Fuzzy Model for Truck Allocation in Surface Mines
8
Fuzzy Model for Truck Allocation in Surface Mines Prof. Kazem Oraee & Bahareh Asi University of Tarbiat Modarres, Tehran, Iran 1 1 INTRODUCTION From the middle 1980s optimization of truck allocation has been considered as a significant issue for increasing productivity and reducing operating costs of loading and haulage system in open pit mines. There are several models for truck allocation. Used of these models in the mines results an increase in production of about 5 to 12 percent [1]. These systems are usually based on mathematical programming models, which are used to determine a short-term mining plan for achieving production and quality targets set by management. The goal of this research is to optimize several factors simultaneously. Goal programming is able to analyze such situation where numeric goal are in contrast with each other. In this case, allocation of equipment is carried out in such away that pro- duction volume increases to its highest level while maintaining the idle grade of ore required by the processing plant. 2 MODELS OBJECTIVES The most important factor in every mining operation is profitability. Productivity of mining component is an important Determinate of profit- ability. Profitability can be increased by optimiza- tion of equipment in used. Therefore the first goal in this model is to maximizing productivity and hence increased production, which in turn will result in cost reduction. Goal programming is one of the many models that have been developed to deal with multiple objec- tives decision-making problems. The basic approach of goal programming is to establish a specific nu- meric goal for each of the objectives, formulate an objective function for each goal, and then seek a solution that minimizes the weighted sum of deviations of these objective functions from their respective goals [2]. In metalliferous mine the ore grade dispatch to the crusher is important and therefore in this paper in it will constitute the second target. 3 MODEL CONCEPTS Different algorithms exist for solving a goal programming model. In this paper Desirability Function approach is used, where, the degree of importance in each goal is recognized by attaching ABSTRACTS: In this paper, the model introduced in a previous work has been adopted as the basis. Several modifications have been applied to this, in order to produce a new model with enhanced applicabillity. It is then argued that, in practice, the daily output expected from a mechanical shovel is subject to variations caused by technical, operational and environmental factors. A model that uses fuzzy numbers for this impor- tant parameter would therefore optimize the process more realistically than those that are based on random numbers derived from probability distributions. Fuzzy logics have therefore been introduced into the model. The model was finally tested in Sarcheshmeh copper mine of Iran. It is concluded that, with an improved truck allocation system, prescribed by the model, the total output of the mine will increase by 15%. The ore received by the processing plant would also have grade values that have lower deviations from the ideal grade value. Key words: Optimization, Truck Allocation, Goal Programming, Fuzzy Operating Research, Open Pit Mine
-
Upload
jose-gregorio-freites -
Category
Documents
-
view
36 -
download
1
description
http://www.oraee.net/shenase/Portals/0/FUZZY.pdf
Transcript of Fuzzy Model for Truck Allocation in Surface Mines

Fuzzy Model for Truck Allocation in Surface MinesProf. Kazem Oraee & Bahareh Asi University of Tarbiat Modarres, Tehran, Iran
1
1 INTRODUCTION From the middle 1980s optimization of truck
allocation has been considered as a significant issue for increasing productivity and reducing operating costs of loading and haulage system in open pit mines. There are several models for truck allocation. Used of these models in the mines results an increase in production of about 5 to 12 percent [1]. These systems are usually based on mathematical programming models, which are used to determine a short-term mining plan for achieving production and quality targets set by management.
The goal of this research is to optimize several factors simultaneously. Goal programming is able to analyze such situation where numeric goal are in contrast with each other. In this case, allocation of equipment is carried out in such away that pro-duction volume increases to its highest level while maintaining the idle grade of ore required by the processing plant.
2 MODELS OBJECTIVES The most important factor in every mining
operation is profitability. Productivity of mining component is an important Determinate of profit-ability. Profitability can be increased by optimiza-tion of equipment in used. Therefore the first goal in this model is to maximizing productivity and hence increased production, which in turn will result in cost reduction.
Goal programming is one of the many models that have been developed to deal with multiple objec-tives decision-making problems. The basic approach of goal programming is to establish a specific nu-meric goal for each of the objectives, formulate an objective function for each goal, and then seek a solution that minimizes the weighted sum of deviations of these objective functions from their respective goals [2].
In metalliferous mine the ore grade dispatch to the crusher is important and therefore in this paper in it will constitute the second target.
