Painting for the artistically challenged … By the artistically challenged.
Upload
thomasina-flynnCategory
view
229download
6
Gesture-BasedWheelchairControl for Physically-
Challenged
ARJUN ASHOK V ARUNKUMAR M
DANIEL C J NIVED KRISHNAN
THE TEAM
CONTENTS Abstract Problem Definition Project Overview Implementation Verification Future Work References
ABSTRACT We have developed a gesture-controlled
wheelchair system for use by quadriplegics and other physically-disabled persons.
Salient features: Effortless to use Customizable Economical Power-efficient Non-intrusive

PROBLEM DEFINITION Existing powered wheelchairs demand
exertion of force for controlling them, making them unusable to a class of the physically-challenged called quadriplegics.
Movements such as pressing buttons or controlling a joystick are impossible for quadriplegics, who lack fine motor control.
PROJECT OVERVIEW The quadriplegics often retain some
imprecise motion of their fingers. Therefore, the best option is a gesture-based interaction with their environment, in particular their wheelchairs.
We have developed a robust, real-time vision-based hand gesture recognition engine reliable enough for steering a wheelchair.
PROJECT OVERVIEW Hardware specification:
IR-sensitive USB webcam Diffusion masks + mounting/enclosure x64/x86 PC platform Stripped USB keyboard circuit PIC 16F877A microcontroller-based interface DC motor steering mechanism with ULN2804
