COPY Geodesy and Gravity Branch Earth Sciences Division ... Conference Agenda ... Preliminary...
217
°T'2 j1il COPY ML-T-90-0032 (1I) yuSEACH PAPERS, NO. 1052 Proceedings of the Second Symposium on GPS Applications in Space WITOR: CHRISTOPHER JEKLI 13 February 1990 Approved fo public v@Ieose; distribution unlimiwed. DTIC Q .ILECTEl EARTH SCIENCES DIVISION PROJECT 2309 GEOPHYSICS LABORATORY HANSCOM AFB, MA 01731-5000 90 04 03 071
Transcript of COPY Geodesy and Gravity Branch Earth Sciences Division ... Conference Agenda ... Preliminary...

°T'2 j1il COPYML-T-90-0032 (1I)yuSEACH PAPERS, NO. 1052
Proceedings of the Second Symposium on
GPS Applications in Space
WITOR:
CHRISTOPHER JEKLI
13 February 1990
Approved fo public v@Ieose; distribution unlimiwed.
DTICQ .ILECTEl
EARTH SCIENCES DIVISION PROJECT 2309
GEOPHYSICS LABORATORYHANSCOM AFB, MA 01731-5000
90 04 03 071

"This technical report has been reviewed and is approved for publication"
(Signature)(Signature)THOMAS P. ROONEY, Chief DONALD H. ECKHARDT, DirectorGeodesy and Gravity Branch Earth Sciences Division
This report has been reviewed by the ESD Public Affairs Office (PA) and isreleasable to the National Technical Information Service (NTIS).
Qualified requestors may obtain additional copies from the Defense TechnicalInformation Center. All others should apply to the National TechnicalInformation Service.
If your address has changed, or if you wish to be removed from the mailinglist, or if the addressee is no longer employed by your organization, pleasenotify GL/IMA, Hanscom AFB, MA 01731. This will assist us in maintaininga current mailing list.

UNCLASSIFIEDSECURITY CLASSIFICATION OF THIS PAGE
Form Approved
REPORT DOCUMENTATION PAGE OMBNo. 0704-0188
la. REPORT SECURITY CLASSIFICATION Ib RESTRICTIVE MARKINGS
UNCLASSIFIED2a. SECURITY CLASSIFICATION AUTHORITY 3. DISTRIBUTION/AVAILABILITY OF REPORT
2b. DECLASSIFICATION/DOWNGRADING SCHEDULE APPROVED FOR PUBLIC RELEASE:DISTRIBUTION UNLIMITED
4. PERFORMING ORGANIZATION REPORT NUMBER(S) S. MONITORING ORGANIZATION REPORT NUMBER(S)
GL-TR-90-0032 (II)ERP, No. 1052
6a. NAME OF PERFORMING ORGANIZATION 6b. OFFICE SYMBOL 7a. NAME OF MONITORING ORGANIZATION
GEOPHYSICS (It applicable)
S1ARORATORY (AFSCQ LWGc. ADDRESS (City. State, and ZIP Code) 7b ADDRESS (City, Stite, and ZIP Code)
Hanscom Air Force BaseBedford, MA 01731-5000
Ba. NAME OF FUNDINGISPONSORING 8b. OFFICE SYMBOL 9 PROCUREMENT INSTRUMENT IDENTIFICATION NUMBERORGANIZATION (If applicable)
8c. ADDRESS (City, State, and ZIP Code) 10. SOURCE OF FUNDING NUMBERS
PROGRAM PROJECT TASK WORK UNITELEMENT NO NO NO ACCESSION NO.
51102F 2309 .2309G1 1309G11211. TITLE (Include Security Classification)
Proceedings of the Second Symposium on GPS Applications in Space,Volume I (pp.1-244) and Volume II (oo.245-458)
12. PERSONAL AUTHOR(S)
Chrisitnnher .1pkli (Pditor13a. TYPE OF REPORT 13b. TIME COVERED 14. DATE OF REPORT (Year, Month, Day) 15. PAGE COUNT
FROMientifi O_ TO _ 1990 February 13 216
16. SUPPLEMENTARY NOTATION
17. COSAI CODES , SUBJECT TERMS (Continue on reverse if necessary and identify by block number)
FIELD GROUP SUB-GROUP Global PositioninZSystem, Orbit Determination,
Space Navigation, Attitude Determination.-, -,ABSTRACT (Continue on reverse if necessary and identify by block number) C',, " -- , O L ', S T e: Mft_ _ , j I ,4
This collection of abstracts, papers, and presentation material constitutes the \Proceedings of the Second Symposium on GPS Applications in Space, which was held'at the Geophysics Laboratory (Air Force Systems Command), Hanscom Air ForceBase, Massachusetts, on 10-11 October, 1989. The Symposium was divided intofour sessions covering "Space Missions with GPS", "Orbit Determination withGPS", "Attitude Determination with GPS", and "Other Applications and Topics."Both the application of GPS to a variety of NASA and DOD space missions, as wellas corresponding GPS receiver development were discussed at this symposium.Specific applications included orbit determination of the GPS satellites and lowEarth orbiters, space navigation, and, in particular, attitude determination ofspace vehicles.,.'
20 DISTRIBUTION IAVAILABILITY OF ABSTRACT 21. ABSTRACT SECURITY CLASSIFICATIONMUNCLASSIFIED/JNLIMITED 0 SAME AS RPT. 0 DTIC USERS Unclassified
22a. NAME OF RESPONSIBLE INDIVIDUAL 22b. TELEPHONE (Include Area Code) 22c. OFFICE SYMBOLrhv, tetnpho, .Ap-a,1 A1il7-1:77-R2;; 1 (A F--,Q /I WG.
DO Form 1473, JUN 86 Previous editions are obsolete. SECURITY CLASSIFICATION OF THIS PAGE
UNCLASSIFIED

TABLE OF CONTENTS - VOLUME I
Foreword ........ ..................... .iii
Conference Agenda .................. ......... vi
Geoscience From GPS Tracking By Earth Satellites,William G. Melbourne ....... ................ 1
The GPS Precise Orbit Demonstration (POD) Experiment,E.S. (Ab) Davis ........ .................. 25
NRL Activities On Spaceborne GPS Receivers,Ronald L. Beard ........ .................. 43
GL's Proposed Satellite-to-Satellite Tracking Mission Using GPS:STAGE (STS-GPS Tracking for Anomalous Gravitation Estimation),Christopher Jekeli ....... ................. 57
GPS Attitude Determination Activities At The Naval SurfaceWarefare Center,
Alan G. Evans ........ .................. 65
GPS Application To NASA Upper Stages,A. Wayne Deaton. . . ...... .. .......... 79
Space Station Freedom GPS Implementation Plans - An Overview,Penny E. Saunders .... ............. ... ... 95
Recent Results In High-Precision GPS Orbit Determination,Stephen Lichten, Susan Kornreich Wolf, Willy I. Bertiger,Ulf J. Lindqwister, and Geoff Blewitt . . . ......... 107
Closed Loop Orbit Trim Using GPS,Penina Axelrad and Bradford W. Parkinson . . . . . . . . . 135
Global Gravity Field Mapping With GPS Tracking Of The SpaceShuttle,
George J. Priovolos, Triveni N. Upadhyay, and Christopher Jekeli . 161
Techniques Of GPS-Based Precision Orbit Determination For LowEarth Satellites,Sien C. Wu . . . . . . .. . . . . . 179 :
Ambiguity Bootstrapping To Determine GPS Orbits And Baselines,Charles C. Counselman. . . . . . . . . . . . . . . . 193
Status Of DARPA Guidance And Control Program,Larry Stotts and Joseph M. Aein . ......... ... . 205
"The Multipath Simulator", A Tool Toward Controlling Multipath, 'IGeorge A. Hajj . ..... ................. 229 y Codes
anid/oriiiat jpeia

TABLE OF CONTENTS - VOLUME II
Autonomous Integrated GPS/INS Navigation Filter For AdvancedSpacecraft Applications,
Triveni N. Upadhyay, George J. Priovolos, Harley Rhodehamel . . . 245
An Experiment In Attitude, Position And Velocity DeterminationWith Rogue GPS Receivers,
Tom K. Meehan ...... ............... ... 271
Preliminary GPS Pointing Data Results,Phil Ward . . . . .... ................. 281
Algorithms For Spacecraft Attitude Determination With GPS,Duncan B. Cox, Haywood S. Satz, Ronald L. Beard, andG. Paul Landis . . . . . . ................ 303
Preliminary Experimental Performance Of The TOPEX GlobalPositioning System Demonstration Receiver (GPSDR),
Lance Carson ..... . ................. 323
Design and Performance For The GPS Receiver Unit (GPSRU) For TheNASA Orbital Maneuvering Vehicle,
Roger M. Weninger and Richard Sfeir . . . . . . . . . . . 333
Applications Of GPS To Space-Based Tethered Array Radar,Horst Salzwedel, Ken Kessler, and Fred Karkalik .... .... 343
Special Purpose Inexpensive Satellite (SPINSAT) GPS Receiver,Roger M. Weninger, Richard Sfeir, and Ronald L. Beard . . . . . 363
The Defense Mapping Agency's Operational GPS Orbit ProcessingSystem,
James A. Slater . ...... . ............... 371
A Shuttle Experiment To Demonstrate 6-Degree-Of-FreedomNavigation With GPS,
Duncan B. Cox, Steven Gardner, and Neal Carlson . ... .... 415
Large Space Structure Displacement Sensing Using Advanced GPSTechnology,
Gaylord K. Huth . . . . . . . . . . . . . . . . . . 437
Alternatives to Becoming an "Authorized User",Thomas Yunck. . . . . . . . . . . ...... .. 445
List of Attendees and Addresses . . ... .......... 453
iv

AUTONOMOUS INTEGRATED GPS/INS NAVIGATION FILTER FOR ADVANCEDSPACECRAFT APPLICATIONS
Triveni N. Upadhyay, George J. Priovolos, Harley Rhodehamel
MAYFLOWER COMMUNICATIONS CO., Reading, MA
and
A. Wayne DeatonNASA MARSHALL SPACE FLIGHT CENTER
The paper summarizes the results of a recently completedfeasibility study on GPS-based techniques for navigation andattitude update. The motivation for autonomous navigation,and some results for both low-earth and high altitude usersare provided. The need for autonomy will grow in the futureas missions require faster decision making, continuouscoverage and increased survivability. The GPS/INSintegrated navigation system offers one solution withincreased accuracy and mission flexibility compared toconventional systems.
Three GPS-based attitude determination techniques wereanalyzed for providing improved total navigation solution.The autonomous integrated navigation filter will use acombination of these techniques, depending on the spacecraftmission phase, to provide the best solution and flexibilityin mission planning. The reconfigurability of theintegrated navigation filter, in real-time, to adapt to thespacecraft mission phases is also discussed. A knowledge-based navigation filter manager (i.e., expert system) isdiscussed which will be designed to automatically select thenavigation filter states and filter modes depending on themission phase and available resources, e.g., thrust versuscoast phase, one GPS antenna versus multiple GPS antennae,translation versus rotational dynamics, gyro failure versusaccelerometer failure.
The integrated navigation filter results presented in thispaper correspond to a 17-state Kalman filter which wasimplemented in its U-D factor formulation for improvednumerical stability. Two spacecraft applications: (1) low-earth orbit users (e.g., OMV, Space Station, Shuttle-C) and(2) high altitude users (e.g., NASA GEO platform, Lunar-return and Mars-return transfer vehicles) are analyzed andnumerical simulation results are presented for these cases.The LEO user simulated for performance evaluation consistedof an OMV high-thrust trajectory burn of approximately 300
2 It

two antennas and to IMUs. We looked at two cases, one whereGPS was available prior to a burn phase (good initialconditions) and one where GPS was not available (poorinitial conditions). Details are presented for the secondcase.
The simulation results indicate the excellent performance ofthe filter even for the case of poor initial conditions.This test case assumed that the OMV did not use GPS duringthe coast phase and a large position and velocity error hadaccumulated prior to the start of the burn. The applicationof the integrated GPS/INS navigation filter allowed thelarge initial condition errors to be reduced in a short-timeand resulted in excellent position, velocity and attitudeestimation solution accuracy.
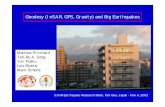
The application of the integrated navigation filter for ahigh altitude user consisted of a spacecraft at GEOaltitude. Since the GPS availability is limited ataltitudes higher than 10,000 nmi (the GPS satellite antennaeare pointed towards the earth), the availability of a highgain antenna and a rubidium clock onboard the spacecraft wasassumed for this analysis. The simulation results for a GEOSTV user, with the above assumptions, were obtained. Theseresults further support the utility of GPS for high altitudespacecraft missions. It is believed that for these missionsGPS may be the sole provider of the required navigationaccuracies.
The application of autonomous integrated GPS/INS systemtechnology is shown in this paper to provide excellent totalnavigation performance, flexibility in contingency missionplanning, and may help eliminate attitude update sensorswhich will reduce the cost and size, power and weight for awide class of spacecraft missions.
A successful application of GPS tracking of advancedspacecraft will alleviate the requirement for groundtracking (or TDRSS tracking), and the real-time onboardreconfigurability feature of the integrated navigationfilter will reduce the cost of mission planning and willsupport the NASA requirement of developing advanced fault-tolerant spacecraft missions.

w Z-
00
* z0o
>1 (wI
00
-0 0
0, 0
0 00w0I- 0
,2 447

ECOC
C E 0
wD CL 0
4-0
oO w00
- ) cc~ >c
~~0
COC
> .0
~m 0 U.. .Cl
U CD0. E o - - '0*
0 2 u ~ (U- c o 0 m 0)
0( 0U w- 4z N1) 0 ~c 0)n M
0 CD 00 b.()- Z-11
c 0~ b. >. )OLM > C4) L 4 0 C l 0r m
zl 0 CCC

uwu00t 0 N 4H
* W
z m0 4-)-.. U0. *r-I 0 OD 0 H
-N. H$.Iw0~ M <E-4 HH00
00
ta U ~ M0m (a U) N0
U E- H0 \~
z 0 0 M H 9 ~() r. 0. 4.) %
0) 0- O )
(fl 0 WU
m0 LLJ rq o
Ch m.
w- >41 rq IC I.
0'" En) 0 01
0 > uE-4 u) 4Ml U) H
D 2 w 0 ZUouH- H =

0
0
h.U)
C.U) 0
-LI (1) 00.C (
z 0) CD cc0 .2 c(0E C (0
E 0.
m C C 0>
c4 w 0 m0 0 02
zc E
0 4 0 0 aa
C'o I E E0~0.. 4" 0
CL 0 0
0j a- a-0 0
0)00 E~0
U.1~
00~ C i0
4-0o EI 00CL > 2 ( 0 0z ba 02 E
0 laa
t- 0 l a 0
00 C I-E
0.C

CMIc r_
0 w 0
cc C
0 C.j 2i 0
-0
-0
-@ 0 0zC 0
0h 0
Z0 Eo ~ 0
CnC
zn 0 >0
0 ~
w ~ 0 E. .
(00251

0 0 zcm <
LUz LU
)- 0 <Z0=
U U CI> C L
ULJ 0z CL
LU t
0 x >.
a: I
o coz0 > L
z 2 - 0_
WLLU0L 0
U) <
0 N Z
0n <. w Z < LU L0
0- o £a00 Ec~ >>0 -- -> L
0 4: <0<z ZZ i LU 7110 ~
F-~ LL;Q~
L~ ~ ~ -- - -0 ' <
z jL1 .
m z
00
2c2 00 z

F- 0
z 0 Lo0 0
+0 >)
C ~ 0
> E
EZ a) E C
CM ' D
~CfL o
cm 0
U 0(Mz U) I)
Z 0
0 co) 0~ >o..CU >- 'w~'*
z r. C/) 0 EU) CM ~ C 00
D - cu o < .L a ) C L
W) 0 (1)
253

'-U
z
-E
z - Eco
N 00 0 NVI
"0 Er%
LUU
w~ m.
D ww0 t C
C =
z 01 a)
0 0. m0) = -Z. 010 "
o/ N => 0) :Nc )LU
254

CC
E J ca
15

4-0
a)
II- b- 00L.
zMm0 0 .
z. 0
0 4.'
0.0a) 0 0
Z 0 WO C
.Z 00
E. 0 .0rl L0oi .n 0 .0
0.Cl) ,-F a* 0.
0: 0 E )
0 c 0%Ll~
Z CL
0l 4. 0 (000
00 0 00000 0
Am CC L0 . *
0X~ .o 0 .

