
GENERAL PHYSICS PH 221-3A (Dr. S. Mirov) Keypeople.cas.uab.edu/~mirov/Sample Test 4 Fall...
14
GENERAL PHYSICS PH 221-3A (Dr. S. Mirov) Test 4 (12/03/07) STUDENT NAME: ________________________ STUDENT id #: ___________________________ ------------------------------------------------------------------------------------------------------------------------------------------- Key Sample ALL QUESTIONS ARE WORTH 20 POINTS. WORK OUT FIVE PROBLEMS. NOTE: Clearly write out solutions and answers (circle the answers) by section for each part (a., b., c., etc.) Important Formulas: 1 Motion along a straight line with a constant acceleration 1. Motion along a straight line with a constant acceleration v aver. speed = [dist. taken]/[time trav.]=S/t; v aver.vel. = x/t; v ins =dx/t; a aver. = v aver. vel. /t; a = dv/t; v = v o + at; x= 1/2(v o +v)t; x = v o t + 1/2 at 2 ; v 2 = v o 2 + 2ax (if x o =0 at t o =0) 2. Free fall motion (with positive direction ) g = 9.80 m/s 2 ; y = v aver. t v aver. = (v+v o )/2; v = v o - gt; y = v o t - 1/2 g t 2 ; v 2 = v o 2 – 2gy (if y o =0 at t o =0) 3 Motion in a plane 3. Motion in a plane v x = v o cos; v y = v o sin; x = v ox t+ 1/2 a x t 2 ; y = v oy t + 1/2 a y t 2 ; v x = v ox + at; v y = v oy + at; 4. Projectile motion (with positive direction ) v x = v ox = v o cos; x = v ox t; x v ox t; x max = (2 v o 2 sin cos)/g = (v o 2 sin2)/g for y in = y fin ; v y = v oy - gt = v o sin - gt; y = v oy t - 1/2 gt 2 ; 5. Uniform circular Motion a=v 2 /r, T=2r/v 6. Relative motion P A PB BA PA PB v v v a a 7. Component method of vector addition 1
Transcript of GENERAL PHYSICS PH 221-3A (Dr. S. Mirov) Keypeople.cas.uab.edu/~mirov/Sample Test 4 Fall...

GENERAL PHYSICS PH 221-3A (Dr. S. Mirov) Test 4 (12/03/07)
STUDENT NAME: ________________________ STUDENT id #: ___________________________ -------------------------------------------------------------------------------------------------------------------------------------------
KeySample
ALL QUESTIONS ARE WORTH 20 POINTS. WORK OUT FIVE PROBLEMS.
NOTE: Clearly write out solutions and answers (circle the answers) by section for each part (a., b., c., etc.)
Important Formulas:
1 Motion along a straight line with a constant acceleration1. Motion along a straight line with a constant accelerationvaver. speed = [dist. taken]/[time trav.]=S/t; vaver.vel. = x/t; vins =dx/t; aaver.= vaver. vel./t; a = dv/t; v = vo + at; x= 1/2(vo+v)t; x = vot + 1/2 at2; v2 = vo
2 + 2ax (if xo=0 at to=0)
2. Free fall motion (with positive direction ) g = 9.80 m/s2; y = vaver. t vaver.= (v+vo)/2; v = vo - gt; y = vo t - 1/2 g t2; v2 = vo
2 – 2gy (if yo=0 at to=0)
3 Motion in a plane3. Motion in a plane vx = vo cos; vy = vo sin; x = vox t+ 1/2 ax t2; y = voy t + 1/2 ay t2; vx = vox + at; vy = voy + at;
4. Projectile motion (with positive direction ) vx = vox = vo cos; x = vox t; x vox t;xmax = (2 vo
2 sin cos)/g = (vo2 sin2)/g for yin = yfin;
vy = voy - gt = vo sin - gt; y = voy t - 1/2 gt2;
5. Uniform circular Motion a=v2/r, T=2r/v
6. Relative motion P A P B B A
P A P B
v v va a
7. Component method of vector addition 1

