×+−+−=
Mm Nn tmnt
wmnt
Mm Nn tmnt
Tmnt
Mm Nn tmnt
Tmnt
j Mm Nn tjmnt
VCjmnt
Mm Nn t
totmnt
Vtotmnt
DDd Gg t
gdt
Bb
totinitb
t Tt
totbt
Aa
totabt
totbtb
Pp
startp
endp
Pp
arrivalp
startp
LD
mmmmm
D d
D bDD
wTTVV
NDwCset
NEIIVICinvHTTCunloadTTCseaz
λλλλλ
(LD2)
The MILP relaxations of models (LD1) and (LD2), termed (LD1-R) and (LD2-R),
respectively, are constructed by replacing the nonlinear terms in these models by convex
envelopes. Models (LD1-R) and (LD2-R) are solved to obtain solutions *1z and *
2z ,
respectively. Using these solutions, the following valid linear cuts are generated in the
full space of the original problem, which are given by eqs (45) and (46).
∑∑∑∑∑∑∑∑∑∑∑∑∑∑∑∑
∑∑∑
∑ ∑ ∑∑∑∑
∈ ∈∈ ∈∈ ∈∈ ∈∈ ∈
∈ ∈
∈
−
<∈∈∈
++++
+−+
+×⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛+++×+−+−≤
Mm Nn tmnt
wmnt
Mm Nn tmnt
Tmnt
Mm Nn tmnt
Tmnt
j Mm Nn tjmnt
VCjmnt
Mm Nn t
totmnt
Vtotmnt
DDd Gg t
gdt
Bb
totinitb
t Tt
totbt
Aa
totabt
totbtb
Pp
startp
endp
Pp
arrivalp
startp
mmmmm
D d
D bDD
wTTVV
NDwCset
NEIIVICinvHTTCunloadTTCseaz
λλλλλ 2211
1
*1
)(
)12/(2)()()(
1
111
(45)
∑∑∑∑∑∑∑∑∑∑∑∑∑∑∑∑
∑∑∑
∑ ∑ ∑∑∑∑
∈ ∈∈ ∈∈ ∈∈ ∈∈ ∈
∈ ∈
∈
−
<∈∈∈
−−−−−
+−+
+×⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛+++×+−+−≤
Mm Nn tmnt
wmnt
Mm Nn tmnt
Tmnt
Mm Nn tmnt
Tmnt
j Mm Nn tjmnt
VCjmnt
Mm Nn t
totmnt
Vtotmnt
DDd Gg t
gdt
Bb
totinitb
t Tt
totbt
Aa
totabt
totbtb
Pp
startp
endp
Pp
arrivalp
startp
mmmmm
D d
D bDD
wTTVV
NDwCset
NEIIVICinvHTTCunloadTTCseaz
λλλλλ 2211
2
*2
)(
)12/(2)()()(
2
222
(46)
Theoretical properties of such cuts are given in Karuppiah and Grossmann (2006).
Namely, the cuts are valid when added to the original problem, and the inclusion of the
cuts into the relaxation (R) produces a lower bound at least as strong as the lower bound
obtained from Lagrangean decompsotion and the one obtained by solving (R) without
any cuts. The Lagrange multipliers used in these cuts can be updated using a procedure
given in the appendix, and additional cuts can be derived as described above. This
procedure of updating the multiplers and adding cuts can be performed any number of

20
times. It is important to note that the performance of these cuts in reducing the solution
time of the relaxation strongly depends on the values of the Lagrange multipliers. The
cuts (eqs (45) and/or (46)) are then added to (R) which is the MILP relaxation of model
(P) to get a modified MILP model (RP). On solving (RP), we obtain a valid lower bound
on the solution of (P).
4.2 Upper Bounding Sub-problem
We fix the binary variables in problem (P) to the values obtained from the
solution of (RP), and obtain a nonconvex NLP model (P-NLP) which is solved to global
optimality with any standard method. This then yields an upper bound on the solution of
(P). The optimal values of the variables obtained from the solution of (RP) are then used
as a starting point for the NLP solver. In case the model (P-NLP) is found to be infeasible
for these integer values, we use as a heuristic to obtain alternate sub-optimal integer
solutions by solving (RP) for an specified amount of time, and select the best found
integer solution.
4.3 Outer Approximation Algorithm
The proposed Outer Approximation algorithm is shown in flowchart form in Fig. 4.
Fig. 4 Proposed Outer Approximation algorithm
Preprocessing
Bound Contraction optional
Solve Lower BoundingProblem
Solve Upper BoundingProblem
UB – LB ≤ tolerance ?STOP
Solution = UB
Add Integer Cuts
No Yes

21
The algorithm is along the lines of the techniques proposed by Duran and Grossmann
(1986), Kesavan et al. (2004), and Wei et al. (2005) and is outlined as follows:
a. Preprocessing The bounds of the variables in the model are determined by physical
inspection of the network structure and using the numerical data given for the tanks,
supply streams and the distillation units. Also, in this step, the original nonconvex
MINLP may be locally optimized to obtain an initial overall upper bound (OUB) for the
objective function.
b. Bound Contraction (Optional) The bounds of variables appearing in the nonconvex
terms maybe contracted by solving a set of LPs using a procedure given in Zamora and
Grossmann (1999), or the range reduction techniques in Tawarmalani and Sahinidis
(2002).
c. Lower Bound Generation Generate a valid lower bound for the solution of the
nonconvex MINLP following the technique outlined in section 4.1.
d. Upper Bound Generation Generate an upper bound using the method given in section
4.2 and update the OUB if the current upper bound is found to be better than the existing
OUB.
e. Integer Cuts Using the integer solution obtained from solving (RP), add an integer cut
to model (RP) to exclude this particular combination of binary variables. It is important
to note that if the model (P-NLP) is not globally optimized in step d, adding these integer
cuts to the relaxation in the next iteration could potentially cut off the global optimum.
f. Termination Iterate between solving models (RP) and (P-NLP) till the lower bound
exceeds the upper bound or the relaxation gap between the lower and upper bounds is
less than a specified tolerance. Convergence to the global optimum is not guaranteed if a
local NLP solver is used in step d above.
Remarks
(i) In a more traditional Lagrangean decomposition approach, the network is
usually decomposed such that all the units present in it are separated. On
solving the sub-models corresponding to every unit in the network, we obtain
very weak cuts. To avoid this problem, we decompose the network into only

