Fuzzy logic in control systems: fuzzy logic controller. II ...

of 28
Upload
iamjithinjoseCategory
view
227download
07/27/2019 fuzzy logic in automobiles
1/28
INKT H E C O M P U T E R A P P L I C A T I O N S J O U R N A L
Constantin von Altrock
Fuzzy Logic in
Automotive Engineeringtive advantage is soon commonly used.In this article, Ipoint to case stud- ies in antilock braking systems (ABS), engine control,
and automatic gearbox control. I show how superior perfor- mance is achieved via fuzzy-logicIssue 88 November 1997 1Circuit Cellar INK
7/27/2019 fuzzy logic in automobiles
2/28
and neural-fuzzy design techniques. I also discuss development methodologies, tools, and
code speed/size require- ments.
Automotive engineering is one
area where fuzzy logic has
made significant inroads.
Constantin brings us up to date
with the latest developments.
He examines fuzzy logics
impact on ABS braking, engine
control systems, transmissions,and antiskid steering.
uzzy logic is
apowerful way
toput
engineering
expertise into
products in a short
amount oftime. Its highly
beneficial in automotive
engineering, where
many system designs involve
the expe- rience ofdesign
engineers as well as test
drivers.
fOver the past years, fuzzy
logic hasbecome is a common
design technology in Japan,
Korea, Germany, Sweden,
and France. The reasons aremanifold.
First, control systems in
cars are complex and involve
multiple param- eters.
Second, the optimization ofmost systems is based on
engineering exper- tise rather
than mathematical models.
Good handling,
Fahrvergngen, and riding
comfort are optimization
goals that cant be defined
mathematically.
Third, automotive
engineering is competitive on
an international scale. Atechnology that proves a
competi-
Issue 88 November 1997 2
Circuit Cellar INK
2Issue 88 November 1997Circuit Cellar INK
7/27/2019 fuzzy logic in automobiles
3/28
ABS WITH FUZZY LOGIC
In 1947, Boeing
developed the first ABS for
airplanes as a mechanical
system. Today, ABS isstandard equip- ment on
most cars. A
microcontrollerand
electronic sensors
measure the speed of every
wheel and control the fluid
pressure for the brake
cylinders.
Mathematical models for
a carsbraking system exist,
but the interaction of the
braking system with the road
is far too complex to model
adequately. Hence, todays
ABS contains the engi-neering experience of years
oftesting
in different roads and
climates.
PRODUCING FUZZY ABS
Because fuzzy logic is an
efficient way to put
engineering knowledge into
a technical solution, its no
surprise that many ABS
applications are already on the
market. Currently, Nissan
and Mitsubishi ship cars with
fuzzy ABS. Honda, Mazda,Hyundai, BMW, Bosch,
Mercedes-Benz, and Peugeot
are work- ing on solutions as
well.
ABS also benefits from
fuzzy logics high
computational efficiency.
During a control loop time of
25 ms, the con- trollers mustfetch all sensordata, pre-
Issue 88 November 1997 3Circuit Cellar INK
7/27/2019 fuzzy logic in automobiles
4/28
Road Condition
Optimum Slack (s)
Dry 0.2Slippery or Wet
0.12Ice or Snow
0.05
Table 1The slack value for
maximum brake effect depends on
the road condition.
process it, compute the ABS
algorithm, drive the bypass
valves, and conduct the test
routines. Any additional
function thus has to be
computationally efficient.Most ABS systems use 16-
bit con- trollers, which can
compute a medium size
fuzzy-logic system in about
0.5 ms, using only about 2-KB
ROM space [1]. You can check
out a comparison of
computing times offuzzy-
logic systems on differentmicrocontrollers [2].
BRAKING BASICS
There are different ways in
which fuzzy logic is used in
ABS design. The
implementation of
Nippondenso [3] that I
present exhibits an
intelligent combination ofconventional tech- niques
with fuzzy logic.
Lets first discuss some
basics ofthebraking process.
If a wheel rotates exactly as
fast as it corresponds to the
speed of the car, the wheel has
nobraking effect at all. If the
wheel doesnt rotate at all, itisblocked.
Theblocking situation has
two dis- advantages. First, a
carwith blocking wheels is
hard to steer. Second, the
brake effect is not optimal.
The point ofoptimum
brake effect isbetween
these two extremes.The speed difference
between the car and the
wheel during braking is
called slack. Its
definition is:
However, the point of
maximumbrake effect
depends on the type ofroad.
Table 1 lists typical values.
ROAD SURFACE
Conventional ABS controlsthebypass valves of the brake
fluid so the slack equals a set
value. Most manu- facturers
program this set value to a
slackof 0.1, which is a good
compro- mise for all road
conditions.
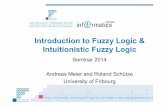
But, as Figure 1 and Table 1
show, this set value is not
optimal forevery road type. By
knowing the road type, the
braking effect can be enhanced
further.
So, how do you determine
what the road type is? Asking
the drivertopush abutton on
the dashboardbefore an
emergency brake is not
feasible.
Sensors provide one logical
alterna- tive. Many companies
have evaluated different types
ofsensors and concluded that
sensors which delivergood
road- surface identification are
too expensive or not
sufficiently robust.
However, consider sitting ina carequipped with a standard
ABS. Afterdriving at a known
speed, you could jam on the
brake so the ABS starts to
work.
Even if you didnt know
what the road surface was like,
you could make a good guess
from the cars reaction. If adrivercan estimate the road
surface
7/27/2019 fuzzy logic in automobiles
5/28
from the cars reaction, fuzzy
logic can implement the same
ideas into the ABS.
Nippondenso did exactly
this. When the ABS first
detects the wheel block- ing, it
starts to control the brake-fluid valves so each wheel
rotates with a slackof0.1.
The fuzzy-logic system thenevalu-
ates the reaction of the car to
the brak- ing and estimates
current road surface.
Considering this estimate,
the ABS corrects the set
value for the slack to
achieve the best braking
effect in the interval from s =
0.05 tos = 0.2.
The fuzzy-logic system
only uses input data
stemming from the existing
sensors of the ABS. Such
input variables are
deceleration and speed of the
car, deceleration and speed ofthe wheels, and hydraulic
pressure of the brake fluid.
These variables indirectly
indi- cate the current
operation point ofthe
braking and itsbehaviorover
time.
Experiments show that a
first proto- type withjust sixfuzzy-logic rules improves
performance significantly.
On a test track alternating
from snowy to wet roads, the
fuzzy ABS detected the road-
surface changes even during
braking.
A FUZZY BRAKE?
Due to the highcompetition in this area,
most manufacturers are
reluctant topublish any
details about the tech-
nologies they use. The cited
applica- tion only shows
results from an experimental
fuzzy-logic system. The
details about the finalproduct arent published.
Also, some carmakers
(especially in the U.S.) worry
about the negative con-
notation of the word fuzzy.
