
GAS TURBINE PERFORMENCE BASED CREEP LIFE ......a gas turbine, also a combustion turbine (CT), a...
38
GAS TURBINE PERFORMENCE BASED CREEP LIFE ESTIMATION USING SOFT COMPUTING TECHNIQUE ALMEHDI MOHAMED ZARTI A thesis submitted in fulfillment of the requirement for the award of the Degree of Master of Mechanical Engineering Faculty of Mechanical and Manufacturing Engineering University Tun Hussein Onn Malaysia DECEMBER 2012
Transcript of GAS TURBINE PERFORMENCE BASED CREEP LIFE ......a gas turbine, also a combustion turbine (CT), a...

GAS TURBINE PERFORMENCE BASED CREEP LIFE ESTIMATION USING
SOFT COMPUTING TECHNIQUE
ALMEHDI MOHAMED ZARTI
A thesis submitted in
fulfillment of the requirement for the award of
the Degree of Master of Mechanical
Engineering
Faculty of Mechanical and Manufacturing Engineering
University Tun Hussein Onn Malaysia
DECEMBER 2012
iv
ABSTRACT
Accurate and simple prediction system has become an urgent need in most
disciplines. Having the accurate prediction system for gas turbine components will
allow the user to produce reliable creep life prediction. Focusing on the turbine
blades and its life, the current method to calculate its creep life is complex and
consumes a lot of time. For this reason, the aim of this research is to use an
alternative performance–based creep life estimation that is able to provide a quick
solution and obtain accurate creep life prediction. By the use of an artificial neural
network to predict creep life, a neural network architecture called Sensor Life Based
(SLB) architecture that produces a direct mapping from gas path sensor to predict the
blade creep life was created by using the gas turbine simulation performance
software. The performance of gas turbine and the effects of multiple operations on
the blade are studied. The result of the study is used to establish the input and output
to train the Sensor Life Based network. The result shows that the Sensor Life-Based
architecture is able to produce accurate creep life predictions yet performing rapid
calculations. The result also shows that the accuracy of prediction depends on the
way, how the gas path sensor is grouped together.

v
CONTENTS
TITLE i
DEDICATION ii
ACKNOWLEDGEMENT iii
ABSTRACT iv
CONTENTS v
LIST OF TABLES viii
LIST OF FIGURES ix
LIST OF SYMBOLS AND ABBREVIATIONS xii
CHAPTER 1 INTRODUCTION 1
1.1 Introduction to Gas Turbines
1.2 Problem Statement
1.3 Project Objectives
1.4 Project Scope
vi
CHAPTER 2 LITERATURE REVIEW 8
2.1 Common Failure in the Gas Turbine Hot Section
2.1.1 Fatigue
2.1.2 High Temperature Corrosion/Oxidation
2.1.3 Creep Deformation
2.2 Creep Life Estimation Approaches
2.1.1 Model-Based Approach
2.1.2 Service-Based Approach
2.1.3 Statistical / Probabilistic Approach
2.1.4 Soft Computing Approach
2.3 Artificial Neural Network
2.3.1 Introduction to Artificial Neural Network
2.3.2 Advantages of Neural Networks
2.3.3 Neuron Model
2.3.4 Multilayer Perceptron Network Architectures
2.4 Some Previous Works
CHAPTER 3 METHODOLOGY 35
3.1 Research Methodology Diagram
3.2 Research Methodology Diagram
3.3 Proposal Model
3.4 Work Setup
3.4.1 Engine Model Construction
3.5 Generate and Train Data
3.5.1 Train Samples

vii
CHAPTER 4 DATA ANALYSIS AND DISCUSSION 49
4.1 Result and Discussion
4.2 Effect of Engine Operation and Health Condition
on the Blade‟s Creep Life
4.2.1 Effect of Altitude
4.2.2 Effect of Engine Rotational Speed
4.2.3 Effect of Ambient Temperature
4.2.4 Effect of Mach Number
4.3 Train Network
4.3.1 The Performance of the Network Using Unseen
Test Samples
4.4 Compare results
CHAPTER 5 CONCLUSION 69