and relay-based H-bridge
Software specification: MATLAB® from The MathWorks™ Win.32/64-based operating system PIC-based H-bridge control
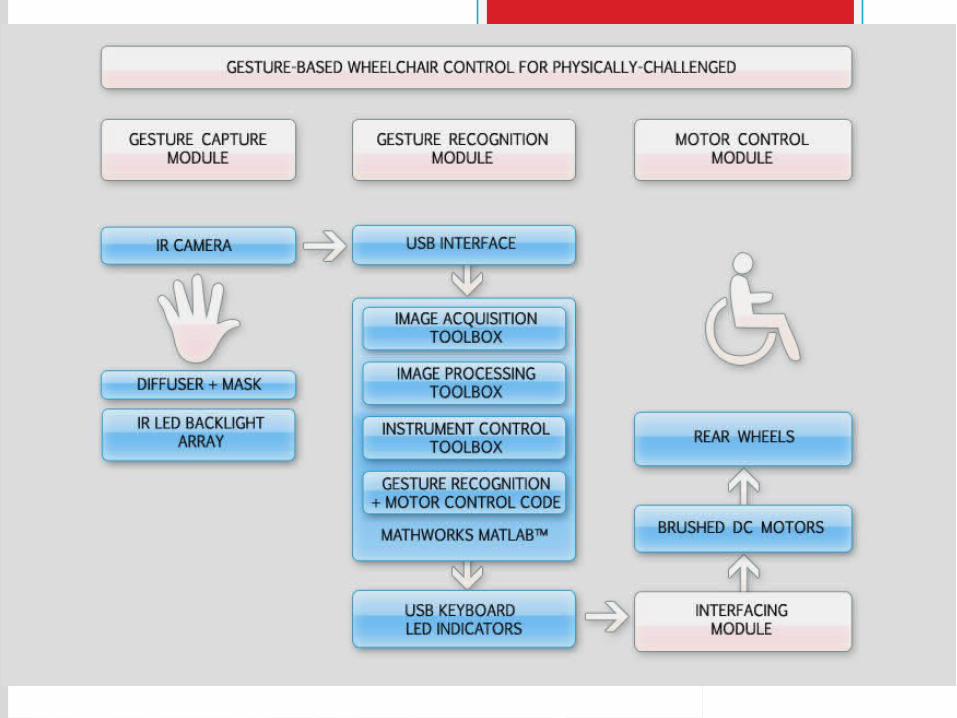
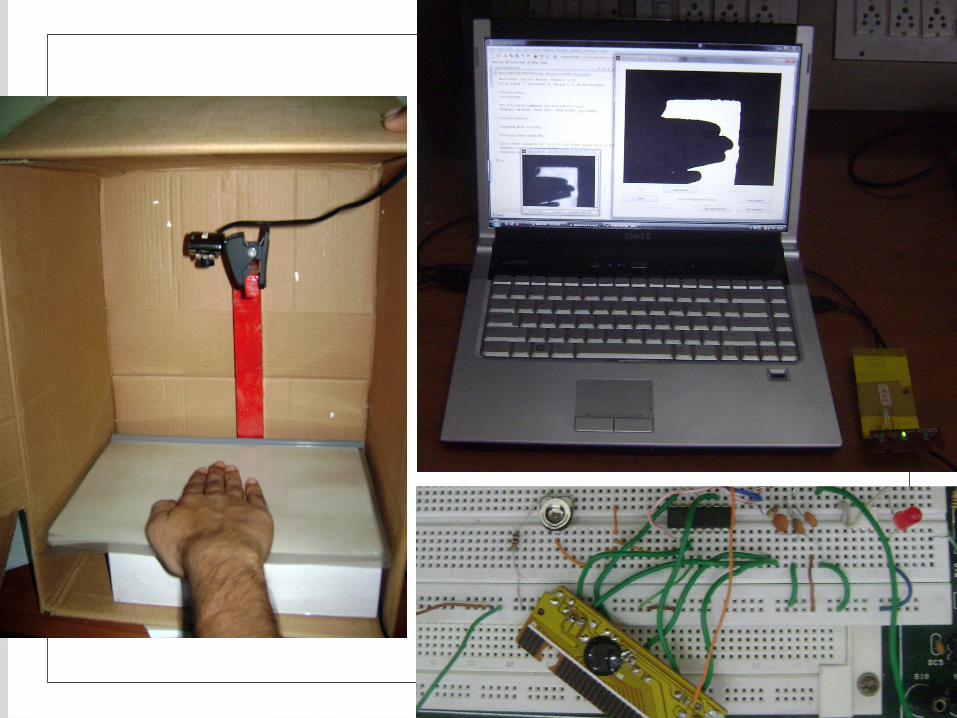
IMPLEMENTATION Gesture Capture Module developed.
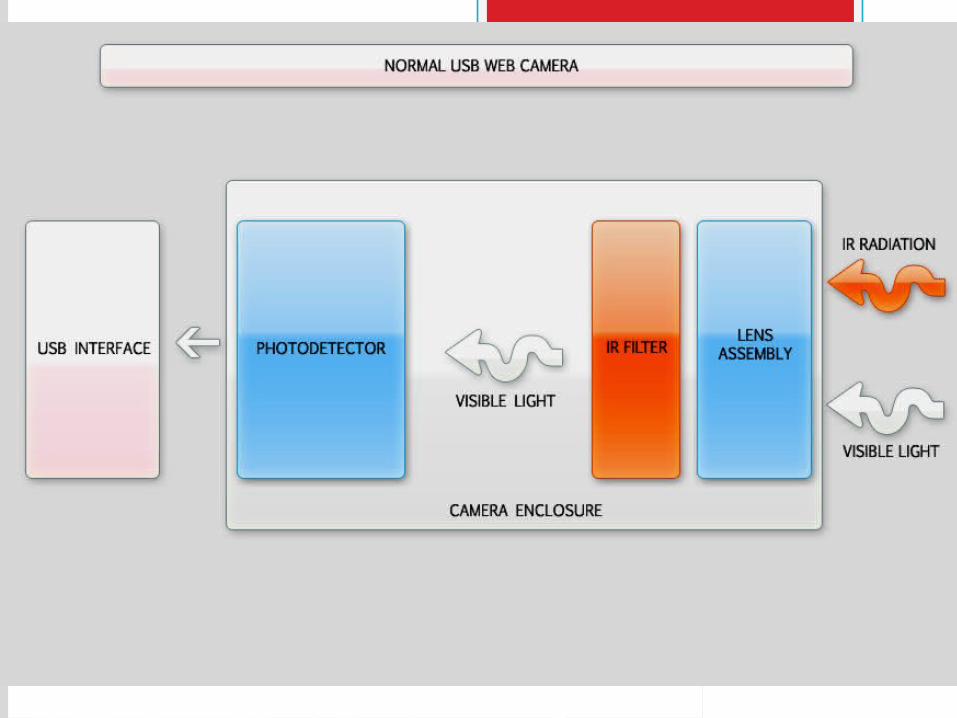
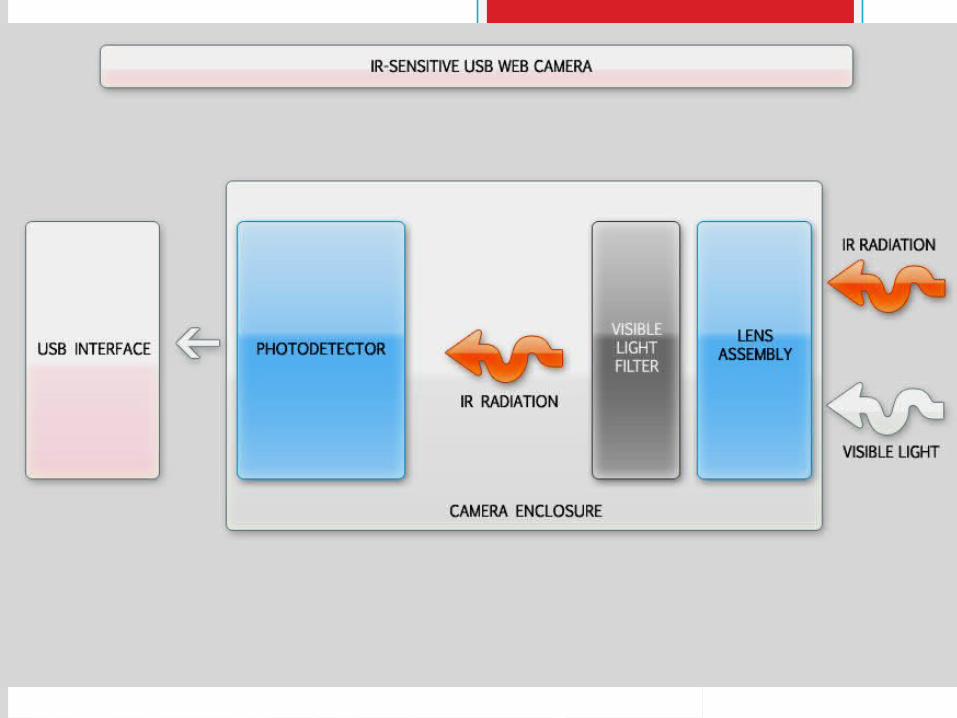
A regular web-camera was modified into an IR-sensitive version.
An IR-illuminated backlit surface for gesture-capture was created.We used IR LEDs in a 8x8 matrix layout.
We used an assembly of tracing paper sheets to create a diffuser for IR radiation.
We used an aluminium foil mask to define an active area.