22
two or three sub-structures. It is found heuristically that decomposing the
network into unbalanced sub-structures and using cuts derived from the
smaller sub-structures leads to a better performance of the algorithm.
(ii) There are multiple ways to split the network and generate sub-structures and
corresponding cutting planes. For example, the structure shown in Fig. 1 can
also be split into two sub-structures D3 and D4 as shown below in Fig. 5. Also
the original network structure can be split into more than two sub-structures.
Fig. 5 Alternate decomposition scheme for network in Fig. 1
(iii) A proposed heuristic rule on how to split the original structure is as follows:
(a) Count the number of binary variables (nb) and constraints (nc) in the
original MINLP model (P) pertaining to the optimization of the whole
network structure.
(b) Pick the largest sub-structure resulting from the proposed split scheme
and count the number of binary variables (nbs) and constraints (ncs) in the
MINLP model corresponding to this sub-structure .
(c) Calculate the ratio : (nbs + ncs)/(nb + nc) and check if it is less than 0.9. If
this condition fails, the original structure has to be split differently into
D3
D4Crude Distillation Units
Crude Supply Streams
StorageTanks
Charging Tanks

23
sub-structures such that (nbs + ncs)/(nb + nc) for the largest sub-structure
is below 0.9.
5. Examples
The effectiveness of the proposed algorithm in solving scheduling problems is
demonstrated using three examples for which the data is obtained from Lee et al. (1996).
The units of some of the parameters are not specified in order to be consistent with the
previous literature data. All examples were formulated using GAMS (Brooke et al., 1998)
and solved on Intel 3.2 GHz Linux machine with 1024 MB memory. GAMS/CPLEX 9.0
was used for solving the MILP problems, while GAMS/CONOPT 3.0 and
GAMS/BARON 7.2.5 were used for local optimization and global optimization,
respectively, of the NLP problems. For comparison with the proposed algorithm, we also
used GAMS/DICOPT and GAMS/BARON 7.2.5 for solving the MINLP models. Locally
optimal solutions to the MINLP models are obtained using DICOPT (1 iteration for the
relaxed NLP + 2 major iterations are performed) and compared against the solutions
obtained from the proposed algorithm. Hence, the computational expense of solving the
examples using DICOPT is not included in the total computational time taken by the
algorithm. It is to be noted that when BARON (Sahinidis, 1996) was used to solve the
NLP model (P-NLP), an optimality tolerance of 1% was used. The algorithm was
terminated at the end of the first iteration for all the examples, since the relaxation gap
between the lower and upper bound was sufficiently small within an acceptable tolerance
for the global optimum. However, the iterations of the proposed Outer-Approximation
algorithm may be continued to further reduce the gap between the lower and upper
bounds. The problem sizes for all three examples is given in Table 4 and the various
computational results are given in Tables 5a – 5d. The number of transfer events was
arbitrarily chosen to be 3 for all the units in all the examples, as the algorithm was able to
find good solutions when the horizon was divided into 3 transfer events.
Example 1 The first example is a network consisting of 3 supply streams, 3 storage tanks,
3 charging tanks and 2 distillation units, whose structure is shown in Fig. 1. The crude oil

24
in this example contains one key component and all the other components are combined
into a bulk component, thus effectively making the given crude a two component system.
The crude movement has to be scheduled over a time horizon of 12 hours. The relevant
numerical data to carry out the optimization for this example is given in Table 1.
Table 1. Data for example 1
Scheduling Horizon (H) 12 hours
Number of crude supply
streams 3
Crude Supply
Stream
Arrival time
( arrpT )
Incoming
volume of crude
Fraction of key
component
IN1 1 50 0.01
IN2 5 50 0.085
IN3 9 50 0.06
Number of Storage Tanks 3
Storage
Tank Capacity Initial Oil Inventory
Initial fraction of
key component (min – max)
ST1 100 20 0.02 (0.01 – 0.03)
ST2 100 20 0.05 (0.04 – 0.06)
ST3 100 20 0.08 (0.07 – 0.09)
Number of Charging Tanks 3
Charging
Tank Capacity Initial Oil Inventory
Initial fraction of
key component (min – max)
CT1 100 30 0.03 (0.025 – 0.035)
CT2 100 50 0.05 (0.045 – 0.065)
CT3 100 30 0.08 (0.075 – 0.085)
25
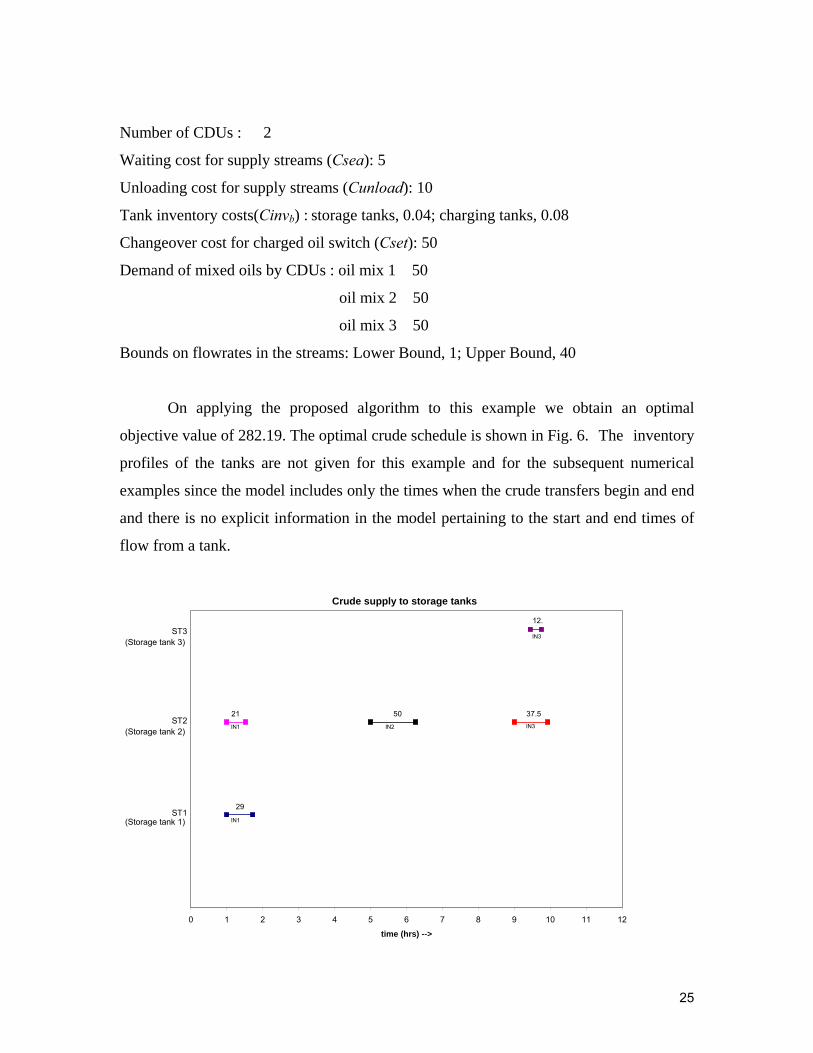
Number of CDUs : 2
Waiting cost for supply streams (Csea): 5
Unloading cost for supply streams (Cunload): 10
Tank inventory costs(Cinvb) : storage tanks, 0.04; charging tanks, 0.08
Changeover cost for charged oil switch (Cset): 50
Demand of mixed oils by CDUs : oil mix 1 50
oil mix 2 50
oil mix 3 50
Bounds on flowrates in the streams: Lower Bound, 1; Upper Bound, 40
On applying the proposed algorithm to this example we obtain an optimal
objective value of 282.19. The optimal crude schedule is shown in Fig. 6. The inventory
profiles of the tanks are not given for this example and for the subsequent numerical
examples since the model includes only the times when the crude transfers begin and end
and there is no explicit information in the model pertaining to the start and end times of
flow from a tank.
Crude supply to storage tanks
0 1 2 3 4 5 6 7 8 9 10 11 12
time (hrs) -->
ST2
ST1
ST3
IN1
IN3
IN3IN2
IN1
12.
37.55021
29
(Storage tank 3)
(Storage tank 2)
(Storage tank 1)