3 MODEL CONCEPTS
Different algorithms exist for solving a goal programming model. In this paper Desirability Function approach is used, where, the degree of importance in each goal is recognized by attaching
ABSTRACTS: In this paper, the model introduced in a previous work has been adopted as the basis. Several modifications have been applied to this, in order to produce a new model with enhanced applicabillity. It is then argued that, in practice, the daily output expected from a mechanical shovel is subject to variations caused by technical, operational and environmental factors. A model that uses fuzzy numbers for this impor-tant parameter would therefore optimize the process more realistically than those that are based on random numbers derived from probability distributions. Fuzzy logics have therefore been introduced into the model. The model was finally tested in Sarcheshmeh copper mine of Iran. It is concluded that, with an improved truck allocation system, prescribed by the model, the total output of the mine will increase by 15%. The ore received by the processing plant would also have grade values that have lower deviations from the ideal grade value.
Key words: Optimization, Truck Allocation, Goal Programming, Fuzzy Operating Research, Open Pit Mine

2
coefficient determined by AHP1 approach or experience of expert people.
Dimensions of different goals may not be the same. This will make mathematical operation impossible. The objective function in this model must therefore have goals in it, that is characterize by common dimension or be without dimension. In this paper attempt are made to make goals dimensionless.
4 FUZZY UNCERTAINTY When data used in the model are accurate the
results produce are similar to real situations. In certain circumstances where accurate data are not available, Fuzzy models and probabilistic models are appropriate tools for programming. Probabilistic models in stochastic situations and Fuzzy models when uncertain data are used. Micholapoulos & Panagiotou [3] present a probabilistic model for truck allocation. They related the shovel output to a stochastic parameter and also used probabilistic distribution function for prediction of the values.
In this paper, Fuzzy models are used for optimizing haulage system in open pit mines. For maximization of production, the haulage capacity demands from shovels must be satisfied since the shovel output is the primary determinant of the production system. In most situations, several adverse condition such as weather, presents of water in the working faces etc may limit the possibility of determining the objective function and constraints.
Fuzzy sets are used to insert shovel production values in the model and hence make it closer to reality. In this research, goal programming is combined with fuzzy constraint technics in such way that fuzzy constraints are converted to accurate constraints. In fuzzy approach, whenever the parameters are less accurate variation range is more spread and decision-making become more complicated and risky. Therefore this kind of model is named fuzzy goal programming model.
Problems whose decision making parameters are not exact can be solved by fuzzy programming. Since the 1980 decades, fuzzy logic has been ap-plied increasingly in the field of the operations re-search, management science and expert systems. There are several approaches for solving fuzzy pro-gramming problems. Lai et al. [4] suggested an ap-proach for solving linear programming problem with sources as non-exact constraints which data are as-sumed as triangular fuzzy numbers. One of the disadvantages of this approach is that for each fuzzy number, there is only one exact answer.
1 Analytic Hierarchy Process
In this paper, an alternative method based on α-cuts of constraints is present to the possibilistic linear programming problems. To do so, after determining the α-cuts, the resulted intervals are substituted by bounded variables. Then, a non-linear programming problem is converted to a linear programming problem.
5 FUZZY GOAL PROGRAMMING MODEL FOR OPTIMIZING HAULAGE SYSTEM IN OPEN PIT MINES Modeling is the process of simulation of real
world problem to quantitative models. Whilst solving the model is none a complicated procedure, the most important depth is making the appropriate model. A quantitative model is a structure that connects the inputs (controllable and uncontrollable variables, constraints and parameters) to the outputs (criteria values that are defined by goal function).