viii
LIST OF TABLES
2.1 Finalized parameter(s) for each cluster 32
3.1 Test range of selected parameter 42
3.2 Step size for each parameter 43
3.3 Sample parameter 44
3.4 Training parameter 45
3.5 Error ranges used to assess the performance of the trained
Approximates 48
4.1 Summary of the impact analysis 61
4.2 Percentage of samples within the specified range for all
the Tests 62
4.3 Percentage of samples within the specified range for all
the Tests 64
4.4 Percentage of Samples Encompassed Within the
Specified Error Range for RB, FB, SB, SLB 67
ix
LIST OF FIGURES
1.1 Schematic for a) an Aircraft Jet Engine; and
b) A land-Based Gas Turbine 2
1.2 Cutaway View of the Rolls-Royce Trent
900 Turbofan Engine 3
1.3 Increase of Firing Temperature With Respect
to Turbine Blade Alloys Development 5
2.1 Deformed Turbine Blades under Creep Attack 11
2.2 Life Span of Hot Section Component Due
to Creep Deformation 12
2.3 Single Input Neuron 18
2.4 Some Common Transfer Functions 19
2.5 Multiple-Input Neuron 20
2.6 A Multiple-Input Neuron Using Abbreviated Notation 20
2.7 A Single-Layer Network of S Neurons 21
2.8 Layer of S Neurons, Abbreviated Notation 22
2.9 Three Layer Network 23
2.10 Abbreviated Notation of Multilayer Network 24
2.11 Back Propagation of Error 25
2.12 Weights and Bias Update 25
2.13 SRT Specimen (a) and Its Location in Blades (b) 27
2.14 Failed Stator Blades 28
2.15 Fracture on the Studied Blade 30
2.16 Different Mappings Between the Cluster Parameters 31
2.17 Range-Based Architecture Based on Mapping 1 33
x
2.18 Functional-Based Architecture Based on Mapping2 34
2.19 FB Architecture with Degradation Levels and
Operation 35
3.1 Illustration of Research Idea 36
3.2 Research Methodology Diagram 38
3.3 Mappings 4 39
3.4 Simplified Sensor-Based Architecture for Clean Engine
Case 39
3.5 Engine for Helicopter 40
3.6 Engine Model Configuration 41
3.7 The Neural Network Training 45
3.8 Training, Validation and Test Samples During Network
Training 46
3.9 Training, Validation and Test Samples During Network
Training 47
4.1 Plot of TET Against Altitude 50
4.2 Plot of Tm Against Altitude 51
4.3 Plot of Max Stress Against Altitude 51
4.4 Plot of Mass Flow Against Altitude 52
4.5 Plot of Mach No Against Altitude 52
4.6 Plot of PCN Against Altitude 53
4.7 Plot of Creep Life Against Altitude 53
4.8 Plot of TET Against PCN 54
4.9 Plot of Rotor Temp Against PCN 55
4.10 Plot of Max Stress Against PCN 55
4.11 Plot of Mass Flow Against PCN 56
4.12 Plot of Altitude Against PCN 56
4.13 Plot of Mach No Against PCN 57
4.14 Plot of Creep Life Against PCN 57
4.15 Plot of TET Against Ambient Temperature 58
4.16 Plot of TET Against Rotor Temp 58
4.17 Plot of TET Against Max Stress 59

xi
4.18 Plot of TET Against Mass Flow 59
4.19 Plot of TET Against Creep Life 60
4.20 Enforcement of SLB Neural Creep Life Estimation Architecture 62
4.21 Percentage of Samples Encompassed Within the Specified Error
Range for Test 1 64
4.22 Percentage of Samples Encompassed Within the Specified Error
Range for Test 2 65
4.23 Percentage of Samples Encompassed within the Specified Error
Range for Test 3 65
4.24 Percentage of Samples Encompassed within the Specified Error
Range for Test 4 66
4.25 Percentage of Samples Encompassed Within the Specified Error
Range for RB, FB, SB, SLB 68

xii
LIST OF SYMBOLS AND ABBREVIATIONS
ANN - Artificial Neural Network
b - Bias
CL - Creep Life
CFD - Computational Fluid Dynamic
CT - Combustion Turbine
DT - Destructive Test
EAbs, - Absolute Prediction Error Percentage
f - Function
FB - Functional-Based
FF - Fuel Flow
HP - High Pressure
HCF - High Cycle Fatigue
LCF - Low Cycle Fatigue
LCMin - Minimum Creep Life
LP - Low Pressure
MSE - Mean Squared Errors
MLP - Multilayer Perceptron
NDT - Non-Destructive Test
P3 - Compressor Outlet Total Pressure
P15 - Power Turbine Outlet Total Pressure
PCN - Relative Compressor Rotational Speed
R - Regressions
RB - Range-Based
SB - Sensor-Based
SLB - Sensor Life-Based

xiii
SP - Shaft Power
Tm - Metal Temperature
T3 - Compressor Outlet Total Temperature
T12 - Power Turbine Inlet Temperature
T15 - Power Turbine Outlet Total Temp
TET - Turbine Entry Temperature
TMF - Thermal-Mechanical Fatigue
W - Weight
Z - Targeted parameter
z^ - Output Parameter
σ - Applied Stress
UTHM - University Tun Hussein Onn Malaysia

Chapter 1
Introduction
1.1 Introduction to Gas Turbines
In the history of energy conversion, however, the gas turbine is relatively new. The
first practical gas turbine used to generate electricity ran at Neuchatel, Switzerland in
1939, and was developed by the Brown Boveri Company. The first gas turbine
powered airplane flight also took place in 1939 in Germany, using the gas turbine
developed by Hans P. von Ohain. In England, the 1930s‟ invention and development
of the aircraft gas turbine by Frank Whittle resulted in a similar British flight in
1941[1].
The name "gas turbine" is somewhat misleading, because to many it implies a
turbine engine that uses gas as its fuel. Actually a gas turbine (as shown
schematically in Figure1.1) has a compressor to draw in and compress gas (most
usually air); a combustor (or burner) to add fuel to heat the compressed air; and a
turbine to extract power from the hot air flow. The gas turbine is an internal
combustion (IC) engine employing a continuous combustion process. This differs
from the intermittent combustion occurring in Diesel and automotive IC engines.