26
Crude transfers between storage and charging tanks
0 1 2 3 4 5 6 7 8 9 10 11 12
time (hrs) -->
CT2
CT1
CT3 12.57.
9.11
10.89
16
ST2
ST3
ST2
ST1
ST2(Charging tank 3)
(Charging tank 1)
(Charging tank 2)
Charging schedule for distillation units
0 1 2 3 4 5 6 7 8 9 10 11 12
time (hrs) -->
CT1
DU2
DU1CT1CT2
CT2 CT3
49.73 50
30 0.27 20
Distillation unit 2
Distillation unit 1
Fig. 6 Gantt chart of the schedule for example 1

27
Example 2 The second example is very similar in structure to the first example and it also
has 3 supply streams, 3 storage tanks, 3 charging tanks and 2 distillation units. The
network structure is shown in Fig. 7. Here we have two key components in the crude oil
instead of only one as in example 1. The crude in this example is hence a three
component fluid with these key components along with the remaining bulk component.
This makes the model size larger for this example.
Fig. 7 Network structure for example 2
The scheduling has to be done for a time horizon of 10 hours. Table 2 provides
the necessary data for the optimization and the optimal solution is given in Fig. 8.
Table 2. Data for example 2
Scheduling Horizon (H) 10 hours
Number of crude supply
streams 3
Crude Supply
Stream
Arrival time
( arrpT )
Incoming volume
of crude
Fraction of
key
component 1
Fraction of
key
component 2
IN1 1 100 0.01 0.04
IN2 4 100 0.03 0.02
IN3 7 100 0.05 0.01
Crude Supply Streams
StorageTanks
Charging Tanks
Crude Distillation Units

28
Number of Storage Tanks 3
Storage
Tank Capacity
Initial Oil
Inventory
Initial fraction of key
component 1
Initial fraction of key
component 2
ST1 100 20 0.01 0.04
ST2 100 50 0.03 0.02
ST3 100 70 0.05 0.01
Number of Charging Tanks 3
Charging
Tank Capacity
Initial Oil
Inventory
Initial fraction of key
component 1
(min – max)
Initial fraction of key
component 2
(min – max)
CT1 100 30 0.0167 (0.01 – 0.02) 0.0333 (0.03 – 0.038)
CT2 100 50 0.03 (0.025 – 0.035) 0.023 (0.018 – 0.027)
CT3 100 30 0.0433 (0.04 – 0.048) 0.0133 (0.01 – 0.018)
Number of CDUs : 3
Waiting cost for supply streams (Csea): 5
Unloading cost for supply streams (Cunload): 8
Tank inventory costs (Cinvb): storage tanks, 0.05; charging tanks, 0.08
Changeover cost for charged oil switch (Cset): 30
Demand of mixed oils by CDUs : oil mix 1 100
oil mix 2 100
oil mix 3 100
Bounds on flowrates in the streams: Lower Bound, 1; Upper Bound, 40

29
Crude supply to storage tanks
0 1 2 3 4 5 6 7 8 9 10
time (hrs) -->
ST2
ST1
ST3IN3
IN2
IN1
100
100
100
(Storage tank 3)
(Storage tank 2)
(Storage tank 1)
Crude transfers between storage and charging tanks
0 1 2 3 4 5 6 7 8 9 10
time (hrs) -->
CT2
CT1
CT3
10.76
35.1
4.09 65.91
20
ST2
ST3
ST1
ST1
ST2
35.1
34.8ST3
ST2(Charging tank 3)
(Charging tank 2)
(Charging tank 1)

30
Charging schedule for distillation units
Distillationunit 1
Distillationunit 2
0 1 2 3 4 5 6 7 8 9 10
time (hrs) -->
CT1
DU2
DU1CT1CT2
CT2 CT3
50 100
17.61 50 82.39
Fig. 8 Optimal solution for example 2
Example 3 The final example is an industrial size problem with 3 supply streams, 6
storage tanks, 4 charging tanks and 3 distillation units. The crude oil has to be scheduled
over a time horizon of 15 hours. The crude oil in this system involves a single key
component as in example 1 and other components combined into a bulk component. The
network structure is shown in Fig. 9.