Since it implies imprecision
and inexactness,
manufacturers are afraid that
drivers may thinka fuzzyABS is inferior. Others are
threatened by the possibil- ity
of a suit in which a clever
lawyersuggests to a laymans
jury that a fuzzy-
logic ABS is somethinghazard-
ous.
s
=V
ca
r
V
w
he
el
V
carwher
es is
slack
(bet
ween
0 [no
braki
ng]
and 1
[bloc
king]
), Vwheelis thecars
velocity,
and V
is thewhee
lsveloc
ity.Fig
u C
DryR
o
a
d
WetR
o
a
d
7/27/2019 fuzzy logic in automobiles
6/28
In J
= 0,
the
whee
ls
speed
equals the
cars.
In the
case
ofs =
1, the
whee
l
blocks
comp
letely
.
The
curve
s
show
that
the
opti
mum
brake
effect
lies
be-
twee
n
these
two
extre
mes.
SnowyRoad
0S
00.250.50.751
Figure 1This
plot illustrates
brake effect
over the wheel
slack s for dry,
wet, and snowy
road surfaces.( is the friction
coefficient, or
measure of
brake effect.)
In
Ger
ma
ny,
on
theoth
er
han
d,
the
con
cept
s of
fuzzine
ss
and
engi
neer
ing
maste
rpiec
e do
not fit
toget
her
well
in the
publi
c
perce
ption.
Henc
e,
most
manu
factur
ers
7/27/2019 fuzzy logic in automobiles
7/28
usingfuzzylogicinABShidethefact.
segment ofassembly code in
a microcontroller. Once
implemented, who can tell
that this code contains fuzzy
logic?
Temperature of
Coolant
Vacum inAirIntake
O2Concentrationin
Exhaust
InjectionAmount
(FuzzyLogic)
Fuel Injection
When many publications
about fuzzy logic appeared for
the first time about
fiveyearsago,evenreputedscientists
(FuzzyLogic)
Determination ofIgnitionTiming
Ignition Timing ElectronicIgnition
andprofessors in the U.S.stated thatfuzzy logic shouldntbe usedforcritical applications. Theyclaimed that itproducesinherently instable systems.
KnockSensor
Angle ofCran
kshaft
(FuzzyLogic)
Ignition
This attitude is truly shameful. TheyFigure 2As you can see, the engine controller of NOK Corporation containsthree fuzzy-logic modules.
demonstrated only that they
did not understand what
fuzzy logic is about.
A fuzzy-logic system is a
time invari- ant,
deterministic, and nonlinear
sys- temnothing fuzzy
about that. Such systems are
already known and applied in
control engineering, and
conventional stability theory
covers them well [4].
In the case of a fuzzy ABS,
stability isnt even an issue.
Conventional ABS was
considered stable for any
slack set value in the
interval from 0.05 to 0.2.
Hence, a fuzzy-logic road-
surface esti- mator that tunes
this value to the opti- mumcannot make the ABS
instable.
Lets move on to see how
fuzzy logic easily
implements human
experience
in an embedded engine-control system.
ENGINE CONTROL
The control of car and truck
engines isbecoming
increasingly more complex
with more stringent emission
standards and constant effort to
gain higher fuel efficiency.
Twenty years ago, control
systems were mechanical (i.e.,
carbure- tor, distributor, and
breaker contact). Now,
microcontroller-based systemscontrol fuel injection and
ignition.
Since the control strategy
foran engine depends strongly
on the current operating point
(e.g., revolutions, mo-
mentum, etc.), linear control
models, (e.g., PID) are not
suitable.
7/27/2019 fuzzy logic in automobiles
8/28
Listing 1The current operation point of the engine is classified by the linguistic variable
Situation. Each linguistic term denotes a typical operation point. Because each term is
represented as a fuzzy-logic membership function, the linguistic variable can classify all other
operation points, too.
linguistic variable Situation {
Term 1: Start
Control strategy is that the cold enginetimed early, and the mix is fat;
Term 2:Idle
Control ignition timing and fuel injection dependingtemperature to ensure that the engine
Term 3: Normal drive, low or medium load
Maximize fuel efficiency by meagerknocking;
Term 4: Normal drive, high loadFat mix and early ignition to maximize performance.constraint is the permitted emission maximum;
Term 5:Coasting
On the other hand, no
mathematical model
describing the complete
behav- ior of an engine exists.
Most engine controllers use a
look-up table to repre-
sent the control strategy.
The table is generated from
the results ofextensive
testing and engineers
experience.
The generation ofsuch a
look-up table, however, isonly suitable forthree
dimensions (two inputs and
one output). Also, the
generation and inter-
pretation ofsuch tables is
difficult and considered a
black art.
Although fuzzy logic can
replace these look-up-tables,most manufactur- ers will not
publish any details on a
fuzzy-logic engine-control
solution.
This secretiveness is due to
the fact that the rules of the
fuzzy-logic system make the
entire engine-control
knowl- edge of the companycompletely trans- parent.
They are afraid competitors
will learn too much about
the solutionby
disassembling the fuzzy-
logic rules.
IDENTIFY DRIVING CONDITION
Nok andNissans case study
[5] gives the benefits of fuzzy
logic in engine control.
Figure 2 depicts the
compo- nents ofthis engine
controller, which contains
three fuzzy-logic modules.
The system first notes the
engines operational
condition by the linguistic
variable Situation. This
variable has the linguistic
terms in Listing 1.
The determination ofSituationis
a state estimation of theoperationpoint. Because
Situationis a linguis- tic
variable, more than one term
can
be valid at the same time, so
combina- tions of the
operational points canbe
expressed as definedby the
terms.
Apossible value ofSituationcould
be {0.8; 0; 1; 0; 0; 0.3}.
Linguistically, this value
represents the driving condi-
tion engine started a short
while ago,
7/27/2019 fuzzy logic in automobiles
9/28
normal drive condition at
medium orlow load, slightly
accelerating. From this
operation-point
identification, the individual
fuzzy-logic modules control
injection, fuel cutoff, and
ignition.
Like ABS, engine control
needs a very short loop time.
Some systems are as fast as 1
ms for an entire control loop.
Some manufacturers design
the system using fuzzy logic
but then translate it into a
look-up table for faster
processing.
Although a look-up table
computes faster, memory
requirements may pro- hibit
its use. A look-up table with
two inputs and one output, all8-bit resolu- tion, already
requires 64 KB ofROM.
Restricting the resolution
ofthe input variables to 6
bits each, the look- up-table
still requires 4 KB. A table
with three inputs and one
output, all inputs
6-bit resolution, requires 14MB.
Some engineers
implemented a look- up table
with a limited resolution
and used an interpolation
algorithm. How- ever, the
interpolation needs about as
much computing time as the
fuzzy- logic system itself[2].