U)
0
Ucc
0 c0
00
m5250

wU
0
z -Z _jL
5: m z _LU u~ 0 z
2 z U-) cc 0elm w 0
-i Z LLUx LLJ LUJ 0
I- N 0cc-
CC L
cc LU CW 0 CL LUJ
LI IL 0 L/)
>) V) = zD 0. P-4 r 0
oU. CC,-0U x
0 - .J
0- 0D-
m-
0291 21 9 bi 0tS3.1II1USB SdO 319ISIA AD Y39wflN ___
258

w
z.0 z 0 0D
ED J
Z _j
z M zLJL X
C) LU 5 C) LZz ED LI U-) CC C)
6-4 -1 z L
LuZ LUCU EDU Cr
< >-
w 0-4 C) (L -L1-4 cc
cr) CL
- L (
zL z U
D 1-4 CNj ED
0 %-
z LL u0 z
0 C-4 -
LUJ
S Ti1 0NOISIJ3Yd JO NgliflhlONA~iW030
259

AUTONOMOUS INTEGRATED GPS/INS NAVIGATION FILTER
U,
c-
'0.00 55.00 110.00 185.00 220.00 275.00 330.00T I ME (SEC)
z08
0
1 4 .00 55. 00 110.00 185.00 200 7.0 300
0. 0 5.00 1100 1 I220 n. 00 27500 330.00cT IMHE (SECI
26

AUTONOMOUS INTEGRATED GPS/INS NAVIGATION FILTER
-0
0
cn
C
59
90.00 55.00 110.00 155.00 220.00 27S.00 330.00T I HE (SEC)
'J9
9
90.00 55.00 110.00 155.00 220.00 275.00 330. 00T I ME (SEC)
0
ccC?
CO 00 55.00 110.00 155.00 220.00 275.00 330. 00T I ME (SEC)
261

AUTONOMOUS INTEGRATED GPS/INS NAVIGATION FILTER
t
100 50 1.0 1S00 200 7.0 300
Ii
0.00 55.00 110.00 165.00 220.00 275.00 330.00T IMHE (SEC)
Ln
Uw 100 650 2.0 27.0 300
T IM (EC
-26

I-rn 0
z AS (
0 N 0
CLC0 4)4- 4
z 0 0 0Ch) II Uz CIL b.z4 -4 W
-i 0 0
0 I- 0n
00
0 ~ L4
o o ENc
(n 00 0
E5 0 Ew 6.
w "- 0 40- < U. 01 - *
N Cm .2 4) m 20C,) Z5: -0 4) > 0
o IL ca C -E LC
ze >) z.ooC 0 (5( ~ .I- ~ ~ .(n *YO0

z
z
WI N1UD UNGMJW ArZIM &M
0 w+I-,
z0
*r_
71P -t
o9p **1m DU OO ~II

AUTONOMOUS INTEGRATED GPS/INS NAVIGATION FILTER
GPS Satellite Visibility for the STV
@7F
0 20 go 8 to ~20 I w too
TIME CHINa at&A
TRM EI IIIIYT TEMaY2 P M11E
GU YCFM&1M MIWam .FSaMO
* 265

AUTONOMOUS INTEGRATED GPS/INS NAVIGATION FILTER-41
C,
zno-
on 0
-4
0
Uon
'0.00 24.00 45.00 72.00 9f. 00 120.00 144.00TIME (MINI .10
z
an
cc
0. 0 0 24.00 48.00 72.00 9.0 1200 1.0T TIMNE (MINI MID
.2f;f

AUTONOMOUS INTEGRATED GPS/INS NAVIGATION FILTER
P0
200 1110
0
-
Z-:
?.w 214.00 48.00 72.00 9.0 1200 1.0T I NE CHIN) *10
0
uI-.
0C;
-
_j
ccu
C0w4
24.00~. '..0 72W f 120.00 1 IA. 00TIM14E CHIN) .10
267

0
b.4.'
. -- 0. 0
~~0 0. ~.
a: 00 m
CL -0( ( 0 E E0Cl) ~ ~ ~ 4 o U ~ ****
0.0 C;w ci -S2%4 4
0.0. CL* 0
EE~~~ 4 000
o-O t h-0
m- > 00 0
D> 04- *0 m 0 r&
zz E 000 0 ) (UCOO
C).c, C .0 > W 0 i -0
o C( .2 cn ci U 4 2)
0 wo. cU0
-r

wr
C
o0)
G2E
z C CL4
zn C..0 EO
a... 0 00' 2o C
-J C La
r
W
0-0 00
0'-

270

AN EXPERIMENT IN ATTITUDE, POSITION AND VELOCITY DETERMINATIONWITH ROGUE GPS RECEIVERS
Tom K. MeehanJET PROPULSION LABORATORY
An experiment was performed on an aircraft to investigate the attitude deter-mination capability of GPS. This was done in anticipation of an applicationon EOS, to be launched in 1996, which will have three antennas as shown and aGPS receiver similar to the JPL Rogue receiver with 1 cm accuracy for pseudo-range and submillimeter for carrier phase. The goal with EOS is to get real-time attitude determination of about 0.1 mrad, real-time position error ofabout 1 m, and post-processing errors of 0.03 mrad and a few centimeters,respectively.
Another objective of the aircraft experiment was to prove the concept of usingRogue GPS receivers to calibrate SAR (Synthetic Aperture Radar) measurementsto obtain ocean current velocities. Two SAR antennas on the bottom of theaircraft fuselage are side looking (450), one transmits, both receive. Fromthe interferometric recombination of the two received signals one can deter-mined the ocean wave propagation (i.e., current velocity). One significanterror source is yaw and pitch in the aircraft; e.g., an error of 0.010 in yawyields an error of 4 cm/s in current velocity versus a requirement of about0.6 cm/s.
GPS was used to demonstrate the potential for controlling these errors - theinitial goal was to achieve an accuracy of 0.10 in pitch and yaw. Two anten-nas were mounted on a DC-8 and two Rogue GPS receivers were used (8 satel-lites, Li, L2 carrier phases, P1, P2 codes, 1 s data rate). A twenty-minutesegment in which 4 satellites were simultaneously visible by both antennas wasextracted from the test flight. The first graph shows the heading of theaircraft as determined from the velocity which was obtained by differencingGPS position information. The second graph shows the difference between head-ing and azimuth and reveals the 3* bias due to the second GPS antenna notbeing on the center line of the aircraft and a drift due to change in windvelocity (pilot had to introduce yaw). Most of the detailed features of thisplot are real (not noise) and due to aircraft maneuvers.
The results were better than our goals for pitch and yaw. The largest errorsource precluding the achievement of SAR requirements is multipath. Arepositioning of the rear antenna would improve this as would the availabilityof more GPS satellites.
271

0
.EE0Cc
C4
n0
0
272

> Cc
UI-0
00mm '0
0 0EC0 0
a0C E
0 CL 0
U) co E
L C0.Mo
00
E E
273

c
0)0
40 c
ciu0))CC
0)0
aa.
0c
mJ
274

co
0
m 0
E 0 -0 Ea) a
0
0E
cc cr n 0aa
E EE0
CO@L
0 0
.. 0a c275

____ ____ ____FLIGHT PATH05-23-88
Parktleld
DSN atGoldstone
NASA./JPL
r
0

FIGURE I AZIMUTH OF ACRAFT VELOCITY
A C4
0 250 75510010 10
Time Relative to Start at 85-145 02.0:40 (Secondt)
FIGURE~27 2 -STO AEJCAIUhFO ARF EON.L

0
U)U
*-p 11
oC) 0 00' 00-C ) 0CY) 0 0 0 CY) 0
0
aEo0 o o cm 0
E <:2 vov:0 6 C)60 0 C
LM a)C!C0 0 5)3
v 0 v C) 0 -
C/,Ecn ' a)z -a) Clzo
0. - -
wL- o9 MEcLia-41 a c7M 0C LwEc
278

0 &M
z) W>9
cc
(UCL
271%

2b3O

PRELIMINARY GPS POINTING DATA RESULTS
BY
PHIL WARD
SENIOR MEMBER TECHNICAL STAFFTEXAS INSTRUMENTS INCORPORATED
6600 CHASE OAKS BOULEVARDP.O. BOX 869305 MS 8449
PLANO. TEXAS 75086(214) 575-3824
2S1

PRELIMINARY GPS POINTING DATA RESULTSABSTRACT
GPS attitude measurement promises to become a cost effectivesource of precise alignment and calibration for Inertial systemson space platforms whose orbits are within GPS coverage such aslow earth orbit satellites, the Space Shuttle and the SpaceStation. GPS has already proven itself to be effective fordetermining an ultra precise vector between two GPS antennas forfirst order geodetic surveying using carrier doppler phaseinterferometry techniques. The same principles can be applied toobtain two orthogonal pointing vectors to provide attitudedetermination. Two advantages of GPS pointing over geodeticsurveying are that the antenna phase center separation (theabsolute value of the unknown vector) is known a priori and theantennas are one to ten meters apart rather than thousands ofmeters. The known antenna separation can be used to speed up thesolution of the phase ambiguity problem while the close proximityof the antennas ensures negligible differential atmospheric delayerror. permits the differential multipath error to be smaller anda sinqle dual port GPS receiver can be used to obtain both sets ofobservables.
This paper describes some preliminary field test pointing datataken with a Texas Instruments Incorporated (TI) GPS Receiverwhich has been slightly modified for this experiment. Thereceiver Is the new AN/PSN-9 5-Channel, C/A-Code, 10 pound,portable manpack/vehicular (MP/V) receiver now under productioncontract to the U.S. Air Force Joint Program Office. At the heartof the AN/PSN-9 Is a receiver channel-on-a-chip design whichembodies a TI Invention specifically desiqned to obtain pointingobservables from two GPS antennas, but requiring only one GPSreceiver: a 5-Channel, two port per channel design. A tripodmounted beam with one meter antenna separation was used to obtainpointing data from real GPS satellites while continuing tonavigate In the normal manner with respect to the referenceantenna. TI has also invented a technique which resolves thephase ambiguity problem without external aiding within a fewseconds under dynamic conditions rather than the half hour or moretypically required for stationary geodetic observations. A rapidconverqence example is presented. Single difference and doubledifference raw data from real GPS satellites are illustrated aswell as the pointing results determined from these observations(azimuth and elevation) which verify that the invention actuallyworks. The Initial field data taken with 1 meter antennaseparation indicate that an azimuth accuracy of 0.5 milliradianwill be obtained with 1 meter antenna separation with no specialantenna phase matching, calibration or smoothing of the raw data.Owing to the nature of the TI invention, the noise contributionwithin the receiver Is essentially thermal noise. The majorsources of pointing error are expected to be differentialmultipath and differential antenna phase center migration, butfurther experimentation will be required to characterize allsources of error and to determine what is the limit to which thesesources of error can be reduced. A "truth" pointing reference iscurrently under construction and phase matched antennas will beused In future tests. These results will be reported in a secondpaper at the IEEE PLANS '90 in Las Vegas, Nevada, March 20 to 23,1990. 2S2

U) 0
w
H z
o z
z w
H Z 0
00
CO
z H L 00.
C,,w Q)a:w CO)X a z
CLw ::Z a:
cc H
m . LL CO)
283

j w-IH
0
(N
aa
itl
284

r~En'a.L
'U C p . o~ a w 'm ' .in C>- o. 0- JC* 2L
.2 V u z " t- w0)
WAP E C3 4LUI.-4Z ' CD = o
CD~~~4 CD0-- S - )w =W4 CL~ W2 u -
= -0% U ui <U a. 00 Cc
Uz =
cn. U. LU CD LLCWu w Eu Cm
Z C P < cc -- - 6
W~~~ ~ ~ ~ uj"S~uWAc ~4 - t t
-J 4L. 0 cc= .
cc If) 'D 14ca~ > CLU = ~ ~ Cl D .L.31C -W I- $. u C Cj z 1=3 b - VK) :- w ) u T 0
lf LL M
0*, OS
C3eAI
2~C?

IW 0u -4~ y
.bl
II
Yr.0

, A
287

1J.2.f
71. 1
P, Mo~'
I"l
V lab
*ARC

w W- --
0
Z o0 0>
1- 0- L:3- C
z0~ z jn _i 0
H i w _cw
ZWH wZ F-/)~ a-c _W W a:
_j- z cc
LLi >< W 0 ww 0W (WCOZ > ZO H
occ«c 0JHW 000 JL - W c
F- 0~W0 0z H -cF- CO)< m , CCW)0F-Z W COWU.
coZ Wu f- w cO
0 ) 0 W C0 0< W 0 0CDJ WH-.<2 Z 0 J
w (.)LL- W <D COz C)2 00cc z_) cc~Z z < 0 z - w
.CO ~w OCO 0 ccc -( Fc z -J l)c
450 4 L '-
Ho 2c~ 0 c 0> <
Occ w CL z cr
w PL
0 0 0 0O 0
289

Z LL (9 I= :0 L -j
o. <LJ Z 0a H W w
H 2 cr I--o 0
0 0c1-- 0
Z Dz CCz0 cJ 00H
0 ow0 c w -iZ <D1 L>
o z C) LLJ0
z >oZrria 0
RO cw0W W F- wZ
F-Z 0.cc0 wmZ Z H
HOJ w wc .LccF . I - LI z
0o w - 0
a > D Lu Cr -j2a0

LO
.0 0-i LO
c( 9,za
0* r0
VD0 r- V
(D0 Q 00j
0)
CC
S8313N4 NI 3SVHd .10
291

000
0)000n
Li)0)o U)01 <
co
uu1-to on
LLJ
z(I)
z0
C4. 0 40 -. 0 u') in *4 CM CO r 40 in * rn C4 0 0n
SN313ri '3NN3-UIa 310NIS
292

(0
000
I0
0
LL.
0) 01 (LLLJ If)
z(f) 0
S8313I '30N3N3-1-1C) 31IN0
293

0
U)
G-)O
a)O:4-
z0
IL
00
> 0~~
0 0
N
')
a oq
z
(0
0-(1 0 - f0 in r) 0N
S833HN 3ON3 I3±II31 fl00
294

(0
cra'000
G)
0)L.4.-i~00
z OMVZ
LLJF P~
>00
0)0
oz 0000000000i
S3IO3 03ON
a.295

T1420 CPU - PARKING LOT 7/21/89AZEL SOLUTIlON FROM MOTION
20 -
01
0o -16-7-6-
-20 -
-25-
0 2 468
IME. SECONDSa PHASE SV 13-6 + AZ 0 EL
V4'r 0 A.d7X-rj IA/ Z39)
2 9 V

TI420 GPU - PARKING LOT 7/21/89PHASE SV 9/11
0.42-
0.41 -
0.4-
0.39
0.38
2 0.37-
S 0.36 -
zw 0.35-h.b. 0.34-
w 0.33.J
0.32
0.31 -
0.3-
0.29-
0-28-
0 200 400 600
TIME IN SECONDS
T1420 GPU - PARKING LOT 7/21/89SPECTRUM: PHASE SV 9/11
0,2
0.19
0.18N 0.17-
N. 0.16-0.15 -
0.14-
0.130.12
dFA 0.11. 0.1
0.09
0.08-
0.07-
0.06-
0.06
0.04
0.03
0.020.01 -
0
0 0.02 0.04 0.06 0.08 0.1
FREQUENCY, HZ
297

T1420 GPU - PARKING LOT 7/21/89PHASE - UNEAR RAMP S 9/11
0.01
0.009-
0.008-
0.007 -
U 0.006-
0.005
S 0.004
ti 0.003-Z 0.002 -hiahi 0.001 -IA.a 0
Wi -0.001.Jm
-0.002
-0.003
-0.004
-0.005
-0.006
-0.0070 200 400 600
TIME IN SECONDS
T1420 GPU - PARKING LOT 7/21/89SPECTRUM PHASE - UNEAR RAMP: SV 9/11
10 -
9 ~&AA rN
"t
7-
po w PtE 7-Pr~e,. Unbe.S1 -Y~6 A-6 4-VE b-OU16L4 J)/PFr tSC
4
Ii 3-
12
0 0.2 0.4
FREQUENCY, HZI
298

C14
........................ ...................... ..
...... ...... ..... ...... ...... ..... ...... .....
p.............. ... .... .... .... .... .... .... ... .... .... . .. .... .... .... ... .... .... .... .... .... ..
...........- ........
.............
.. .. .. .. .
.... .... .... .... .. . .... ...
............. IIIdIItIII 0
--- >~ ......__-
.. .. .. .. .. .. .. .. .. . r .
............... I '.
Q _l -i i ii- . .... .. .-. .......- - _ - ' i -
NI~=1 3SJd 3J0
C)L_ .......2..

...........
.............. ............
J i l ......IV
coo- ...........
........... ~fill,.,., .- ..... 4:
.....................
- ..........
..................... .................
........ 1C.- W -
=I CI
SLiL3CA- ............ 3...

()Q z z CO) ccCl) Cl) D WLZ- I--w 0 I
W W F- CA Z_ co Er < W
Wr 0 < D W
gcJ CL c
0-_ w z l
z w
z <-<H < cc
zZ 0 lo0-* 0 W _
tO WW co- H j0Z cc- HO- D w
<J Qw > <Z_3 0 -ZI 0 (fO. C 0
X. C <C Z-) ca=) Wa -- 0 0F.wl Co >- cr cc -c -- LZH
_ F Co- 8c) c ~ H
w <~ co z -2 )0Za wW< W w- > 0 F H<HW
zo ir 0ZC -zCCD WFcc Cj cc wW a. 0
t o 0. L n < c- OC jOCoZZD _3O«0 H0- Cr Cc 0 Z
Dw w LL ZOW) :
Ho W - C>O Hf Z~O H I~~JJ
HZ << CoHH zc0. w<~ -zLOMLLL P
2 U- 0- w OZ-OzL HWM 7w w Co) ^OLL C.H <
mo u-~ -OHo p OrU. 1 Co) WOW1--
FH W~O cc IHW 0WCO0C - C LL WL
C) 0. ccZW c wC 1COo
*0 0-M
F- c! . Z 301

0 09z z03
wHWSCC Z LL
wc < 0LLa w
0z 0a
cr- zcr z 9(/)
< LL
pw DW
FW 0yC) U) t w
0l Hcc w 0c
cc w
cX <6 HH 0
W LW
0 z
ZU H
z> Q-zz~ _ 0-
0 -Hw
F- z w- W Z
* 0 0
0 CL 302

ALGORITHMS FOR SPACECRAFT ATTITUDE DETERMINATION WITH GPS
Duncan B. Cox and Haywood S. SatzMAYFLOWER COMMUNICATIONS COMPANY, INC.
and
Ronald L. Beard and G, Paul LandisNAVAL RESEARCH LABORATORY
A filter is under development that utilizes GPS data and accelerometer andgyro data, if available, and/or spacecraft models to estimate position, veloc-ity, and attitude, among other variables. The emphasis here is on using GPSdata, in particular, the accumulated carrier phase, not only for attitudedetermination but also for navigation. The difference between the accumulatedphase data and the delta phase measurements is that in many conventional fil-ters that treat delta phase, the time intervals spanning the delta phase donot cover the entire time history and data are lost. The filter design has anadditional goal of fault detection and isolation.
The integrated navigation filter, designed for autonomy (real-time solutions),is based on the Kalman filter which processes accumulated phase, pseudorange,delta phase, delta attitude, and delta velocity. In the accumulated phasemodel, the initial unknown constant is treated as a state in the filter (thisyields many states representing measurements of different satellites at dif-ferent antennas).
The simulation results are based on observations to four GPS satellites usingthree antennas (12 simultaneous measurements) with a 6 s data rate. Onlyaccumulated phase measurements are used and initial position and clock errorsare assumed to be 15 m; while initial velocity is assumed to be known to 1 m/sand orientation error is 0.1 rad. In this case the vehicle is not rotated andambiguities (individual and differential) are not known. Note, however, thateven position is being estimated since information is coming from the changinggravity gradient as the satellite orbits in space. Velocity is determinedafter two samples because the constants are assumed to be really constant andthe accumulated phase at two points yields the velocity directly. Attitude isnot determined at all because there is no rotation. Rotation of the space-craft supplies information on the ambiguity constants and attitude can bedetermined. Knowledge of the ambiguity constants now provides consistencychecks of the data (detection of cycle slips).
In conclusion, the general concept for an integrated navigation filter hasbeen developed with the unique additional feature of accommodating accumulatedphase measurements. Using the accumulated phase to determine attitude andperform navigation is believed to be superior to using delta phase. However,more study and simulation analyses are required.
303

b0co 0
co 0
U 0 0
o Soz
0l
00
0 0)
304

C/)
cv,4.) 4.
C12 0
oc
Cd)~Q 00)&
coC CC)
;.4 c
CI) CC ~ 4-4-4
~4-4-4- z
Q)C2CC)z$
I ~ 0 ~.~*~305

zz0 C0
00
0
0.4 04~
C_ 0
a.).
1.4~
0. ;l.)00
306

C,,
CCID
C)r
30

a) C.
~Sco
LF
a 4-4
Cl) Q
308~

Cf20
00 U)
0
H
0
'Ij/ ,
It / I- j/
/ I
/ I/ I
/ 5
IICH I1r, ~
H
S0
* U) Q
I-
3O~i

o Oc
VV
0 P. 0
P--
V) 0 0
o Co Cc
0 0C4I)
\JJ ~ n
QU .,.4 (z
COC Lo 0U~ ~ 4
4 - V0C V ) V)0 .
*/ 0 00)I . C
310