31
Fig. 9 Network structure for example 3
The relevant numerical data for this example is given in Table 3 while the optimal
schedule is shown in Fig. 10.
Table 3. Data for example 3
Scheduling Horizon (H) 15 hours
Number of crude supply
streams 3
Crude Supply
Stream
Arrival Time
( arrpT )
Incoming
Volume of
crude
Fraction of key
component
IN1 1 60 0.03
IN2 6 60 0.05
IN3 11 60 0.065
Number of Storage Tanks 6
Storage
Tank Capacity Initial Inventory
Initial fraction of
key component (min – max)
ST1 10 – 90 60 0.031 (0.025 – 0.038)
ST2 10 – 110 10 0.03 (0.02 – 0.04)
Crude Supply Streams
StorageTanks
Charging Tanks
Crude Distillation Units
32
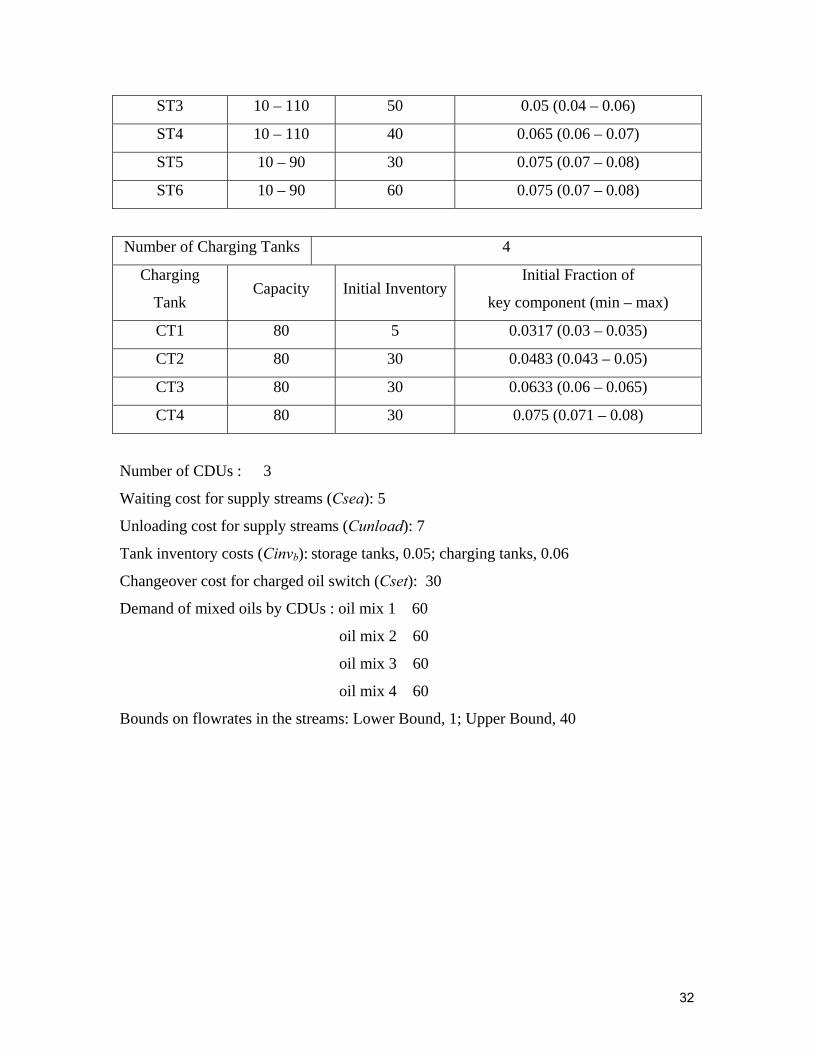
ST3 10 – 110 50 0.05 (0.04 – 0.06)
ST4 10 – 110 40 0.065 (0.06 – 0.07)
ST5 10 – 90 30 0.075 (0.07 – 0.08)
ST6 10 – 90 60 0.075 (0.07 – 0.08)
Number of Charging Tanks 4
Charging
Tank Capacity Initial Inventory
Initial Fraction of
key component (min – max)
CT1 80 5 0.0317 (0.03 – 0.035)
CT2 80 30 0.0483 (0.043 – 0.05)
CT3 80 30 0.0633 (0.06 – 0.065)
CT4 80 30 0.075 (0.071 – 0.08)
Number of CDUs : 3
Waiting cost for supply streams (Csea): 5
Unloading cost for supply streams (Cunload): 7
Tank inventory costs (Cinvb): storage tanks, 0.05; charging tanks, 0.06
Changeover cost for charged oil switch (Cset): 30
Demand of mixed oils by CDUs : oil mix 1 60
oil mix 2 60
oil mix 3 60
oil mix 4 60
Bounds on flowrates in the streams: Lower Bound, 1; Upper Bound, 40

33
Crude supply to storage tanks
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
time (hrs) -->
ST1
ST2
ST3
ST4
ST5
ST6
IN1
IN3
IN2
IN1
60
60
555
(Storage tank 6)
(Storage tank 5)
(Storage tank 4)
(Storage tank 3)
(Storage tank 2)
(Storage tank 1)
Crude transfers between storage and charging tanks
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15time (hrs) -->
CT3
CT2
CT4
CT1
ST6
ST5
ST4
ST3
ST2
ST150
10
20
30
30
5
(Charging tank 4)
(Charging tank 3)
(Charging tank 2)
(Charging tank 1)

