Fully Torqued Adapted Ring Toss - WordPress.com · Final Design and Use In the final design, energy...
36
Fully Torqued Adapted Ring Toss Brady Hiob Derek Morgan Chris Rini ME 329 May 7, 2015 Dr. Schuster
Transcript of Fully Torqued Adapted Ring Toss - WordPress.com · Final Design and Use In the final design, energy...

Fully Torqued
Adapted Ring Toss
Brady Hiob
Derek Morgan
Chris Rini
ME 329
May 7, 2015
Dr. Schuster

Introduction
Physical activity is an essential ingredient in everyone’s life. It is the medium through which we
interact with our physical world, and as such physical activity helps us to define ourselves and
our place in this world. This interaction is something that is extraordinarily difficult for someone
who has disabilities, but letting this difficulty prevent a person from physical activity is extremely
detrimental. Participating in physical recreation helps those who have disabilities to combat the
social isolation so many experience. The goal of this device is to allow people with disabilities to
be competitive in a game of ring toss without feeling ostracized due to using a device to assist,
to give just enough aid to allow and encourage physical activity.
Problem Statement: “Produce a prototype of a “Ring Toss” shooting machine to be used by a
person with very limited physical ability.”
Table 1. User and Engineering Requirements of a Ring Toss Device for People with Disabilities
Customer Requirements Engineering Design Requirements
usable with very limited physical ability
able to be activated by one or two switches and move a single hand with a range equal to a 6 inch sphere.
offers competitiveness with able-bodied ring-toss competitors
able to accurately and consistently throw the ring a distance of 6 feet
mobile/portable small and light enough to be carried around a fair or carnival on a motorized wheelchair
safe if the machine fails, it should fail in such a way that it will not harm the user of anyone else; have under-designed components designed to break before such catastrophic failure
cost effective prototype must cost less than $50
ease of assembly try to design it fully constructed so that this will not be a factor
ease of use must not require sudden or strenuous movements on the part of the operator, even if they are within a 6 inch radius; operator should be able to have at least a 5 second delay between tasks; there should be no awkward positions required for operation
durable/portable able to be dropped from two feet in the air
ease of maintenance should at least be able to run through a day at the fair or approximately 50 throws (10 rounds of 5 throws) without having to be serviced
recyclable (lifecycle consideration) At least part of the bed must be recyclable or able to be repurposed on a mass and repeatable scale.

Conceptualization and Modeling
We started off this phase of the process with a brainstorming and “brainwriting” session, being
careful to defer judgment and build off of each other’s ideas. Once we have generated a large
variety of ideas we began to build rough models of them out of foam board and household items
so that we could physically manipulate them and get a better idea of how they would work
spatially. Initial designs included some of the following:
Sliding rail gun design: This design was all contained in a hand-held device. It had a cocking
mechanism that pulled a tray back along a rail system. A rubber band attached the tray and the
front of the rail system acted as the spring force. When the trigger was released the tray was
launched forward until it hit a stopper at the front of the rail system. This design failed due to
excessive friction forces between the tray and the rail system and inability to align the device
properly for ejection.
Swinging arm with stopper: This design implemented another runway with an arm at the back
that would be pulled backwards away from the ring and stretch a rubber band. When the arm
was released, the force of the rubber band would spring the arm forward again to make an
impulse contact with the ring. This design failed because of the lack of usability and simplicity.
This design was difficult to aim and to achieve similar tension levels, which led to inconsistency
in trial results.
Side-arm ring slinging device: This used a ratcheting mechanism to pull back a spring-loaded
throwing arm to be released in the horizontal plane, which would hit a stopper, and the abrupt
stop would cause the ring to be released. The action would be akin to a clay pigeon launcher
for skeet shooting. Because of friction with the ring holder on the throwing arm, the ring would
be given a spinning action similar to that of a Frisbee. This design was abandoned because of
the difficulty involved in accounting for friction and designing an arm that could repeatedly
release the ring the same way every time.
Roller ramp: This design was loosely based around the idea of a launch ramp in which the ring
was lifted a certain distance to increase the ring’s potential energy due to gravity. The ring
would then be released and rolled or slid down a ramp that would launch it towards the target.
The height that the ring was lifted, as well as the launch angle of the ramp would be user
selected inputs. The idea seemed viable on paper, but was ultimately rejected due to friction
losses.
Design Considerations: Choosing a Motor and Transmission
Once we had the basic principles of our design set out, our next step was to design the specifics
of the inner workings. We did the projectile motion physics calculations to figure out the force we
would need in order to stretch the spring to achieve the necessary trajectory (6 feet while
airborne from the table top). With this force, and the diameter of the spool that would be winding