A = A1 + A2 ; Ax= Ax1 + Ax2 and Ay = Ay1 + Ay2; A A Ax y 2 2 ; = tan-1 Ay /Ax;
The scalar product A = c o sa b a b
ˆ ˆˆ ˆ ˆ ˆ( ) ( )x y z x y za b a i a j a k b i b j b k
= x x y y z za b a b a b a b
The vector product ˆ ˆˆ ˆ ˆ ˆ( ) ( )x y z x y za b a i a j a k b i b j b k
ˆˆ ˆˆˆ ˆy z x yx z
x y zy z x yx z
x y z
i j ka a a aa a
a b b a a a a i j kb b b bb b
b b b
ˆˆ ˆ( ) ( ) ( )
y
y z y z z x z x x y x ya b b a i a b b a j a b b a k
1. Second Newton’s Law ma=Fnet ;
2. Kinetic friction fk =kN;
3 St ti f i ti f N3. Static friction fs =sN;
4. Universal Law of Gravitation: F=GMm/r2; G=6.67x10-11 Nm2/kg2;
5. Drag coefficient 212
D C A v
6. Terminal speed 2
tm gv
C A
7. Centripetal force: Fc=mv2/r
8. Speed of the satellite in a circular orbit: v2=GME/r
9. The work done by a constant force acting on an object: c o sW F d F d
10. Kinetic energy: 212
K m v
11. Total mechanical energy: E=K+U
12. The work-energy theorem: W=Kf-Ko; Wnc=K+U=Ef-Eo
13. The principle of conservation of mechanical energy: when Wnc=0, Ef=Eo
14. Work done by the gravitational force: c o sgW m g d 2

1. Work done in Lifting and Lowering the object:
; ; f i a g f i a gK K K W W i f K K W W
2. Spring Force: ( H o o k ' s l a w )xF k x ( )x
3. Work done by a spring force: 2 2 21 1 1; i f 0 a n d ; 2 2 2s i o i f sW k x k x x x x W k x
4. Work done by a variable force: ( )f
i
x
x
W F x d x
5. Power: ; ; c o sa v gW d WP P P F v F v
t d t
6. Potential energy: ; ( )f
i
x
xU W U F x d x
7. Gravitational Potential Energy:
( ) ; 0 a n d 0 ; ( )f i i iU m g y y m g y i f y U U y m g y
8. Elastic potential Energy: 21( )2
U x k x
9. Potential energy curves: ( )( ) ; ( ) ( )m e c
d U xF x K x E U xd x
10. Work done on a system by an external force:
F r i c t i o n i s n o t i n v o l v e d W h e n k i n e t i c f r i c t i o n f o r c e a c t s w i t h i n t h e s y s t e m
m e c
m e c t h
t h k
W E K UW E E
E f d
i n tm e c t hW E E E E 11. Conservation of energy: i n t
i n tf o r i s o l a t e d s y s t e m ( W = 0 ) 0m e c t h
m e c t hE E E
12. Power: ; a v gE d EP Pt d t
;
13. Center of mass: 1
1 n
c o m i ii
r m rM
14. Newtons’ Second Law for a system of particles: n e t c o mF M a
3

1. Linear Momentum and Newton’s Second law for a system of particles: a n d c o m n e td PP M v Fd t
2. Collision and impulse: ( ) ; ;
f
i
t
a v gtJ F t d t J F t
when a stream of bodies with mass m and
speed v, collides with a body whose position is fixed a v gn n mF p m v v
t t t
t t t
Impulse-Linear Momentum Theorem: f ip p J
3. Law of Conservation of Linear momentum: f o r c l o s e d , i s o l a t e d s y s t e mi fP P
4. Inelastic collision in one dimension: 1 2 1 2i i f fp p p p
5. Motion of the Center of Mass: The center of mass of a closed, isolated system of two colliding bodies is
not affected by a collision.
6. Elastic Collision in One Dimension: 1 2 11 1 2 1
1 2 1 2
2; f i f im m mv v v vm m m m
7. Collision in Two Dimensions: 1 2 1 2 1 2 1 2; i x i x f x f x i y i y f y f yp p p p p p p p
8. Variable-mass system:
( f i r s t r o c k e t e q u a t i o n )
l n ( s e c o n d r o c k e t e q u a t i o n )
r e l
if i r e l
f
R v M aMv v vM
S9. Angular Position: ( r a d i a n m e a s u r e )S
r
10. Angular Displacement: 2 1 ( p o s i t i v e f o r c o u n t e r c l o c k w i s e r o t a t i o n )
11. Angular velocity and speed: ; ( p o s i t i v e f o r c o u n t e r c l o c k w i s e r o t a t i o n )a v gd
t d t
12. Angular acceleration: ; a v gd
t d t
4