Another published
application offuzzy logic in
engine control is an idle
control unitby Ford Motor
Corp. [6].
Next, lets checkout
automatic- transmission
control to show how
fuzzy-logic systems can
adapt theircontrol
strategy to drivers.
ADAPTIVE AUTOMATICS
When the first three-speed
automatic transmissions
appeared on the market
about 30 years ago, the
enginepower ofmost cars
was just sufficient to keepthe car in pace with traffic.
The neces- sity ofgetting
maximum momentum from
the engine determined the
shift points for the gears.
Photo 1This model
car is used in high-
speed driving experi-
ments.
Now, when
most car engines
can delivermuch
more power
than necessary to
keep the car in pace
with traffic,
automatic
transmission
systems have up to
five speeds, and
fuel efficiency hasbecome an
important issue,
controlling shift
points is much more complex.
Five speeds and higher engine
powergive the automatic-
transmission system a much
higherdegree offreedom. Driv-
ing at 35 MPH, a three-speedautomatic transmission has to
select second gear. A five-
speed transmission with apow-
erful engine can select second
gearformaximum
acceleration, third gearfor
normal driving condition, and
fourth gear forminimal
acceleration.
ACCELERATE OR SAVE FUEL
Unfortunately, the goal for
the con- trol strategy is in a
dilemma. Formaxi- mum fuel
efficiency, you want to select
the next highergear as early as
possible. But formaximum
performance, you switch to the
next highergearlater.If you have a standard shift,
you choose your strategy
7/27/2019 fuzzy logic in automobiles
10/28
depending on the traffic
condition. An automatic
gearbox has no understanding
of the traffic condition or the
drivers wishes.
However, intelligent
control tech- niques canenhance automatic trans-
missions as it is based on
experience
Photo 2The
first version of thefuzzy-logic
controller has 200
rules
in two rule
blocks. The four
left boxes
indicate input
interfaces for
sensors, the two
right boxesindicate output
interfaces for the
actuators, and
the two large
boxes in the
middle represent
fuzzy- logic rule
blocks.
and engineering knowledge
rather than mathematical
models. Fuzzy logic
thereforeproves to
efficiently imple- ment the
technology.
In 1991, Nissanintroduced fuzzy- logic
controlled automatic five-
speed transmission systems
[7, 8]. Honda followed in
1992 [9], and GM/Saturn in
1993.
The job for the fuzzy-
logic system in these
applications is similar:
avoid nervous
shifting back and forth
on winding orhilly
roads
understand whetherthe
driver wants economical
orsporty performance
avoid unnecessary
overdrive, ifswitch- ing to
the next lowergear does
not deliver more
acceleration
Figure 3 shows a typicalsituation
on a fast, winding road. With a
standard shift, youd leave it
in fourth gear,buta five-speed automatic
transmission switches
between the fourth and fifth
gears depending on the speed
of the car.
The fuzzy-logic
transmission con- troller
evaluates more thanjust
the current speed of the car. It
also analyzes how the driver
accelerates andbrakes.
To detect a winding road,
the fuzzy- logic controller
looks at the number of
acceleratorpedal changes
within aperiod. Figure 4
shows the definition of
the linguistic variableAcceleratorpedal changes. The
variance ofthe accelerator
pedal changes is input to the
fuzzy-logic controller.
Some of the rules
estimating the road and
driving conditions from
these input variables are:
7/27/2019 fuzzy logic in automobiles
11/28
Road
AcceleratorPedal
The opposite case issimi- lar. If theautomatic trans-mission detects thatthe driver acceleratescarefully and takes thefoot offthe acceleratorlong before red lights,
chances are that thedriver wants high fueleffi- ciency.
acceleration, the next logical
step is skid-controlled
steering. An antiskid steering
system (ASS) reduces the
steer- ing angle appliedby the
driver through the steering
wheel to the amount the road
can take. It optimizes the
steering action and avoids
sliding since a slid- ing car is
very difficult to restabilize,
especially fordrivers not accustomedG
ea
r
45454
WHY
FUZZYLOGIC?
to suchsituations.
Though anASSmakesa lot ofsense
Figure 3Afive-speedautomatictransmission
with fixedshift pointsalwaysswitchesbetweenfourth andfifth gear ona windingroad. A
driver with ashift
gearboxwould leaveit in fourthgear.
Thequestionremains,whydoyouneedfuzzylogictoimpleme
nttheseintelli-
from a
technic
alpoint
ofview,
such a
system
is
harder
to
market.
For anABS,
you canprove thatit never
performs
man
y
pedal
changes
wit
hin
a
peri
od
indi
cate
a fast
and
wind
ing
road
few
ped
7/27/2019 fuzzy logic in automobiles
12/28
a
l
c
h
a
ng
e
s
w
i
t
h
in
a
p
e
r
i
o
d
i
n
d
i
c
a
t
e
a
f
r
e
e
w
a
y
m
a
n
y
pe
d
a
l
c
h
a
ng
e
s
w
i
t
h
i
n
a
p
e
r
i
o
d
a
n
d
a
h
i
g
h
v
a
r
i
a
nc
e
o
f
p
e
d
a
lc
h
a
n
g
e
s
i
n
d
i
c
a
t
e
a
s
l
o
w
a
n
d
w
i
n
d
i
ng
ro
ad
m
e
di
u
m
v
a
r
i
an
c
e
o
f
p
e
d
al
c
h
a
n
g
e
s
i
n
d
i
c
a
t
e
s
a
f
a
s
t
a
n
d
w
i
n
d
i
n
g
ro
a
d
l
o
w
va
r
i
a
n
c
e
o
f
t
h
e
p
e
d
a
l
c
h
a
n
g
e
s
i
nd
i
c
a
t
e
s
a
f
r
e
e
w
a
y
T
he
inte
resti
ng
part
of
this
appl
ica-tion
is
that
the
fuzz
y-
logi
c
controll
er
uses the
driver
as the
sensor.
It inter-
prets
thedriver
s
reactio
n to the
road
and
driving
conditi
ons andadapts
the
cars
perfor
mance
accordi
ngly.
This
behaviorcould
be used
to define
an
intellig
ent
control
system.
The
technic
al
system
tries to
underst
and
whether
the
human
is
satisfied
with
its
perfor
mance
and
adapts
itselfto suit
the
needs
of the
human
using
it.
INTEL
LIGENTTRANSMISSIONS
An
other
exa
mple
of an
auto
mati
c
trans
missi
on
syste
m
curre
ntly
unde
r
deve
lopm
ent
in
Ger
man
yillust
rates
this
possi
bility
even
better.
If
driverswant to
acceler
ate,but
arent
satisfie
d with
their
cars
responce, they
uncons
ciously
push
the
pedal
down
even
morewintin
11.5s.
This
scenari
o
represe
nts the
subcon
scious
reactio
n of
most
drivers
to
unsatisf
ac- tory
acceler
ation.