5.1 Variables and Parameters of model Sets, decision variables, technical parameters, fuzzy parameters, complementary parameters, auxiliary parameters are introduced. Sets: i sources(shovels) j destinations(dumps/crushers) k ore quality h truck type Decision variables: Xijh feed quantity to assign from source i to destina-tion j per shift by truck h Technical variables: ns number of shovels nos number of ore shovels nxs number of oxide shovels nls number of low grade ore shovels nd number of destinations nc number of crushers nxd number of oxide dumps nld number of low grade ore dumps nq types of ore quality nh number of truck types Mi maximum output from shovel i per hour Cj maximum available capacity of dump/crusher j
per hour Rl prescribed lower limit of stripping ratio Ru prescribed upper limit of stripping ratio Htijh average travel time of shovel i to destination j
by truck h Djh average dumping time at destination i by truck h SDjh average spotting time at destination i by truck h

Rjih average traveling time from crusher/dump j to shovel i by truck h
Sih average loading time at source i by truck h SSih average spotting time at source i by truck h Nh number of truck h Th weighted average payload of a truck h Gik value of ore quality k at source i Qkj target value of ore quality k at crusher j Lkj prescribed lower limit of ore quality k at
crusher j Ukj prescribed upper limit of ore quality k at
crusher j Wt hours per shift
piO pessimistic output from shovel i per hour miO normal output of shovel i per hour oiO optimistic output of shovel i per hour
Fore least required ore production per hour Fwaste least required waste production per hour Fuzzy Parameter
iO~ out put of shovel i per hour
Complementary Parameters 1W priority factor for production goal
2
α confidence level specified by the decision maker
W priority factor for quality goal
Auxiliary Parameters di
+ positive deviational variable for output of shovel i
di- negative deviational variable for output of
shovel i Ckj
+ positive deviational variable of ore quality k at crusher j
Ckj- negative deviational variable of ore quality k at
crusher j yjih empty truck capacity to assign from destination
j to source i by truck h For the above variables the following non-negative constraint holds.
0,,,,, ≥−+−+kjkjiijihijh ccddyx
5.2 Fuzzy Production maximization goal
The first goal of model is to maximize the systems production. Production maximizing has a direct relation with the shovels production. Since the shovel’s production is related to some factors such as rock type, exploration quality, existence of water in working faces and weather conditions, therefore It
is not possible to count on this factor as a crisp parameter in the model.
Therefore the parameters related to the shovel productivity average are assumed as triangular fuzzy numbers. The head angle of triangular fuzzy number shows the state that the parameter value is completely crisp. In other word, it has a number 1 membership in the set. Reduction of the membership degree means that by the increases of the uncertainty of the parameters value, in a linear way. The value on the right corner of the triangle is the optimistic limit of these parameters when the membership degree is zero and where the uncertainty is high. In such cases the variation range of shovels’ production is the vastest possible range. In this situation mentioned model is converted to fuzzy model.
In this paper, α-cut [5] utility is used to make the model defuzzy. This approach has the ability to calculate the goal function with different membership degree rate in the method that is based on the membership degree rate of parameters to a fuzzy set (uncertainty of the decision maker). The fuzzy goal can be calculated to exact variable range. Bounded goal of shovel’s production is defined as loaded rock rate from each shovel to different sources with different trucks, which is less than the production average of that shovel. This constraint is shown in equation (1). A fuzzy linear constraint can be stated as follow:
i
n
h
n
jijh Ox
h d ~1 1
≤∑∑= =
(1) sni ,...,2,1=
Since the shovel production average is a fuzzy number, then triangular fuzzy parameters of shovel’s production is shown in equation (2) as follows:
),,(~ oi
mi
pii OOOO = (2)
Where, iO~ may be uncertain values with fuzzy distribution.
Equation (1) is converted to equation (3) by substi-tuting fuzzy numbers of the shovel production.
),,(1 1
oi
mi
pi
n
h
n
jijh OOOx
h d
≤∑∑= =
(3) sni ,...,2,1=
α-cuts concept is used to crisp the constraints. With regards to uncertainty rate from shovel production rate in every shift, it is possible to draw different α-cuts. For each cut, the upper and lower limit of the variation ranges are distinguished. The parameter related to each shovel production is shown in figure 1 with the concept of α-cut in the form of fuzzy number.
3

4
+O : Upper limit of variation range in shovel’s production
−O : Lower limit of variation range in shovel’s production
Figure 1- Shovel production parameter in the form of trian-
gular fuzzy number with α-cuts. Equation (3) is converted to equation (4) by substituting alternatives rate.
[ ]oi
mi
pi
mi
n
h
n
jijh OOOOx
h d
)1(,)1(1 1
αααα −+−+≤∑∑= =
sni ,...,2,1= (4) Then Wi is defined as a variable in following interval
. ],[ +− OONote that these coefficients are stated as intervals.
This implies that equation (4) involves treating a nonlinear problem and hence, cannot be treated by standard methods without further transformation. Equation (5) can be made linear as follow:
[ ]oi
mi
pi
mii OOOOW )1(,)1( αααα −+−+∈
sni ,...,2,1= (5)This is equivalent to a parametric programming,
when [ ]1,0∈α is a parameter. With the use of pa-rametric programming the fuzzy model in equa-tion (1) is converted to a crisp linear parametric pro-gramming problem. It is noted that for each value of α , we have an optimal solution. Therefore the solu-tion with α grade membership is actually fuzzy. We can now provide the decision maker with a solution table bearing different values for α in the range 0-1.