(121
CCOD
V P.
~~0 0
00- V4
.00.4 0-
0- - ~4-
4&..) 0P-
- $-4*,
co -
00 00
311

0 5 cc
z z 0
0 0
=j aw Z- z
w w 0 4 x LiI0 m. CL
z. -
0U <
F-
C/) Cl)0
LU D00 LUI E
LL~ _ 0
LLJ Z
0>
312

0 0
i-a: 0
a) 0
COD
0.
4-
tR4 - j
T 00)0
0L 0-
Z O)(DwU
2 T-z< <- COC0L 0o-m -a CO
00 E9 LUD~ D :c
Go(-) J -j<C) O)W *0 040. 0 c0
L U -) c
0 w
7 E_U 0
CIDCD
LU Wr
0 0
z
313

00
00
H 02
U)
00
U2U)pco
pa -" - 0 ;
zz ino ccPC4.? 4-2
.p 04 * C< 0 L . 4 ()5 P
.- .--6 -OE-
-- C) F
P.4 P*
4-4 .d -od .. 4-4
C/D - ) o
314

Q (0
a) c
00
CLl)
Q), 4-4
0~ Cl)
V 4-4CL) ul ?
v 'Mm -I
0)-4.4-m
CCO
0 ;0
31

0In InA w Hi
0H
W "a >1
4a 0to) a
cm - 0 p
E- P:
00,01- 000 o0o-bi 0011 00 1-F01Tk . -I Id -0 6 U iW 1 d £ 01 Oj LA nel td ' A igHA 11SC-141d :0ge
z0 0
z -402M In n In in
0 L,
HJ u
b-i -U U
CI or 41 001 OV) 001 00000, -V N fI a ll 09abAX !1 - .8W Er1 ' 08
9U -'Ur
trc L:u UL LL . .0
oLS001 o?1 Ot*O 00*oo
DO TI8T0 £V Li DOI-4z tA7C911 ,c mTSC771 0C9WAn-011
a a1t a

(CID
4.4w
Q -QC)5
CI))
uZH\coHu
000
p~co
co0)
CO)
4-
0 0*1E--4 -!! 0- 4 ) D
00
317

0 00
in n 0 n in1.14
.I*41 VN~* ~ ~
on o? 0 0 001 00 1 olC
0 0 0 0
z 0 0 nA 000
a) L
NUUr U A0 0 u LU
00 l o0* 01 F OI I 0 1 CI
tnA j MCju v L', ULU~ - oi-o ~ -0-o
-~r 000 4.' I o 1-0, 00?W e cMrT41d
:K 1 6 AM-4daE6UACE74I - h U
z 4- 4 4318

-ICID
V)
0 C\2
4-
4--4 Q) 2
Co)
64 o4
--
P-4 V ) I) .. 24o1 L) 0l
LU$
V)Q0(2)5-
-~ ~ 319

0 0 0
in an W NL0
u c)
0 V N Cen m 0~ 0
4' E! - 0. -
41 cli W E LU Nw cu - CJ
->4
zz
<0
00 01- oO 0OTZ 00*1 001- 00l1 00*0~in~ FTId a9 6 Wd ss6-1d v9 01' tA SSCTIld a IT- VdA Se-I 4i 7 91' WA
00
UU
aw V 0
U 0l 002.- Ni EL. 00 .
< 4) C I
E- X:Cz
Oo -. 001 Nl 000 C-U-141 cxQ SU -d cCCJwj :09HA .lldZ W
-n 4)- - ' - I.) 4 0
- - 4ow -4'
o) v0 0 >
001- 00 001- 0'Ot 00L-71otool
-- 0 ~ p 147 -0P 0M P'-4d4
32

1Z
co
0-4 ;0
0 0D
U ) cn
LZ
02
0 P02
0 b0
u C.)
Q) 0b 00
0 C 02 F" P
W0 o o2 p"2UC) -04 0 0
C) C.) 00- () 0L)
01 -4- ot 0,
321

322

Preliminary Experimental Performance of the TOPEX Global PositioningSystem Demonstration Receiver (GPSDR)
Lance CarsonMOTOROLA GOVERNMENT ELECTRONICS GROUP
This paper summarizes the basic requirements of the TOPEX Demonstration Recei-ver, overviews its architecture, reviews the measurement techniques, and of-fers some preliminary results. The TOPEX receiver is a fully space-qualifiedreceiver designed and built from the ground up. The key requirements imposedby JPL for the TOPEX receiver include continuity in measurements of Li and L2carrier phase simultaneously on 6 channels; autonomous selection of GPS satel-lites that are optimum for TOPEX; high accuracy in time, carrier phase, andpseudorange, and low interchannel bias; and the ability to use an existingexternal frequency reference. The architecture of the receiver implements adouble conversion for Li and L2 with the local oscillator as common referenceboth for maximum symmetry and delay tracking, and samples are digitized at 40MHz rate. Channel-on-a-chip technology is used (6 chips for each frequency) -one difference in the TOPEX chip architecture is that measurements are inte-grated to the 20 msec level allowing the processor to accommodate many otherfunctions, such as navigation and interface software.
The program status shows that hardware and software design are completed andthat the engineering model hardware has been built. Hardware/software inte-gration is in progress and the two flight receivers for TOPEX are ready to beassembled.
The technique used to measure the random error of carrier phase and pseudo-range is based on the difference of two channels that are tracking two differ-ent satellites having the same dynamics (this can be done with a simulator),thus eliminating drift and oscillator errors. The performance of the advanceddevelopment model receiver is close to the predicted value of about 1 mm forthe carrier phase and about 14.7 cm (versus 8 cm predicted) for the pseudo-range. The latter disparity may be due to some residual contribution from thesimulator entering even after the differencing technique is applied. Bytracking just one satellite with all channels yields the interchannel biaseswhich turn out to be less than the noise of the measurements.
Discussion:
Question: Are there any data on the reliability (i.e., MTBF) of the TOPEXreceiver?
Answer: We have some rough numbers based on correlations with similar equip-ment (on the order of 100000 hours).
Question: Are the interchannel biases constants?
Answer: They seem to be more random in this particular case; but ideally withthe digital architecture of the receiver they should be zero. We are stillinvestigating the mechanism for these biases.
Question: Are the chips dedicated to process either Li or L2, or both?
Answer: They are identical but their physical location contrains them toprocess either Li or L2.
323

O.U 0
4 c 0 0u
M LuLLL4U 0
I- u. aLL.W Lu 0 > 0 0
N CICm W > 0 N L
CC Lu
0 Lz IL) R z c
Lu4mU) z II.
ccO J Lu COS
Lu F u z Lu L
LLV 0 LL u 40 Pi 0 Q C
Lu LL . cc CO C J Ucc.LUUCO L 0 a.. 4c
a g 0 0 U) cc m0 -J 0 0U Lu cc0 L5F 0 M
0 to cc 4LU) (Lu 4 -L U)a L
0U) - 4 00 La.001 ) z Minusccm m z 0 cc zL
0 LL. 0c Z 0LuZ LL ccz Z;: 00 0 0cwaMa0Z m di *ku. 4 a.
S 0 0 0 0 0 0 0
324

w0
cr--
_ 0U
I.., X
CCC
- D
-J
3 2'5

LU
0
C',DLUU
00j CL
U) LULU
ocw 0. z40 Z
LU LL.EM I-- 0L 0'u- if ZLU0
0 ~0 wU mU 0L LU 0 w 0.
0) LU
LU nLU 0 4
LU (Ia -LU
0i 0) Z LU1 0L
C. LU0z LZL LUc ot O 0
0 04 n
0 LUZ 0 ~C)Ow cc 0
z OW 0
0 U 0Z 0 0
32(3

CL Q
W Ac
,
Ii _ _
C~) I
- I~ -I -
3Ca-
B.3
0QI-Z
z I-
o z
COC
cnEn
0z
cz
327

LU~ cc 0LU >-
000
z. ulw0 1).0 C 3: x
LU t Ux . RoQ
o0 LL, c
ULwLU W U
cc LUI a ULU -zZ- cc W
CC LL dJz 2L)
0 Iz LU W zLU LU 1
U) 0Cl) ~ r 0L Lz
w~L Z z 0 m
0U W L0 m U. U. Woz
LUQL 9 D0)GLUz U) L LJc
0
0 LU
P 0 0
gal U t) c J e2S

LU
~W c
*c uim
LmJ
LU
o MMzL IL
00x
00N Nzx
X, 0
z
~WW wO0a c- 00
0. D) 0.0.
329

co
0(
0(
LU,
CL co
oc
C4 d
03

(0V)
ImICC
S2
o w0 z
z 0
w
z
00
1:~
331

zui LUCD z
U, 4
0U taz LU cc
cc LUI z04 0CO) CD U
LUz 0oL U LU ULU le WCD L
C,4c LU CLU U) aj
2 LU LA
LU 0.LU
ZO.
IL LU 6JLU %N x L
CD M
0 0 0
332

DESIGN AND PERFORMANCE OF THEGPS RECEIVER UNIT (GPSRU) FOR THENASA ORBITAL MANEUVERING VEHICLE
Roger M. WeningerRichard Sfeir
Satellite & Space Electronics Division.Rockwell InternationalAnaheim, California
ABSTRACT INTRODUCTION
This paper provides a description of the In August 1988 a contract was awarded tospaceborne GPS Receiver Unit (GPSRU) the Satellite and Space Electronicsplanned for installation on NASA's Division of Rockwell International toOrbital Maneuvering Vehicle (OMV). The provide GPS receivers for the Orbitalreceiver's hardware and software imple- Maneuvering Vehicle (OMV). This recei-mentation, and its interfaces with the ver is based on a Miniature GPS ReceiverOMV, will be presented. Simulation (MGR) chipset developed by Rockwellresults demonstrating the receiver's under contract to DARPA (1). This chipperformance will also be reported. A set is shown in Figure 1 and their phys-breadboard unit has been operating at ical parameters are summarized inRockwell since May 1989. The qualifica- Table 1. It consists of a GaAs MMICtion test is planned for August 1991, RF/IF Translator, a Silicon Frequencyand the flight units are scheduled for Synthesizer, a CMOS Signal Processor, adelivery in March 1992. CMOS Multi-Function Interface and an
I - -
.__ __ __*,,.-h.
_ _ _ _ _ I
FREUIENCY IISIGNAL
SYNTHESIZER R/IF MFI AAMP PROCESSOR
Figure 1. Miniature GPS Receiver (MGR) Chip Set
333

Table 1. MGR Chip Set Summary
DEVICE DIMENSIONS IMPLEMENTATION POWERCHIP TYPE COUNT (inches) TECHNOLOGY (mW)
RF/IF Translator 420 0.340 x 0.350 Gallium Arsenide 1500
Signal Processor 19,800 0.185 x 0.220 1.25 Micron Bulk CMOS 90
Multifunction Interface 29,000 0.370 x 0.370 1.6 Micron Bulk CMOS 20(MFI)
Advanced Architecture 74,000 0.250 x 0.261 2 Micron Bulk CMOS 90Microprocessor (AAMP)
Frequency Synthesizer 350 0.165 x 0.165 Bipolar Silicon 500
Advanced Architecture Micro-Processor. b) Use the Ll signal of 1.57542 GHzThis chip set is configured with memory, only.a frequency standard, a power supply,and user interface circuitry to make up c) Input signal power of the Ll C/Athe OMV GPSRU described herein. The signal within the range of -138 dBmreceiver will have two channels capable to -104 dBm.of tracking either C/A or P code, andwill determine position, velocity and d) Achieve navigation accuracy withintime for the OMV. Two receivers will be 10 minutes (90% probability) afterinstalled on the spacecraft, each an initialization accuracy of:operates independently of the other.
time + 1 secondThe OMV prime contractor is TRW and the position + 80 nmiresponsible NASA agency is the Marshall velocity + 600 ft/secSpace Flight Center.
e) Pseudo range error not to exceed 28SPECIFICATION REQUIREMENTS/ feet for C/A-code and 6 feet for
PkEDICTED PERFORMANCE P-code (1 sigma).
The following performance parameters f) Pseudo range-rate error not towere extracted from the OMV GPSRU spe- exceed 0.08 feet/second (I sigma).cification document (2). Actualreceiver performance is expected to be g) Absolute GKT time error of I micro-better than these values. As an example second (1 sigma).the simulated navigation position andvelocity errors summarized in Table 3 h) Navigation position error per axisare better than the specified per- not to exceed 397 feet (3 sigma)formance defined in h) and i). when GDOP = 4.6.
a) Minimum carrier to noise ratio of i) Navigation velocity error per axis33.2 dB-Hz for the C/A signal and not to exceed 1.19 feet/second (330.2 dB-Hz for the P-code signal. sigma) when GDOP = 4.6.
334

j) The receiver shall be capable of allocated a one-second processing inter-correcting the corrupted data val for each satellite, i.e., within oneresulting from Selective Availa- second all of the real-time functionsbility (SA). associated with acquisition, tracking
and navigation are accomplished. At theThe specified (2) system errors for the end of the one second, the two channelsevaluation of navigation performance reacquire and track the next two satel-are shown in Table 2. Using these lites in their respective satelliteerrors in a computer simulation to assignments.predict GPSRU navigation performanceproduced the results shown in Table 3. The receiver can operate on either orThese results show a predicted one- both the Clear Access (C/A) code, or onsigma, spherical position error with Precision Code (P-code) depending uponP-code of 11.7, 11.9 and 12.6 feet for performance requirements. As a generalOMV altitudes of 125, 200 and 1000 rule when estimated position is not wellnautical miles, respectively, known C/A code is used for acquisition
and then handover occurs to the P-code;however, if the estimated position and
FUNCTIONAL DESCRIPTION time error is within +300 P-code chips(±30000 feet), a satellite can be
The two channel GPSRU sequentially acquired with P-code.tracks a selected group of GPS satel-lites. The channels function independ- A functional configuration of the GPSRUently so that data from two satellites is shown in the flow diagram of Figure 2can be processed in parallel. During which is designed to show the signal/normal tracking, the two channels are data flow from the antenna input to the
Table 2. GPS System Error Assignment
PSEUDO RANGE ERROR
1-SIGMA (ft)
ERROR SOURCE P-CODE C/A CODE
Space Segment:
Clock and Navigation Sub-system Stability 9.8 9.8Prediction of Satellite Perturbation 3.3 3.3Other 1.6 1.6
Control Segment:
Ephemeris Prediction Model Implementation 13.8 13.8Other 3.0 3.0
Tropospheric Delay Compensation 0 0Multipath 3.9 3.9Other 1.6 1.6Receiver Noise and Resolution 6.0 28.0Ionospheric Delay Compensation 17.0 17.0
RSS 25.5 37.4
33J

Table 3. Predicted Navigation Performance
PROBABILITY ERROREXCEEDS 3a LIMITS
ALT. NO. la POSITION la VELOCITY 10OF OF ERROR (ft) ERROR (ft/sec) POSTIION VELOCITY CLOCK
OMV GPS CODE ....- ERROR
(nmi) SATS TYPE X Y Z X Y Z X Y Z X Y Z (ns)
125 21 P 6.5 7.0 6.8 0.040 0.046 0.045 0 0 0 0 0 0 5.0
125 21 C/A 7.9 8.6 9.1 0.039 0.043 0.042 0 0 0 0 0 0 5.8
200 21 P 6.3 7.9 6.3 0.039 0.044 0.042 0 0 0 0 0 0 4.9
200 21 C/A 7.1 8.9 7.5 0.039 0.046 0.043 0 0 0 0 0 0 5.6
1000 21 P 7.1 7.5 6.7 0.039 0.045 0.048 0 0 0 0 0 0 5.2
1000 21 C/A 8.5 9.0 9.1 0.044 0.052 0.045 0 0 0 0 0 0 5.5
data output to the host vehicle. The amplifier is gain controlled over aflow diagram also shows the functional range of 30 dB. These stages are usedpartitioning of receiver elements among for Automatic Gain Control (AGC).RF and digital hardware, and softwareprocessing. The 1.27875 MHz I&Q AGC output signals
are converted to digital signals in A/DRF PROCESSING converters. The A/D conversion process
is accomplished using a null zone limi-The incoming L1 signal is routed ter which provides a +1, 0, or -1 outputthrough an overload protection limiter as a function of input signal amplitude.with broadband low signal linearity and The null zone limiter was chosen over a
a low noise amplifier which is followed binary hard limiter since it maintainsby a band limiting filter. The signal the signal processing simplicity whileis then down-converted to an IF of providing superior performance. It173.91 MHz by the injection of 1401.51 should be noted that the finite quanti-MHz signal to the first mixer. The down zation of the A to D converter will beconverted signal is further filtered reflected in a processing loss ratherand amplified through an IF bandpass than a measurement error or bias. The Ifilter and an IF amplifier. The IF and Q quantized signals are fed to a
signal is then fed to an inphase and a pair of CMOS drivers to drive the sig-quadrature mixer to generate the I and nal processing functions.
Q signals. The I and Q mixer localoscillator frequency is obtained bydividing the 1401.51 MHz signal by 8, SIGNAL PRCESSINGyielding a frequency of 175.18875 MHz.The resultant I and Q mixer outputs are The major functions performed by signalvideo signals at a frequency of 1.27875 processing are carrier demodulation andMHz. Each of the I and Q signals are C/A or P-code removal. As illustratedfollowed by a low pass filter and a in Figure 2, each of the two receiverwideband video amplifier. The video channels has its own signal processor
336