Most
drivers
7/27/2019 fuzzy logic in automobiles
13/28
d
o
n
t
e
v
en
r
e
a
li
z
e
t
ha
t
t
h
e
y
li
k
e
th
e
c
ar
to
a
c
c
e
l
e
r
a
t
e
f
a
st
e
r.
I
f
a
n
au
t
o
m
a
t
i
c
t
r
a
n
s
m
i
s
s
i
o
n
s
y
s
t
e
m
i
s
c
a
p
a
b
l
e
o
f
d
e
t
ec
ti
n
g
t
h
i
s,
itc
a
n
m
o
v
e
t
h
e
s
h
if
t
p
o
i
n
t
s
h
i
g
h
e
r
t
o
a
chie
ve
mor
e
acce
lerat
ion.
gent
funct
ions?
My
answ
er:
while
you
can
use
other
tech
niqu
es to
impleme
nt
these
contr
ol
strat
egies
,
fuzzylogic
is
likel
y to
be the
most
effici
ent.
I
ntel
lige
nt
con
trol
stra
tegi
es
are
buil
t on
expe
rienc
e and
expe
rime
nts
rather
than
from
math
emat
ical
mod
- els.
Hence, a
lingu
istic
form
ulati
on is
more
effic
ient.
Th
ese
strat
egies
most
ly
invol
ve a
large
num
ber
of
input
s.
Most
of
the
inpu
ts areonly
relevant
forsome
spe-
cific
conditio
n.
Usingfuzzy
logic,
these
inputs
are only
consider
ed in the
relevant
rules,keeping
even
complex
control-
system
designs
transpar
ent.
Another
consider
ation is
that
intel-
ligent
control
strategie
s
implem
ented in
mass-
market
products
have to
be
implem
ented
cost
efficient
ly. In
com-
parison
to
conven
tional
solutions,
fuzzy
logic is
often
much
more
compu-
tational
andcode-
space
efficient
.
Lets
look
now at
how
fuzzylogic
enable
s the
design
of new
functi
onal-
ity for
autom
atic
steerin
g
contro
l.
ANTISKIDSTEERING
Activ
e
stability
control
systems
in cars
have a
long
history.First,
ABS
improve
d
braking
performa
nce by
reducing
theamount
ofbrake
force
applied
by the
driverto
what the
road
surface
can take.
This
system
avoids
skidding
and
sliding,
resulting
in shorter
braking
distance
s.
Second
,
traction-
control
systems,
which do
essential
ly the
7/27/2019 fuzzy logic in automobiles
14/28
sa
me
thi
ng
as
AB
S,im
pr
ov
e
ac
cel
era
tio
n.By
red
uci
ng
en
gin
e
po
we
r
ap
pli
ed
to
the
wh
eel
s
to
wh
at
the
roa
d
can
tak
e,
a
tra
ct
io
n
-
c
o
ntro
l
s
y
st
e
m
m
axi
m
iz
es
a
c
c
el
er
at
io
n
an
d
m
in
i
m
iz
e
s
tir
e
w
e
ar
.
Aft
er
sk
id
-co
ntr
ol
le
db
rak
in
ga
nd
worse
than
a
tradit
ional
braki
ngsyste
m.
For
an
ASS,
this
is
hard
toprove
.
Al
so,
it
may
be
diffi
cultto
sell
cars
that
tak
e
over
the
stee
ring
in
eme
r-
genc
y
situ
atio
ns.
Even
ABS
fac
ed
a
lon
g
per
iodof
rej
ect
ion
by
cus
to
me
rsbeca
use
theyfeltunea
syabou
t asyste
m
inhibitingtheirbrakeaction.
F
or
thes
e
reas
ons,
it
may
take
a
lon
gtim
e
befor
e
ASS
will
be
impleme
nted
in a
prod
uctio
n car.
All
resul
tssho
wn
in
this
secti
on
stem
from
theresea
rch
of
a
Ger
man
car
man
ufact
urer
[10].
Be-
caus
e
this
syste
m is
one
of the
most
complex
fuzzy-
logic
embedd
ed
systems
everdevelop
ed, it
effectiv
ely
demon-
strates
the
potentia
l of thetechnol
ogy.
THE TESTVEHICLE
Real
experim
ents
were
made ona
modifie
d Audi
sedan
and the
20
model
car
shownin Photo
1. In the
followin
g
discussi
on, I
only
present
the
results
derived
from
the
model-
car
experi
ments.
Amidm
ounted
1-hp
electri
c
motor
powers
the car,
rendering the
power-
to-
weight
ratio
of a
race
car.
Thissetup
enable
s the
researc
hers to
perfor
m
skiddi
ng and
sliding
experi
ments
in
extre
me
situati
ons at
high
speeds.
?
LowMediumHigh1
0 010
203040
AcceleratorPed
alChangesWithinaP
eri
7/27/2019 fuzzy logic in automobiles
15/28
od
F
i
g
u
re
4
H
e
r
e
,
dr
i
v
i
n
g
c
o
nd
it
i
o
n
i
s
c
la
s
s
if
i
e
d
u
si
n
g
a
l
i
n
g
u
i
s
t
i
c
v
a
r
i
a
b
l
e
.
T
h
e
v
a
r
i
a
b
l
e
l
i
n
g
u
i
s
t
i
ca
l
l
y
i
n
t
e
r
p
r
e
t
s
t
h
e
a
m
p
li
t
u
d
e
of
a
c
c
e
l
e
r
a
to
r
p
e
d
a
l
c
h
an
g
es
withi
n a
cert
ain
peri
od.
7/27/2019 fuzzy logic in automobiles
16/28
On dry surface, the
carreaches a velocity
of 20 MPH in 3.5 s,
with top speeds up to
50 MPH. The speed for
most experiments
ranges from 20 to
30 MPH. Each wheel
features individual
suspension and has a
separate shock
absorber. The carhas
diskbrakes and a lock-
able differential [10].
The cars controlleruses the
Position
Orientation
Ultrasound Beams
possible situation.
In a fuzzy-logic
system, every element
is self-explana- tory.
Linguistic variables are
close to the human
representa- tion of
continuous concepts.
Fuzzy if-then rules
combine these
concepts much the
same way humans do.
Fuzzy logic isnonlinear and
multiparametric by nature. So,
mother
boa
rd
of anote
boo
k
PC
connected
to aninterface
board
Figure 5Threeultrasoundsensorsguidethe
car inthetrack.
it
canbettercopew
it
hc
om
plex
controlproblemsthatar
ealso
7/27/2019 fuzzy logic in automobiles
17/28
drivi
ng
the
actu
ators
and
sensors.
Ac-
tuat
ors
are
pow
er
steer
ingservo
,
disk
brak
e
servo
, and
puls
e-
widt
h
mod
u-
lated
mot
or
cont
rol.