By substituting the new variable, Wi, equation (4) can be written as:
i
n
h
n
jijh Wx
h d
≤⇒∑∑= =1 1
(6)sni ,...,2,1=
Both negative and positive components of the deviation values from the goal are used in constraint (7). This is because it is desirable to allocate haulage capacity on required basis in order to avoid both shovels idle periods or truck waiting times. Constraint (7) describes the production maximization goal, and demonstrates the stochastic nature of the truck/shovel system operations.
iii
n
h
n
jijh
oi
mii
pi
mi
Wddx
OOWOOh d
=−+
−+≤≤−+
+−
= =∑∑
1 1
)1()1( αααα
sni ,...,2,1= (7)
Equations (8), (9), (10) and (11) show goal constraint related to shovels that load ore, oxide, low grade ore and waste respectively:
oi
mii
pi
mi OOWOO )1()1( αααα −+≤≤−+ (8)
iii
h
h
n
jijh Wddx
n c
=−+ +−
= =∑∑
1 1 osni ,...,2,1=
oi
mii
pi
mi OOWOO )1()1( αααα −+≤≤−+ (9)
iii
h
h
nn
njijh Wddx
n xdc
c
=−+ +−
=
+
+=∑ ∑
1 1
osxsos nnni += + ,...,1
oi
mii
pi
mi OOWOO )1()1( αααα −+≤≤−+ (10)
iii
n
h
nnn
nnjijh Wddx
h ldxdc
cxd
=−+ +−
=
++
++=∑ ∑
1 1
osxslsosxs nnnnni ++++= ,...,1
oi
mii
pi
mi OOWOO )1()1( αααα −+≤≤−+ (11)
iii
n
h
n
nnnjijh Wddx
h d
cxdld
=−+ +−
= +++=∑ ∑
1 1
sosxsls nnnni ,...,1+++=
5.3 Ore quality goal
Goal constraint of the ore (dispatched in to crusher) quality is in the form that goal object is determined by its right hand side variable. It is necessary to determine the positive and negative deviated variables for the goal of ore quality in equation (12).
∑∑∑∑= =
+−
= =
=−+h osh os n
h
n
iijhkjkjkj
n
h
n
iikijh xQCCGx
1 11 1
..
cnj ,...,2,1=qnk ,...,2,1=
(12)
5.4 Constraints
The haulage capacity allocated to each shovel should be less than the shovel’s maximum capacity

of production. This is fulfill by following deterministic constraint.
i
n
h
n
jijh Mx
h d
≤∑∑= =1 1
(13) sni ,...,2,1=
Additionally, the deterministic constraint equation (14), ensures that the haulage capacity allocated to a certain destination is less than its capacity.
j
n
h
n
iijh Cx
h s
≤∑∑= =1 1
(14)dnj ,...,2,1=
Constraints in equations (15) and (16), maintenance the balance of the haulage capacity flow at each source and destination node of the haulage network respectively.
∑∑==
=dd n
jijh
n
jjih xy
11 (15)
h
s
nhni
...,2,1,...,2,1
==
∑∑==
=ss n
ijih
n
iijh yx
11 (16)
h
d
nhnj
,...,2,1,...,2,1
==
In order to meet the required stripping ratio, constraint in equation (17) is defined.
Un
h
n
i
n
jijh
n
h
n
ni
n
njijh
L Rx
xR
h os c
h s
os
d
c ≤≤
∑∑∑
∑ ∑ ∑
= = =
= += +=
1 1 1
1 1 1 (17)
Note that the sources and the destinations are ordered in such a way that ore sources and crushers respectively, are numbered first. Finally, constraint in equation (18) ensures that the total production of shovels does not exceed the available trucks or the production target.
∑ ∑∑∑∑∑∑∑∑∑∑= = =
hhi j
jiihjihih1 11=
5
== == == =
++++dc dc ds d
i
n nn
j
n
jijhjih
n
i
n
jijhjh
n
i
n
jijhjh
n
i
n
jijhijh NWtySSySyRxSDxDxHt
111 11 11 1..≤
s s ddn
T
(18) hnh ,...,2,1=Constraints in equations (19) and (20) fulfill the least required production per shift.