2
Figure 1.1: Schematic for a) an Aircraft Jet Engine; and b) a Land-Based Gas
Turbine.[1]
Because the 1939 origin of the gas turbine lies simultaneously in the electric
power field and in aviation, there have been a profusion of "other names" for the gas
turbine. For electrical power generation and marine applications it is generally called
a gas turbine, also a combustion turbine (CT), a turbo shaft engine, and sometimes a
gas turbine engine. For aviation applications it is usually called a jet engine, and
various other names depending on the particular engine configuration or application,
such as: jet turbine engine; turbojet; turbofan; fanjet; and turboprop or prop jet (if it
is used to drive a propeller). The compressor combustor- turbine part of the gas
turbine is commonly termed the gas generator [1].
The advance of gas turbine engines and the increase in fuel efficiency over
the past 50 years relies on the development of high temperature materials with the
performance for the intended services. The cutaway view of an aero engine is shown
in Figure1.2. During the service of an aero engine, a multitude of material damage
such as foreign object damage, erosion, high cycle fatigue, low cycle fatigue,

3
fretting, hot corrosion/oxidation, creep, and thermo mechanical fatigue will be
induced to the components ranging from fan/compressor sections up front to high
pressure (HP) and low pressure (LP) turbine sections at the rear.
Figure1.2: Cutaway view of the Rolls-Royce Trent 900 Turbofan Engine. [2]
The endurance of the gas turbine engine to high temperature is particularly
marked by the creep resistance of HP turbine blade alloy. Figure 3 shows the trend of
firing temperature and turbine blade alloy capability[2]. Since 1950, turbine bucket
material temperature capability has advanced approximately 850°F/472°C,
approximately 20°F/10°C per year. The importance of this increase can be
appreciated by noting that an increase of 100°F/56°C in turbine firing temperature
can provide a corresponding increase of 8% to 13% in output and 2% to 4%
improvement in simple-cycle efficiency. Advances in alloys and processing, while
expensive and time-consuming, provide significant incentives through increased
power density and improved efficiency.

4
The increases in bucket alloy temperature capability accounted for the
majority of the firing temperature increase until the 1970s, when air cooling was
introduced, which decoupled firing temperature from bucket metal temperature.
Also, as the metal temperatures approached the 1600°F/870°C range, hot corrosion
of buckets became more life-limiting than strength until the introduction of
protective coatings. During the 1980s, emphasis turned toward two major areas:
improved processing to achieve greater bucket alloy capability without sacrificing
alloy corrosion resistance; and advanced highly sophisticated air-cooling technology
to achieve the firing temperature capability required for the new F generation of gas
turbine. The use of steam cooling to further increase combined-cycle efficiencies will
be realized in the 1990s [3].
The state-of-the-art turbine blade alloys are single crystal Ni-base super
alloys, which are composed of intermetallic γ‟ (Ni3Al) precipitates in a solution-
strengthened γ matrix, solidified in the [100] crystallographic direction. Turbine disc
alloys are also mostly polycrystalline Ni-base super alloys, produced by wrought or
powder metallurgy processes. Compressor materials can range from steels to
titanium alloys, depending on the cost or weight-saving concerns in land and aero
applications. Coatings are often applied to offer additional protection from thermal,
erosive and corrosive attacks. In general, the advances in gas turbine materials are
often made through thermo mechanical treatments and/or compositional changes to
suppress the failure modes found in previous services, since these materials
inevitably incur service-induced degradation, given the hostile (hot and corrosive)
operating environment.

5
Figure1.3: Increase of Firing Temperature with Respect to Turbine Blade Alloys
Development. [3]
Therefore, the potential failure mechanisms and lifetimes of gas turbine
materials are of great concern to the designers, and the hot-section components are
mostly considered to be critical components from either safety or maintenance points
of view. Because of its importance, the methodology of life prediction has been
under development for many decades. [3]
As the firing temperatures are increased and the operating cycles become
more complicated, the traditional approaches are too costly and time-consuming to
keep up with the fast pace of product turn-around for commercial competition. The
challenges in life prediction for gas turbine components indeed arise due to their
severe operating conditions:
High mechanical loads and temperatures in a high-speed corrosive
Erosive gaseous environment.
The combination of thermo mechanical loads and a hostile environment may
induce a multitude of material damages including low-cycle fatigue, creep,
fretting and oxidation.

6
Gas turbine designers need analytical methods to extrapolate the limited
material.[2].
The attempt to signified the traditional process have been done by Abdul
Ghafir[4] via soft computing technique to develop an alternative performance-based
creep life estimation method that is able to provide a quick solution to creep life
prediction while at the same time maintaining the achieved accuracy and reliability
as that of the model-based method. Using an artificial neural network, the existing
creep life prediction sub processes and secondary inputs are „absorbed‟ into simple
parallel computing units that are able to create direct mapping between various gas
turbine operating and health conditions or gas path sensors and creep life. As his
work has shown promising outcomes, it is the intention of this project to complete
his work and look for any opportunity to improvement.
1.2 Problem Statement
In depth blade life estimation takes place in the design stage, current model-based
creep life estimation methods have become more and more complicated and
therefore demand huge amounts of work and significant amount of computational
time [10, 11, 12,13]. For this reason, there are used to find an alternative solution that
can reduce complexity of the estimation creep life, to be able to perform rapid
computation and more accurate, also reduce the cost of design.
1.3 Project Objectives
Its measurable objectives are as follows:
a) To study the effects of different operating conditions on component creep life
consumption for a selected turbine engine.