SINA PROCESS ING
I F
INPUTCM~ LIITRMMC I AP MWR A I
WO CNG BYWOA AI
0C BY2 YTHS.E
S emCLock
Figue 2 GPSU FnctinalFlowDiram
337KJNC

chip. Each signal processor synchro- data demodulation as well. Internallynous' samples the incoming I and Q the channel processing function acceptssig, cs at twice the P-code rate (20.46 signal samples at a I kHz rate from theMHz) and inputs them to the carrier and signal processor and provides back com-code tracking function. mands at a 50 Hz rate. The channel
processing function also provides theThe sampled I and Q signal is a 1.27875 pseudo-range measurement from the codeMHz carrier shifted by any doppler fre- loop, the delta pseudo-range measurementquency and quadrature phase modulated from the carrier loop, and the carrierby the 1.023 MHz C/A code modulo-two power to noise spectral density ratiosummed with the 50 Hz navigation data, (C/No ) estimate. It interfaces to theand in-phase modulated by the 10.23 MHz navigation and interface processingP-code also modulo-two summed with the functions at a 1 Hz rate, providing50 Hz data. The I and Q samples are channel measurements and status, down-input to a digital phase rotator driven link subframe data (when required), andby the carrier VCO output. The phase accepting channel command data.rotator, acting as a single sidebandmixer, translates the signal to base- NAVIGATIONband by removing the carrier and itsdoppler frequency leaving the sampled The navigation function accepts pseudo-C/A code, P-code, and data. range and delta pseudorange measure-
ments, combines them with the corres-The signal is then passed to code ponding GPS satellite position, velo-removal logic which correlates the city, and acceleration in Earth-selected 'code (C/A or P-code)*from the Centered-Inertial (ECI) coordinates,Code Generator to the incoming code. The and calculates optimal estimates of theCode Generator output is essentially host vehicle position, velocity andmoved back and forth in time until it time. Linearized measurement data andexactly matches the incoming code, at measurement error variances are inputwhich point the code signals cancel and to an 8-state, extended Kalman filteronly the data plus any tracking errors which estimates corrections to theremain. The amount of time shift nominal navigation solution. The filterrequired to make the codes match is also maintains estimated error statis-directly proportional to pseudorange. tics in the form of an error covarianceAn Integrator then sums the sampled data matrix.signal into 1.0 millisecond samplescoherent with the assumed C/A epochs In addition to providing navigationfor software processing. outputs, the navigation solution pro-
vides estimates of pseudorange, pseudo-CHANNEL PROCESSING range rate and pseudorange acceleration
to the code correlator to aid theChannel processing functions derive receiver during acquisition to positioncarrier phase, code delay, and signal the Code Generator for sequentialamplitude estimates from the raw (1 ms) tracking operation.signal samples. The processed signalsare further summed and directed. to. the INTERFACEcode and carrier loop filters, whichare integrated at a 50 Hz (20 ms) rate The GPSRU has an Instrumentation Portand provide control outputs to the (IP) that provides a standard bidirec-hardware VCOs. Although primarily con- tional serial data interface, acceptscerned with signal tracking, channel data capture commands and generates aprocessing provides signal search, precise time mark at a 1 Hz rate. Theacquisition, reacquisition and subframe IP is used for testing and is suitable
338

as a host vehicle interface. The data Output Buffer 2:format is compatible with ICD-GPS-204data format for an Instrumentation Port. GPS satellite almanac data (whenThis is compatible with an RS232C serial requested)interface port operating at 9600 baud.
Output Buffer 3:The GPSRU also has an OMV specifiedinterface consisting of discretes and GMT at a 1 Hz (nominal) time markof four buffers with unidirectionalserial interfaces. There are three out- HARDWARE DESCRIPTIONput buffers and one input buffer toprovide for the following data transfer The GPSRU consists of four modules:and receiver control:
* RF ModuleInput Buffer: 0 Digital Module
* Interface ModuleMode control (Off, Standby 1, Standby 0 Power Supply Module2, Built-In-Test and Navigate)
A block diagram of the GPSRU is shownInitialization data (position, velo- in Figure 3. The RF module includes thecity and time) in ECI RF/IF translator, the frequency synthe-
sizer and the frequency standard. TheGPS constellation almanac data digital module contains the signal pro-
cessors, AAMP, MFI and memory. TheThrust vector (when available) in ECI interface module contains an AAMP, MFI,
memory and user interface circuitry.Update output data buffer requests
The overall dimensions of the receiverOutput Buffer 1: shown in Figure 4 are 7.70 in. wide x
8.28 in. long x 4.75 in. high, includ-X, Y and Z position in ECI coordinates ing flanges. The unit weight is 8.8
lbs. and the total power dissipation isX, Y and Z velocity in ECI coordinates 11.6 watts. The size, weight and power
are summarized in Table 4.Time tag (GMT) for navigation data
The modules plug directly into a MasterPseudorange and range rate (integrated Interconnect Board (MIB) for theircarrier VCO commands) to satellites electrical interface and are secured tocurrently being tracked the chassis with wedgelocks. Each mod-
ule is uniquely keyed to prevent cross-Navigation data error variances from plugging. A chassis assembly showingthe Kalman filter the plug-in modules is provided in
Figure 5. The Host Vehicle interfaceC/No for all satellites being tracked connectors are mounted on one side of
the receiver chassis, as shown inIndication of which satellites are Figure 4. The OMV interface consists ofbeing tracked at any specified time one 9 pin input power connector, one
SNA type coaxial RF input connector,Receiver health/mode status and one 50 pin interface connector. In
addition, there is one SNA type coaxialGDOP of primary constellation Test Connector.
339

INU IF lA F344 CHANNEL&NAV INTERFACETRNLTRPO0CESSOR PROCESSOR
PROCESOR AMP MMP
MULWi-UNCTON muL-FUNCTION
FREOIENC SIGAL ITERFCE ITERFACETestPod
(0Kx 16 TPROM) SAbAPTER :oiiro
RF MDULEDIGTAL ODU EMR IN TERFACE MDL
POWER SUPPLY MODULE+12VDC
28VDC EPAEI- +sVvc
FILTER Y _ VOC
MODECOMMANDS
*01SCN2
Figure 3. GPSRU Block Diagram
TEST CONNECTOR
HOST VEHICLE INTER' ACE
Figure 4. GPSRU Assembly
340

Table 4. GPSRU Size, Weight and Power Summary
POWERSIZE (in.) WEIGHT DISSIPATION
COMPONENT L x W x H (lbs) (w)
RF Module 7.00 x 5.75 x 1.25 1.10 2.6
Digital Module 7.00 x 5.75 x 0.6 0.54 2.6
Interface Module 7.00 x 5.75 x 0.6 0.54 3.5
Power Supply Module 7.00 x 5.75 x 1.15 1.25 2.9
MIB 5.75 x 3.50 x 0.125 0.34 N/A
RCVR Chassis 8.28 x 7.70 x 4.75 5.04 N/A(Includes Hardware)
TOTAL 8.28 x 7.70 x 4.75 8.8 11.6
SPECIFICATION 10.25 x 8.0 x 8.5 10.0 18.0
8.60
.20 . . ] A N TEN NA IN PU T
RIF MODULE IIr,
4 .7 5 D I I A M O D U L M A S T E R
L_ I INTERCONNECTINTEFAC MODLE BOARD (MIB)
POWERPPLY HOST VEHICLEINTERFACE
" r___CONNECTOR
8.28 -I
Figure 5. GPSRU Cross Section Side View
341

SUMMARY The chipset used in the receiver wasdeveloped for DARPA under contract
A spaceborne GPS receiver unit (GPSRU) F29601-85-C-0022.utilizing an advanced technology chip-set has been described. This receiver The authors also acknowledge theweighs 8.8 pounds, occupies less than support received from Juergen Bruckner0.2 cubic foot and requires 11.6 watts. of Rockwell International's CollinsIt will provide GMT and spacecraft posi- Government Avionics Division.tion and velocity. The navigation posi-tion and velocity accuracy of the GPSRU REFERENCESis expected to be approximately 16 feet(1 sigma) per axis and 0.05 feet/second 1. N.B. Hemesath, J.M.H. Bruckner,(I sigma) per axis, respectively. "DARPA's Advanced Technology GPS
Chipset," Rockwell International
ACKNOWLEDGEMENTS Corporation, Collins GovernmentAvionics Division, 1988.
The work described in this paper wasperformed under subcontract DA7917NZ8H 2. Equipment Specification Orbitalfrom TRW for prime contract NAS8-36800 Maneuvering Vehicle Global Position-issued by NASA Marshall Space Flight ing System Receiver Unit, EQ4-3734Center for the Orbital Maneuvering Rev. E, TRW Space & TechnologyVehicle (OMV). Group, 16 August 1988.
342

Application of GPS to Space-Based Tethered Array Radar
Horst Salzwedel, Kenneth M. Kessler and Fred KarkalikSystems Control Technology, Inc.
2900 Geng RoadPalo Alto, California 94909
Abstract
This paper investigates the use of GPS as an aid in establishing and maintainingcoherence of a highly distributed Space-based Tethered Array Radar (STAR) system. TheSTAR concept is a network of distributed small satellite subarrays each of which is a lineararray of elements or "string". Each subarray is made up of many dipole elements, eachwith its own receive module. In order to achieve beamforming and the radar performancedesired, the relative position and orientation of each dipole element must be estimatedwithin a fraction of a wavelength of the radar frequency.
A subset of the general problem is considered here. A single tether, subjected to en-vironmental disturbances, is modeled by a lumped mass dynamic model of the motion.Candidate GPS receiver elements with code and phase measurements are located at theend-satellites and along the tether. Based on this configuration a linear Kalman filter wasdeveloped using a model of the longitudinal and lateral motions of the tether. Torsionaleffects were neglected for this analysis.
The errors caused by solar pressure, atmospheric drag, and earth-shadow transitionswere investigated for an altitude of 1000 kilometers. The estimation error in the filterwas determined by covariance analysis, linear filtering and nonlinear simulations. using theinteractive CAE software Ctrl-dl/Model-CTM.
1. Introduction
Consider two satellites separated vertically by a string several kilometers long. Thisis a very long antenna that could be used for long-wavelength communications. Or, onecould attach many receivers along this string and have multiple strings next to each otherforming a phased array radar. Such a space-based radar can be made very light-weight.The launch and maintenance costs are therefore low even for higher altitude orbits. Fora surveillance radar application it is necessary that signals received along the tether andbetween tethers are combined coherently to form a radar image. It is therefore neccessaryto know the relative position and orientation of the receive elements to a fraction of theradar wave length and the absolute position to observation accuracy requirements. Thispaper investigates the use of GPS as an aid in establishing and maintaining coherence ofsuch a highly distributed space based radar system subject to enivironmental disturbancesof solar pressure and atmospheric drag.
Second Symposium on GPS Applications in Space, Hanscom AFB, Lexington, MA,October 1989.
343

The Space-Based Tethered Array Radar (STAR) concept under consideration evolvedfrom the DOD need for an affordable, improved surveillance system [1]. The STAR con-cept is a network of distributed small satellite subarrays each of which is a linear arrayof elements or "string" (Figure 1). In order to achieve the radar performance desired,the relative position and orientation of each dipole element must be estimated within afraction of a wavelength of the radar frequency. The tether concept, in addition of beinglightweight, appears to provide a basis for achieving the power aperture product needed todetect the small targets of interest. However, the concept presents a challenge in terms ofdynamic stability, pointing, and control. One aspect of the problem requiring a solution isthe development of an adequate integrated estimator/sensor system to accurately predicttether motion.
The approach taken in this paper is to consider a subset of the problem and to analyzethe dynamic behavior of a single tether due to high altitude disturbances. After develop-ment of a lumped mass dynamic model of the motion of a tether in space, a candidate GPSreceiver configuration that makes use of available GPS code and phase measurement datais discussed. Based on this configuration and dynamic model, a linear Kalman filter wasdeveloped using a model of the longitudinal and lateral motions of the tether. Torsionaleffects were neglected for this analysis.
Section 2 describes the basic tether dynamics, section 3 describes candidate GPSsensor configurations, section 4 shows the simulation, and section 5 evaluates GPS basedfilters.
TOP SATELLITE
I.
GPS RECEIVER
RECEIVER ELEMENTS
GPS PHASE COMAR1TORS
IOTTW SATELLITE
Figure 1: Space-Based Tethered Array Radar.
2. Tether Dynamics
The dynamics of a tether in orbit around the earth may be conveniently analyzedin terms of its steady state and its transient behavior. The steady state behavior is the
344

nominal motion of the tether in the average gravity field of the earth. The gravity gradientforces of this uniform gravity field hold the tether nominally in a vertical position relative tothe Earth's surface. The transient behavior is the flexible motion and perturbation of thetether due to non-uniformity of the earth's gravity potential, solar pressure, and interactionwith the earth's magnetic field. In adition, thermal heating due to solar, earthen and lunarradiation, magnified by the rapid transition into and out of the Earth shadow will deformthe string and introduce further dynamic perturbations.
The dynamics of the tether may be modeled as a continuum or as interconnectedpoint masses or rigid bodies. The continuum model is well suited to determine the steadystate characteristics of the string as well as the basic eigen-frequencies. However, a super-computer would be needed to integrate the resulting partial differential equation derivedfrom a force balance equation written for the earth's orbit perturbation environment. Forthis analysis we shall therefore use discretized models.
Three types of discretizations are being used in modeling the dynamics of aerospacesystems. They are finite element, finite difference and lumped mass models. Finite elementmodels are primarily used for detailed analysis of nearly linear dynamics. Finite differencemethods are dominant in fluid and thermodynamics. Lumped mass models are the easiestto implement and are used for modeling the overall characteristics of complete aerospacesystems. In this analysis we shall model libration and bowing - stretching characteristicsby lumped mass models, generally referred to as bead models in the literature on tetherdynamics.
Consider a string of point masses connected by spring/damper combinations, that aredescribed in coordinate frames (Orlov frames) that rotate at the nominal circular orbitsof these masses about the earth (Figure 2). The D'Alembert force of a point mass is equalto the forces acting on the point mass.
11
mr =Fg. + fPF p + fS, +FS, + FD. + E1
where () denotes the derivative in inertial corrdinates, fg, is the gravity force, Fsp,,, is
the spring force between the i-th and j-th mass, fs denotes the solar force, FD, denotesthe drag force and FE, is the electrodynamic force.
The acceleration may also be described by
II BB B,4 x ++ Rx p) (2)
where 'i is the vector from the i-th Orlov frame to the i-th point mass, ()B is the derivative
relative to the Orlov frame, V is the angular velocity vector from the center of the earth
to the i-th Orlov frame, and R i is the vector from the center of the earth to the i-th Orlovframe, where
B
R, =-Rik,, R2 =-(Ri + 11 )k 2 , and R =0 (3)
34 5

Coordinizing the vectors in the Orlov frames gives,
Pi= y ,(4)zi0
and- 1, 2 w 0 0 (5)
i'i . ij [zi - Rjj
2
C:
.
V
Figure 2: Bead Model of Tethered Satellite in Orlov Frames.
The gravity force is,-- ,(6)
where ri = x2 + y2 + (z - Ri) 2 and ri is the unit vector along -'r ,ri
(7)
giving
= sm , (8)rt zi - R
346

The spring damper force of a tether element between mass i and j is,
sp,;= C,(r,- loj + Dij((-, - s) (9)
for stretching and small compressions, and is approximately constant for buckling, whereCij is the spring constant, Dij is the damping constant, -'*,j is the vect. from mass i to
mass j, Vi is the velocity of mass i relative to the i-th frame, --+j is the velocity of massj relative to the j-th frame and 10, is the zero-force length of the tether element betweenmass i and mass j. The zero-force length is a function of its temperature and changes withthe periodicity of the solar incident angle and during Earth shadow transitions.
Solar Radiation Forces
An exposed surface is subjected to radiation pressure equal to the difference betweenincident and reflected momentum flux. The main sources of electromagnetic radiationpressure in an Earth's orbit are,
" Solar illumination ( Fs - 1360 W/m 2 )
" Solar radiation reflected by the Earth and its atmosphere (100 - 300 W/m 2
* Radiation emitted by Earth and its atmosphere
* Solar radiation reflected by the Moon
The momentum flux, p, acting on a surface element normal to the direction of theradiation is
p = F (10)C
where F is the radiation energy flux and c is the speed of light.
The radiation forces acting on a surface element may be divided into forces due toabsorbed radiation, forces due to reflected radiation, and forces due to diffused reflectedradiation. With the absorption coefficient, C,, the reflection coefficient, C,, the diffusioncoefficient, Cd, and C, + C, + Cd = 1, the total radiation force for one radiation sourcemay be expressed by,
- p (I - C)cos 0§ + 2(C, cos 2 0 + -cos)INdA,
fA 3
where 9 is the angle between the unit surface normal, N , and the unit vector, §, towardsthe light source.
The body surface is assumed to be comprised of spherical end-satellites, and flatsurface elements and cylinders along the tether. Integrating over different surface typeswe get, for a flat surface:
P = -pA [( - C,S + 2(C, cosO + £d)i] Cosa, (12)
347

for a sphere of radius r:
F= -p47rr 2 + Cd] S, (13)
and for a cylinder of height h:
=-p2rh -+Cd) Csin + 6Cd)cos , (14)
where Z is along the cylinder axis and tb is the angle between the cylinder axis and thesolar direction, 10 = arccos(2 • S). NOTE: In the simulation additional shadowing effectswere considered.
The total solar torque may be computed by integrating the torques caused by thesolar forces acting on the spacecraft. Figure 3 shows the analytically computed torquedue to solar pressure on a 2000m tether configuration and the sun in the orbital plane.The total torque oscillates between ±1.4Nm (Units are in Newton-meter). The resultingsteady state angle oscillates between ±0.04 *, which corresponds to ±1.4m in orbit offsetof the lower satellite relative to the upper satellite.
Sun in Orbital Plane: Ca ., Cd=,05, Cr= .851.5
..........0.5
0.0
" -0.5..................................... ..............
-10......................... ....... ........... .... .. .......
-1.5 ..
0.0 50. 100. 150. 200. 250. 300. 350. 400
Orbital Angle 0 (deg]
Figure 3: Solar Pressure Torque on Sample Configuration.
34b