∑ ∑ ∑= += +=
≥h s
os
d
c
n
h
n
ni
n
njijh Fwastex
1 1 1
(19)
Forexh os cn
h
n
i
n
jijh ≥∑∑∑
= = =1 1 1 (20)
Constraints in equations (21) and (22) limit the quality deviations of ore dispatched to crushers with a prescribed range of acceptable values.
∑∑= =
− −≤h osn
h
n
iijhkjkjkj xLQC
1 1
)( (21) c
q
nj
nk
,...,2,1
,...,2,1
=
=
∑∑= =
+ −≤h osn
h
n
iijhkjkjkj xQUC
1 1
)( (22) c
q
nj
nk
,...,2,1
,...,2,1
=
=
5.5 Objective function
The objective function is to minimize the sum of the deviations from the goals, which are volume and quality of the ore produced. In order to devise the objective function, the undesirable deviation values are minimized. For instance, in the case of the first target, maximization of mine output, positive deviations from the goal are not desirable. Therefore for this goal, the sum of only negative deviations is maximized. As for the second goal, the sum of both positive and negative deviations must be minimized. Equation (23) presents the general structure of the objective function in which goals have been allocated appropriate weighted coefficient according to their importance.
( ) ( )),()( 2211+−− += cchWdhWMinZ (23)
Since the production and ore quality goals in the objective function have different dimensions, an exact answer cannot be obtained model. In order to be able to compare the goals, they must be made dimensionless. In this model, utility function is used to normalize the objective function. The equation (24) shows the exact structure of the new objective function.
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ ++⎟
⎟⎠
⎞⎜⎜⎝
⎛= ∑∑∑
= =
−+
=
− q cc n
k
n
j kj
kjkjn
i i
i
C
ccW
dd
WMinZ1 1
21
1 (24)
21
1
2)( ⎥⎦
⎤⎢⎣
⎡= ∑
=
dn
jijhi ad
h
s
nhni
,...,2,1,...,2,1
==
21
1
2)( ⎥⎦
⎤⎢⎣
⎡−= ∑
=
osn
ikjikkj QGC
c
q
nj
nk
,...,2,1
,...,2,1
=
=
kjC : Norm of the deviation vector from goal quality
id : Norm of the deviation vector from goal production
ijh : Coefficients of the decision variable in goal constraints a
With the use of different α and weighted coefficient values the optimum decision for the allocation of resources in haulage system is achieved.
6 HAULAGE SYSTEM OPTIMIZATION IN SARCHESHMEH COPPER MINE The case study of this model is Sarcheshmeh cop-
per mine of Iran. In this mine, truck-shovel system is used for ore and rock transportation. The mine is in possession of 10 shovel units and 52 trucks. Particu-lars of these machines are listed in table 2.

Tab ine le 2- Machinery available in Sarcheshmeh copper m_________________________________________
0
10000
20000
30000
40000
50000
60000
82/6/5 82/6/6 82/8/10 82/8/11 82/8/12 82/8/13
test
out p
ut
Actual outputModel Output
machine model number capacity _________________________________________ shovel P&H 8 9 m3 shovel P&H 2 14 m3 truck Wabco 32 120 ton truck Dresser 20 120 ton _________________________________________
As it is shown in table (2), the capacity of wabco
trucks is 120 tons, but these 32 trucks were bought 28 years ago and therefore cannot operate with their full capacity. In most cases the maximum payload on these trucks does not exit 90 tons. The 20 Dresser trucks are about 12 years old and the maximum useful capacity of each truck is about 110 tons. Therefore to adapt the model to these conditions, the real capacity of the trucks, i.e. 90 and 100 tons, are used.
6
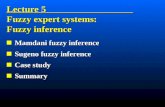
The model was tested in 6 days in sarcheshmeh copper mine. The analysis a calculation for test carried out in one of these days is explained here. In all the 6 tests the production values obtain from the model were higher than the mine real production. Figure 2 shows the general operations in Sarcheshmeh copper mine.
Figure 2- schematic view of Sarcheshmeh copper mine
6.1 Testing the model in Sarcheshmeh copper mine
Output volumes obtained from optimizing the
model and those produced in the mine are showing in the figure 3. It is shown that the output values obtained from the model are higher than those produced by the fixed dispatching system in the mine.
That trucks allocation with regards to model output is more that actual production by fixed dispatching in mine.