7
b) To construct an alternative neural-based creep life estimation model that
enables a direct link between the gas turbine operating conditions and the
components‟ corresponding life.
1.4 Project Scope
This project is primarily concerned with the creep life estimation, the scopes of this
project are:
a) Creep deformation is only considered in the research component of the life
assessment.
b) The component that‟s they studied is high pressure turbine blade.
c) ANN is used to construct the alternative creep life estimation model where
the reduction of the complexity will be done at a macro level.
d) A turbo shaft engine performance model is used to show the application of
the alternative creep life estimation method.

Chapter 2
LITERATURE REVIEW
2.1 Common Failure in the Gas Turbine Hot Section
The failure of metal parts is a complex phenomenon that depends on material,
temperature, deformation, and the rate at which strain is applied. When a metal
component breaks, two major questions need to be answered; what are the modes of
the failure and what is the origin of the damage; hence examination of the „how‟ is
essential to understand the deterioration phenomena [4].
When gas turbine hot section components are being operated at extreme
operating conditions, several damage mechanisms such as fatigue, high temperature
corrosion/oxidation, and creep deformation will inevitably emerge. The presence of
such mechanisms will cause the component to lose its ability to sustain its intended
function, increase its life consumption rate, and to some extent, will cause the
component to fail prematurely [4].

9
2.1.1 Fatigue
Fatigue, broadly speaking, is caused by repetitive loads that produce fluctuations in
the components‟ stress, hence if large enough, will cause the component to fail even
though the . Is much lower than that required for failure on single load application.
Consequently, it will lead to crack initiation and propagation which ends with a
fracture.
Fatigue, in this context, can be either mechanical or thermal-mechanical
fatigue (TMF). Mechanical fatigue is a failure occurring under cyclic loading which
is, for example, caused by vibration. on turbine blades during gas turbine start-stop
cycle and power change. Mechanical fatigue can be further divided into two: high
cycle fatigue (HCF), and low cycle fatigue (LCF). The distinction between them is
where the repetitive application of load is taking place. HCF is categorised by high
frequency and low amplitude elastic strain. An example of HCF will be when the
turbine or the compressor blade is subjected to repeated bending, such as when the
blade passes behind a stator vane, hence emerges into the gas path which will bend
the blade due to high velocity gas pressure. This will force the blades to vibrate and
the excitation at some point will match the blade‟s resonant frequency causing the
amplitude of vibration to increase significantly LCF on the other hand is categorized
by low frequency and high amplitude plastic strain. When dealing with LCF, the
yield limit of the material is often exceeded and the material becomes plastic;
therefore, repetitive plastic deformation is the main cause of LCF. Although there is
no distinct border between the two types of failure, the traditional approach is to
classify failures as HCF and those occurring below that value as LCF , TMF on the
other hand occurs when the component is not only exposed to cyclic loads but is also
experiencing variations in temperature gradient, resulting in significant thermal
expansion and contraction. According to Jacobsson, turbine blade cooling which is
used to lower the turbine blade‟s temperature will induce high temperature gradients
between the blades high and cold regions thus generating σ, and during service, the
effect of variation results in TMF [4]

10
2.1.2 High Temperature Corrosion/Oxidation
Both turbine and compressor are exposed to aggressive corrosive and oxidizing
conditions that may be caused by several factors [14]:
a. Ingested air which contains sodium and chloride in the form of salt from the sea or
from runaway de-icing treatment or marine environments.
b. Atmospheric contaminants resulting from pollutions from industry or forest fires
which usually contain sulphur and sodium.
c. Volcanic activity which can generate significant levels of pollutants particularly
sulphur.Gaseous combustion products which contain elements such as sulphur,
vanadium or even lead and bromine from fuel at higher temperatures.
Although the blades have a protective coating, corrosive and oxidation
attacks are unavoidable, especially when the blades are exposed to sufficiently
contaminated surroundings or too much harmful fuel element [4].
2.1.3 Creep Deformation
Creep is a time dependent, thermally assisted deformation caused by prolonged high
operating temperatures coupled with constant mechanical loading (below the yield
stress of the material). Creep will cause the gas turbine hot section components to
„stretch‟ or elongate. Taking turbine blades for example, in the event of severe creep
deformation, the physical shape of the blades will change and hence can no longer
function properly. In addition, the elongation will cause the blades to be in contact
with the casing, causing the blades to fracture and finally lead to engine failure.
Figure 2.1 depicts several deformed turbine blades under creep attack. Note that the
blades have already lost their original features at the tip, indicating a severe creep
attack.

11
Figure 2.1: Deformed Turbine Blades Under Creep Attack. [4]
Although different materials have different strengths to resist creep
deformation, it can generally be said that creep becomes significant when the
homologous temperature (ratio between the material temperature and its melting
temperature) is more than 0.5 but it can be in the range of 0.4 to 0.6.
2.2 CREEP LIFE ESTIMATION APPROACHES
When a hot section component is put into service and operates at a creep regime, its
life will be consumed progressively as shown in Figure 2.2. This is due to the fact
that both the deformation and fracture are becoming time-dependent. The rate of
useful life consumption will depend on the ability of the material to resist creep
deformation and also the gas turbine operating condition. The more volatile the
operating condition, the faster the material will be degraded thus the quicker the
useful life will be consumed.