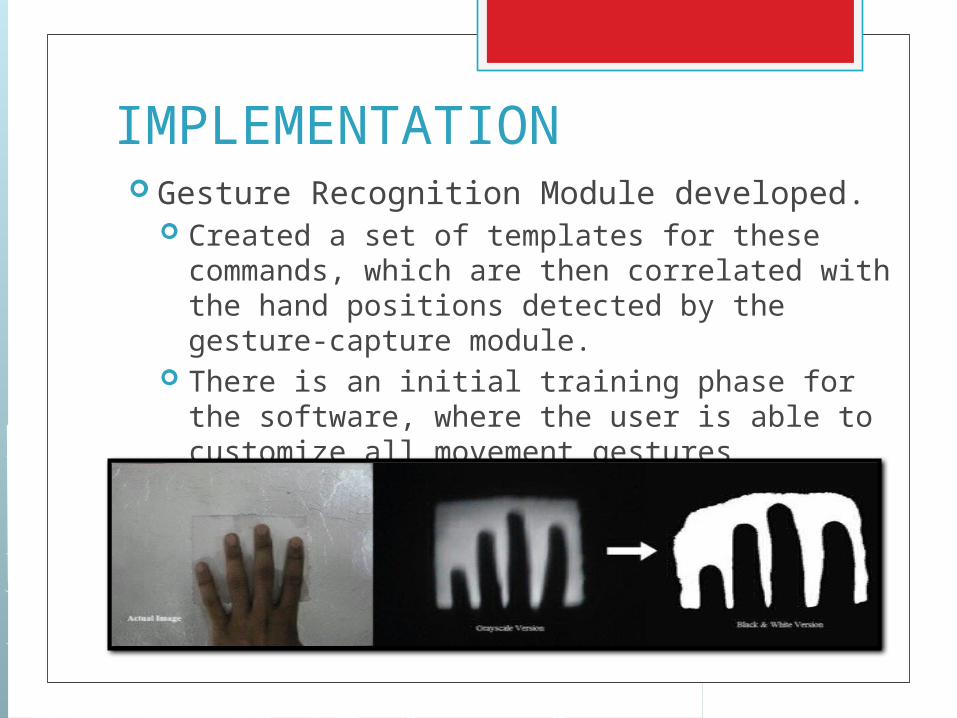
IMPLEMENTATION Gesture Recognition Module developed.
Successfully captured and processed images from IR-camera in real-time.
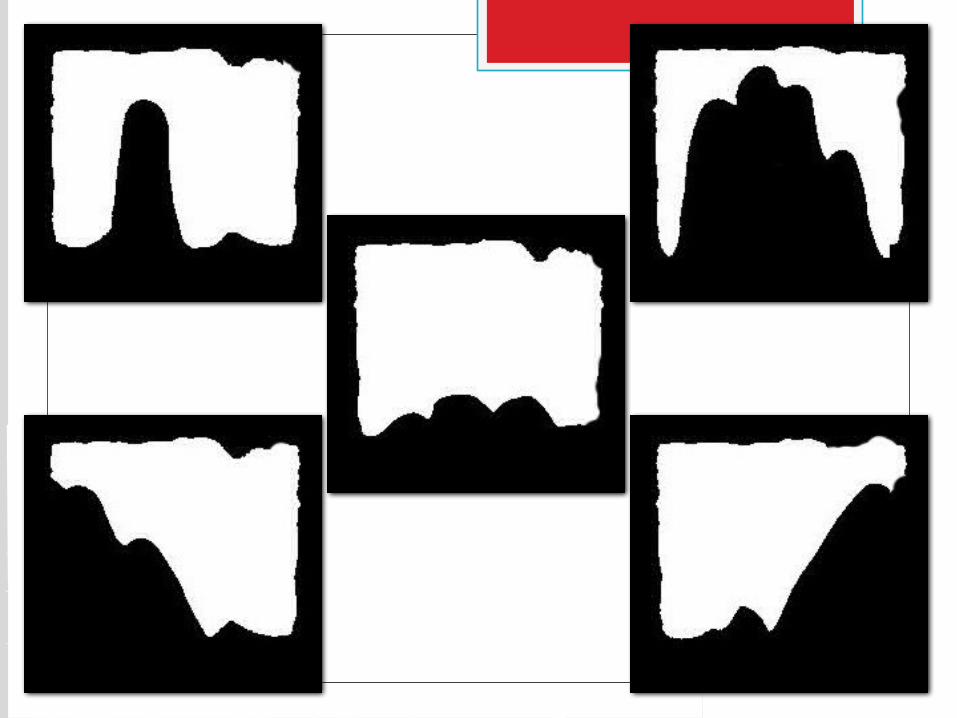
Defined a protocol of gestures.These are extremely simplified so as to be easy to use by the physically-challenged. Move forward Move backward Turn left Turn right Stop/brake
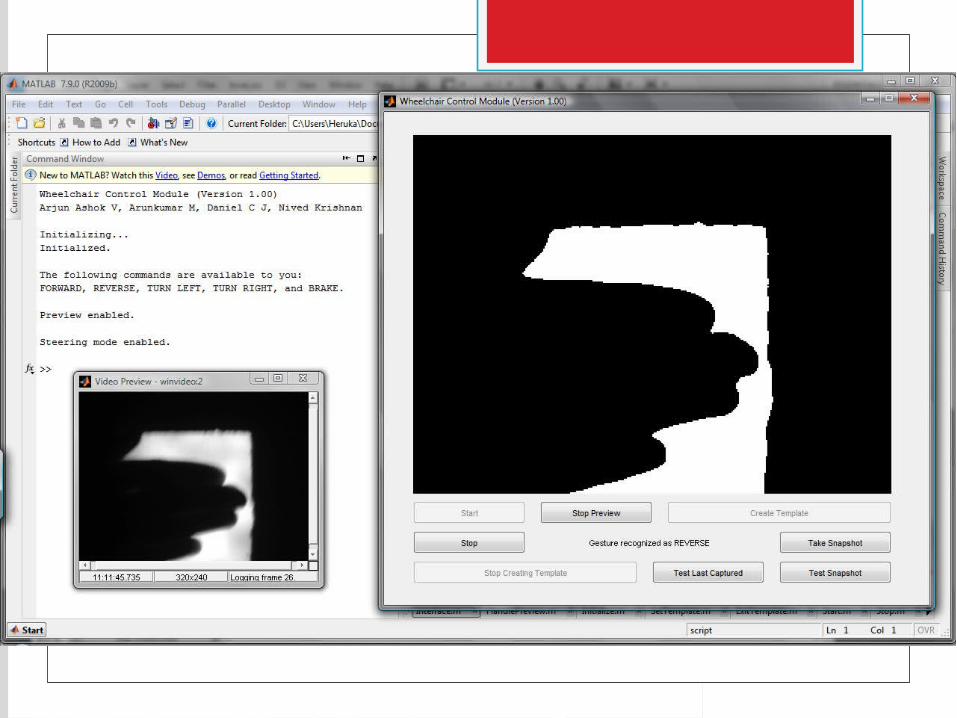
IMPLEMENTATION Gesture Recognition Module developed.
Created a set of templates for these commands, which are then correlated with the hand positions detected by the gesture-capture module.
There is an initial training phase for the software, where the user is able to customize all movement gestures according to their specific needs.
Return
IMPLEMENTATION Interfacing Module developed.
A USB keyboard circuit was stripped to give access to the three indicator LEDs – Scroll Lock, Caps Lock, Num Lock.
The LEDs were controlled from keyboard control libraries linked to MATLAB®, according to the gesture recognized.
This gives a 3-bit code for each gesture. These codes are given to a PIC16F877A
microcontroller, which produces outputs to control an H-bridge circuit.