6.2 Possible transportation paths in Sarcheshmeh copper mine
Possible paths for truck allocation in Sarcheshmeh copper mine is like figure 4.
Figure 3- Out put volumes from the model versus actual output
Figure 4- Possible haulage routes in Sarcheshmeh copper mine
As it is shown in figure 4, more than 80 methods
exist for trucks allocation. After running the model trucks travel optimized path is obtained for achiev-ing mine objectives in different planning periods. This is shown in figure 5.
Figure 5- Optimized haulage paths from model in Sarcheshmeh copper mine

6.3 The results of optimization model in Sarcheshmeh
Haulage system optimization model was been tested in Sarcheshemeh copper mine several times. Results obtained show that according to the model out put, tucks allocation increases production by 15.39 percent.
6.4 Analysis of Fuzzy shovel production parameters
In this section, rate of mine production is considered with regards to the uncertainty of shovel production. Since the output produced by the shovel is uncertain, therefore a triangular fuzzy number has been given to this parameter. The number on the triangular represents the average shovel production whilst those on the right and left corner show the optimistic and pessimistic limits respectively. Optimistic limit of shovel production based on job efficiency of 90%, fill factor of 95% is calculated to be 2200 tons per hour. Pessimistic limit of shovel production based on least favorable conditions such as undesirable blasting, adverse weather conditions, water present in working faces are worked out to be about 450 tons per hour.
Experience, familiarity with the system, local knowledge and many other factors help the decision maker to estimate shovel production rate with high degree of confidence. The coefficient production in the fuzzy model and system production rate, both with different membership degrees (α), based on different quantitative weights of goals model, are shown in figure 6. According to this figure, whenever uncertainty rate of the shovel production is higher (α is nearer to zero), the range produced by the model is wider and the decision taken in this way is more risky. On other hand, whenever the parameters are more crisp and hence the member-ship degree is nearer to one, the decision will be taken more exact.
The results of testing the model shows that it can
provide the required grade of crusher while produc-tion rate increases by about 16 percent. Shovel pro-duction parameter is taken in fuzzy form because of uncertainty of data. α-cut concept has been used to defuzzy the shovel production parameter rate.
7
Figure 6- Mine production variations with different quantita-tive weight
7 SENSITIVITY ANALYSIS Sensitivity analysis on the model shows that the
production rate is most sensitive to the number of hours worked per shift, truck capacity, number and the traveling times of the trucks. As regards the quality of ore dispatched to processing plant, the most effective factors are shown to be the number of trucks and the deviation in the estimated quality of ore.
8 CONCLUSIONS
In this paper a model is presented that can optimize haulage system by using fuzzy sets in special circumstances where the data available for decision making are uncertain. The ability to optimize the mineral haulage system that includes different types of trucks is one of the important virtues of the model. Also the model can be used in processing plants with several production lines. In other words, the model has the capability of dis-patching ore with different grades to several crush-ers. Up to a maximum of 4 different types of ore and waste can be considered by the model.
In situations where a shovel is in contact between two different types of rocks, the model can be programmed in a way that the shovel loads from both types of the rocks. With regards to above in-formation, the model is called Fuzzy goal program-ming model for optimizing the haulage system in open pit mines.
The case study in the paper is Sarcheshmeh copper mine. Haulage system optimizing model has been tested in Sarcheshmeh copper mine several times and its validity was verified.
Whenever α is near zero the range produced by the model is wide and therefore the decision hence taken is associated with high risk. On the other hand, whenever the production parameter rate is more ex-act, the membership degree is nearer to one, the de-cision taken is more certain.

8
9 REFERENCES
[1] Howard L. Hartman & Jan M. Mutmansky, In-troductory to mining engineering, 2002, 2nd ed, John wiley & sons, USA. [2] Agharpour, Mohamad javad, Multiple Criteria Decision making, 2002, 2th ed, Tehran university, Iran. [3] Micholapoulos T.N. & Panagiotou G.N., “Truck Allocation using Stochastic Goal Programming”, 2001, MPES, pp. 965-970 [4] Lia, Y.J. and C.L. Hwang, A New Approach to Some Possibilistic Linear Programming Problem, Fuzzy Sets and Systems 49, 1993. [5] Saati, S., Memariani, A., Jahanshahloo, G.R., Possibilistic Programming with Trapezoidal Fuzzy Numbers”, 2000, Elsevier Science, Mathematics & Computer Science, Amsterdam