12
As the material degrades progressively, micro-cracks will start to initiate on
the surface and will propagate. According to Betten et al., the influence of micro-
cracks on creep behavior begins even at the primary stage and the cracks become
visible at the tertiary creep stage when the linkage of blunted micro-cracks into
macro-crack occurs. The macro-cracks will propagate before the final creep fracture
takes place [4].
Figure 2.2: Life span of hot section component due to creep deformation. [4]
There are several methods for estimating creep life. In general, these methods
can be classified into four broad approaches [4]:
a. Model-Based approach
b. Service-Based approach,
c. Statistical/Probabilistic-Based approach.
d. Soft Computing approach
It is important to note that in later sections of this thesis, some of the works related to
the life estimation of turbine blades will be given for each approach. Nevertheless
some works relating to the life estimation of other components are given as well.

13
2.2.1 Model-Based Approach
The model-based approach involves empirical, analytical or numerical model
creation in order to calculate the component‟s creep life. Depending on how the
model is created, external sources are needed to accompany the estimation such as
the component‟s geometrical, material data, and engine operating and health
conditions [4]. According to Wood [15], non-destructive test (NDT) and destructive
test (DT) should be carried out using conventional techniques when the life fraction
is greater than 0.5 (50%).
The model-based approach can further be classified into two sub-approaches
which are the total life approach and the damage tolerance approach. In the total life
approach, the life span of the component is predicted prior to the failure of the
component or at the time failure occurs. On the other hand, the damage tolerance
approach focuses on modeling the crack initiation and propagation processes. It is
important to note that in this section; only the total life approach will be discussed
since the development of the author‟s integrated creep life prediction model is based
on this approach [4].
Creep life estimation using the total life approach can be done by using either
a life-based model, a strain-based model, or a damage-based model.
2.2.2 Service-Based Approach
The service-based approach involves damage evaluation and remaining life
assessment of the service exposed component, which requires direct access to the
components. The present status of the component‟s material is positioned within the
standard scatter band either by measuring its properties, hence providing a refined
prediction or direct assessment of the extent of the damage experienced by the
component as a result of actual service exposed [4].

14
The main methods of assessing the remaining life will involve both
nondestructive tests (NDTs) and destructive tests (DTs).
2.2.3 Statistical / Probabilistic Approach
Although a statistical approach has been partially used in some of the approaches,
most of the approaches used statistics in order to assist the model development which
in general is deterministic in nature.
In a statistical/probabilistic approach, statistical/probabilistic theory is used as
the main lifing method. This approach is used either as a means to substitute the
existing model, or as a means to account for uncertainties in the influencing
parameters or variables that will affect the creep life behavior, or to provide the basis
of performing failure risk analysis [4]
2.2.4 Soft Computing Approach
Although the model-based and service-based approaches have been successfully used
over the years, limitations and complexity of the approaches have driven researchers
to use another form of creep life estimation approach. For this reason, soft computing
techniques such as ANN, fuzzy logic and evolutionary algorithm have been used.
Among these soft computing approaches, ANN has been predominantly used. In this
section some of the works which involve the application of ANN in creep modeling
and life prediction will be given [4].
15
2.3 Artificial Neural Network
2.3.1 Introduction to Artificial Neural Network
In recent years, neural computing has emerged as a practical technology with
successful applications in many field [17] such as in image processing and computer
vision, signal processing, medicine, military systems, financial systems, power
systems [18], material science etc. ANN has evolved from a biologically inspired
layer network connected by neurons into various categories of computational models
with different algorithms and a large variety of architectural design [19].
A Neural Network is a powerful data-modelling tool that is able to capture and
represent complex input/output relationships. The motivation for the development of
neural network technology stemmed from the desire to develop an artificial system
that could perform "intelligent" tasks similar to those performed by the human brain.
Neural networks resemble the human brain in the following two ways:
A neural network acquires knowledge through learning.
A neural network's knowledge is stored within inter-neuron connection
strengths known as synaptic weights [16].
An artificial neural network is a massively parallel distributed processor made up
of simple processing units (neurons), which has the ability to learn functional
dependencies from data.

16
2.3.2 Advantages of Neural Networks
Adaptive learning: An ability to learn how to do tasks based on the data
given for training or initial experience.
Self-Organization: An ANN can create its own organization or
representation of the information it receives during learning time.
Real Time Operation: ANN computations may be carried out in parallel,
and special hardware devices are being designed and manufactured which
take advantage of this capability.
Fault Tolerance via Redundant Information Coding: Partial destruction of
a network leads to the corresponding degradation of performance. However,
some network capabilities may be retained even with major network damage
The procedure used to perform the learning process is called a learning
algorithm, the function of which is to modify the synaptic weights of the network in
an orderly fashion to attain a desired design objective.
Each neuron is a simple processing unit which receives some weighted data,
sums them with a bias and calculates an output to be passed on the function that the
neuron uses to calculate the output is called the activation function. Typically,
activation functions are generally non-linear having a "squashing" effect. Linear
functions are limited because the output is simply proportional to the input.
The manner in which the neurons of a neural network are structured is
intimately linked with the learning algorithm used to train the network. The most
common architecture is the multilayer perceptron (MLP). These networks are a feed
forward network where the neurons are structured in one or more hidden layers. Each