IMPLEMENTATION
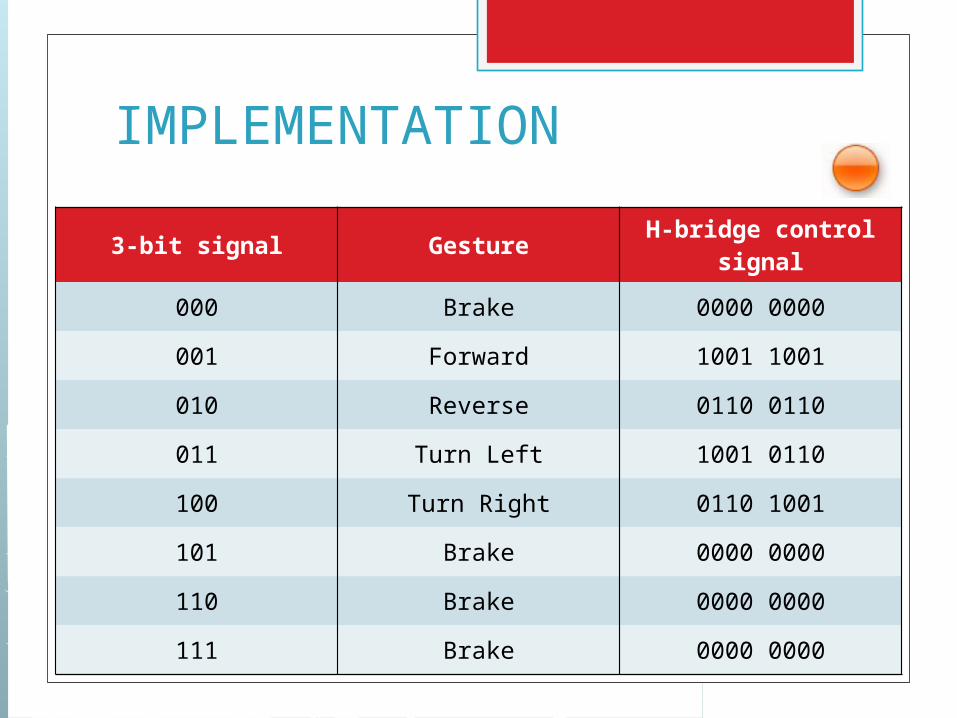
3-bit signal Gesture H-bridge control signal
000 Brake 0000 0000
001 Forward 1001 1001
010 Reverse 0110 0110
011 Turn Left 1001 0110
100 Turn Right 0110 1001
101 Brake 0000 0000
110 Brake 0000 0000
111 Brake 0000 0000
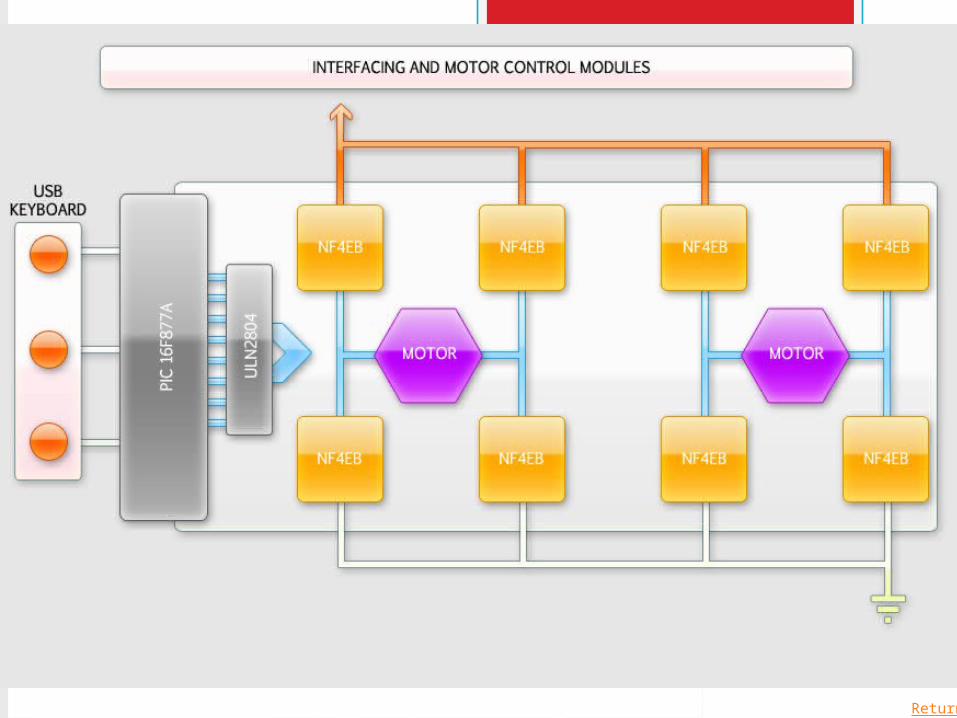
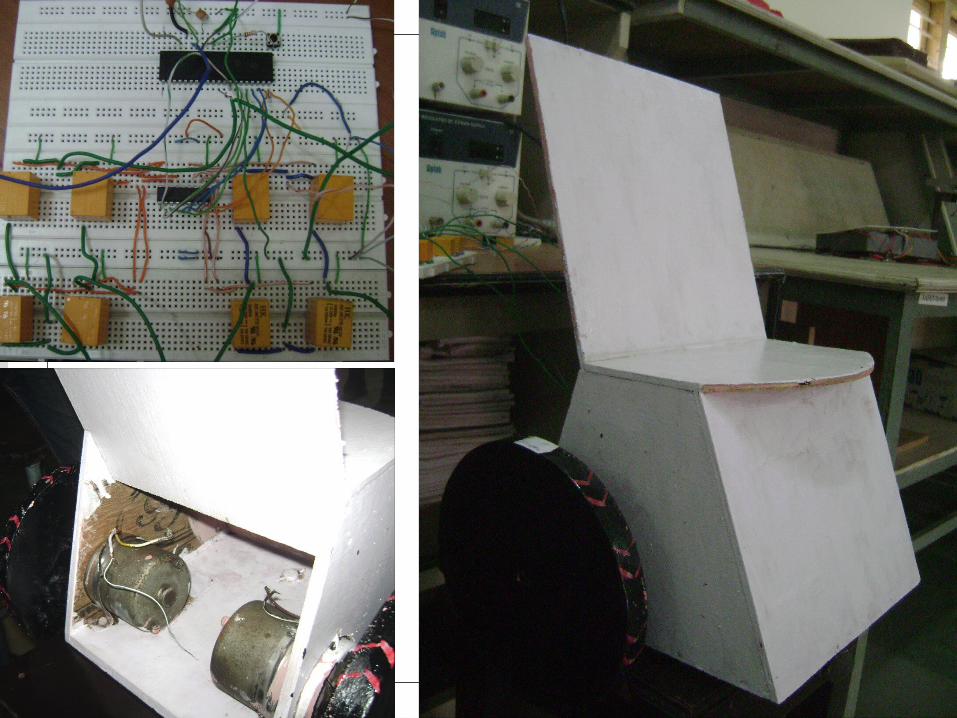
IMPLEMENTATION Motor Control Module developed.
Two DC motors are controlled based on inputs from the Interfacing Module.
These inputs are linked to an H-bridge circuit through ULN2804.
An H-bridge circuit consisting of 8 relays is used to direct the two motors attached to the rear wheels of the wheelchair.
IMPLEMENTATION Both the rear wheels should turn in the same
direction for forward/reverse motion of wheelchair.
To turn left, the left wheel should turn backward while right wheel turns forward. The reverse is true for right turns.
In order to brake, the wheels are made to turn in the opposite direction to current spin for quarter of a second. Then the motors are disconnected from the supply.
VERIFICATION Gesture detection verification
Gestures that are captured have been correlated in real time with the templates that are stored.
Satisfactory results have been achieved. DC motor motion test
All possible combinations of 3-bit data were fed to the microcontroller to test motion of DC motors. The inputs were fed externally.
The wheels connected to DC motors turned as expected.
VERIFICATION System Test
Motion of wheels has been tested as per the input generated by the gesture capture module. The input fed by PC via USB cable is decoded by microcontroller.
Each gesture generates a different 3-bit signal. Redundant signals have never been generated.
FUTURE PROSPECTS Porting the whole system to an embedded
system based on the Intel® Atom™ processor.
Fine-tuning the system for power-efficiency and compactness.
REFERENCES Real-Time Vision-Based Hand Tracking and
Gesture Recognition by Qing Chen. Digital Image Processing by William K Pratt. Fundamentals of Digital Image Processing by
Anil K Jain. MATLAB Image Processing Toolbox for use
with MATLAB.

THANK YOU