the spring, we then calculated the torque that corresponded to the necessary force. With the
results from the projectile motion calculations, we found that we would need 250 N-mm of
torque to operate the machine.
We then went through the motors and found one that would have the highest torque when it was
running at max efficiency. This turned out to be the Sanko motor. Although the max-efficiency
torque on this motor was relatively high, its speed was much lower than the one with the next
lowest torque at max-efficiency, the Johnson 220. Because we wanted our device to be able to
reset more quickly, and because we had already planned to design a gear train that ramped up
the torque, we decided to go with this faster motor, despite its lower torque. This smaller motor
had a max-efficiency torque of about 4.5 N-mm.
Our initial assumption was that the spur and bevel gears would have an efficiency of 60% and a
wormset would have an efficiency of 30%. We played around with different gear trains to find
one that would increase torque from 4.5 N-mm up to 250 N-mm. We found one and started to
build it. While we were doing this, we realized that once the motor was turned off, there would
be nothing keeping the spur gears from back-driving, so to solve this problem a spur gear was
implemented, despite the power loss to efficiency of the wormset. We played around with gear
ratios again until we found one using a wormset that met our aforementioned needs. We built
the machine using this gear train. Once the machine was built, we realized that although the
wormset kept the gear train from back-driving once the motor was switched off, it also kept it
from back-driving when we needed to reset it. To solve this problem, a simple clutch was
installed, using a rubber band to keep the gear of the wormset engaged during operation, but
could be disengaged during the reset stage.
Figure 2. Transmission Schematic

Figure 3. Transmission Connection to Rubber Band (Part B)
Transmission Specifications
The transmission design is set for a huge reduction in speed and a very large increase in
torque. We shall first talk about it ignoring losses due to inefficiencies. The first mesh of spur
gears has a gear ratio of 3.33:1. The second mesh has a gear ratio of 5. The worm gear has a
gear ratio of 36:1. It was chosen for two different reasons: to provide a locking mechanism to
prevent the rubber band from backdriving the system, and for the huge gear ratio that worm sets
have. With the worm set and the spur gear ratios combined, the overall gear ratio of this
transmission system is over 600:1. In application we see a much smaller effective torque
increase due to inefficiencies in the system. Worm gears in particular are incredibly inefficient
(~30-40% efficient) due to sliding friction. The efficiency of each of the spur gears is also very
bad (only around 60% efficient) due to the low quality meshes. These inefficiencies actually turn
out to be even less, as discussed in the next section.
Performance and Power Requirements
When we first tested this design, we found that we had neglected something somewhere in our
calculations, as our machine could only throw the ring about 5 feet, which meant we were not
getting all the power that we thought we should be. Looking back through the assumptions we
had made along the way, both the ones we had written and unconscious ones, we discovered a
few that were no longer feasible.
There are many parts to the system that can contribute to power loss in the system. One of the
main contributors to power loss is the inexpensive gear system. This gear system has
inconsistent tooth sizing and no lubrication. All of these inefficiencies (explained above) add up
to a huge power loss.
We originally assumed the length of the throwing arm to be 8 inches. This was changed during
the build process. We did not account for the non-linearization of the spring factor, i.e. the
rubber band gave more resistance the more it was pulled. To increase force with springs it is
preferential to increase displacement over spring constant to increase force, thus we were
underestimating the power we were generating. We originally neglected losses due to bearings.
1T
40T
Input from shaft to worm
Rubber band