17
perceptron in one layer is connected to every perceptron on the next layer; hence
information is constantly "fed forward" from one layer to the next.
By varying the number of nodes in the hidden layer, the number of layers,
and the number of input and output nodes, one can classify points in arbitrary
dimensional space into an arbitrary number of groups.
2.3.3 Neuron Model
The multilayer perception neural network is designed from simple components.
Initially, we will describe a single input neuron which is then extended to include
multiple inputs. Next, these neurons will be stack together to produce a layer [16].
Finally, a number of layers are cascaded together thus forming a multilayer network.
Single-input neuron: A single-input neuron is shown in Figure 4.22. The
scalar input p is multiplied by the scalar weight "W" to form "Wp", one of the terms
that are sent to the summer. The other input, "1", is multiplied by a bias "b" and then
passed to the summer. The summer output "n" often referred to as the net input, goes
into a transfer function "f" which produces the scalar neuron output (sometimes
"activation function" is used rather than transfer function and offset rather than bias).

18
Figure 2.3: Single Input Neuron. [16]
From Figure 2.3, both "w" and "b" are both adjustable scalar parameters of
the neuron. Typically the transfer function is chosen by the designer and then the
parameters "w" and "b" will be adjusted by some learning rule so that the neuron
input/output relationship meet some specific goal. The transfer function in Figure
4.22 may be a linear or nonlinear function of n. A particular transfer function is
chosen to satisfy some specification of the problem that the neuron is attempting to
solve. Figure 2.4 shows some common transfer functions.

19
Figure 2.4: Some Common Transfer Functions.[16]
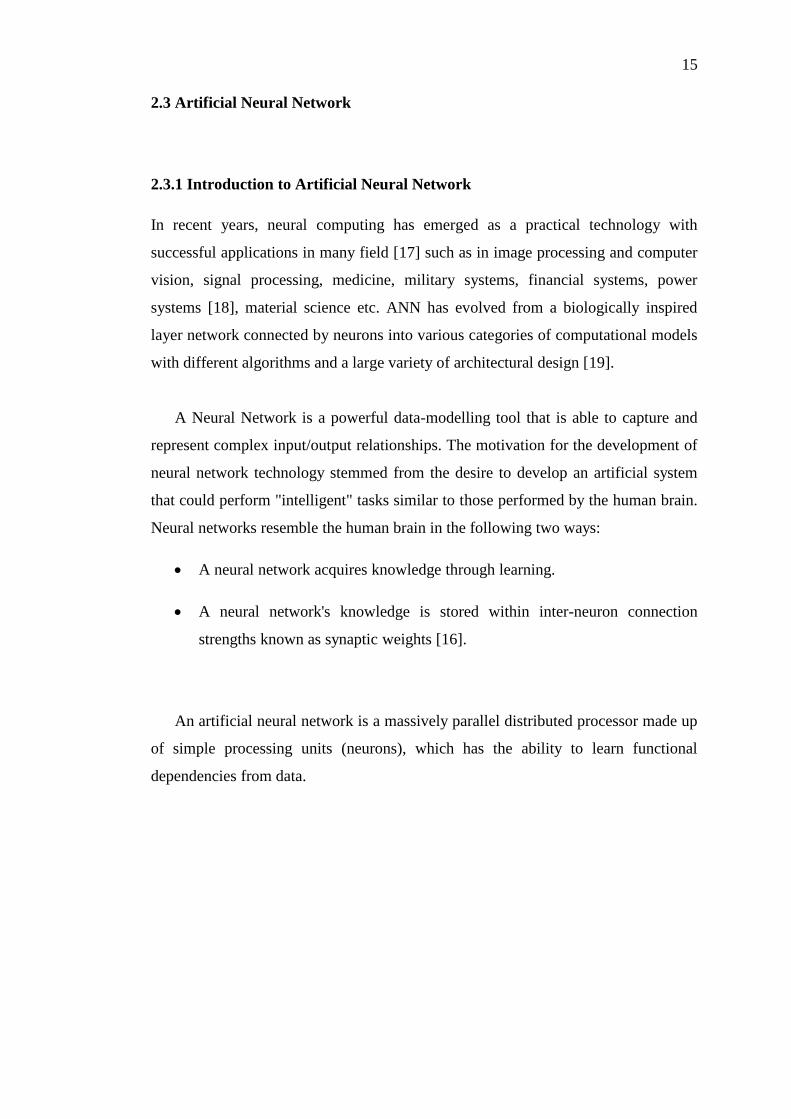
Multiple-input neuron: Typically, a neuron has more than one input. A
neuron with R inputs is shown in figure 2.5. The individual inputs 1 2p , p p g are
each weighted by corresponding elements 1,1 1,2 1,RW 燱 , .W of the weight matrix
"W". The neuron has a bias "b", which is summed with the weight inputs to form the
net input "n":
1,1 1 1,2 2 1,R Rn =W p +W p +... +W p + b (2.1)
20
This expression can be written in matrix form as:
n = Wp + b (2.2)
Figure 2.5: Multiple-Input Neuron. [16]
A particular convention in assigning the indices of the elements of the weight
matrix has been adopted [16]. The first index indicates the particular neuron
destination for the weight. The second index indicates the source of the signal fed to
the neuron. Thus, the indices in "1,1W " say that this weight represents the connection
to the first (and only) neuron from the second source [16]. A multiple-input neuron
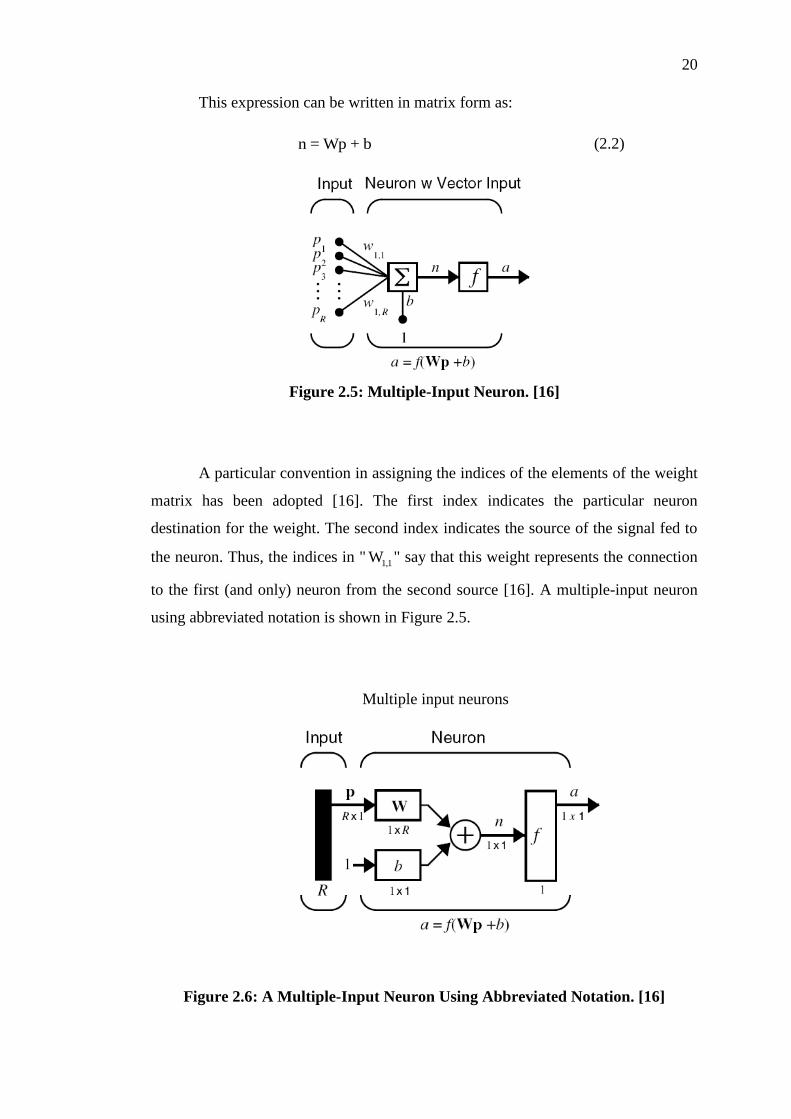
using abbreviated notation is shown in Figure 2.5.
Multiple input neurons
Figure 2.6: A Multiple-Input Neuron Using Abbreviated Notation. [16]

