Fundamentals of Intelligent Automobile Control
24
Fundamentals of Intelligent Automobile Control Fundamentals of Intelligent Automobile Control 22, Dec., 2004 Hiroshi TAKAHASHI Nissan Research Center Nissan Motor Co., Ltd. [email protected] 1/43 Tutorial lecture
Transcript of Fundamentals of Intelligent Automobile Control

Fundamentals of Intelligent Automobile ControlFundamentals of Intelligent Automobile Control
22, Dec., 2004
Hiroshi TAKAHASHI
Nissan Research CenterNissan Motor Co., Ltd.
1/43
Tutorial lecture
Hiroshi TAKAHASHI
This presentation were performed when Dr. Takahashi was both the senior manager in Nissan research Center , Nissan Motor Co., Ltd. and visiting professor of Tokyo Institute of Technology. Now, He is professor of Shornan Institute of technology after quitting Nissan Research Center and Tokyo Institute of Technology Copyright of This material is belonging to Nissan Motor Co., Ltd. Nobody can use these slides.

Hainan University 22. Dec., 2004Tutorial lecture
Outline
■ What will the future vehicle be ? When will it be realized ?
■ Introduction of present ITS applications
■ Case study
■ Next step

Hainan University 22. Dec., 2004Tutorial lecture
Autonomous vehicle ( collaboration with infrastructure)
車間距離センサ
磁気ネイル
漏洩同軸ケーブル(LCX)
ステアリングアクチュエータスロットルアクチュエータ
ブレーキアクチュエータ
送受信機
舵角センサ 車輪速センサ エンジン回転数センサ 等のセンサ
磁気センサ
路車間通信コントローラ
車々間通信
報知インターフェースHUD、CRT
スピー カ
CCDカメラ
アンテナ
Vehicle to vehicle communication
Magnetic nail
Magnetic sensor
Vehicle to roadcommunication
Magnetic sensor
Camera
Radar
LCX cable
Actuators
Sensors

Hainan University 22. Dec., 2004Tutorial lecture
Future vehicle
Year
Deg
ree
Of I
ntel
ligen
ce
2000 2010 2020 2030
When will we get the autonomous vehicle ?
2040
2040

Hainan University 22. Dec., 2004Tutorial lecture
■ Introduction of ITS applications
1)Lane-Keeping Support System
2)Adaptive Cruise Control, Stop&Go
3)Doze detection
4)Parking assist
4/51

Hainan University 22. Dec., 2004Tutorial lecture
Outline
■ What will the future vehicle be ? When will it be realized ?
■ Introduction of present ITS applications
■ Case study
■ Next step

Hainan University 22. Dec., 2004Tutorial lecture
SMART SENSING
Technical fields of our study
RoadEnvironment Driver Vehicle
Human CenteredAutomation System in ITS
Inference of driver’s intentionusing Camera/Radar
Hainan University 22. Dec., 2004Tutorial lecture
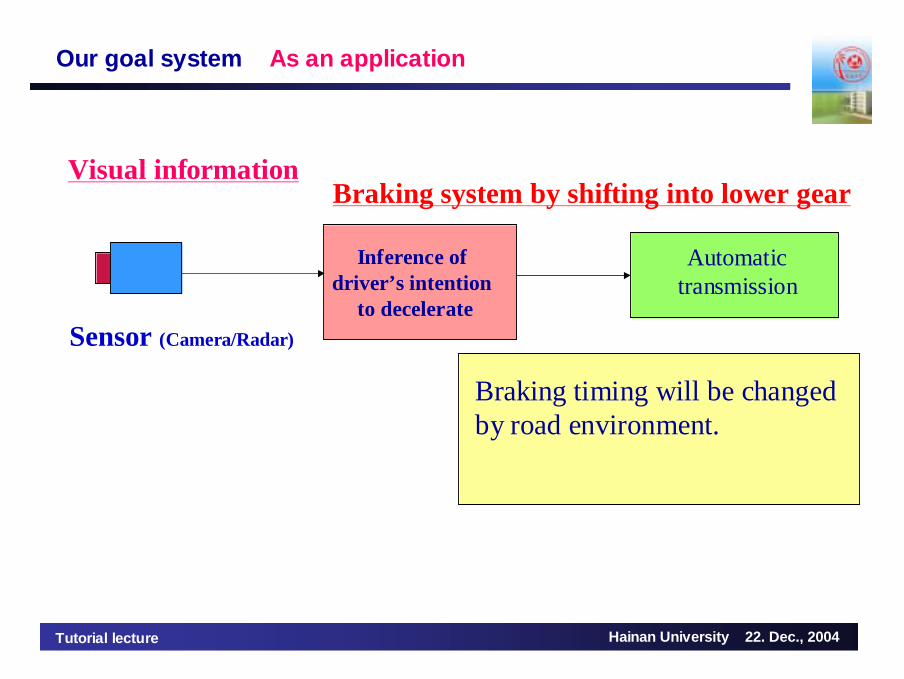
Our goal system As an application
Inference of driver’s intention
to decelerate
Automatic transmission
Braking system by shifting into lower gear
Sensor (Camera/Radar)
Visual information
Braking timing will be changedby road environment.