Se
nsors
are
three
ultra
soun
d
(US)
dista
nce
senso
rs
for
trac
king
guid
ance
(seeFigu
re 5)
and
infr
ared
(IR)
refle
x
sensors
in
each
whe
el
for
spee
d.
Thecont
rol
loop
time
fro
m
read
ing
in
sens
or
sign
als
to
setti
ng
the
valu
es
for
the
actua
tors
is
10
ms.To
meas
ure
the
dyna
mic
state
of
thecar
(e.g.,
skid
ding
and
slidin
g),
IR
sensors
meas
ure
the
indiv
idual
spee
d of
all
four
whe
els.
Eval
uatin
g
whe
el-
speed
diffe
renc
e
s
,
t
h
e
fu
z
z
y
-
l
o
g
ic
s
y
s
-
t
e
m
i
n
t
e
r
p
r
e
t
s
t
h
e
c
u
r
r
e
nt
s
i
t
u
a
t
io
n
.
T
h
r
e
e
f
i
x
e
d
-
m
o
un
t
e
d
U
S
s
e
n
s
o
r
s
m
e
a
s
u
r
e
t
h
e
di
s
t
a
n
c
e
t
ot
h
e
n
e
x
t
o
b
-
s
t
a
c
l
e
t
o
t
h
e
f
r
o
n
t
,
l
e
ft
,
a
n
d
ri
gh
t.
T
h
i
s
s
e
tu
p
p
e
r
m
it
s
au
t
o
n
o
m
o
u
s
o
p
e
r
a
ti
o
n
o
f
t
h
e
c
a
r
.L
o
w
-
c
o
s
t
s
e
n
s
o
r
s
w
e
r
e
i
n
-
t
e
n
t
i
o
n
a
l
l
y
u
s
e
d
in
t
hi
s
s
t
u
d
y
ra
t
h
e
r
th
a
n
CC
D
c
a
m
er
a
s
a
n
d
i
m
a
g
e-
re
c
o
g
ni-
tion
techn
iques
to
show
thatexpen
- sive
senso
rs can
be
replac
edby
a
fuzzy-logiccontr
ol
strate
gy.
Figu
re 6
shows
a
sample
experi
ment
involv
ing
the
model
car.
Theobsta
cle
isplaced
rightafter
thecurve
, sothe
US
sensors
ofthe
cardetecttheob-
stacle
too
late.
To
not hit
the
obstacle, the
carhas
to
decide
for a
very
rapid
turn.
Tooptimi
ze the
steerin
g
effect,
the
anti-
skid
control
ler
must
reduce
the
desired
steerin
g angle
to the
maxim
um the
road
can
take
,
avoi
ding
both
slidi
ngand
hitti
7/27/2019 fuzzy logic in automobiles
18/28
ng
the
obst
acle
.
MODELBASEDVS.FUZZYLOGIC
In
theory,
you can
build a
mecha
nicalmodel
for a car
and
derive
a
mathe
mati-
cal
modelwith
differe
ntial
equati
ons to
imple
ment a
model-
based
control
ler.
In
reality,
the
compl
exity
ofthis
ap-
proach
is
overw
helmi
ng,
and
the
result-
ingcontro
ller
would
be
diffic
ult to
tune.
He
re isthe
poin
t for
fuzzy
logic
:
race-
car
drivers
can
cont
rol a
car
in
extr
eme
situa
tion
s
very
well
with
out
solvi
ng
diffe
renti
al
equat
ions.
Henc
e,
there
must
be analtern
ative
way
for
anti-
skid
steeri
ng
control.
This
alterna
tive
way is
to
represe
nt the
drivingstrateg
y in
engine
ering
heurist
ics.
Althou
gh
there
are
multip
le ways
of
expres
sing
engine
ering
heuris-
tics,
fuzzy
l
o
g
i
c
ha
s
p
r
o
v
e
n
v
e
r
y
e
f
f
e
c
-
t
i
v
e
f
o
r
t
h
e
f
o
l
lY
contra
st
other
metho
dsexpres
sing
if-
then
causal
ities
(e.g.,
expert
syste
ms),
the
comp
utatio
n
fuzzy-
logic
syste
m
quanti
tative
rather
than
symb
olic.
fuzzy-
logic
system,
use
few
rules
to
press
gener
al
situations,
and
then
the
fuzzy-
logic
algo-rithm
deducesdecisionsfor
n
o
n
li
n
e
ar
a
n
d
in
v
ol
v
em
ul
ti
pl
e
p
ar
a
m-
et
e
rs
.
A
n
d
fi
n
al
ly
,
fu
zz
y
lo
gi
c
ca
n
b
e
e
f
f
i
-
c
i
e
n
t
l
y
i
m
p
l
e
m
e
nt
e
d
i
n
e
m
b
e
d
d
e
d
c
o
n
t
ro
l
a
p
pl
ic
atio
ns
.
E
ve
n
on
a
sta
n
d
ar
d
m
ic
ro
co
nt
ro
ll
er
,
a
fu
zz
y-
lo
gi
c
s
y
st
e
m
ca
n
outpe
rform
a
comp
arable
conve
n-tional
soluti
on
both
by
code
size
and
computing
speed.
DESIGNANDIMPLEMENTATION
Pho
to 2
shows
the
first
versio
n ofa
fuzzy-
logic
contro
ller
for the
car.
The
object
ive for
this
contro
ller
was
auton
o-
mou
s
guid
ance
of the
car in
thetrack
at
slo
w
spe
ed,
wh
ere
noski
ddi
ng
an
d
sli
din
g
yetocc
urs
.
In
Phot
o 2,
the
lowe
rrule
bloc
k
uses
the
dista
nces
mea
sure
dby
thethre
e US
senso
rs to
deter
mine
the
steering
angle.
The
upper
rule
block
imple
ment
s asimpl
e
speed
contr
ol by
using
the
dista
nce to
the
next
obsta
cle
meas
ured
by the
front
US
senso
r and
the
speed
of one
front
wheel
only.
Due
to the
slow
7/27/2019 fuzzy logic in automobiles
19/28
speed
s, no
skiddi
ng or
slidin
g
occurs. All
wheel
speed
s are
the
same.
Th
is
firstversi
on
of
the
fuzz
y-
logi
c
controll
er
cont
aine
d
abo
ut
200
rule
s
and
took
only
a
few
hou
rs to
impl
e-
me
nt.