Atmospheric Forces and Torques
Even though the solar pressure forces are more than 30 times larger than the forcesdue to atmospheric drag, the drag forces are significant since they are opposite the orbitalvelocity and slowly de-orbit the spacecraft. For the example configuration at an altitudeof 1000km this drag results in a de-orbit rate of 20 m/day. For this investigation, the 1977Jacchia density model 15] was used, which accounts for different atmospheric temperaturesdue to changes in solar activites.
The force due to the impact of atmospheric molecules on the spacecraft surface canbe modeled as an elastic impact without reflection [3]. The differential force, dfAERo, ona surface element dA, with outward normal N, is given by,
dIAERO = -CD-V ( ")OdA (15)
2
where 0 = -d/v is the unit vector in the direction of -V, p is the atmospheric density and
CD < 2 is the drag coefficient. The aerodynamic drag for a surface perpendicular to V isthen FD P -'4-"
FD = -CD-A v V(16)2
The aerodynamic torque on a spacecraft about its center of mass is
dA N
V
TABRO f ftx dfAERO -f iX (CDP(N' -V)"-VdA), (17)
where the integral is over the surface of the tethered spacecraft for which N • > 0, andV = Vem+ W X P,
+ / f ('+ x -))) xcm ×- )dAdA (18)
f f CD!(N CM-+ d(a c
TAR +fCD 2( -,.( *? X - x ,) dA
+f CD PINi( c(7 X P ) x d
+ fCD PD (R.T xj CM -W x ) x dA
343

Integrating over the length of the tether, the torque on the tether about the center ofmass pitch axis becomes
Ac D 62 4 11, ,2COS (2
TAERO, = A- _ - _ 1 _ V _ , (20)1 ~2 [4 2 1 3 2 1 2 co 2#(1 1
where 11 is the distance from the center of mass to the lower S/C, 12 is the distance fromthe center of mass to the string to the upper S/C, and 0 is the pitch angle. Additionalperturbations due to atmosphere dynamics were not considered in this analysis.
3. Candidate Sensor Configurations
A sensor system is required to meet the absolute and relative positioning requirementsof the radar antenna elements. Knowledge of the relative positions of the radar receiveantenna elements to an accuracy on the order of a fraction of the radar wavelength isrequired to support the phase coherency requirementt of the space based radar. Thistranslates to approximately 2cm for L-Band and 10cm for the low end of the UHF Band.The absolute positioning requirement of the entire array, with respect to the earth, is onthe order of 10 to lOOm. A number of sensor systems were considered, including:
- Laser Ranging
- NAVSTAR Global Positioning System (GPS)
- Radar's own signals
- Laser Diode/CCD Array
- Combinations of the above.
In this analysis the NAVSTAR GPS was investigated, since:
1. It appears that GPS can serve as the attitude determination sensor in addition tomeeting both the absolute and relative positioning requirements [81
2. The GPS satellites will be in place along with complete ground support by the timeneeded for space based radar. Thus, only receivers for the space based arrays need tobe c, nsidered. The GPS solution is entirely passive.
3. The GPS is highly robust. At the altitudes of interest, 10 to 15 satellites are in view.Based on a solution using the best 5 satellites, the Positional Dilution of Precision(PDOP) is less than 1.7. A 5 satellite solution was selected as a trade-off betweensolution redundancy and receiver complexity, however, there are receivers availabletoday that process up to 12 satellites per solution.
4. The DARPA GaAs GPS chip set has made available miniature space qualified hard-ware suitable for space based radar applications. By the time such components willbe needed for SBR applications, it is expected that multiple sources will be available.
5. At least three programs are already underway developing GPS receivers for precisemotion and attitude sensing in space applications ( 8, 9, 10, 11].
350

6. The GPS satellites can be augmented with "pseudolites" on the earth, if necessary,to provide a more robust mode of absolute position calibration.
Consider now a configuration with a 5 channel GPS receiver at the top spacecraftand multiple differential phase comparators mounted along the tether, aided by the topreceiver for carrier tracking. The carrier phase of each satellite can be tracked to a fewdegrees of the GPS L-Band carrier which places the phase tracking measurement errorat 1cm, one standard deviation. However, the carrier phase position solution will beimplemented in a relative mode requiring measurements from two satellites, thus the errorof the measurement will be on the order of 1.4cm, one standard deviation.
For this analysis, satellites depressed lower than 9 degrees below the local horizonwere excluded in order to eliminate those signals grazing the earth that would have largeIONO and TROPO propagation delay variations. Based on a unity gain antenna over thiselevation range and omnidirectional in azimuth, the received C/A Code signal strength, interms of carrier-to-noise ratio ( C/No) available for tracking, ranges from 32 to 55dB Hz,which is more than adequate to maintain track through the benign dynamics of the tetherelements. For comparison, the C/No observed by GPS receivers in airborne and terrestrialapplications is in the range of 25 to 30dB Hz.
In airborne and terrestial applications the tracking loop bandwidths must be wideenough to accommodate the dynamics which are more severe than for the space basedradar. A typical airborne GPS receiver might use tracking loop bandwidths of 2 to 5Hzfor the code loops and 20 to 30Hz for the carrier loop. Because of the higher C/No andlower dynamics environment of the space based radar, it should be possible to reduce thebandwidths to 1Hz or less for the code loop, and to less than 5Hz for the carrier loop.The longer integration times should result in sufficient measurement accuracy to supportthe space based radar position, velocity, and attitude estimation requirements.
4. Simulation Development
The control and/or estimation problem requires a linearized model upon which tobase the design. For this reason, the interactive CAE program Ctrl- C()/Model-CTM 16,71,was used for further analysis. Ctrl-C/Modei-CTM is a graphical interactive simulationprogram. The components of the non-linear simulation, masses, springs, and disturbanceforces, are configured into the desired model with a mouse on the computer screen. Basedon this graphical description, Model-CTMgenerates the simulation code in FORTRAN orC computer languages. ModeI-CTM's greatest benefit for this analysis is the capabilityto generate a linearized model of a simulation at a push of a button on the screen. Thelinear model is automatically placed into the workspace of the program to be available forfurther analysis including control and estimation designs.
The nonlinear model, developed within the Model-CT M framework, is shown in Figure4. Masses are connected by spring/dampers and are forced by solar pressures that considerearth shadow transitions. The sun-vector and solar pressure computations are performedin the "sun block", shown in the upper left of the figure.
351

NON-LINEAR MODEL MODEL-C
0 it ANALYSIS.
LINEARIZE
sorlI 3 LINEARIZED MODEL
X = Fx+Gu+ r w+ ~ X = STATE (POS/VEL AT DISCRETE
TETHER LOCATIONS)U= "KNOWN" DISTURBANCES
* w =DISTURBANCE NOISE
Fiur 4:SmltinMdl
seri352

Note that it is very easy to modify and manipulate the simulation. Blocks and re-gions may be copied and/or moved around in the screen. Parameters may be changed byclicking on the block and changing a few numbers in the opening menu. Outputs may beobtained by placing probes at the desired points in the block diagram. Linear models maybe obtained by placing input-output markers and selecting LINEARIZE in the analysiscapabilities menu.
Figure 5 shows the probe outputs of the simulation for solar pressure forces on theupper S/C, Fu-solar, the center bead, F3_solar, and the lower S/C, Flsolar for a STARstring with solar panel above the upper S/C and receiver elements along the tether. Inorder to analyze the effects of solar pressure transients, the simulation was initialized priorto the tether coming out of the earth shadow. Figure 6 shows the time delay between thesun illuminating the upper and lower S/C.
Tether: h-10Okm, 3-mass Tether40.
20.- . .- -,
-20.
-40 i Ii .00 100. 2000. 3000. 4000. 00. d000. 7000.
4000.
2000.
0.00Cr
-2000.
-4000.*A . . A0.00 1000. 2000. 3000. 4000. 5000. 6000. 7000.
10.
0.0Jr. -
0.00 1000. 2000. 3000. 4000. 3000. ,000. 7000.Urn. (coJ]
Figure 5: Solar Pressure Forces on the Upper S/C, Center Bead and Lower S/C.
353

Tether: h=lOOOkrn. 3-mass Tether
0.0
20.
-30.1
0."
o -20.
0. 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6 1.8 2.0
2.
0.
-2.
-4.
0aI -.. tim
0 0. 0.2 0.4 0., 0.6 1.0 1.2 1.4 1., 1.8 2.0
time (see]
Figure 6: Solar Pressure Forces on Upper and Lower S/C.
Figure 7 compares simulations describing the tether by three and five beads. Thepositions of the center of the tether relative to the upper satellite in the in-orbit direction,Xt2 - Xu, and in the vertical direction, Zt2 - Zu, do not change significantly betweenthe two simulations indicating that a 3-mass bead model may be used for basic analysis ofestimator and controller analysis. However, higher order models need to be used for theanalysis of the high-frequency bobbing motion.
Two locations along the orbit were used to obtain linear perturbation models. Specifi-cally, shadow and sun-lit trim points were used. Modei-CTM numerically perturbs dynamicstates and inputs to generate linear models of the form,
i(t) = Fx(t) + Gu(t) (21)
y(t) = Hz(t) + Ju(t)
where x is the linear state space, u is the input at the location of the input markers (seeFigure 4), and y is the linearized output at the location of the output markers.
354

Tether: h=1000km. 3/5-mass Tether4.
0.
S -2.
-4.''; -0O. 00 1000. 2000. 3000 4000. 5000. 6000. 7000.
0.00?
-.002 /
-.004
-. 0080.00 100. 2000. 3000. 4000. 5000. 6000. 7000.
time (sec]
Figure 7: Comparison of the Relative Tether Position for 3 and 5 Mass Simulations.
5. Filter Analysis
From the separation theorem for linear systems, the design of the estimator is inde-pendent of the design of the controller. Though the bowing and stretching of the tetherincludes non-linear coupling, the separation of control and estimation will be assumed inorder to get an upper estimate of the performance of the estimator.
This analysis investigates the capability and performance of a Kalman filter to re-construct the absolute and relative position and velocity of receiver elements from GPSmeasurements. This analysis consists of two parts. These are:
(1) A covariance analysis is performed to investigate the achievable estimation accuraciesfor different GPS accuracies.
(2) A linear filter and its performance in reconstructing receiver positions and velocitiesfrom non-linear simulation data, corrupted by receiver noise, is investigated.
Covariance Analysis
The filter was designed using a linearized model of a Modei-CTM based non-linearsimulation of a string,
(t) = Fz(t) + Gw(t) (22)
y(t) = Hz(t) + v(t)
355

where w(t) was chosen to be a random noise of ten percent of the solar pressure force plusa small contribution stemming from unmodeled dynamics, and v(t) was selected to be arandom GPS receiver position and velocity measurement error,
E(ww' ) = Q6(t - t'),
E(v 'T) = R6(t - t'),
E(wv'T) = 0.
The GPS configuration model included a GPS receiver at the top satellite providingabsolute position and velocity based on code and phase measurements. In addition, phasecomparator receivers, located at the center and bottom of the tether, were included toprovide very accurate position and velocity data (relative to the topmost satellite).
For the design of the filter, the linear model, obtained by linearizing about the trimpoint, was converted to a discrete model at the sample rate of the GPS measurement,giving,
z +l = Axi + B~,, E(W'-Or ) = QAt (23)Yi = Cxi + Vi,
where At is the sample rate. The sample rate chosen for this analysis was a conservativeAt = 2 aec. if x- is the state estimate before a measurement is made and z + is the stateestimate after the measurement, we may define,
M de=f E(z - x-)(X - z-)T, (24)
and denote the covariance of the estimation error after the measurement update by,
P 4dE* - -x)(X _ z+)T. (25)
The measurement update equations for the Kalman filter are then [121,
z, =x- + L,(y, -Hx),
Li = MCT(CMCT + R) - 1 , (26)
P, = M, - LCM,
and the prediction equations are
M +1 = APIAt + BQB , (27)
After some transient period, the covariance equations will converge towards steady statevalues, resulting in the steady state optimal filter equations, with
S= MRCT(CMCT + R)-', (28)
356

and M being the steady state prediction error covariance. It is M that is a measure of thefilter performance. The estimated values of the state estimation errors are then the squareroot of the diagonal elements of M, and the estimated output estimation errors are thesquare roots of the diagonal elements of the output prediction covariance matrix CMCT.
In order to evaluate the sensor requirements the achievable accuracies were evaluatedfor diffrent absolute and relative GPS sensor accuarcies. Figure 9 shows the positionand velocity estimation errors for fixed sigmas of the GPS relative measurement error of1cm and .01cm/s, absolute measurement errors ranging from 0.2m to 10m and a 2.secsampling time. The resulting position estimation errors are .05 - 0.55m in the in-orbitdirection, and .02 - .55m in the vertical directions. The velocity estimation errors rangefrom .0001m/s to .035m/s. These values are well within those required for the STARsystem. The depicted lines are for different points along the tether. The lower valuesare for the upper end-satellite and the upper line is for the lower end satellite. Figure10 shows the relative position and velocity estimation errors for fixed sigmas of the GPSmeasurements in the upper S/C of 2m and .02m/s and relative measurement errors of theGPS phase comparison ranging from .1cm to 5cm. The maximum error of 5cm for relativeposition and .038cm/s for relative velocity are less than those permissible for STAR.
Reference [131 shows that the estimation errors may be further reduced by using ahigher order models with an associated reduced model uncertainty. Additional improve-ments may be achieved by using a faster GPS sample rate.
Tether 3-rm KF': h=1000km. 3-mass Tether
.4 4o-~ .4
0. 2. 4. 6. S. 10. 0. 2. 4. 6. 8. 10.GPS Position Error [m] GPS Position Error [m]
.0013 .033 ...
S.. I, . • . . . .. .
.. 030 .
.0010 o. --° -- -
a, .. . ..
.02W
M .0000 .0100. 2. 4. 6. 8. 10. 0. 2. 4. 6. 8. 10.GPS Position Error [rn] GPS Position Error [m]
Figure 9: Achievable Estimation Accuracy.
357

Tether 3-m KF: h= 1000km, GPS pos err = 2 [m].055 - .0010
.050 .0009 -
.2 .045 .2 .0008
.040 .0007
035 .00610. .01 .02 .03 .04 .05 0 0. .01 .02 .03 .04 .05
GPS re Position Error [m] GPS ret Position Error [m]
-. 00016 ] - .040
.00014 03 /
"" g .030.00010
.00006 .025
. .01 .02 .03 .04 .05 0. .01 .02 .03 .04 .05GPS re Position Error [m] GPS ret Position 'rror [m]
Figure 10: Achievable Relative Estimation Accuracy.
Linear Filtering of Non-Linear Tether Simulation Data
The CAE package combination, Ctrl-dC()and Model.CTM, provided a convenient andefficient environment in which to simulate the non-linear string dynamics and GPS receiverelement position and velocities with a Kalman filter and compare the estimated outputswith truth data. The GPS sensor data were simulated by adding uncorrelated, Gaussianmeasurement noise to the outputs of the non-linear simulation. The simulation was ini-tialized in a trim condition in the Earth shadow just before solar forces begin impingingon various elements of the string. The outputs at the probe locations (see Figure 4) werestored as "truth" data and corrupted by assumed white, Gaussian measurement noise. Toreduce the computation time, the filter equations may be put into the form
x + = Arx + Bpy',(i+1 = i; (29)=CxiI
whereAF = A - ALC,
BF = CX,
Y j = I U

The combined propagation and update filter equations are now in the form of a discretesimulation and may be propagated by a discrete simulator, i.e., in Ctrl-d' 9 . Figures 11 -12 show overlays of the non-linear simulated "truth" data and estimated values as well asdifferences between "truth" and estimated outputs. In the Figures 0u denotes the upperend-satellite, ()L denotes the lower end-satellite, 0i... denote locations along the tether,0h denotes estimated values, and 60 denote differences between "truth" and estimatedvalues.
Figure 11 compares absolute position and velocity estimates for the upper S/C. Theabsolute position estimation errors are less than 25cm.
Figure 12 compares relative position and velocity estimates for the center of the tether.The relative position estimation errors are less than 3cm at locations with GPS phasecomparisons and twice to three times that value for locations without a relative GPSmeasurement. These results are similar to those of the covariance analysis and indicatethat the non-linear effects do not overly burden the linear filter.
6. Conclusions
For the radar architectures and tether dynamics considered, it is shown that GPSpositioning sensors have sufficient accuracy to maintain radar signal coherence for theanatenna elements mounted along a single tether. The analysis considered a tether oflength 2000m at an altitude of 1000km subject to solar pressure and atmospheric distur-bances, including earth shadow transitions. A covariance and Kalman filter analysis wasperformed to estimate the achievable relative and absolute position of the radar receiverelements. The results show that a 2m absolute GPS sensor accuracy, a 1cm relative accu-racy of GPS phase comparitors and a 2sec sample rate suffice to combine signals along thetether with a Kalman filter to an accuracy of 2cm and achieve a 25cm absolute positioningaccuracy of the string. The wave length of radar frequencies of interest range from 20cm(L-band) to 70cm (UHF). Thus this estimator, given the GPS error assumptions and theconsidered disturbance environment, can meet the position estimation requirements forcoherence, even for a L-band radar.
Further analysis is necessary to investigate the solar heating effects, higher ordergravity harmonics and unmodeled dynamics, particular torsional effects. Non-linear filterdesigns, that include the bowing coupling, may be required to get better estimates forreceiver elements between sensor locations. Additional analysis is necessary for coherentlycombining signals of different strings.
Absolute position accuracy requirements are a function of mission requirements, radar
performance and geometry. The shown achievable absolute positioning accuracy of 25cmseems to be sufficient for most applications. However, a more detailed total system analysismust be performed to investigate the subsystem error budget required to support coherenceamong several tethers in space.
35

Tether 3-m. KF: h=1OO0km. 3-mnass Tether
2.50.
0.
o0.00
-50.0.00 1000. 2000. 3000. 4000. 5000. 6000. 7000.
20.
-20.
0.00 1000. 2000. 3000. 4000. 5000. 6000. 7000.
0.20