Hainan University 22. Dec., 2004Tutorial lecture
Vehicle behavior
At the steep down hill
The vehicle is automatically shifting into lower gearto decelerate when the driver wants

Hainan University 22. Dec., 2004Tutorial lecture
Approach
How to infer driver’s intention to decelerate
Hierarchical Fuzzy Integral as a Smart sensor fusion(HFI)
28/43

Hainan University 22. Dec., 2004Tutorial lecture
Hierarchical Fuzzy Integral
Multi purpose decision method
Function aboutdriver’s intention
Decision A or B
Evaluation functions
Weights are changed by question
Weights are changedby camera , radar’ data
Shift or not
Analogies

Hainan University 22. Dec., 2004Tutorial lecture
Smart sensor fusion
30/43
Hainan University 22. Dec., 2004Tutorial lecture
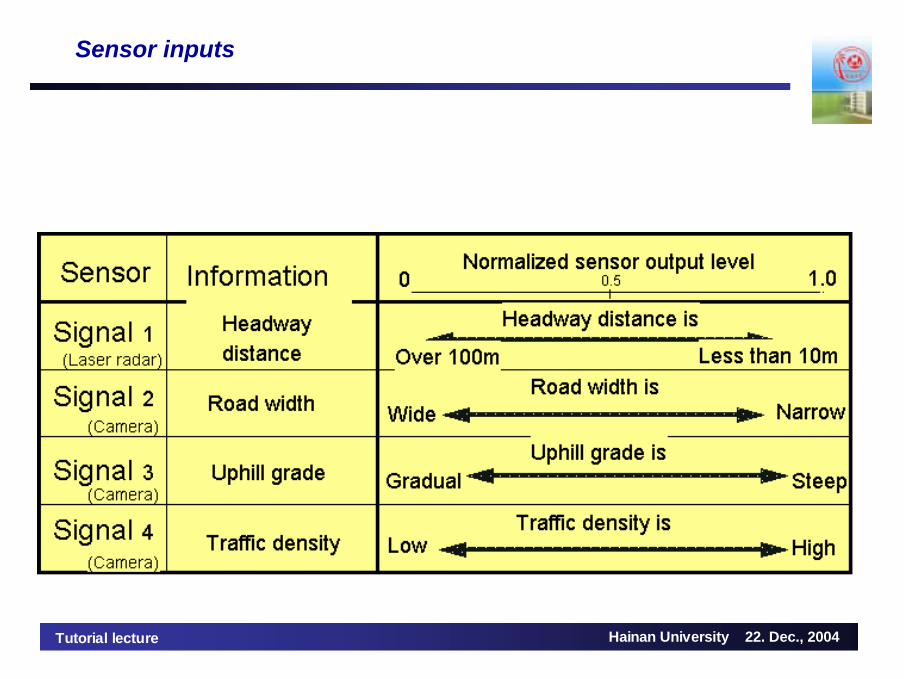
Sensor inputs

Hainan University 22. Dec., 2004Tutorial lecture
Technical aspects
Inference ModelCamera
Laser radar
Sensor fusion
Shift signal to get deceleration
If Standard Deviations of accel. Pedal is BIG,then driver tends to be cautious to road environment
>> easy to change lower gear(quick response)
If Standard Deviations of accel. Pedal is Small, then driver tends to be not so cautious to road environment
>> not so easy to change lower gear (smooth drive)

Hainan University 22. Dec., 2004Tutorial lecture
Hierarchical fuzzy integral Smart sensing engine

Hainan University 22. Dec., 2004Tutorial lecture
Experimental system

ExperimentsExperiments
35/43

Hainan University 22. Dec., 2004Tutorial lecture
Scenes for experiments

Hainan University 22. Dec., 2004Tutorial lecture
Experimental results 1
Scene 1
10 20 30 40 50 Time(sec)0.0
0.5
1.0
10 20 30 40 50 Time(sec)0.0
0.5
1.0
Plausibility measure
Belief measure
10 20 30 40 50 Time(sec)0.0
0.5
1.0
Norm
aliz
ed s
enso
r si
gnal
sG
rade
of in
tention
Width
Gradient
Density
Headway
Gra
de
of in
tention
DE
DE
Gear is changed to deceleratein cautious judgement
Gear is not changedin normal judgement

Hainan University 22. Dec., 2004Tutorial lecture
Scene 2
10 20 30 40 50 Time(sec)0.0
0.5
1.0
10 20 30 40 50 Time(sec)0.0
0.5
1.0
DE
10 20 30 40 50 Time(sec)0.0
0.5
1.0
Plausibility measure
Belief measure
Norm
aliz
ed s
enso
r si
gnal
s
Gradient
Headway
Width
Density
Gra
de
of in
tention
Gra
de
of in
tention
DE
Gear is changed to deceleratein cautious judgement
(Earlier than scene 1’s )
Gear is changedin normal judgement
Experimental results 2
Hainan University 22. Dec., 2004Tutorial lecture
Conclusions for this case study
• Intelligent Sensor fusion method for human centered control is proposed
•Inference model of driver’s intention is proposed and validated
39/43

Hainan University 22. Dec., 2004Tutorial lecture
Outline
■ What will the future vehicle be ? When will it be realized ?
■ Introduction of present ITS applications
■ Case study
■ Next step

Hainan University 22. Dec., 2004Tutorial lecture
Driver behavior model
Improvement of the gap between driver’s intentionAnd Intelligent vehicle’s intention
Adaptation to each drive’s characteristics
Computational IntelligenceComputational Intelligence
Indispensable technologies
Conclusion for plenary talk
Required functions for future vehicles
42/43

Hainan University 22. Dec., 2004Tutorial lecture
Thank you for your attention




![Autonomous intelligent cruise control - Vehicular ......based on the so-called Autonomous Intelligent Cruise Control (AICC) or adaptive cruise control system [8] that several automobile](https://static.fdocuments.us/doc/165x107/5f3c32085a1a594d7919f518/autonomous-intelligent-cruise-control-vehicular-based-on-the-so-called.jpg)