T
he
sec
on
dver
sio
n of
the
fuz
zy-
logi
c
contr
oll
er
im
ple
me
nts
a
more
co
mp
lex
fuz
zy
sys
te
m
for
dy
na
mi
c
sta
bili
ty
co
ntr
ol. It
incl
udes
antil
ock
brak
ingas
well
as
tract
ion
and
antiski
dsteering
control (seePhoto
3).Thi
s600-rulefuzzy-logic
controllerhastwostages ofthefuzzyinference.Thefirst
stage,representedbythethreeleftruleblocks,estimates
the
Figure 6
In
this
examp
le
of
a
n
e
x
p
eri
m
e
nt
,
th
e
c
ar
sul
tr
a
s
o
u
n
d
s
en
s
or
s
wi
ll
d
et
e
ct
th
e
o
b
st
a
cl
e
pl
a
ce
d
t s
t
a
t
e
va
r
i
a
b
l
e
s
o
f
t
h
e
c
ar
s
d
y
n
a
m
i
c
s
i
t
u
a
ti
o
n
f
r
o
m
s
e
n
s
o
r
d
at
a
.
T
h
e
t
w
o
l
o
w
e
r
r
u
l
e
b
l
o
ck
s
e
s
t
i
m
at
e
s
k
i
d
d
i
n
g
7/27/2019 fuzzy logic in automobiles
20/28
and sliding states from
speed sensor signals,
while the upperrule
block estimates the
carsposition and
orien- tation in the
test track.
Note that theoutput of
the left three rule blocks
Development
System (PC)Serial Link
Real-Time
OnlineCode
Communication
Manager
OnlinePar
Changes
system was
modified on- the-
fly for
optimization.
The fuzzy-logic
code is separated
into two seg-
ments. One
contains all static
partscode that
doesnt need to be modi-
t
h
e
st
a
t
e
v
a
r
i
a
b
l
e
e
s
t
i
m
a
-
t
i
o
n
is
Pre
DC
Dynamic
C
odeB
7/27/2019 fuzzy logic in automobiles
21/28
f dmatedstateofthe
carcanth
erefor
ebe
the
positionisratherleft
,
whil
ethe
orienta-
P(
S(
thecodecon
tainingm
e
m
b
e
r
sh
i
p
f
u
n
c
t
i
on
s
o
f
t
he
l
i
n
g
u
i
s
t
i
c
v
a
rtionisstron
glytotheright,andth
ecarskidsovertheleft
Figure
7The
fuzzyT
ECH
Online
Edition
feature
s both
visualiz
ation of
runnin
g
system
and
modific
ations
on-the-fly.
in
fe
re
nce
st
ruc
t
ure,
a
nd
th
er
ule
s.
frontw
heel.
T
he
se
co
nd
sta
ge,re
pr
e
s
en
t
e
d
b
y
t
h
et
h
re
e
right
rul
e
bl
oc
ks,
us
es
thes
e
e
s
t
i
m
a
ti
o
n
s
a
s
i
np
u
t
s
t
o
de
t
e
r
m
i
n
e
t
h
e
b
e
s
t
c
o
n
t
r
o
l
a
ct
i
o
n
f
o
r
t
h
a
t
d
r
i
v
i
n
g
s
i
t
u
a
t
i
o
n
.
T
h
e
u
p
p
e
r
r
u
le
b
l
o
c
k
d
et
e
r
-
m
i
n
e
st
h
e
s
t
e
e
r
i
n
g
a
n
g
l
e
,
t
h
e
m
i
d
d
le
on
e
th
e
e
n
g
i
ne
p
o
w
e
r
to
b
e
a
p
p
li
e
d,
a
nd
thelo
w
er
o
neth
eb
rak
e
for
ce
.S
u
c
h
a
t
wo
-
s
t
a
g
e
co
n
t
r
o
l
s
t
r
a
t
e
g
y
i
s
s
i
m
il
a
r
t
ot
h
e
h
u
m
a
n
be
h
a
v
i
o
r.
It
f
i
r
s
t
a
n
a
l
y
z
e
s
t
h
e
s
it
u
ati
on
and
then
dete
r-
min
esthe
acti
on.
It
also
allo
ws
for
efficient
opti
miz
atio
n,
sinc
e the
tota
l
of
600
rule
struc
tures
in six
rule
bloc
ks
can
be
desig
ned
and
opti
mize
d
inde-
pend
ently
.
T
he
firs
t
ver
sion
of
the
co
ntr
oll
er
wa
sonl
y
abl
e to
gui
de
the
car
onau-
ton
om
ou
s
cru
ise
(se
e
Ph
oto
2).
Th
e
sec
on
d
ver
sio
n
also
succ
eed
ed
to
dy-
namicall
y
stab
ilize
the
cars
crui
se
via
7/27/2019 fuzzy logic in automobiles
22/28
ABS,tractioncontrol, andASS(see
Photo3).
Ho
wever
, this
versio
n
requir
ed a
muchlonger
desig
n time
before
the
result
s were
compl
etelysatisfa
ctory.
The
secon
d
versio
n also
uses
advan
ced
fuzzy-
logic
techno
logies
such
as
FAM
infere
nce
[11]
and
the
Gam
ma
aggre
gatio
nalopera
tor
[12].
ONLINEDEVELOPMENT
Thedevel
opm
ent of
the
fuzzy
-
logic
syste
mused
the
fuzzy
TEC
H
softw
are
prod
uct
[11].
Give
n the
graph
ical
defi-
nitio
n of
the
syste
m
structu
re (cf.
Photo
s 2 and
3), the
lingui
sticvariab
les,
and the
rule
bases,
fuzzyT
ECHs
com-
pilergenera
tes the
syste
m as C
or
assem
bly
code.
Thiscodewas
implementedon a
PC
board
moun
ted on
the
car.
Figure
7
shows
how
the
running
fuz
zy-
logi
c
T
h
e
d
y
na
m
i
c
s
e
g
me
n
t
i
s
d
ou
b
l
e
d
,
w
i
t
h
o
n
l
y
o
n
e
o
f
t
h
e
se
g
m
e
n
t
s
a
cti
v
e
at
the
sa
m
e
tim
e.
In
thi
s
sit
ua
tio
n,
th
e
pa
rs
er,
lin
ke
d
to
the
de
v
e
l
o
p
m
en
t
P
C
v
i
a
a
c
o
m
m
u
n
i
c
a
t
i
o
n
s
m
a
n
a
g
e
r
,
c
a
nT
r
u
n
n
i
ng
s
y
s
t
e
m
w
i
t
h
o
u
t
h
a
l
t
i
n
g
o
r
c
o
m
p
i
l
i
n
g
.
A
t
th
e
sa
me
ti
m
e,
th
e
e
nt
ire
in
fe
re
n
c
e
fl
o
w
in
si
d
e
t
h
e
f
u
z
z
y
-
lo
gi
c
c
o
nt
r
o
l
l
e
r
i
s
g
r
a
p
h
ic
a
l
l
y
v
i
s
u
a
l
i
z
e
d
o
n
t
h
e
P
C
,
s
i
n
c
e
th
e
c
om
-
m
u
n
ic
at
i
on
s
m
a
n
a
g
e
r
al
s
o
tr
a
n
sf
e
rs
al
l
r
e
al
-
ti
m
e
d
at
a.