Tether 3-rn KF: h=1OO0km. 3-mass Tether
4.
2.
S 0.
-4.0.00 1.000. 2000. 3000O. 4000. 5000. 6000. 7000.
0.002
0.00C
2 - .002-
-006-
-. 0080.00 1000. 2000. 3000. 4000. 3000. 6000. 7000.
* - .040.00 1.000. 2000. 300C. 4000. 5000. 600. 7000.
0.002.
0.00C
-.02
I-004-
-a-.006,
-. 008 V
0.00 1000. 2000. 3000. 4000. 5000. 6000. 7000.
time (sec]
Figure 12: Relative Estimates for Center of Tether.
: 61

7. References
I] Shayda, P.M., Tomlinson, P.G., Brown, T.C., Chakraborty, D., Kessler, K. M. andPritchard, J.R., "Large Apertures for Space-Based Radars, A New Concept UsingTether Arrays," Tri-Service Radar Symposium, 20-22 June 1989, West Point, N.Y.
[21 Bonifazi, Carlo, "Tethered Satellite System (TSS) - Core Science Equipment", AAS86-214, in Bainum et al. 1986, p. 173-203.
[3] Beletskii, V.V., Motion of an Artificial Satellite About its Center of Mass, Izdatel'stvoNauka, Glavnaya Redaktsiya, Moskva 1965 (NASA TT F-429).
141 U.S. Standard Atmosphere, 1976, National Oceanic and Atmospheric Administrationreport AD/A035 728, Washington, D.C., October 1976.
[51 Jacchia, L. G., "Revised Static Models of the Thermosphere and Exosphere with Em-perical Temperature Profiles," Smithonian Astrophysical Observatory Special ReportNo. 332, Cambridge, Massachusetts, May 1971.
[61 Ctrl-Cd User's Manual, Version 4.3, Systems Control Technology, Inc., Palo Alto,California, 1989.
17] Model-CTM User's Manual, Version 1.2, Systems Control Technology, Inc., 1989.
[8] Meehan, Tom, "An Experiment in Attitude, Position, and Velocity Determinationwith Rogue GPS Receiv-rs," Jet Propulsion Laboratory, Second Symposium on GPSApplications in Space, USAF Geophysics Laboratory, October 1989.
[9] Axelrad, P., and Parkinson, B. W., "Closed Loop Navigation and Guidance For Grav-ity Probe B Orbit Insertion," Stanford University, ION GPS 88, September 1988,Colorado Springs, CO.
[10] Saunders, Penny, "Space Station GPS Implementation Plans and Overview," NASAJohnson Space Center, Second Symposium on GPS Applications in Space, USAFGeophysics Laboratory, October 1989.
[11] Carson, Lance, and Hailey, Leonard, "Preliminary Experimental Results for theTOPEX GPS Demonstration," Motorola Government Electronics Group, SecondSymposium on GPS Applications in Space, USAF Geophysics Laboratory, October1989.
[121 Bryson, A. W. Jr. and Ho, Y. C., Applied Optimal Control, Ginn and Company, NewYork, 1969.
[13] Shayda, P., Tomlinson, P., Brown, T. and Kessler, K., Interim Report for Space-BasedTethered Array Radar (STAR), Decision-Science Applications, Inc. Report 137/1093,December 1989.
362;",

SPECIAL PURPOSE INEXPENSIVE SATELLITE (SPINSAT)GPS RECEIVER
Roger M. WeningerRichard Sfeir
Satellite & Space Electronics DivisionRockwell InternationalAnaheim, California
Ronald L. BeardNaval Research Laboratory
Washington, DC
ABSTRACT PURPOSE
This paper provides a description of The overall SALT mission is to deter-the GPS receiver planned for installa- mine the viability of small inexpen-tion on the Office of Naval Research's sive satellites to perform operational(ONR) SPINSAT Altimeter (SALT) satel- missions of interest to the Navy. Itlite. The receiver will use an ad- will be specifically used to gathervanced chipset developed under con- oceanographic data. In order to per-tract to DARPA that enables a 5-watt, form this mission, the position of2-pound unit. The receiver func- the satellite must be accuratelytional and hardware description are known for combination with theprovided. The navigation solution and altimetry measurements. The provenintermediate data available to the doppler beacon system, used in otherSALT processor for telemetry are oceanographic missions, will provideidentified. The receiver's environ- the primary precision trackingmental and performance requirements system. It will also provide aare also provided. comparative measure of the GPS
receiver on-orbit performance whichINTRODUCTION is proposed to be utilized in two
different modes. The first mode,In August 1989, the Satellite and discussed more fully in this paper,Space Electronics Division of Rock- is the real-time navigation mode.well International initiated work on This operation is very similar toa GPS receiver for the Office of Naval other aplications of GPS for navi-Research (ONR). The receiver is sche- gating ships and aircraft, andduled for delivery on January 31, provides accurate three-dimensional1990, and is planned to be integrated information when sufficient GPS satel-into a Commander Class satellite bus lites are in view of the receiver.with an intended launch of Spring/ The second mode is to determine highlySummer 1990. The primary payload of accurate positioning in a post proces-the bus is an altimeter. These sing mode by differential operationefforts are part of ONR's Special with ground receivers. This mode hasPurpose Inexpensive Satellite the potential of on-orbit positioning(SPINSAT) program, and this mission to better than a meter in the radialis referred to as the SPINSAT direction. An experiment is beingAltimeter (SALT). developed to evaluate this second
363

mode of operation with the SALT GPS The chipset consists of a GaAs MMICreceiver. RF/IF Translator, a Silicon Frequency
Synthesizer, a CMOS Signal Processor,The SALT satellite will be placed into a CMOS Multi-Function Interface and ana circular 800 kilometer orbit at an Advanced Architecture Micro-Processor.inclination of 1080. The positioning This chipset is configured with memoryinformation calculated by the GPS and a frequency standard into two mod-Receiver and the measured GPS data ules to make up the SPINSAT GPS recei-will be periodically transmitted to ver described herein.the ground for evaluation. The opera-tion of the receiver will be indepen- The receiver has two channels thatdent of the other onboard systems. sequentially track a selected group ofThe mission life projected for opera- GPS satellites. The channels functiontion of the satellite is three years. independently so that data from twoThe evaluation of using GPS for this satellites can be processed in paral-mission could lead the way for future lel. During normal tracking, the twoscientific and operational, missions, channels are allocated a one secondand reduce the requirements for processing interval for each satel-ground tracking sites, lite, i.e., within one second all of
the real-time functions associatedwith acquisition, tracking and naviga-
FUNCTIONAL DESCRIPTION tion are accomplished. At the end ofthe one second, the two channels
The receiver will use a Miniature GPS reacquire and track the next twoReceiver (MGR) chipset developed by satellites in their respective satel-Rockwell under contract to DARPA(1). lite assignments.The chips are shown in Figure 1 andtheir physical parameters are sum- The two channels can operate on eithermarized in Table 1. L1 (1575.42 MHz) or L2 (1227.60 MHz).
FREQUENCY SIGNALSYNTHESIZER RFIF MFI AAMP PROCESSOR
Figure 1. Miniature GPS Receiver (MGR) Chip Set
364

TABLE 1. MGR CHIP SET SUMMARY
DEVICE DIMENSIONS IMPLEMENTATION POWERCHIP TYPE COUNT (inches) TECHNOLOGY (mW)
RF/IF Translator 420 0:340 x 0.350 Gallium Arsenide 1500
Signal Processor 19,800 0.185 x 0.220 1.25 Micron Bulk CMOS 90
Multifunction Interface (MFI) 29,000 0.370 x 0.370 1.6 Micron Bulk CMOS 20
Advanced Architecture 74,000 0.250 x 0.261 2 Micron Bulk CMOS 90Microprocessor (AAMP)
Frequency Synthesizer 350 0.165 x 0.165 Bipolar Silicon 500
Normally Ll is used for general HARDWARE DESCRIPTIONprocessing with L2 being used peri-odically to obtain a separate set of The two-channel SPINSAT receiver con-measurements to aid in correcting for sists of two modules:ionospheric errors.
* RF ModuleThe receiver can acquire and trackeither or both the Clear Access (C/A) * Digital Modulecode, or the Precision Code (P-code)depending upon performance require- A block diagram of the receiver isments. As a general rule when esti- shown in Figure 3. The RF modulemated position is not well known C/A includes the RF/IF translator, thecode is used for acquisition and then frequency synthesizer and the fre-handover occurs to the P-code; how- quency standard. The digital moduleever, if the estimated position and contains the signal processors,time error is within ±300 P-code Advanced Architecture Microprocessorchips (±30000 feet), a satellite can (AAMP), Multi-Function Interfacebe acquired with P-code. (MFI), memory and RS232C interface
circuitry.A functional configuration of theSPINSAT receiver is shown in the flow The overall dimensions of the RF mod-diagram of Figure 2 which is designed ule shown in Figure 4 are 7.95 in. xto show the signal/data flow from the 5.75 in. x 1.25 in. The overallantenna input to the data output to dimensions of the digital modulethe host vehicle. The flow diagram shown in Figure 5 are 7.0 in. x 5.75also shows the functional partition- in. x 0.6 in. The combined moduleing of receiver elements among RF and weight and power requirements ofdigital hardware, and software approximately 2 pounds and 5 wattsprocessing. are summarized in Table 2.
,65

SIGNL PRCESIG CHANELEROCESIN
MUT LJM1TER Ll MW INTE- FAMCE IBPF HHOSTM~ I
17oDID MWERAIDIC ByACa
DNWE FEOUNCYtam MHFigureVC0 SYTH.IE SPNhecie uctoa losiga
3Loc

IPTRFAF 1&0 ___NPTTRANSLATORPRCSO
L1/L2 PROCSSO
FREQUENCY SIGNAL INTERFACE ntefacaSYNTHESIZERPOCSR
MODLE ODU EMR
*5SVDC +M 5VCDITL
Figure 3. SPINSAT Receiver Block Diagram
WEDGELOCK
COMPONENTS
HOSN 7..0
INPUNANT91
ACONECTOR In? CANNInCNNDOWn- 50 PA NE112884IRIM4
Figure 4. RIF Module Assembly Figure 5. Digital Module
36b17

TABLE 2. WEIGHT AND POWER SUMMARY TABLE 4. PSEUDO DATA MESSAGE
WATTS DT 1N PIWES BI T Fh: NT
WEIGHT -e - ""a
MODULE (LBS) iSV 5V-5V TOTAL Ca"C..one1 I I5% be , I n is abat RotsI
Cani a r*ttt I I Fsvo ag
RF 1.4 0.5 1 .1 0.5 2.1 Cmnl 2Blls 14Rl I at 2P.Ifty £..sttl1.tisa S1111I4 04
Pri..'y Const.161i. Wag 1loo2m0s
Digital 0.5 - 2.6 - 2.6 Re ilter bass I hafChls 1 I so"~
TOTAL 1.9 0.5 3.7 0.5 4.7 NoW , Ic.e (I12
~~Carrier fr.1 4
my WO
Less 1p (Ela or I
of.~ ~~C/n Fite Dtalluet"II ...
OUTPUT DATA Cml.. 4I :iU
61: ""Is1 I "Ifter (22 bit$)
Communications between the receiver V:I,;~s flol t PDSR to ll .b"8. 24 bit% asmisv&I
and the SALT processor is accom-plished through a serial data Inter- ENVIRONMENTAL ANDface Port compatible with an RS232C PERFORMANCE REQUIREMENTSserial port. The receiver providestwo messages at a 1 Hz rate. These The environmental and performancetwo messages consist of a Navigation requirements described in this sectionSolution Message (Table 3) and a relate to testing of the receiver atPseudo Data Message (Table 4). Rockwell prior to delivery to the
spacecraft integrator. The thermalTABLE 3. NAVIGATION SOLUTION MESSAGE cycle, thermal vacuum and vibration
__________ _____ - -tests are sunmmarized in Table 5. TheWast Of owsperformance test parameters and their
I___ required accuracy are listed inIN tot 1 .1 1Table 6.
usli mos I Week
SI'm I ai * SUMMARY
11" 2r, I a A GPS receiver pandas anexpert-Obete,4N~ 1ad I 1 o ment onboard the ONR SPINSAT AltimeterFibersof flrit I1 o (SALT) satellite scheduled for launchwelft W f64 a~iWI P in the Spring of 1990 has been des-
Is(VwvrlesIP 3(t1 PP 1 a cr1 bed . This receiver consists of an
Sws a _ RF and a digital module having aTOTAL. total weight of 2 pounds and a power551(1, - - -requirement of 5 watts. The unit will
BO Iw Is so"? of vftam les p e use an advanced technology chipsetM61 is sase fwnsIl oo el developed by Rockwell under contract
1,.foi"glas I it *Roos Hst$ =011664) to DARPA. The data generated by thetot: E.1*0*4 Fluttles ( Potel @.11 660va. 40 bit$ 101005") receiver and available for telemetry
36b

TABLE 5. RECEIVER ENVIRONMENTAL ACKNOWLEDGMENTSTEST REQUIREMENTS
The work described in this paper isbeing performed under contract from
TEST REQUIREMENT the Office of Naval Research (ONR).The ONR project manager is CDR RobertH. Meurer, Jr.
Thermal Cycling 4 cycles - each(Receiver cycle -150 C The chipset to be used in theOperating) Room Temperature receiver will be transferred from
+35°C DARPA contract F29601-85-C-0022.
Thermal Vacuum 2 cycles - each The authors also acknowledge the sup-(Receiver cycle -15°C port being received from NorbertOperating) +350C Hemesath and Juergen Bruckner of
Rockwell International's CollinsRandom Vibration 18G - RMS, Government Avionics Division.(Receiver Not 1 minute per axisOperating) REFERENCES
1. N. B. Hemesath, J.M.H. Bruckner,
was defined. The environmental and NDARPA's Advanced Technology GPSperformance test requirements of the Chipset," Rockwell Internationalreceiver prior to delivery were Corporation, Collins Governmentprovided. Avionics Division, 1988.
TABLE 6. RECEIVER PERFORMANCE TEST REQUIREMENTS
PARAMETER ACCURACY(*)
Time-to-First-Fix at C/N0 = 36 dB-Hz (Ll C/A) Less than B min (90% probability)with initial PVT uncertainty of150 KM in position, 180 M/S invelocity and 1 sec in time
Time-to-Achieve-NAV Accuracy Less than 2 minutes
L1 C/A Pseudo-Range Error at C/N0 = 36 dB-Hz Less than 8 M (I sigma)Ll P Pseudo-Range Error at CAN0 = 33 dB-Hz Less than 2 M (I sigma)
L2 P Pseudo-Range Error at C/N0 = 30 dB-Hz Less than 2.5 M (I sigma)
Ll Delta Range Rate Error at C/N = 36 dB-Hz Less than 0.03 M/S ( sigma)
L2 Delta Range Rate Error at C/N = 30 dB-Hz Less than 0.07 M/S (1 sigma)
NAV Position Error Less than 8 M per axis (I sigma)
NAV Velocity Error Less than 0.15 M/S per axis
(1 sigma)
Absolute Time Error Less than 1 microsecond (I sigma)
*Selective Availability Not Enabled
369

Discussion:
Question: Why is this receiver so much lighter than the one for the OMV?
Answer: This receiver does not have its own case and power supply. There isnot as stringent a radiation requirement for SPINSAT and shielding is providedby the spacecraft housing.
Question: Will the GPS receiver be run continuously during the SPINSAT mis-sion?
Answer: That will depend on the GPS constellation available in 1990 and, sinceit is not the primary payload, on whether it can be accommodated within thedata telemetry capacity and other mission objectives.
Question: Will this receiver be operated differentially with some groundtracking station?
Answer: We are looking into that possibility but it was not part of the origi-nal plan.
Question: How many satellites will be tracked simultaneously?
Answer: The receiver tracks two simultaneously and switches every one secondto maintain track on a set of four primary and a set of other potentiallyuseful satellites. That makes it difficult to operate in the differentialmode - again, it was built to provide real-time navigational information.
Question: Do the errors that you quote include satellite segment and controlsegment errors?
Answer: The pseudo-range and range-rate errors are receiver noise contribu-tions only. The navigation errors include satellite and ground controlerrors.
37t

THE DEFENSE MAPPING AGENCY'S OPERATIONAL GPS ORBIT PROCESSING SYSTEM
James A. SlaterDEFENSE MAPPING AGENCY SYSTEMS CENTER
The DMA in conjunction with NSWC has been producing global GPS orbits continu-ously for more than a decade now and will continue to do so as funding pro-vides. DMA provides ephemerides, tracking data, and geodetic positioning tosupport the development, test, and evaluation of weapons systems. By-productsof the orbit determination include estimates of satellite clock states andearth orientation parameters, as well as quality control for Air Force opera-tional broadcast ephemerides.
The GPS tracking network consists of 5 DMA and 5 Air Force monitor stations.These 10 permanent tracking stations provide for global coverage, differentialapplications, and redundancy. DMA stations are outfitted with T14100 recei-vers and a cesium clock; they collect pseudorange, Doppler, navigation mes-sage, and weather data for daily transmission to DMA. The receivers are beingupgraded to handle anti-spoofing and selective availability. Clock analysesare performed on-site, producing estimates of frequency bias, effects due toaging, and the Allan variance, in order to identify station clock anomalies.
The data flow for GPS ephemeris generation begins with the tracking data fromthe Air Force and DMA monitor stations which are then merged and fed intoDMA's OMNIS orbit determination software which produces an ephemeris and clockoffsets. A reference orbit based on various force models is used to correctand edit the observations and is then combined with the edited observations inthe multi-satellite filter/smoother. The data consist of 15-min smoothedranges from the 10 stations and are processed to produce 8-day fits providing7-day arcs with half-day overlaps on either end. Estimated parameters includeorbital elements, radiation pressure parameters, satellite clock and stationclock parameters, polar motion, and rate of change of UT1-UTC. Orbital preci-sions are typically about 1 m in radial, and 2 - 3 m in along-track and cross-track components. Along-track error increases significantly during eclipseperiods. Another check on internal consistency that is being introduced isthe repeated computation of absolute positions of each tracking station usingthe broadcast and precise ephemerides. Typical values in north, east, and upcomponents of position error are 2 - 4 m using the broadcast ephemerides and0.5 - 1.3 m using the precise ephemerides generated by OMNIS.
Future improvements being planned include tuning the filter for Block II sat-ellites, estimating earth orientation rates, adjusting for station heightbiases, and possibly accommodating GPS cross-link ranging.
Discussion:
Question: How good are the polar motion and UT1-UTC estimates?
Answer: For polar motion, about 11 cm in x and y; for UT1-UTC, about 0.13msec/day. These are with respect to the IERS final values.
371