34
Charging schedule for distillation units
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
time (hrs) -->
DU2
DU1
DU3CT4CT3CT4
CT2CT3
CT1CT2
303030
3030
6030
Distillation unit 3
Distillation unit 2
Distillation unit 1
Fig. 10 Optimal schedule for example 3
On solving the problem to optimality using the proposed algorithm, we get a
solution of 383.69, which is globally optimal within a tolerance of 1 %.
Computational results
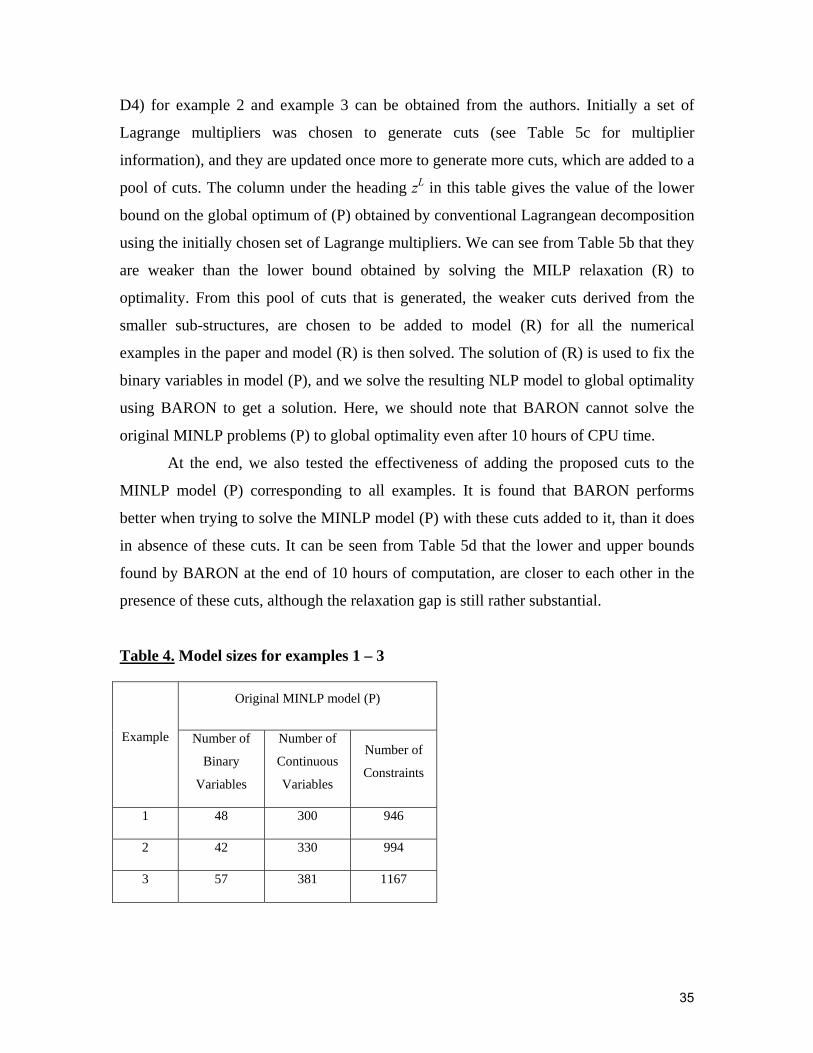
The model sizes for the different examples are shown in Table 4. The new
formulation is quite efficient for these crude oil scheduling problems and we obtain good
solutions to the scheduling problem at the very first iteration of the proposed algorithm as
seen in Table 5a. The algorithm finds the optima and proves their global optimality in
tractable computational times. The addition of cutting planes to the MILP relaxation (R)
as described in the algorithm decreases the number of nodes in the branch and bound tree
for solving the MILP relaxation, and hence the solution time for solving the MILP. This
is evident from Table 5b. The cuts added to the relaxation (R) tighten the lower bound at
the root node of the branch and bound tree for the MILP, which contributes to reducing
the number of nodes in the tree to about one third for solving the MILP.
For all the examples, the network structure is split into D1 and D2 (Fig. 2) and
also into D3 and D4 (Fig. 3). The information about the sub-structures (D1, D2, D3 and
35
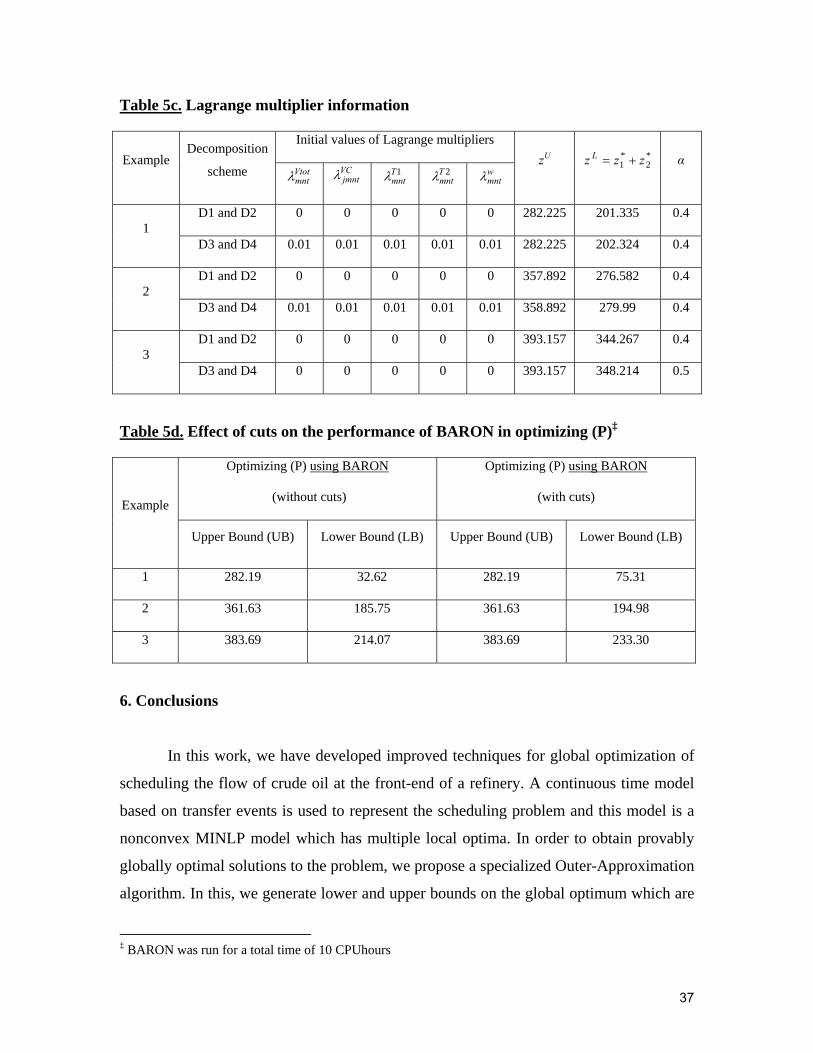
D4) for example 2 and example 3 can be obtained from the authors. Initially a set of
Lagrange multipliers was chosen to generate cuts (see Table 5c for multiplier
information), and they are updated once more to generate more cuts, which are added to a
pool of cuts. The column under the heading zL in this table gives the value of the lower
bound on the global optimum of (P) obtained by conventional Lagrangean decomposition
using the initially chosen set of Lagrange multipliers. We can see from Table 5b that they
are weaker than the lower bound obtained by solving the MILP relaxation (R) to
optimality. From this pool of cuts that is generated, the weaker cuts derived from the
smaller sub-structures, are chosen to be added to model (R) for all the numerical
examples in the paper and model (R) is then solved. The solution of (R) is used to fix the
binary variables in model (P), and we solve the resulting NLP model to global optimality
using BARON to get a solution. Here, we should note that BARON cannot solve the
original MINLP problems (P) to global optimality even after 10 hours of CPU time.
At the end, we also tested the effectiveness of adding the proposed cuts to the
MINLP model (P) corresponding to all examples. It is found that BARON performs
better when trying to solve the MINLP model (P) with these cuts added to it, than it does
in absence of these cuts. It can be seen from Table 5d that the lower and upper bounds
found by BARON at the end of 10 hours of computation, are closer to each other in the
presence of these cuts, although the relaxation gap is still rather substantial.
Table 4. Model sizes for examples 1 – 3
Original MINLP model (P)
Example Number of
Binary
Variables
Number of
Continuous
Variables
Number of
Constraints
1 48 300 946
2 42 330 994
3 57 381 1167