Th
e
ASS
exa
mple
demonstr
ates
the
appli
cabil
ity of
fuzz
y-
logictech
nolo
gies
for a
com
plex
cont
rol
problem
foun
d
in the
auto
moti
ve
indu
stry.
The
syste
m
was a
strai
ghtfo
rwar
d
desig
n
based
on
exp
eri
me
ntal
exp
erience
wit
hou
t a
mat
he
mat
ical
model
of
the
pro
ces
s.
D
uri
ngopti
miz
atio
n,
the
con
trol
stra
teg
y
was
easy
to
opt
imi
ze
due
to
thelin
guist
ic
repr
esen
tatio
n
inherent
in
the
fuzz
y-
logic
syste
m.
Tests
and
verif
icati
on
were
expe
dited
due
to
the
contr
oller
s
trans
pare
ncy.
And,
the
poor
com
putat
ional
perf
orm
ance
of
early
fuzz
7/27/2019 fuzzy logic in automobiles
23/28
y-
logic
softw
are
soluti
ons
wasoverc
ome
via a
new
gener
ation
of
soft
ware-
impl
eme
ntat
ion
tool
s [2,
13].
Inthe
rem
ain
der
of
this
arti
cle,
Ipro
vide
an
over
view
of
other
auto
mo-tive
appli
catio
ns
wher
e
fuzzy
logic
hasbeenusedsuccessf
ully.
Photo 3
Heres thesecond version
of the fuzzy-
logic controller.
The controller
uses advanced
fuzzy-logic
design
technologies
and contains a
total of 600rules.
HVACINCARS
F
uzz
y-
logi
c
desi
gn
tech
nol
ogie
s
are
well
-
esta
blis
hed
in
heat
ing
and
aircon
ditioni
ng of
reside
nces
and
offices
.Hence
, its no
surpris
e that
many
car
manuf
acture
rs alsouse
fuzzy
logic in
th
ei
r
H
V
A
C-
s
y
st
e
m
d
e
sig
n
s.
7/27/2019 fuzzy logic in automobiles
24/28
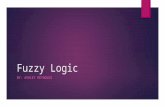
Photo 4This graph depicts the control surface of the air conditioners
blower-speed control. Blower speed is determined by temperature error
and engine-coolant temperature.
with automatic gearbox and
ABS as testvehicle. The
fuzzy-logic controllerruns on
an 8-bit microcontroller.
The car uses a speed sensor
and a single-beam telemeter
for the distance to the next
car. The actuators com- mand
brake pressure and
accelerator. Tests show the
fuzzy-logic controllercan
handle the cruise underall
the tested conditions.
Future regulations in the
European Community (EC)
require a speed con- trol forlimiting truck speeds on roads
in Europe. Todays speed
limiters use adaptive PID-
type controller. However, the
resulting truck behavioris
unsatis- factory, compared to
an experienced driver.
Therefore, a numberofrecent de-Whil
e most
car
manufa
cturers
workon
these
systems
, very
few
publish
their
efforts.
The
control
approac
h in
general
and
hencethe use
of
fuzzy
logic
in the
design
differ
signifi
cantly
for
each
manuf
acture
r. In
this
sectio
n, I
use an
exam
ple
thatFord
Motor
Compa
ny
develo
ped in
the U.S.
[14].
The
fundam
ental
goal of
HVAC
in cars
is to
make
vehicle
occupa
nts
comfort
able.Human
7/27/2019 fuzzy logic in automobiles
25/28
comfort, however,
is a complex
reaction,
involving physi-
cal,biological, and
psychological re-
sponses to thegiven conditions.
Theperformance
criterioncomfort
is not some
well-defined
mathematical for-
mulabut a
sometimes
inconsistentand empirically
determined goal.
Typical HVAC-
system sensors
measure cabin
temperature,
ambient
temperature, sun
heating load,
humid- ity, and
other factors.
Typical actuators
are variable speed
blowers, means
forvarying air
temperature,
ducting, and doors
to control the
direction ofair-
flow, and the ratio
of fresh to recircu-
lated air. This
multiple-input,
multiple-output
control problem
doesnt fall into
any convenient
cat- egory oftraditional
control theory.
Photo 4 shows
the control
surface of a part
of a HVAC
systemthe
blower-speed
control. Blowerspeed depends on
two input
variablesthe
temperature
error (i.e., the in-
car tem-
perature minus
the set-point
tempera- ture)and the engine-
coolant
temperature.
Photo 5 shows
the rule base. Ifthe
temperature error is
zero, lowblower
speed is desired. If its
too hot inside (i.e.,
positive
temperature error),
high blowerspeed isneeded to cool the
cabin.
If the error is
negative,
indicating that its
too cold inside, and
the engine is cold,
little blowerspeed
is neededfordefrost. If the
error is negative
but the engine is
warm, high blower
speed is needed to
heat up the cabin.
OTHERAPPLICATIONS
This sectionbriefly introduces
someother
examples offuzzy-
logic control in
automotive
engineering. For
details, refer to the
papers cited.
Peugeot CitronofFrance devel-
oped a fuzzy-logic
system for an intel-
ligent cruise
control [15]. The
system combines
multiple functions
forau- tonomous
intelligent cruisecontrol (i.e.,
following another
vehicle,
stop and
go
procedu
res, and
emerge
ncystop).
The
system
uses
three
fuzzy-
logic
blocks
withfour
inputs,
one
output,
and 30
rules
each.
Optim
ization
and
verificati
on ofthe
rule base
used a
Citron
XM
sedan
P
ho
t
o
5
T
h
e
r
u
l
e
b
a
s
e
f
o
r
b
l
o
w
e
r-
s
p
e
e
d
c
o
n
t
r
o
l
s
h
o
w
s
h
o
w
t
h
e
t
wo
v
a
r
i
a
b
l
es
o
f
e
n
g
i
ne
t
e
m
p
e
r
a
t
u
r
e
a
n
d
t
e
mp
e
7/27/2019 fuzzy logic in automobiles
26/28
ra-
ture
error
affec
t
blow
er
speed.
signs use fuzzy-
logic control to
achieve robust
performance,
even under the
strong load
changes ofcommercial
trucks [16, 17].
A paper from
Ford Electronics
de- scribes the
design of a
traction-control
system for a
radio-controlledmodel car[18].
The fact that Ford
publishes model-
carapplications is
symptomatic of
the fear ofmany
automotive
manufactur- ers
to admit thatthey use fuzzy
logic
as a design
technique forreal cars.
THE FUTURE ISFUZZY
Over the past
five years, fuzzy
logic has
significantly
influenced the
design of
automotive
control systems.Since using fuzzy
logic involves a
paradigm shift in
the design of a
control system,
five years is a short
period. The move
from analog to
digital solutionshas taken a much
longertime.