DMA'S INTEREST IN PRECISE GPS
ORBITS
* HISTORICAL USE OF TRANSIT SATELLITESFOR GEODETIC POSITIONING WORLDWIDE
* CONTINUED NEED FOR GLOBAL POSITIONING
* TEST AND EVALUATION SUPPORT OFWEAPONS SYSTEMS
* SUPPORT OF OTHER DMA PRODUCTS
(E.G. MAPS)
372

BY-PRODUCTS OF DMA'S ORBIT
DETERMINATION
* PRECISE SATELLITE CLOCK PARAMETER
ESTIMATES
* QUALITY CONTROL FOR AIR FORCE
BROADCAST EPHEMERIDES, CLOCKS ANDURE'S (SPS AND PPS)
* EARTH ORIENTATION VALUES
37.3

EPHEMERIS GENERATION AT DMA
* TRACKING STATION NETWORK
* DMA MONITOR STATIONS
* MONITOR STATION CLOCK ANALYSIS (CHAP)
* DATA PREPROCESSING
* ORBIT COMPUTATION (OMNIS)
* ORBIT QUALITY ASSESSMENT
* ORBIT PRODUCTS FOR DISTRIBUTION
374

CONTRACTOR SUPPORT TO DMA
APPLIED RESEARCH LAB. MONITOR STATIONUNIVERSITY OF TEXAS HARDWARE/SOFTWARE
NAVAL SURFACE WARFARE ORBIT DETERMINATION
CENTER
'375

If Eve I
i- .1
- -~ ~ i.'
- . J -Jbea ~ b '~ -;
w L,.
L cc
0 cj I - I'. I . 11
I *L.
* c
Cl.8
CL Lai
ji j I
S., 3

DMA STATION LOCATIONS CHOSENTO--
1. ADD HIGHER LATITUDE COVERAGE INNORTHERN AND SOUTHERN HEMISPHERES
2. OBTAIN 2 (OR MORE) STATIONTRACKING OF EACH SATELLITE AT ALLTIMES
* ALLOWS USE OF DIFFERENTIAL
DATA TYPES* PROVIDES REDUNDANCY IN CASE OF
STATION OUTAGE
3. BE ACCESSIBLE TO U.S. PERSONNEL FOROPERATIONS AND MAINTENANCE
377

DMA MONITOR STATIONS
INSTALLATION DATES
ARGENTINA DEC 1985ENGLAND JAN 1986AUSTRALIA MAR 1986ECUADOR FEB 1987BAHRAIN JUN 1987
378

DMA MONITOR STATION FEATURES
* DATA EQUIVALENT TO AIR FORCE OPERATIONAL CONTROL
SEGMENT STATIONS
* TI 4100 RECEIVERS WITH
ARL:UT "CORE" SOFTWARE IN RECEIVER
ARL:UT "BEPP" SOFTWARE IN PC
* HIGH PRECISION CESIUM CLOCK
* COLLECT -
PHASE-SMOOTHED PSEUDORANGE (PPS)CONTINUOUS COUNT INTERPOLATED DOPPLER DATANAVIGATION MESSAGESURFACE WEATHER DATA
* ON-SITE QUALITY EVALUATION
* DAILY DATA TRANSMISSION TO DMA
* ON-SITE DATA ARCHIVING
37J

HARDWARE BLOCK DIAGRAM
ANTENNA/PREAMP
AF/OC
RF/IDC RF
T14100 T14100RECEIVER #1 DMI 0ST. AMP 5Mz RECEIVER #2
I- 28VDC 5MHz 28VDCDATA DATA
COMMAND CE:ScIUM COMMANDCONTROL ECONTROL
POWER POWER POWERSUPPLY SELECTOR SUPPLY
#1- #2
AUTOMATMPAIBC
WEATHER SSESTATIONPRNE MDM
SGDCB890720-2CB
3t

DUAL GPS RECEIVER POWER SUPPLY
TI-4100 GPS RECEIVER #1
TI-4100 GPS RECEIVER #2
BLANK PANEL
H P5061 A CESIUM FREQUENCY STANDARD
~.BLANK PANEL
HP 5087A DISTRIBUTION AMPLIFIER
SBLA1JK PANEL
III.I EQUIPMENT RACK BLOWER
CB8070- EQUIPMENT RACK # 2CB
381

SOFTWARE
AUTOMATED DATA COLLECTION LOOP
* SCENARIOS GENERATED FROM TEMPLATE
* DATA STORED ON DISK
DAILY ACTIONS
* OPERATOR INITIATED
* DATA QUEUED IN RECEIVER DURING DAILY ACTIONS
* QUALITY ANALYSIS
* CLOCK ANALYSIS
* FORMAT DATA FOR TRANSMISSION
* MARK DATA FOR ARCHIVING
* TRANSMIT DATA
* ARCHIVE DATA
3 2

INARY DAT
QUALITYSUMMARY PROES
PROCESS FL
DATA A
* CLOCK (PROCESS.BAT)SUMMARY AH
4 EMiRI
QUALITY FILES ,
MERGE DATAINTO
TRANSMISSIONPACKETS
(MERGE.BAT) OBSERVATION DATA
MESSAGNSMISSIONTRANSMIT DATATO GE MARK III
(MIRROR)
GEMARK IIII SEND/RETRIEVE
MESSAGE TRAFFIC _____
(MIRROR)
ARCHIVE DATA
FIGURE 3
DATA PROCESSING AND TRANSMISSIONSGD (OPERATOR CONTROL)BT881220-1JLW
383

ON SITE ANALYSIS
DATA QUALITY ANALYSIS
* SUMMARY BY SATELLITE: TRACKING STATUS
PERCENTAGE OF GOOD DATA COLLECTED
CLOCK ANALYSIS
4 INPUT DATA: 15 MINUTE AVERAGED RANGE RESIDUALS
DATA ALIGNED IN SIDEREAL TIME
RESIDUALS BY SATELLITE
0 SAVE SELECTED DATA IN 32 DAY HISTORY FILE
* PRODUCE ESTIMATES OF: FREQUENCY BIAS
AGING
STABILITY (ALLAN VARIANCES)
384

z 0c00
0 M
0.j z
oj R
C)
u' w
100 4c
z I-0LU,
0.
MN33Id - 8861. u~iuvfl H1ufl0.i uo~I U~io3,i1oo v.LvU
3 8)'a

CLOCK HISTORY ANALYSIS PROGRAM(CHAP)
OBJECTIVE: IDENTIFY STATION CLOCK
PROBLEMS
* COMPUTES AND STORES RECEIVER TIME
BIASES AT EACH RANGE MEASUREMENT TIME
* REJECTS BAD DATA
* FIXES LARGE JUMPS IN TIME BIAS
* ESTIMATES CLOCK PARAMETERS FOR
1 DAY (CURRENT)2 DAYS (CURRENT AND PREVIOUS)
32 DAYS (HISTORY)
INCLUDING FREQUENCY BIASAGINGSTABILITY (ALLAN VAR.)
386

CHAP CLOCK ANALYSISBASED ON 2 DAYS
ARGENTINA 11 JAN 89
FREQUENCY BIAS BASED ON 1-DAY DIFFS.
NUMBER OF FREQUENCY BIAS (NS/DAY)PRN DIFFERENCES 2-SIG. AVG. SIGMA
6 13 77.3 2.59 22 90.0 4.2
11 2 84.2 1.412 19 86.0 2.813 17 86.8 4.2
ALL 73 85.7 5.4
387

CHAP CLOCK ANALYSISBASED ON 33 DAYS
ARGENTINA 11 JAN 89
LINEAR REGRESSION ON TIME BIAS TIME SERIES(UNITS: TIME BIAS = NS, FREQ. BIAS = NS/DAY)
PRN TIME BIAS SIGMA FREQ. BIAS SIGMA3 2835.7 22.1 87.7 .76 2797.2 11.1 86.5 .29 2809.9 7.8 86.7 .111 2747.2 7.3 86.1 .212 2800.2 13.3 86.7 .213 2804.2 10.6 87.0 .2
TIME SORT (ALLAN VARIANCE)(DAY5) (SEC/SEC)
1 2.1E-132 6.9E-144 2.6E-1 48 1.1E-14
388

CHAP 33 DAY CLOCK HISTORY
*SV PRN 3*
3-DAY WALKING FREQUENCY (NS/OAY) SY-GROUND TIME BIAS (NS)(SV-GROUND) VS. DAY OF YEAR
VS. DAY OF YEAR 478433-NS & -6638 NS/DAY RMVD
81.0 *75001.0*
-620.0*
-1321 .0 ***** ***
348 358 2 12 346 357 11
*SV PRN 6*
3-DAY WALKING FREQUENCY (NS/DAY) SY-GROUND TIME BIAS (NS)(SV-GROUND) VS. DAY OF YEAR
VS. DAY OF YEAR -420000 NS & -1288 NS/DAY RMVD
-1253.0 174.0 ~*
-1300.0 * ** **43.06*
-1347.0 ** *-88.0
348- 358 212 346 357 1 12

0-J
0
0
U-i
V) :
0 J
LULL
LU 000
LU)(1) 0%
00LU
z -J0wFn) 00V z
w ~00 0 z w
390

ORBIT DATA PROCESSING
PREPROCESSING:
* COMBINE AF AND DMA DATA INTO
IDENTICAL FORM
* MODIFY "NOMINAL CLOCKS AND
EVENTS FILE" FOR MASTER CLOCKSWITCHES, MOMENTUM DUMPS ANDOTHER CLOCK EVENTS NOT ON FILESTRANSMITTED BY AF OR DMASTATIONS
* VALIDATE WEATHER DATA
OMNIS
* CORRECTOR * FILTER
* EDITOR * SMOOTHER
* INTEGRATOR * PROPAGATOR
~391t

~C C,,c oOctU C, _zL.C.
0I-
C,)
Cl) =l
cm, LL
z(h) C,,
Xc.) t=>oU UJ 0
0 L0
m. 1 0 0
~150
0r
cn9

I- _ w0 w 0-
WI LiJ WL -
0L 0 W
I V)o 0-Z W<I
o. oW
j=) V)J <LIJ
oj oit LL<QV)0 X LL ()
F-W 0-0
V) 0 z)
od z o
LL. 0 z

V)w>Z
DLJ )xw V)>
WLLJ - >-V
00awo-
lw -
-LaJ
LL LL.
0 (f w
H: 0 V
0d Jf L L (l sLd H zw <in
Lii JZI 0~ w )
Q zw IX Q ) _ W
Linz 0 p0
o 0 ct zLo 2 1 w94

z0
0
LLI0>LL C,
z C
E-- -AJ uF- 25
0 a%'E*
Z.~ ZL0 L) Zd
u < 0 zZ0-U0 V) H- V)Z d
z
0 u u-L~-rjrF (L 0<z
E -- I 0 d )iLj1 0 D0NL
LLI0 *,. 00 C1Li LJ 0 D 0H
Z o ?
D 395

C CD
W 41C
-J w. cm
Ca w w 3- Me
ME I-- C0
"E ME wCl OC COa
ac MC.'A C
LA c- eM C)
- E- IA. I-~ P-
La.Ia La U
~ I" A 31- CO)
-iLL 1 1.. e C c
C- am Co
IA'm bmc P m C C
Lai ME ) CD = cc D C
LD CD CD D
=A =sa
I-M
39t;

0r _10V () V(I) V)NLL Z>ou 0> -F LW
0-o LL WUL 0>z
> 0>
j-~rI I-L - Ezo Vo M~)Q w Uo)r
<0 L o z <)
Z Id WZO0<m 0
LLI< U LLOZ
0 0
0 -1
-J Ix mm)20ZF0 V) 0 1)LLI Z 0397

04 UV-
IV)
V-0
0H U
(I) UzH ~~ 0-~wI 0
<I< w 6 zLi FLJ w 0: 0
Cl)V _ 0)L&E--4 Z 0L
U)~~ LL H &
< 0wU w LL.
p 0 w 0 U
-i~a*I z z
E- <H w 0 0 wa0LI 0
LI V) LL
0 0 0wL (Lw.. -
_3 C) 398

z Zw cn
_ H 0
H_0 CL C) C M Oco CDV_
0 0~
a:) a: c C
0) 0 1)U~CL QJ L..L
0 ~ Hu C
2 0 cc 6o
w
399

0
ix-
0y
o 0.
LL 2
U.U
L'J
CL
0
ml 0
(00 in
400

0
aaU.U
0)0
o 0Sn0
~VI
C114N
0. (ml 09'5
(N) 0N~b .1-10 40

0
0
0)00 0LL. LOl
QI)
0Coi
00
0
C)
00
7-j
402

0-(N
(Y
(A0
C)
0
LL L
LL. I
0
0
0
m I-I
0 0
1 -)
(VN) 3ON3d:13-dIC 403

MEAN 0 0.1 S.D. = 3.70o 000
oo•o oo o
,,....00.,"......0 0-~ ~~~ ....................°....-.-- - ............. .......... .......o ........ .- 0 .. . ...............
00- % 0 00
0, ..... ... .... .... ... ........ ................... , .................. ............ ........ .
8S
87.6 88.2 85.S9 -
YER"""
MEAN =-0.8 S.D. - 2.1A A
. ............................... i . . . . . . . .................. ................................... ......... .
Aa. .... .... .......... ...... ... ........... ... ........... ........ ........... ......... .. ...atAASQ 4- = . ..... pm = ,.. ,.A r P ,= = I ' = ..........
4A
. .. . P ,." . . . ..- . . . .I""" ........ . . . ": ; .,w ....... A .......... ... . "..... ......
zs& AA
576 S
A A
YEAR+ MEAN =2.3 S.D. =4.0
CC . ............................... :.... . .......................... . .................... . .. ....... .. .......
In . .............. .. .. .... . ... . ..... ........ .... . ,..... ..... .... .......". 44 + + + + +_
c0. ... .... , , . .. , .T ... .. ::.... .... ............ 4 ...... ,. . . ....... . . .. ... . .... .. .. .+ 4+ 9 +4 + 4.
-- "- . +++ i+u ; + i + +Z +
.- .. . . . ..... . .. . ........+* * +~,.. + .9++ 4~.cc.. ..... ...............* ....... . .. 4..# ....+ + .....
+. 4 . ~ ~ . s. 4 4
+ ++ + :+ +4
S7.6 88.2 81.8YEAR
NSWC SOLUTIONS WITH THE BROADCAST EPHEMERIS
404

conMEAN =-0.3 S.D. = 0.5
.. .. .. .. .. .. .. .. .. ... . ... . .. .. .. .. .. .. .... .. . .. ..
S748788i2s.S 89.0
YEARMEAN =-0.4 S. D. rn0. 5
.. ......... .......... ........... ................ ... .
87.4 87.8 8i5.2 85.5 89.0
YEARMEAN =-1.2 S.D. =1.3
44.43 .4... . .. ... .
+
87.4 87.8 852856s.G
YEAR
NSWC SOLUTIONS WITH THE PRECISE EPHEMERIS
405

X X. x.. .. *. . .. .. . . . . . . .. ... ....... .. .... ..
XXX:
X X x
XX
x X AcXX0
X
I - xI Ix (n
........ -x
k . . .......... X . ........
0 0
0 ;~
0~ 0AX
~, "00
00o 0 0
0 . 0** '7
0 0 0 o00
0 S'
6 9 0 - 0- 6
0 006

.. .. ... .. ... .. ... .. . .. .. . .. .. . .. .. . .. .. . .. .. . .. .. . .. .
dtI
x x ocIn... .. .. .. ... .. .. .. .. ... .. .. . ... .. .. .. .. ... .. .. .. ..x.
cr.
0.
6 9 £ 6-(W) H18~ON
.. . . .. . . . . ... . . . . . . . . . . .. . . . . . . . . . ... ... . . .. . . .
.. . .. . . . .. . . . . . . . . . . . . . . ... ... . . . . . ... . . . . . 0
.. . ... . . . . . . . . .. . . . . . . ... .. . .. . .. .
0* * . . C000
0 ~ 0
00
:0 9
41 07

ABSOLUTE POSITIONING
ALBROOK, PANAMA
DMA'S GASP SOFTWARE
NO. OF INDEPENDENT SOLUTIONS = 16
EPHEM./.LOCK STD. DEV. OF SOLUTION (M)
X Y Z LAT LONG HT
BROADCAST 1.6 1.2 1.2 1.2 1.6 1.1
PRECISE 0.7 0.7 0.6 0.6 0.8 0.7
4
408

DMA GPS EPHEMERIS PRODUCTS
* PRECISE EPHEMERIDES
(ECEF, POS., VEL., WGS-84)
* PRECISE CLOCK STATE ESTIMATES(SATELLITE CLOCKS)
* EARTH ORIENTATION VALUES
* SMOOTHED OBSERVATIONS
(15 MIN CORRECTED RANGES)
409

0
++~~+ ++++ 3+++ IN- 1 0
ctm) +1+ 0
000
0 co+
z 0 SU 0 0 + ++ +s0O 00
0 OC C)
0 ootc+ + ±+4C
EOc +*
+a * 04- +
1030 (+ I -o
03 0w 00
CCI
(r43) 30N383-4-410

00
ED +
+
00+-0+0
co(0 0 S i
c + 0 Q V)0) + 00 w
0 +0 z V-,0 0 + < o
0l+0 ZL w 000 + * O
01 -E0 0 0 I
+ E D uw 0 + L.I
+ w
+ WL&J4+ 00 (fl(
) 0 0 + a - L LV)+ 00
0 0 + _
+ u a.l
0
w 0 0 +w+ 00o
00+00 +
0 + V0 0 (a
+ 00++ 00 0
0 0+00 0 +I
+C
wl 14 N a 1 * % o 4 I o 0 C1 l -
C; C; 4 C4 (N
AV'/03SY4

+)+
*144
L0 L
41.

