Geometric_positioning (KTH-5392's conflicted copy 2014-03-05)
30
Wireless network positioning: A geometric approach Mohammad Reza Gholami School of Electrical Engineering Signal Processing KTH Royal Institute of Technology E. Ström, H. Wymreesch, M. Rydström, Y. Censor, S. Gezici, L. Tetruashvili, and colleagues at NewCom++ March 5, 2014
-
Upload
m-reza-gholami -
Category
Documents
-
view
38 -
download
5
Transcript of Geometric_positioning (KTH-5392's conflicted copy 2014-03-05)

Wireless network positioning: A geometric approach
Mohammad Reza GholamiSchool of Electrical Engineering
Signal Processing KTH Royal Institute of Technology
E. Ström, H. Wymreesch, M. Rydström, Y. Censor, S. Gezici, L. Tetruashvili, and colleagues at NewCom++
March 5, 2014

Global positioning system (GPS)
2
http://en.wikipedia.org/wiki/Global_Positioning_System

• Limited access
• Latency • Power constraint
3
Position from the network
GPS drawbacks for positioning

Outline
• Introduction• Positioning problem• Geometric interpretation• Positioning as a convex feasibility problem• Upper bounds on a single position estimate (deterministic bound)
• Quantifying the feasible sets • Conclusions and future work
4

WSN: position information for processing the data GPS not applicable in some scenariosExtracting the position information from the network
Wireless sensor networks (WSNs) positioning
5


7

8
Problem statement

9
Problem statement
- MLE- Least squares- Centralized- Distributed- Geometric estimators…
- Noncooperative- Cooperative

Required positioning accuracy
• Complex algorithms, e.g., MLE (difficult nonconvex), to obtain high level of accuracy
• Simple algorithms to provide good initial points • A geometric interpretation • Main idea: confining the location of a target to a bounded
feasible set based on the measurements
10
* M. Hazas, J. Scott, and J. Krumm, `` Location-aware computing comes of age,” Computer, vol. 37, no. 2, pp. 95-97, 2004.

11
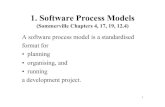
Geometric interpretation: review(noncooperative)
Histogram of the ranging error for the LOS and NLOS condition [1]
* H. Wymeersch, S. Maranò, W. M. Gifford, M. Z. Win, “A machine learning approach to ranging error mitigation for UWB localization,” IEEE Trans. Commun., pp. 1719-1728, vol. 60, June 2012.

Projection onto convex sets (POCS)
[1] D. Blatt and A. O. Hero, ``Energy-based sensor network source localization via projection onto convex sets,” IEEE Trans. Signal Processing, pp. 3614-3619, 2006.[2] A. O. Hero and D. Blatt, ``Sensor network source localization via projection onto convex sets (POCS),” IEEE ICASSP, pp. 689-692, vol. 3, 2005.[3] M. Rydström, E. G. Ström, and Arne Svensson, ``Robust sensor network positioning based on projections onto circular and hyperbolic convex sets (POCS),” IEEE SPAWC, 2006.[4] M. Rydström, L. Reggiani, E. G. Ström, and Arne Svensson, ``Suboptimal soft range estimators with applications in UWB sensor networks,” IEEE Trans. Signal Processing, pp. 4856-4866, vol. 56, 2008.[5] J. Wang and P. A. Regalia, `` Sensor network localization via boundary projections,” 43rd Ananual Conf. on Information Science and Systems, pp. 224-229, 2009.
[6] M. R. Gholami, S. Gezici, M. Rydström, and E. G. Ström, `` A distributed positioning algorithm for cooperative active and passive sensors,” IEEE PIMRC, pp. 1713- 1718, 2010.[7] M. R. Gholami, M. Rydström, E. G. Ström, ``Positioning of node using plane projection onto convex sets,” IEEE WCNC, Sydney, 2010.
12

Upper bounds on position error
Other bounds: Bound 2: maximum length based on 2-norm Bound 3: maximum length based on bounding box covering the intersection
[1] M. R. Gholami E. G. Ström, H. Wymeersch, and M. Rydström, ``On geometric upper bounds for positioning algorithms in wireless sensor networks,” submitted to Signal Processing, Oct. 2013. [Online]. Available: arXiv preprint arXiv:1201.2513.[2] M. R. Gholami, E. G. Ström, H. Wymeersch and S. Gezici, ``Upper bounds on position error of a single location estimate in wireless sensor networks,” EURASIP Journal on Advances in Signal Processing 2014, 2014:4. 13
Bound 1:

14
Numerical results
Tightness:
Relative tightness:
Estimates from the POCS approach

15
Bound 3
Bound 2
Bound 1
* M. R. Gholami et al. ``On geometric upper bounds for positioning algorithms in wireless sensor networks,” submitted to Signal Processing, Oct. 2013. [Online]. Available: arXiv preprint arXiv:1201.2513.

An application
16
* M. R. Gholami et al. ``On geometric upper bounds for positioning algorithms in wireless sensor networks,” submitted to Signal Processing, Oct. 2013. [Online]. Available: arXiv preprint arXiv:1201.2513.

Cooperative scenarios
An example:
17
Assumption:

Implicit convex feasibility problem (ICFP)
[1] M. R. Gholami et al. ``Wireless network positioning as a convex feasibility problem,” Eurasip Journal. Wireless Comunication and Networking, 2011, 2011:161.[2] M. R. Gholami et al. ``Cooperatives wireless sensor network positioning via implicit convex feasibility,” IEEE Trans. Signal processing, pp. 5830-5840, vol. 61, 2013.[3] M. R. Gholami et al. ``Robust distributed positioning algorithms for cooperative networks,” IEEE SPAWC, San Francisco, 2011.
18

CFP and ICFP
19

20
[1] M. R. Gholami et al. ``Wireless network positioning as a convex feasibility problem,” Eurasip J. Wireless Comunication and Networking, 2011, 2011:161.[2] M. R. Gholami et al. ``Cooperative wireless sensor network positioning via implicit convex feasibility,” IEEE Trans. Signal processing, pp. 5830-5840, vol. 61, 2013.[3] M. R. Gholami et al. ``Robust distributed positioning algorithms for cooperative networks,” IEEE SPAWC, San Francisco, 2011.

The proposed algorithm
21

Mathematical model
(1)
(2)
* M. R. Gholami et al. ``Cooperative wireless sensor network positioning via implicit convex feasibility,” IEEE Trans. Signal processing, pp. 5830-5840, vol. 61, 2013.
22

Numerical results
Cooperative Parallel Projection method (Coop. PPM)Cooperative Projection onto Convex set (Coop. POCS) [1]Cooperative Parallel Projection onto Boundary (Coop. PPB) [2]
[1] M. R. Gholami et al. `` Wireless network positioning as a convex feasibility problem”, Eurasip J. Wireless Commun. And Networking, vol. 2011:161, 2011.[2] T. Jia and R. Buehrer, `` A set-theoretic approach to collaborative position location for wireless networks, IEEE Trans. Mobile Comput., pp. 1264-1275, 2011.
23

24
Numerical results

Quantifying feasible regions

The Proposed algorithm
(*)
26*M. R. Gholami et al. ``Distributed bounding of feasible sets in cooperative wireless network,” IEEE Comm. Letters, pp. 1596-1599, 2013.

*M. R. Gholami et al. ``Distributed bounding of feasible sets in cooperative wireless network,” IEEE Comm. Letters, pp. 1596-1599, 2013.
The Proposed algorithm

Numerical results
28
*M. R. Gholami et al. ``Distributed bounding of feasible sets in cooperative wireless network,” IEEE Comm. Letters, pp. 1596-1599, 2013.

Positive and negative measurement errors
• The intersection no longer contains the target location• Manually manipulating the measurements
29* M. R. Gholami, E. G. Ström, H. Wymeersch and S. Gezici, ``Upper bounds on position error of a single location estimate in wireless sensor networks,” EURASIP J. on Advances in Signal Processing 2014, 2014:4.

Conclusions
Low complexity estimators based on a geometric interpretationProjection based approach: fully distributed algorithm Upper bounds on the position errors - reasonably tight in many situationsQuantifying the feasible sets in cooperative scenarios - the method converges fast - outperforms the existing approachFuture work: - improving the tightness of the upper bound - improving the convergence of positioning algorithm based on projection - convergence of the distributed bounding of feasible regions
30