The key reason
for fuzzy logics
suc- cess in
automotive
engineering lies in
the implications
of itsparadigm
shift. Previously,
engineers spent
much time
creating
mathematical
models ofme-
chanical systems.
More time went
to
7/27/2019 fuzzy logic in automobiles
27/28
real-world road tests that
tuned the fudge factors of the
control algorithms.
Ifthey succeeded, they
ended up with a control
algorithm ofmathemati- cal
formulas involving many
experi- mental parameters.
Modifying orlateroptimizing
such a solution is very diffi-
cult because of its lack of
transparency.
Fuzzy logic makes this design
process faster, easier, and
more transparent. It can
implement control strategiesusing elements ofeveryday
language. Every- one familiar
with the control problem can
read the fuzzy rules and
understand what the system
is doing and why.
It also works forcontrol
systems with many control
parameters. Design- ers canbuild innovative control sys-
tems that would have been
intractable using traditional
design techniques.
The future for fuzzy logic in
auto- motive engineering is
bright. Semicon- ductor
manufacturers are
incorporating fuzzy-logicinstruction sets in their
controllers. Motorolajust
introduced the new 68HC12
family of
16-bit micros that integrate
a com-plete instruction set
for fuzzy logic at no extra
cost.
Anothernew development
is the upcoming IEC 1131-7
fuzzy-logic stan- dard [19].
This international
standard defines
consistent fuzzy-logic
develop- ment and
documentation
procedures.
With these twodevelopments, de-
signing with fuzzy logic
becomes a much simpler
task.
Constantin von Altrock
began re- search onfuzzy
logic with Hewlett-
Packardin 1984. In 1989,hefoundedandstill
manages the Fuzzy
Technolo-giesDivision of
Inform Software
Corp., a market leaderin
fuzzy-logic development
tools and turn-key appli-
cations. You may reach
Constantin [email protected].
REFERENCES
[1] Intel, Fuzzy Anti-
Lock Braking
System,
developer.intel.com/
design/MCS96/DESIG
NEX/2351. htm, 1996.[2] Benchmark
Suites forFuzzy
Logic,
www.fuzzytech.co
m/e_dwnld.htm,
1997.
[3] N. Matsumoto et al.,
Expert antiskid system,
IEEEIECON87,
810816, 1987.
[4] C. von Altrock,FuzzyLogic
andNeuroFuzzy
Applications Ex-plained,Prentice Hall, Englewood
Cliffs,NJ, 1995.
[5] H. Kawai et al., Engine
control system,Proc. of the
Intl Conf. on FuzzyLogic and
NeuralNetworks, Iizuka,
Japan, 929937, 1990.
[6] L. Feldkamp and G.
Puskorius, Trainable fuzzyand neural-fuzzy systems for
idle-speed control,
2nd IEEE Intl. Conf. onFuzzy
Systems, 4551, 1993.
[7] H. Takahashi, K. Ikeura, and
T. Yamamori, 5-speed
automatic transmission
installed fuzzy reason- ing,
IFES91FuzzyEngineering
toward Human Friendly
Systems,
11361137, 1991.
[8] H. Ikeda et al., An
intelligent automatic
transmission control using
a one-chip fuzzy inference
engine, Proc. of the Intl.
Fuzzy Systems and
Intelligent Control Conf. in
Louisville, 4450, 1992.
[9] P. Sakaguchi et al.,
Application of fuzzy logic to
shift scheduling method for
automatic transmis- sion,
2nd IEEE Intl. Conf. on
Fuzzy Systems, 5258, 1993.
[10] C. von Altrock, B. Krause,and H.-J. Zimmermann,
mailto:[email protected]://www.fuzzytech.com/http://www.fuzzytech.com/http://www.fuzzytech.com/http://www.fuzzytech.com/mailto:[email protected]7/27/2019 fuzzy logic in automobiles
28/28
Advanced fuzzy logic
control of a model carin
extreme situations,Fuzzy
Sets and Systems, 48:1, 41
52, 1992.
[11] INFORM GmbH/Inform
Soft- ware Corp.,fuzzyTECHand
NeuroFuzzy Module 5.0
UsersManual, Chicago,
IL, 1997.
[12] H.-J. Zimmermann and U.
Thole, On the suitability of
minimum andproduct
operators for the inter-
section of fuzzy sets,FuzzySets and Systems, 2, 173
186, 1979.
[13] C. von Altrockand B.
Krause, On-Line-
Development Tools forFuzzy
Knowledge-Base Systems of
Higher Order, 2nd Intl
Conf. on FuzzyLogic and
Neural Networks
Proceedings, Iizuka, Japan,
1992.
[14] L.I. Davis et al., Fuzzy
Logic forVehicle Climate
Control, 3rdIEEE Intl.
Conf. onFuzzy Sys- tems,
530534, 1994.
[15] J.-P. Aurrand-Lions, M. des
Saint
Blancard, and P. Jarri,
Autonomous
Intelligent Cruise
Control with Fuzzy
Logic,EUFIT931st
Eur. Congress onFuzzy
andIntelligent
Technologies, Aachen,
17, 1993.
[16] V.M. Thurm, P.
Schaefer, and W.
Schielen, Fuzzy
Control ofa Speed
Limiter, ISATA Conf.,
1993.
[17]www.fuzzytech.com/e_a_
spe.htm.[18] R. Russ,
Designing a Fuzzy
Logic Traction
Control System,
Proc. of the
Embedded Systems
Conf., 2, 183196,
1994.[19]www.fuzzytech.com/e_iec.htm.
SOURCES
fuzzyTECHDevelopment System
Inform Software Corp.
2001Midwest Rd.
Oak Brook,
IL 60523
(630) 268-
7550
Fax: (630)
268-7554
www.fuzzyt
Motorola MCU Information
P.O. Box 13026
Austin, TX 78711 (512)
328-2268, x985
www.mcu.motsps.com
www.fuzzytech.com/moto
rola.htm
Circuit Cellar INK, the ComputerApplications Journal. Reprinted by
permission. For subscription
information, call (860) 875-2199 or
subscribe circellar.com
http://www.fuzzytech.com/e_a_spe.htmhttp://www.fuzzytech.com/e_a_spe.htmhttp://www.fuzzytech.com/e_iec.htmhttp://www.fuzzytech.com/e_iec.htmhttp://www.fuzzytech.com/http://www.mcu.motsps.com/http://www.fuzzytech.com/motorola.htmhttp://www.fuzzytech.com/motorola.htmhttp://www.fuzzytech.com/e_a_spe.htmhttp://www.fuzzytech.com/e_a_spe.htmhttp://www.fuzzytech.com/e_iec.htmhttp://www.fuzzytech.com/e_iec.htmhttp://www.fuzzytech.com/http://www.mcu.motsps.com/http://www.fuzzytech.com/motorola.htmhttp://www.fuzzytech.com/motorola.htm