FUTURE ORBIT PROCESSINGIMPROVEMENTS
* FILTER TUNING
BLOCK II SATELLITE CLOCKSORBIT MODELING (RAD. PRESS.)
* PARTITIONING OF FILTER
* EARTH ORIENTATION RATES
* STATION HEIGHT ADJUSTMENT
* CROSS-LINK RANGING
413

414

A SHUTTLE EXPERIMENT TO DEMONSTRATE 6-DEGREE-OF-FREEDOMNAVIGATION WITH GPS
Duncan B. Cox, Jr. and, Steven GardnerMAYFLOWER COMMUNICATIONS COMPANY, INC.
and
Neal CarlsonINTEGRITY SYSTEMS, INC.
The objective of this effort is to define an experiment to demonstrate theutility of GPS in determining position and, particularly, attitude in space.The observations used to accomplish this are accumulated phase and pseudorangefrom multiple antennas. The unique features of a space application includehigh velocity, greater visibility of GPS satellites, rapidly changing GDOP(many opportunities for good geometry), and special environmental effects(temperature, pressure, vibration due to boost environment). One goal of theexperiment is to achieve low cost - use existing equipment and be able toretrieve it for use after the experiment and perform post-mission data analy-sis. The Shuttle meets many of these requirements for a low cost experimentsince it is a vehicle specifically designed to deploy experiments in space.
In order to determine attitude one needs three or more antennas observing atleast two satellites, one in the plane defined by the antennas and one overthis plane. Although the Shuttle does have antennas, there are no preampli-fiers; hence the proposed experiment includes its own deployed array of anten-nas in the cargo bay. A determination of attitude requires an accurate refer-ence. Errors contributing to the reference include star-tracker errors, iner-tial navigation system drift, alignment transfers, structural bending betweenthe star-tracker and the experiment package. Based on rotation data from arecent Shuttle OMV-type experiment, the difference between attitudes regis-tered by two indepenent INS's show a stability of about +/- 0.2 mrad over 2000sec., which is consistent with our goal of a few milliradian accuracy in theexperiment.
Ideally, the experiment can be packaged in an existing experiment module, suchas the "GAS can" (Hitchhiker program) which is specifically available forspace experiments. There are several options for mounting the module in theshuttle bay area and considerable analyses have been done on thermal condi-tions inside the can for different Shuttle attitudes with respect to the sun.
The experiment is very simple, but various integration procedures would delayactual flight of the experiment to about 3 years.
415

0I
4H b.z-0 I,
44-,
c) a
4., )Q C416l

) 6-4
0~ 0.
0 0
o4 -
U 0
0- 0 c4-)
0 P- 5-,Gv C)0o Q) d) 0 0
r .4 ; > U ) - -0
0~P.4 V
$ .
14 d
-41

00b0
~ CID
I2
4-41
CIDC)"
41

Q) t4)
0 4.
IIE- co --
oo 0&4
U) l)
Cf))
41

COV
42

.0
00
174I
0
0oo 4 .,4.4
ClCD
C)~C)~
Cl)421
----- -- .. ... .

C14-
CCIO
1.5
Itt
o op
CIDl
0.
CIO)Q
422

U)F
00.
14~~
Cl) Q
Cf)
4-CC) Cl)
> In
423

.. 4l
4-4-
co)
U2 m C)
4) 0 Q
0-4cv~)
40 P.4
5-4 c4
-~ - ~ 4 cz
cz - 4
on co U4 o
424

0~
CL
N~- (j u
J00 -
0~ D cr)
0
u C..)IL LUI
I (1)
LLI 0
z1 ~LU
U U,LU-
IL- I--
0U wUL
0. I-
LU D u
U
c- U-b 0-
0
O2cO Obi~'O 09100 090,0 000*0 0900O-
425

. 0.)0 o
cnC)
cfU)
426
I I Ilill ll ill l J IlJl 0

0
427

0
0
-J
>2L
WC.
cc
mI
Nw
4a
428

00
z 0)zz
0 U0 0
0 z 002
zz
0 U0
0
uLJLlU-
429-

0
Q)
NN
(\J
430

.j
co CL
( U
xxa cc. 02
-J E u. c
<L 06 0 U0 LL 0
E LL
C.
LO L
CCCI-.
0 IL) c
LL431

0 0
< 0< LL)
uw w :
a.WZ I/)
00
0- <
IL -J
(M) U3MOd OOA~d

L~L.I
CC'
Ln A
C)
C) 0 LAJM 0e C) CZ'
- -
I-
L~LA
LA --
t-) ce -J L
.. j LA- . LA
L LAI. uh -j Li .Jr4. L&J
0 0A is-
433

U)0
0U (5) V)k. L-C) 'D- al)
C13(Uo L)
- U C) 0tCY c I NC: ci
o c0 -.
30 0 1z0 0
".o a) EEcz E
a) 0 -
o) ccz - U-. a)
Lij 0a)0 0 -0 :.- E 'o r
U) 0 -
0~ _n
0-00- .
0 oU ". cn Oa) E
k.< E = I0~ U U NcO E(D )O0C C I- .- 0
CZ N :3a) m~0L 0, C0 0 CD
0.0 0 cxLCc 0 U*
C)) U)a 0 a) N
r-- C- o : 1-.
f)0 0 z
cc m n .0a) C 434

ci
co
CCl4
-4-
0.
HkCnm -P o
;> V
IP-4
CIO)o(z a4
V n
43b

436

LARGE SPACE STRUCTURE DISPLACEMENT SENSING USING ADVANCED GPS TECHNOLOGY
Gaylord K. Huth and Sergei UdalovAXIOMATIX
Aside from space navigation and attitude determination, other space applica-tions of GPS include time transfer and differential tracking control of nearco-orbiting spacecraft, and structure control of large spacecraft (flexurecontrol). One motivation for using GPS for any of these other applications isreduced cost compared to competing techniques. This paper addresses the lastof the above mentioned application, i.e. structure control.
Consider a beam anchored at one end with GPS antennas at each end. Movementcan be monitored by interferometrically observing the phases of the GPS carri-er signal at the two antennas. In space the beam is not anchored, and thedeflections of the beam are referred to some average position. The number ofantennas is proportional to the length of the beam.
A simulation was done with a beam in orbit on the scale of the space station.The receiver model assumed the TOPEX receiver and the multipath contributionwas computed on basis of TOPEX receiver antennas situated about 0.3 m abovethe beam. Multipath was the major error contribution in the simulation. Thebeam had a 1 Hz vibration with a 5 cm amplitude. The mean error for modelingthe vibration using the differential GPS phase measurements was about 0.6 mm,which was due almost entirely to multipath; and the standard deviation wasabout 5 mm, again influenced mainly by multipath.
It is noted from this simulation that GPS is a viable technique for structurecontrol, but there are other available techniques. With a laser retro-reflec-tive array or with inertial sensors (accelerometers and gyros) one obtainshigh performance and moderate to low cost. Therefore, if GPS cost can bereduced then it becomes a competitive technique.
Discussion:
Question: How much model error did you introduce into your simulation?
Answer: The vibration was assumed to be perfectly known. We did not try todemonstrate the absolute observability of actual beam vibrations, but merelythe capability to observe a given vibration.
Question: Why is GPS being considered for this application when simple accel-erometers and strain gauges will accomplish the same thing?
Answer: We wanted to determine if GPS could do this, in case it becomes costeffective (e.g., if a spacecraft already has a multitude of antennas and re-ceivers on board for other purposes).
437

w
E xL0 z L
W ij - 00?S z C0
LL
LL
F-< z
W WUw ccw 0 ci)
< 0D-ci
W LL Ia
LU L2w
> wI~LU
w zC LM LL 0
LU .-W
4TU

x> LU
me-0E LU - PaEON()uo OwO
-
wC,)
w w
< IU
0 0ILLL
LL 0
Owxw z Go
LU
C,/,
0.
439J

E 1LU0~ !I
D
crI QQa:
0 z<~
IL 0a
a: 0cc w z
m w CL
,-l < w Z20 cF- W :-G
- a F zCO~: 0- ) c F
aw00
z440

EN
E vEoC 00
C, 0
z
Cla)
4(441

NEE E_ E E E
0 N L C
E ~I 0 IT
< c. z
D CO. <3 <
20~ 00z co
fl00
00
m 1w t
o C!F Fi
sjalw'joj3 jawaise0
u44

U
4-0EJ w
cc
w
S)H w
IJUi <0 0 a:z LLJz0
< 00 (0:
aww0 0 0W U
I.Q IDOW C) w
0 z z 0-R Flo Qw 0r 0
w 5Ow 2'U)wHa: + c
I-0 wwwo w z <
4 w z-2 cI ww 0) C/)
cc : a:)He z
-J F
443

x
E0
xw
w 0
:50 0 Iw- W w (
0 0
I- 0 Uz
'0 -j
0 w
-w < CC)w
6 uj(I) : 0
OD a. Lu w c444

Cl) 0
clw Cf ZZwJ 0 < 0
N owNON D LL wr- i z< 0 13
-J 0 W
L, Co 0.w CC C
Z 2t =w C(* C) cc C, ZQ -
z Hzw r<
z z 0 WLJ
w 0<0
zm Z Cuw
I-- COz z (0 0
LU L445 :

co
0) SI U
-. 4 4.ltt
00"0
w Us
9 8 iO 0 00)
0..4) to)
NW t
C.)~(1) qpglV in
(U Tfl)S E)*.lPS~
0 O
W VI Wf%4
0r 0
4o 1%0 f"I
(1) 44-446

w22
LL w st-o E>a: C) z 0
L FC 10N 0-
0~ V
1- >- In
cc z
0 CU
~~ CD
C. 7- I
>- ~a:
CLC
F8E(usa) vaa vnI3.j~
w
w z
() II LL -Jw U.
C9 C/)
( oia o~ i0 vflois3u
447

Cl,awC~Cuol 0c m <
I-r0 - WD ~CO) c w c
I~~ 00, .
Wu s >0~~ LUco U
ol cc 0 00ul Cl)
LU LU- D
CL~ WLU~ 0
m coC.) d.c.)
44,8

S I
* I
* I
cc IIo IO
*i I
I3 Ij
a Ia-
a. I.a L Co. CI Ij
I I
C.) *449

CN 0
C',:
0'0)
UV)
LI. LoCa
0J 00C0
+ +
CC
0 450

TEC (1Oel/rn )I- C4J (P CR q
00(. 0l 0
00
E 002 0 0
0 0cc0 0 4
0 0
0(00
Z o
10v4 000
cm) 0
Q ) 00, 1 O - U C) - 0 F
N .- V- V- V- -"I N(su) eouejeu;Ia Aislea
451

15 2TEC (10 el/rnm
2 ao
I I
Elevation (deg)0 0 0 0 0 0 0 0
C0 c
m C3
0(
00
CL 0
c~cm0;
4)
Uc 0o \00 0 0Y
(su) Aslea SO984d 890ISPOO sflup epoo
-152

The Second Symposium on GPS Applications in Space10-11 October 1989
Attendees
Joseph M. Aein Charles C. Counselman, IIIThe RAND Corporation MIT Room 37-5522100 Street, N.W. Cambridge, MA 02139Washington, D.C. 20037
Duncan Cox, Jr.J. David Antonitis Mayflower Communications Co.Intermetrics, Inc. 80 Main Str.733 Concord Ave. Reading, MA 01867Cambridge, MA 02138
Edgar S. DavisPenina Axelrad Jet Propulsion LaboratoryStanford University MS 238-540Hansen Labs (GP-B) 4800 Oak Grove Dr.Stanford, CA 94305-4085 Pasadena, CA 91109
Mr. Ronald L. Beard Wayne DeatonCode 8320 EL23Naval Research Laboratory Marshall Space Flight Center4555 Overlook Ave., S.W. Huntsville, AL 35812Washington, DC 20375-5000
Dimitri DelikaraoglouRobert Cantwell Energy, Mines and ResourcesRaytheon Company Canada Centre for Surveying/GSDBox 3203 615 Booth St.528 Boston Post Rd. Ottawa, OntarioSudbury, MA 01776 CANADA KIA 0E9
Neal Carlson David DelphenichIntegrity Systems, Inc. 78 Schooner Lane600 Main St., Suite 4 Shalimar, FL 32579Winchester, MA 01890
Newton DurborawLance Carson Motorola, Inc.Motorola/GGG Strategic Electronics Division2501 S. Price Rd. 2501 S. Price Rd.Chandler, AZ 85248 Chandler, AZ 85248
Greg Charlton Donald H. EckhardtGE-GCSD Geophysics Laboratory/LWBuilding 13-6-1 Hanscom AFB, MA 01731Front and Copper StreetCamden, NJ 08102 Robert Edge
Proudman Oceanographic LaboratoryOscar Colombo Bidston ObservatoryUniversity of Maryland BirkenheadAstronomy Program Merseyside L43 7RANASA Goddard SFC, Code 626 UNITED KINGDOMGreenbelt, MD 20904
Mr. Al EvansLewis Cook Naval Surface Weapons CenterNASA MSFC Dahlgren, VA 22448Huntsville, AL 35812
453

Steve Gardner Christopher JekeliMayflower Communications Co. Geophysics Laboratory/LWG80 Main St. Hanscom AFB, MA 01731Reading, MA 01867
J. Edward JonesDavid Gleason HQ AFIA/INTBGeophysics Laboratory/LWG Bldg 5681Hanscom AFB, MA 01731 Bolling AFB, DC 20332-5000
Stephen Goldman Seymor KantGE-GCSD NASA/GSFCBldg 10-7-1 Code 701Front and Copper Street Greenbelt, MD 20771Camden, NJ 08102
Mr. Fred KarkalikLuke Gournay Systems Control TechnologyHY-Tech Services, Inc. 2300 Geng Rd.P.O. Box 1145 P.O. Box 10180Granbury, TX 76048 Palo Alto, CA 94303
George Hajj Leo KeaneJet Propulsion Laboratory/238-640 The MITRE Corporation4800 Oak Grove Dr. 7525 Colshire DrivePasadena, CA 91109 Mail Stop Z341
McLean, VA 22102-3481
Chris HarrisonGeodynamics Corp. John Kelley5520 Ekwill St., Suite A NASASanta Barbara, CA 93111 Code T-FOB 10
600 Independence Ave., S.W.David Hoffman Washington, D.C. 20546NASA/JSCMail Code FM46 Mr. Paul Landis, M.S. 8322Houston, TX 77062 Naval Research Lab
4555 Overlook Avenue, S.W.James Huddle Washington, D.C. 20375Litton Guidance & Control Systems500 Canoga Ave. Stephen LichtenMS 67/35 Jet Propulsion LaboratoryWoodland Hills, CA 91367-6698 MS 238-640
4800 Oak Grove Dr.Dr. Gaylord Huth Pasadena, CA 91109Axiomatics, Inc.9841 Airport Blvd., Suite 1130 Dr. John LundbergLos Angeles, CA 90045 Center for Space Research
Dept. of Aerospace EngineeringJames Impastato The University of Texas at AustinRockwell International Austin, TX 78712Space Transportation Systems Division12214 Lakewood Blvd. Dr. Gerald MaderDowney, CA 90241 Code N/CGII4
National Geodetic SurveyBarry Irwin 11400 Rockville PikeU.S.G.S. Rockville, MD 20879Quissett CampusWoods Hole, MA 02543
454

Dr. Andre Mainville Mr. William RileyGeodetic Survey of Canada EG&G Frequency Products, Inc.615 Booth St. 35 Congress St.Ottawa, Ontario Salem, MA 01970CANADA KIA OE9
Thomas RooneyCharles Martin Geophysics Laboratory/LWGUniversity Research Foundation Hanscom AFB, MA 017316411 Ivy LaneGreenbelt, MD 20770 Horst Salzwedel
Systems Control Technology, Inc.James Matthews 2300 Geng Rd.Raytheon Company, Box 1K9 Palo Alto, CA 94303528 Boston Post Rd.Sudbury, MA 01776 Woody Satz
Mayflower Communications Co.Mr. T.K. Meehan 80 Main St.Jet Propulsion Laboratory Reading, MA 018674800 Oak Grove Dr., M.S. 238-600Pasadena, CA 91190 Ms. Penny E. Saunders
NASA/JSCWilliam G. Melbourne Houston, TX 77058Jet Propulsion LaboratoryMS 238-540 George Schauer4800 Oak Grove Dr. Motorola, Inc.Pasadena, CA 91109 2501 S. Price Rd.
Chandler, AZ 85248Scott MurrayNASA/JSC Richard SfeirHations Co. Rockwell International80 Main St. S&SED Space ElectronicsReading, MA 01867 3370 Miraloma
Anaheim, CA 92803Howard ParksMotorola, Inc. Lt Col Gerald Shaw2501 S. Price Rd. Geophysics Laboratory/LWM/D G-1206 Hanscom AFB, MA 01731Chandler, AZ 85248-2899
Richard ShiJeff Patterson McDonnell Douglas Space SystemsMcDonnell Douglas Space Systems Co. 5301 Bolsa Ave.16055 Space Center Blvd. Huntington Beach, CA 92647Houston, TX 77062
James SlaterAllan Posner Defense Mapping AgencyJHU - Applied Physics Lab Systems Center/SGGJohns Hopkins Rd. 8623 Lee HighwayLaurel, MD 20707 Fairfax, VA 22031-2138
George Priuvolos David SonnabendMayflower Communications Co. Jet Propulsion Laboratory80 Main St. MS 301-125JReading, MA 01867 4800 Oak Grove Dr.
Pasadena, CA 91109Harley RhodehamelMayflower Communications Co.80 Main St.Reading, MA 01867 455

Everett Swift Sien-Chong WuNaval Surface Warfare Center Jet Propulsior LaboratoryCode K-12 MS238-624Dahlgren, VA 22448 4800 Oak Grove Dr.
Pasadena, CA 91109Charles TaylorGeophysics Laboratory/LWG Dr. Thomas P. YunckHanscom AFB, MA 01731 JPL 238-640
4800 Oak Grove DriveMr. Hal Theiss Pasadena, CA 91109Code TNASA HeadquartersWashington, D.C. 20546
Dr. Catherine L. ThorntonJPL 238-6404800 Oak Grove DrivePasadena, CA 91109
Dan ToomeyMotorola, Inc., CEG2501 S. Price Rd., MD G-1206Chandler, AZ 85248-2899
Milton Trageser9 North GatewayWinchester, MA 01890
Dr. Triveni N. UpadhyayMayflower Communications Co.80 Main StreetReading, MA 01867
Jerome VetterApplied Physics LaboratoryJohns Hopkins Rd.Laurel, MD 20707
Mr. Phil WardMail Station 8443Texas Instruments, Inc.P.O. Box 869305Plano, TX 75086
Mr. Roger M. Weninger, Mail Code DB04Rockwell Space Electronics Systems Div.P.O. Box 31703370 Miraloma AvenueAnaheim, CA 92803
Leonard WilkC.S. Draper Laboratory555 Technology Square, MS-6E .S GOVERNMETPINTING OFFICE:| QO-700-000/O0007
Cambridge, MA 02139
456