21
As shown in Figure 2.6, the input vector "p" is represented by the solid
vertical bar at left. The dimensions of "p" are displayed below the variable as "Rx1",
indicating that the input is a single vector of "R" elements. These inputs go to the
weight matrix "W", which has "R" columns but only one row in this single neuron
case.
A constant "1" enters the neuron as an input and is multiplied by a scalar bias
"b". The net input to the transfer function “f” is "n", which is the sum of the bias "b"
and the product "Wp". The neuron's output is a scalar in this case. If there exit more
than one neuron, the network output would be a vector [16].
2.3.4 Multilayer Perceptron Network Architectures
Generally in the most application one neuron, even with many inputs, may not be
sufficient. We might need five or ten, operating parallel, in what we will call a
“layer". This concept of a layer is discussed below.
A layer of neurons: A single-layer network of "S" neurons is shown in
Figure 2.7. Note that each of the "R" inputs is connected to each of the neurons and
that the weight matrix now has s rows.
Figure 2.7: A Single-Layer Network of S Neurons. [16]

22
The layer includes the weight matrix, the summers, the bias vector " b ", the
transfer function boxes and the output vector " a ". Each element of the input vector "
p " is connected to each neuron through the weight matrix "W". Each neuron has a
bias ib , a summer, a transfer function f and an output " ia ". Taken together, the
outputs form the output vector "a ". It is common for the number of inputs to a layer
to be different from the number of neurons (i.e. R S). The input vector elements
enter the network through the weight matrix "W":
1,1 1,
,1 ,
R
S S R
w w
w
w w
(2.3)
The row indices of the elements of matrix "W" indicate the destination
neuron associated with that weight, while the column indices indicate the source of
the input for that weight. Thus, the indices in "3,2W " say that this weight represents
the connection to the third neuron from the second source. The S-neuron, R-input,
one-layer network also can be drawn in abbreviated notation as shown in Figure 2.8.
Figure 2.8: Layer of S Neurons, Abbreviated Notation. [16]
Here again, the symbols below the variables tell that for this layer, "p" is a
vector of length "R", "W" is an "S*R" matrix and " a " and " b " are vectors of length
"S". As defined previously, the layer includes the weight matrix, the summation and