1. angular acceleration: 2
1 ( )2
12
o
o o
o o
t
t
t t
2 2
2
2 ( )12
o o
o t t
2. Linear and angular variables related:
22 2 2v rT 2; ; ; ; t rs r v r a r a r T
r v
3. Rotational Kinetic Energy and Rotational Inertia:
2 2
2
1 ; f o r b o d y a s a s y s t e m o f d i s c r e t e p a r t i c l e s ;2
f o r a b o d y w i t h c o n t i n u o u s l y d i s t r i b u t e d m a s s .
i iK I I m r
I r d m
y y
4. The parallel axes theorem: 2c o mI I M h
5. Torque: s i ntr F r F r F
6. Newton’s second law in angular form: n e t I
7. Work and Rotational Kinetic Energy: ; ( ) f o r ;f
if id W c o n s tW
2 21 1; w o r k e n e r g y t h e o r e m f o r r o t a t i n g b o d i e s2 2f i f i
d WP K K K I I Wd t
2 2d t
8. Rolling bodies:
2 21 12 2
s i n f o r r o l l i n g s m o o t h l y d o w n t h e r a m p
c o m
c o m c o m
c o m
v R
K I m v
a Rga
2 f o r r o l l i n g s m o o t h l y d o w n t h e r a m p1 /c o m
c o m
aI M R
9. Torque as a vector: ; s i nr F r F r F r F
5

1. Angular Momentum of a particle: ( ) ;
s i nl r p m r vl r m v r p r m v r p r m v
d l
2. Newton’s Second law in Angular Form: n e td ld t
3. Angular momentum of a system of particles: 1
n
ii
n e t e x t
L l
d Ld t
4. Angular Momentum of a Rigid Body: L I
5. Conservation of Angular Momentum: ( i s o l a t e d s y s t e m )i fL L
6. Static equilibrium: n e t
, , ,
0 ; 0i f a l l t h e f o r c e s l i e i n x y p l a n e 0 ; 0 ; 0
n e t
n e t x n e t y n e t z
FF F
7. Elastic Moduli: s t r e s s = m o d u l u s s t r a i n
8. Tension and Compression: , E i s t h e Y o u n g ' s m o d u l u sF LEA L
9. Shearing: , G i s t h e s h e a r m o d u l u sF LGA L
10. Hydraulic Stress: , B i s t h e b u l k m o d u l u sVp BV
11. Simple harmonic motion: 2c o s ( ) ; s i n ( ) ; c o s ( )m m mx x t v x t a x t
12. The Linear Oscillator: , 2k mTk
m k
13. Pendulums:
2 , t o r s i o n p e n d u l u m
L2 , s i m p l e p e n d u l u m
ITk
Tg
I
2 , p h y s i c a l p e n d u l u mITm g h
6

1. Damped Harmonic Motion: 2
222
1( ) c o s ( ' ) , ' , ( )4 2
b t b tm m
m mk bx t x e t E t k x em m
2 1( ) i ( )k k f f 2. Sinusoidal waves: ( , ) s i n ( ) , , , 2 my x t y k x t k f v f
T k T
3. Wave speed on stretched string: v
4. Average power transmitted by a sinusoidal wave on a stretched string: 2 212a v g mP v y
5. Interference of waves: 1 1' ( , ) [ 2 c o s ] s i n ( )2 2my x t y k x t
6. Standing waves: ' ( , ) [ 2 s i n ] c o smy x t y k x t
7. Resonance: , f o r 1 , 2 , 3 , . . .2
v vf n nL
8. Sound waves: ,Bv
9. Interference: 2 ( 2 ) f o r 0 , 1 , 2 , 3 . . . , c o n s t r u c t i v e i n t e r f e r e n c e
2 ( 2 1 ) f o r 0 1 2 3 d e s t r u c t i v e i n t e r f e r e n c e
L m m
L m m
2 ( 2 1 ) f o r 0 , 1 , 2 , 3 . . . , d e s t r u c t i v e i n t e r f e r e n c em m
10. Sound Intensity: 2 22
1, , 2 4
sm
P PI I v s IA r
11. Sound level in decibels: 1 2 2( 1 0 ) l o g , 1 0 /oo
Id B I W mI
12. Standing wave patterns in pipes:
, 1 , 2 , 3 , . . . , f o r p i p e o p e n e d f r o m b o t h e n d s2
, 1 , 3 , 5 , . . . , f o r p i p e c l o s e d a t o n e e n d a n d o p e n e d a t t h e o t h e r4
v n vf nL
v n vf nL
13. Beats: 1 2b e a tf f f
7