36
Table 5a. Numerical results for test examples 1 – 3
Example
Lower bound
[obtained by solving
relaxation (RP) ]
(zRP)
Upper bound
[on solving
(P-NLP) using
BARON ]
(zP-NLP)
Relaxation
gap (%)
Total time
taken for one
iteration† of
algorithm
(CPUsecs)
Local optimum
(using
DICOPT)
1 281.14 282.19 0.37 827.7 291.93
2 351.32 359.48 2.27 6913.9 361.63
3 383.69 383.69 0 8928.6 383.69
Table 5b. Comparison of relaxations with and without cuts
Solving MILP model (R) Solving MILP model (RP)
(including proposed cuts)
Example Solution
(zR)
LP
relaxation
at root
node
No. of
nodes
Time
taken to
solve (R)
(CPUsecs)
Solution
(zRP)
LP
relaxation
at root
node
No. of
nodes
Time
taken to
solve (RP)
(CPUsecs)
1 281.14 -55.24 940800 1953.3 281.14 68.45 334300 758.8
2 351.32 113.35 931700 14481.7 351.32 133.80 310600 5873.2
3 383.69 147.24 3029600 15874.8 383.69 189.19 1258100 8025.9
† Total time includes time for generating a pool of cuts, updating Lagrange multipliers, solving the relaxation (RP) using CPLEX and solving (P-NLP) using BARON
37
Table 5c. Lagrange multiplier information
Initial values of Lagrange multipliers Example
Decomposition
scheme Vtotmntλ VC
jmntλ 1Tmntλ 2T
mntλ wmntλ
zU *2
*1 zzz L += α
D1 and D2 0 0 0 0 0 282.225 201.335 0.4 1
D3 and D4 0.01 0.01 0.01 0.01 0.01 282.225 202.324 0.4
D1 and D2 0 0 0 0 0 357.892 276.582 0.4 2
D3 and D4 0.01 0.01 0.01 0.01 0.01 358.892 279.99 0.4
D1 and D2 0 0 0 0 0 393.157 344.267 0.4 3
D3 and D4 0 0 0 0 0 393.157 348.214 0.5
Table 5d. Effect of cuts on the performance of BARON in optimizing (P)‡
Optimizing (P) using BARON
(without cuts)
Optimizing (P) using BARON
(with cuts) Example
Upper Bound (UB) Lower Bound (LB) Upper Bound (UB) Lower Bound (LB)
1 282.19 32.62 282.19 75.31
2 361.63 185.75 361.63 194.98
3 383.69 214.07 383.69 233.30
6. Conclusions
In this work, we have developed improved techniques for global optimization of
scheduling the flow of crude oil at the front-end of a refinery. A continuous time model
based on transfer events is used to represent the scheduling problem and this model is a
nonconvex MINLP model which has multiple local optima. In order to obtain provably
globally optimal solutions to the problem, we propose a specialized Outer-Approximation
algorithm. In this, we generate lower and upper bounds on the global optimum which are
‡ BARON was run for a total time of 10 CPUhours
38
converged to a specified tolerance. A rigorous lower bound on the global optimum is
obtained by solving a MILP relaxation of the original problem. To reduce the
computational effort required in solving this MILP relaxation, cutting planes derived
from a spatial decomposition of the network are added to the MILP model. The solution
of the MILP is used in a heuristic to obtain a feasible solution to the MINLP, which
serves as an upper bound. The application of the proposed algorithm on different
examples helps in significantly reducing the computational effort involved in solving
such problems.
Acknowledgments
The authors gratefully acknowledge financial support from the National Science
Foundation under Grant CTS-0521769 and from ExxonMobil Research and Engineering.
Nomenclature
Indices
a tanks input source
b crude tank
c tank output destination
d distillation unit
g charging tank
j component
k node in the network
m source unit of split pipline
n destination unit of split pipeline
p supply stream
s storage tank
t transfer event
Sets
A Set of tanks input sources
39
Ab Set of inputs to a tank b
As Set of inputs to storage tank s
B Set of tanks
BD1 Set of tanks belonging to sub-structure D1
BD2 Set of tanks belonging to sub-structure D2
C Set of tank output destinations
Cb Set of outputs from a tank b
Cs Set of outputs from storage tank s
Cg Set of outputs from charging tank g
D Set of distillation units
DD1 Set of distillation units present in structure D1
DD2 Set of distillation units present in structure D2
Dg Set of distillation units that can be charged by charging tank g
G(B) Set of charging tanks
Gd Set of charging tanks that charge distillation unit d
J Set of components
K Set of nodes in the network
M Set of source units of the split pipelines
Nm Set of destination units of split pipelines with source m
P Set of supply streams
PD1 Set of supply streams present in sub-structure D1
PD2 Set of supply streams present in sub-structure D2
S(B) Set of storage tanks
Sp Set of storage tanks connected to supply stream p
T Set of transfer events
Parameters
Cinvb Inventory maintenance cost for tank b
Csea Waiting cost for supply streams
Cset Changeover cost for charged oil switch
Cunload Unloading cost for supply streams