23
multiplication operations, the bias vector " b ", the transfer function boxes and the
output vector.
Multilayer perceptron (MLP): Considering a network with several layers,
each layer has its own weight matrix "W", its own bias vector "b", a net input vector
"n" and an output vector " 2a ". Some additional notation should be introduced to
distinguish between these layers. Superscripts are used to identify these layers. The
number of the layer as a superscript is appended to the names for each of these
variables. Thus, the weight matrix for the second layer is written as 2w . This
notation is used in the two-layer network shown in Figure 2.9.
There are "R" inputs, " 1S " neurons in the first layer, " 2S " neurons in the
second layer, etc. The output of layers one and two are the inputs for layers two and
three. Thus layer 2 can be viewed as a one-layer network with R= 1S inputs, S= 2S
neurons and an 1S * 2S weight matrix 2W . The input to layer 2 is 1a and the output is
2a . A layer whose output is the network output is called an output layer. The other
layers are called hidden layers [16].
Figure 2.9: Three Layer Network. [16]

24
The network shown in Figure 2.9 has an output layer (layer3) and two hidden
layers (layers 1 and 2). Figure 2.10 shows abbreviated notation of multilayer
network.
Figure 2.10: Abbreviated Notation of Multilayer Network. [16]
The network learns about the input through an interactive process of adjusting
the weights and the bias. This process is called supervised learning and the algorithm
used is the learning algorithm. One of the most common is the error back
propagation algorithm. This algorithm is based on the error-correction learning rule,
based on gradient descent in the error surface.
Basically, a set of cases, with the corresponding targets, is given to the
network. The input data is entered into the network via the input layer and is
processed through the layers - forward pass. Then, the output is compared to the
expected output (the targets) for that particular input. This results in an error value.
This error value is back propagated thought the network, against the direction of the
weights. The weights and bias are adjusted to make the actual response of the
network move closer to the desired response in a statistical sense, figure 2.11 shows
Back propagation of error.

71
REFERENCES
1. Lee S. Langston, University of Connecticut and George Opdyke, Jr.,
Dykewood Enterprises “Introduction to Gas Turbines for Non- Engineers,”
Published in the Global Gas Turbine News, Volume 37: No. 2, 1997.
2. Xijia Wu, Institute for Aerospace Research, National Research Council
Canada “Life Prediction of Gas Turbine Materials,” Published in the 2009.
3. P.W. Schilke, GE Energy Schenectady, NY. “Life Advanced Gas Turbine
Materials and Coatings Materials,” 2004.
4. M. F. Abdul Ghafir , Scholl of Engineering Gas Turbine” Performance Based
Creep Estimation For Gas Turbines Application” 2011.
5. J. Bolton, A “Characteristic-Strain” Model for Creep ECCC Creep
Conference, 12–14 September 2005, London.
6. G. Marahleh, A. R. I. Kheder, and H. F. Hamad, Department of Materials and
Metallurgical Engineering, Faculty of Engineering, Al-Balqa Applied
University, Al-Salt, Jordan. “Creep-Life Prediction of Service-Exposed
Turbine Blades” Vol. 42, No. 4, pp. 49–53, July–August, 2006.

72
7. Mehdi Tofighi Naeem, Seyed Ali Jazayeri, Nesa Rezamahdi, K. N. Toosi
University of Technology “Failure Analysis of Gas Turbine Blades” 2008.
8. Yasmina Assoul, Samira Benbelaid, Vera Sijacki-Zeravcic, Gordana Bakic,
Milos Dukic, Faculty of Engineering, University Saad Dahleb Blida, Algeria
“Life Estimation of First Stage High Pressure Gas Turbine” 2008.
.
9. Muhammad Naeem, College of Aeronautical Engineering (CAE), National
University of Sciences & Technology (NUST) “Implications of day
temperature variation for an aero-engine‟s HP turbine-blade‟s creep life-
consumption” 2009.
10. B. Meherwan P., “9-Axial-Flow Turbines,” in Gas Turbine Engineering
Handbook (Third Edition), Burlington: Gulf Professional Publishing, 2006.
11. D.M Knowles, “Gas Turbine Assist Management Research”Gas Today, 2008.
12. F. J. Cunha, M. T. Dahmer, and M. K. Chyu, “Thermal-mechanical life
prediction system for anisotropic turbine components,” Journal of
Turbomachinery, vol. 128, pp. 240-250, 2006
13. E. Marcus, “A Parametric Physics Based Creep Life Prediction Approach to a
Gas Turbine Blade Conceptual Design” Georgia Institute of Technology,
Atlanta, Georgia 2008.
14. T.J.Carter “Common Failures in Gas Turbine Blades” Engineering Failure
Analysis, 2005.
15. M. Wood, “Gas Turbine Hot Section Life Assessment and Extension Status
and Issues” OMMI, 2004.
16. Neural Network Design Martin T. Hagan, Howard B. Demuth, Mark H.
Beale – 1996.

73
17. C.M Bishop, Neural Networks for Pattern Recognition, 1st ed. Oxford
University Press, USA, 1996.
18. H.K.H Bhadeshia, “Neural Network in Materials Science,” ISIJ
Internationall, vol. 39, no. 10, pp. 966-979, 1999.
19. J.Schumann, Applications of Neural Networks in High Assurance System
Springer, 2010.


