1. The Doppler effect: f f vv
R
s
' ( ) 1 , vR the speed of the receiver; vs the speed of the
sound;(vs=331m/s); + f i hi i i + for receiver approaching stationary emitter,
- for receiver moving away from the stationary emitter;
f f vE'
1
1, vE the speed of the emitter, vs the speed of the sound,
vE
s 1
- for emitter approaching stationary receiver, + for emitter moving away from the stationary receiver;
' general Doppler Effects Rv vf f general Doppler Effect
s E
f fv v
8

9

2. Your grandfather clock’s pendulum has a length of 0.9930 m. if the clock loses half a minute per day, how should you adjust the length of the pendulum?
LFor a simple pendulum 2
Suppose clock's pendulum oscillates "n" times in a day.
LTg
1
pp p y(24 3600 30) 86370
after the adjustment of the pendulum's lengthnT s
2
2
(24 3600) 86400
2
nT s
LgT L
864002
1 1
Take ratio 2
gT LT L
g
2
1
8640086370L
2
2 2
4
86400 0.9930 0.9937863700 9937 0 9930 7 10
L
L L m
10
2 1 0.9937 0.9930 7 10L L m

11

4.
12
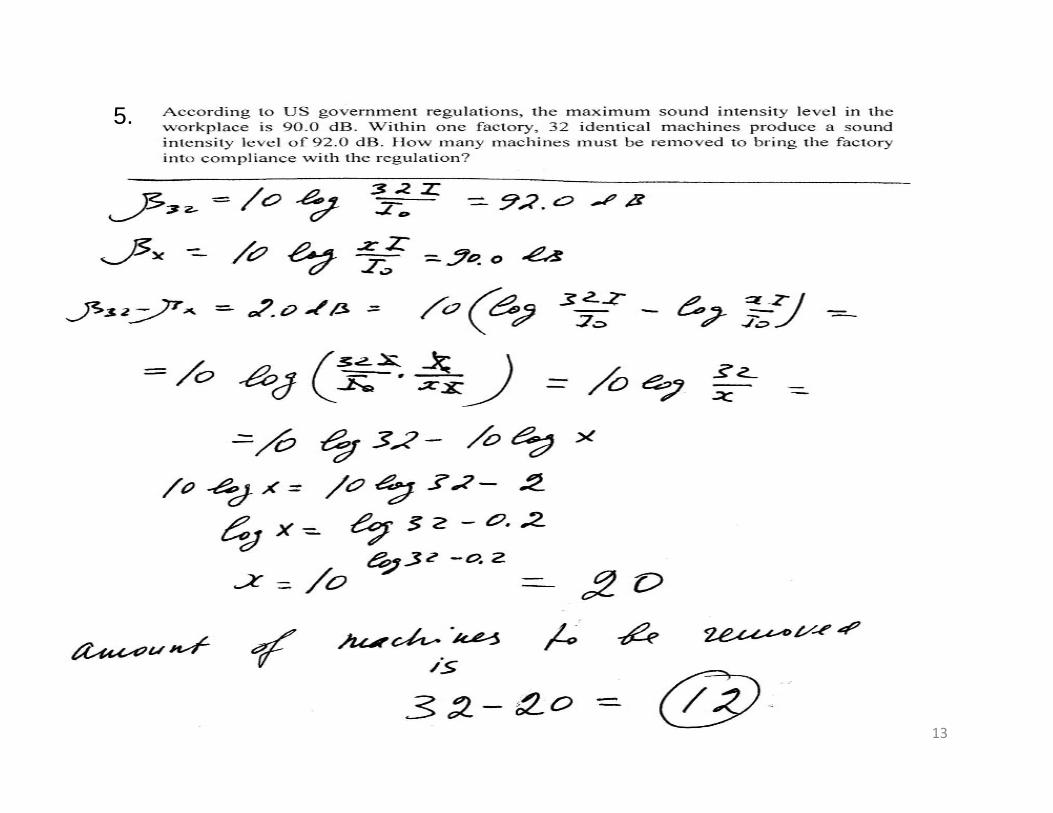
5.
13

6.
14









![Sample Test 2 Spring 2013 - University of Alabama at ...mirov/Sample Test 2 Spring 2013.pdfMicrosoft PowerPoint - Sample Test 2 Spring 2013 [Compatibility Mode] Author: mirov Created](https://static.fdocuments.us/doc/165x107/5ed080befc259b65af6104b8/sample-test-2-spring-2013-university-of-alabama-at-mirovsample-test-2-spring.jpg)