40
UabF Upper bound on flowrate from a to b
LabF Lower bound on flowrate from a to b
Ljbf Lower bound on fraction of component j inside tank b
Ujbf Upper bound on fraction of component j inside tank b
supplyjpf Fraction of component j in supply stream p
H Time horizon for scheduling totinit
bI − Initial total inventory of tank b
initjbI Initial inventory of component j in tank b
LbI Lower bound on total inventory in a tank b
UbI Upper bound on total inventory in a tank b
ND Number of distillation units in the network
NDD1 Number of distillation units in sub-structure D1
NDD2 Number of distillation units in sub-structure D2
NE Number of transfer events arrivalpT Arrival time of crude in supply stream p
LabV Lower bound on flow from a to b L
bcV Lower bound on flow from b to c U
abV Upper bound on flow from a to b
UbcV Upper bound on flow from b to c
supplypV Total volume of crude oil arriving in supply stream p
Vtotmntλ Lagrange multiplier VCjmntλ Lagrange multiplier
1Tmntλ Lagrange multiplier
2Tmntλ Lagrange multiplier wmntλ Lagrange multiplier

41
Continuous Variables totbtI Total inventory of tank b at the end of transfer event t
jbtI Inventory of component j in tank b at the end of transfer event t
1abtT Starting time of a transfer from a to b in transfer event t
1bctT Starting time of a transfer from b to c in transfer event t
2abtT Ending time of a transfer from a to b in transfer event t
2bctT Ending time of a transfer from b to c in transfer event t
startpT Initial starting time of crude transfer from supply stream p
endpT Overall ending time of crude transfer from supply stream p
totabtV Total flow from a to b in transfer event t
totbctV Total flow from b to c in transfer event t
totjabtV Flow of component j from a from b in transfer event t
totjbctV Flow of component j from b from c in transfer event t
Binary variables
abtw Equal to 1 if there is a flow from a to b in transfer event t else 0
bctw Equal to 1 if there is a flow from b to c in transfer event t else 0
References
1. Adjiman, C. S.; Androulakis, I. P.; Floudas, C. A. (2000): Global Optimization of Mixed-Integer
Nonlinear Problems. American Institute of Chemical Engineering Journal, 46, 1769 -1797.
2. Bergamini, M. L.; Aguirre, P.; Grossmann, I. E. (2005). Logic-based outer approximation for
globally optimal synthesis of process networks. Computers and Chemical Engineering, 29, 1914 -
1933.
3. Brooke, A.; Kendrick, D.; Meeraus, A; Raman, R. (1998). GAMS: A User’s Guide, Release 2.50.
GAMS Development Corporation.
4. Duran, M. A.; Grossmann, I. E. (1986). An Outer-Approximation Algorithm for a Class of
Mixed-Integer Nonlinear Programs. Mathematical Programming, 36, 307 -339.
42
5. Fisher, M. L. (1981). The Lagrangian Relaxation Method for solving Integer Programming
Problems. Management Science, 27, 1 -18
6. Fletcher, R.; Leyffer, S. (1994). Solving Mixed Integer Nonlinear Programs by Outer
Approximation. Mathematical Programming, 66, 327 -349.
7. Floudas, C. A.; Lin, X. (2004). Continuous-Time versus Discrete-Time Approaches for
Scheduling of Chemical Processes: A Review. Computers and Chemical Engineering, 28, 2109 -
2129.
8. Furman, K. C.; Jia, Z.; Ierapetritou, M. G. (2006). A Robust Event-Based Continuous Time
Formulation for Tank Transfer Scheduling. Work in Progress.
9. Grossmann, I. E. (2002). Review of Nonlinear Mixed-Integer and Disjunctive Programming
Techniques. Optimization and Engineering, 3, 227 -252.
10. Jackson, J. R.; Grossmann, I. E. (2003). Temporal Decomposition Scheme for Nonlinear Multisite
Production Planning and Distribution Models. Industrial and Engineering Chemistry Research, 42,
3045 -3055.
11. Jia, Z.; Ierapetritou, M. G.; Kelly, J. D. (2003). Refinery Short-Term Scheduling Using
Continuous Time Formulation: Crude Oil Operations. Industrial and Engineering Chemistry
Research, 42, 3085 -3097.
12. Karuppiah, R.; Grossmann, I. E. (2006). A Lagrangean based Branch-and-Cut algorithm for global
optimization of nonconvex Mixed-Integer Nonlinear Programs with decomposable structures,
Submitted to Journal of Global Optimization.
13. Kesavan, P.; Allgor, R. J.; Gatzke, E. P.; Barton, P. I. (2004). Outer Approximation Algorithms
for Separable Nonconvex Mixed-Integer Nonlinear Programs. Mathematical Programming, 100,
517 -535.
14. Lee, H.; Pinto, J. M.; Grossmann, I. E.; Park, S. (1996). Mixed Integer Linear Programming
Model for Refinery Short-Term Scheduling of Crude Oil Unloading with Inventory Management.
Industrial and Engineering Chemistry Research, 35, 1630 -1641.
15. McCormick, G. P. (1976). Computability of Global Solutions to Factorable Nonconvex Programs
– Part I – Convex Underestimating Problems. Mathematical Programming, 10, 146 -175.
16. Mendez, C. A.; Cerda, J.; Grossmann, I. E.; Harjunkoski, I; Fahl, M. (2006). State-of-the-art
review of optimization methods for short-term scheduling of batch processes. Computers and
Chemical Engineering, 30, 913 -946.
17. Pinto, J. M.; Joly, M.; Moro, L. F. L. (2000). Planning and Scheduling Models for Refinery
Operations. Computers and Chemical Engineering, 24, 2259 -2276.
18. Sahinidis, N. (1996). BARON: A General Purpose Global Optimization Software Package.
Journal of Global Optimization, 8, 201 -205.

43
19. Shah, N. (1996). Mathematical Programming Techniques for Crude Oil Scheduling. Computers
and Chemical Engineering (Suppl.), 20, S1227 –S1232.
20. Sherali, H. D.; Alameddine, A. (1992). A New Reformulation Linearization Technique for
Bilinear Programming Problems. Journal of Global Optimization, 2, 379-410.
21. Tawarmalani, M.; Sahinidis, N. (2002). Convexification and Global Optimization in Continuous
and Mixed-Integer Nonlinear Programming: Theory, Algorithms, Software and Applications.
Kluwer Academic Publishers : Dordrecht, The Netherlands
22. Tawarmalani, M.; Sahindis, N. V. (2004). Global Optimization of Mixed-Integer Nonlinear
Programs: A Theoretical and Computational Study. Mathematical Programming, 99, 563 -591.
23. Wei, J.; Furman, K. C.; Duran, M. A.; Tawarmalani, M.; Sahinidis, N. V. (2005) Global
Optimization for Stochastic Nonconvex Mixed Integer Nonlinear Programs. IFORS 2005,
Honolulu, Hawaii.
24. Zamora, J. M.; Grossmann, I. E. (1999). A Branch and Bound Algorithm for Problems with
Concave Univariate, Bilinear and Linear Fractional Terms. Journal of Global Optimization, 14 (3),
217 -249.
Appendix : Updating Lagrange multipliers
Fisher (1981) proposed a sub-gradient method to update Lagrange multipliers, to
be used in solving a Lagrangean relaxation of the original problem, starting from an
initial arbitrary value of the multipliers. This technique is tailored to suit our problem in
order to obtain updated values of Lagrange multipliers starting with random initial
values. The generated Lagrange multipliers are then used to derive cuts to be added to the
relaxation. For solving the models (LD1-R) and (LD2-R) resulting from a decomposition
of the network structure into sub-structures D1 and D2, we succesively generate the
multipliers as follows:
[ ] [ ] ( ) ( ) TtNnMmVVts m
ktot
mnt
ktot
mntkkVtot
mntkVtot
mnt ∈∀∈∀∈∀⎥⎦
⎤⎢⎣
⎡−+=
+,,
*2,*1,1λλ
[ ] [ ] ( ) ( ) TtNnMmJjVVts m
k
jmnt
k
jmntkkVC
jmntkVC
jmnt ∈∀∈∀∈∀∈∀⎥⎦
⎤⎢⎣
⎡−+=
+,,,
*2*11λλ
[ ] [ ] ( ) ( ) TtNnMmTTts m
k
mnt
k
mntkkT
mntkT
mnt ∈∀∈∀∈∀⎥⎦
⎤⎢⎣
⎡−+=
+,,
*2,1*1,1111 λλ
[ ] [ ] ( ) ( ) TtNnMmTTts m
k
mnt
k
mntkkT
mntkT
mnt ∈∀∈∀∈∀⎥⎦
⎤⎢⎣
⎡−+=
+,,
*2,2*1,2212 λλ

44
where tsk is a scalar step size and ( ) ( ) ( ) ( ) ( )⎭⎬⎫
⎩⎨⎧
∀k
mnt
k
mnt
k
mnt
k
jmnt
ktot
mnt wTTjVV*1*1,2*1,1*1*1, ,,,, and
( ) ( ) ( ) ( ) ( )⎭⎬⎫
⎩⎨⎧
∀k
mnt
k
mnt
k
mnt
k
jmnt
ktot
mnt wTTjVV*2*2,2*2,1*2*2, ,,,, are the optimal values of the duplicate
variables, at the kth iteration, obtained from the solution of the sub-problems (LD1-R)
and (LD2-R), respectively. The following formula is used to calculate the values of tsk at
every iteration k:
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )∑ ∑∑ ∑∈ ∈ ⎥
⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛−+⎟⎟
⎠
⎞⎜⎜⎝
⎛−+⎟⎟
⎠
⎞⎜⎜⎝
⎛−+⎟⎟
⎠
⎞⎜⎜⎝
⎛−+⎟⎟
⎠
⎞⎜⎜⎝
⎛−
−=
Mm Nn t
k
mnt
k
mnt
k
mnt
k
mntj
k
mnt
k
mnt
k
jmnt
k
jmnt
ktotmnt
ktotmnt
kLUkk
m
wwTTTTVVVV
zzts*2*1*2,2*1,2*2,1*1,1*2*1*2,*1,
))(( λα
where kα is a scalar chosen between 0 and 2, )( kLz λ is the sum of the obejctives of the
sub-models (LD1-R) and (LD2-R), when the multipliers are set to kλ , and zU is the value
of the best found feasible solution to (R). The parameter values used for updating the
multipliers in the numerical examples in the paper is given in Table 5c. The multiplier
update was carried out only once in this work. The updating scheme remains the same if
the network is decomposed into sub-structures D3 and D4 and the sub-models pertaining
to those are to be solved.
[ ] [ ] ( ) ( ) TtNnMmwwts m
k
mnt
k
mntkkw
mntkw
mnt ∈∀∈∀∈∀⎥⎦
⎤⎢⎣
⎡−+=
+,,
*2*11λλ