This was an oversimplification, because all of our bearings are bushings, which are not very
efficient, and we have 6 of them. In summary, energy is not perfectly converted from potential
to kinetic energy because friction, inelastic motion, and other non-conservative forces. We
underestimated these losses in our original motor selection process, which resulted an
overestimation of output power.
Given all of these losses, we actually needed more torque than we had anticipated. The simple
solution to this was to implement the more powerful motor, the Sanko, which we had initially
neglected in favor of the faster revolution speed of the Johnson 220. The Sanko motor was able
to overcome our improper assumption, and the loss in speed was insignificant, and actually
made it easier to monitor and judge the distance that the device throws the ring. The torque
requirement calculations are attached in Appendix B: calculation 2.
Final Design and Use
In the final design, energy is stored in a rubber band under a large amount of deformation, and
thus a lot of tension. The lever arm is locked in place with the trigger mechanism and a ring is
set on a hook at the end of it. One end of the rubber band is attached to the opposite end of the
lever arm (the end not holding the ring), and the other end is attached to spool powered by the
gear train. When the motor is turned on the spool rotates and the rubber band begins to wind
up, thus creating tension needed in order to launch the ring. By releasing the locked trigger
mechanism, the lever arm is allowed to spring forward and to launch the ring in a catapult
fashion. To reset the machine for the next throw, the spring-loaded shaft of the spool is pressed,
which disengages the worm gear from the worm. This releases all the tension in the rubber
band and allows the lever arm to fall back into the trigger mechanism, which the user then locks
closed so the process can be repeated.
It operates on 2.74 Watts of power and takes an average of 29 seconds to fully wind, for a total
of 79.5 Joules of electrical power per ring toss.
The maximum operating efficiency of our Sanko motor is 63% which occurs at about 3 N-mm of
torque. Our machine operates with the motor at about 3.82 N-mm of torque, which is
exceptionally close given the iterations that this design system required. (The motor efficiency
curves can be seen in Appendix C).

Materials, Weight, and Cost
The materials and their corresponding weights and cost are listed below.
Table 2. Materials, Weight, and Cost
Material Quantity Weight (lbf) Unit Cost ($) Total Cost ($)
Foam Core 1 0.70 2.00 2.00
Lego Parts 141 ~1.00 0.10 14.10
Electric Motor 1 ~0.50 1.00 1.00
Gears 6 ~0.125 0.50 3.00
Battery 1 ~0.25 1.50 1.50
Switch 1 ~0.10 0.50 0.50
Wire 2 ~0.00 0.25 0.50
Total = 2.675 Total = 22.60
Some of the materials that we used in this design were actually found laying around which
helped to significantly reduce the overall cost of this design. The other largest increase seen in
this design was the addition of large gears.
Other Factors: Attractiveness and Future Adaptability
This design is very visually stimulating yet simple. Its operation is exceptionally intuitive which
makes it very easy to use. Fully Torqued also leaves room for user adjustability and creativity.
For instance, if the user decides that they would like to increase or decrease the gear ratio, they
simply can just add on or take off gears as they please because the spur gears are designed to
be very accessible and thus open to tinkering.
Fully Torqued also offers an elegant and easy to use solution for aiming. The user simply twists
the end gear at the right of the switch to rotate the machine on its calibration pedestal. In order
to adjust height and distance, the user simply increases or decreases the tension in the rubber
band. This is done by varying the time the motor is allowed to wind the rubber band. The rubber
band has a marking flag attached to it to help inform the user where the approximate desired
range is.
With simple improvements to this device, its range could be drastically increased relatively
easily. Reducing friction would be the biggest change made to this device to achieve this mark
of 15 ft. Replacing the spur gears with lightweight aluminum gears that have higher precision
and lubrication would drastically increase the efficiency of the device. Adding lubrication to the
worm set will likewise reduce the friction in the device and increase the torque ratio. A better

motor with a faster speed could be implemented to decrease reset time, as long as it had at
least as much torque as the current motor. These benefits though, would need to be weighed
against increased costs.
Though we feel that the design is reliable and effective, there are a few aspects which can be
improved upon. First would be to improve the clutch system which is a simple, but effective
rubber band. The incorporation of a spring or something of that nature would definitely add to
the reliability of the design, and in mass production should not significantly increase cost. It may
actually decrease cost because it would be easier to assemble. While we realize that the gears
are overhung, or cantilevered, this was done intentionally. It makes the assembly much easier,
especially for mass-production, which will decrease production costs. Also, because the loads
on these gears are relatively small compared to the strength of the materials, the wear on the
supporting bearings will not be limiting to machine life. The spring and batteries will limit
machine life, which is also intentional as these are the easiest parts to replace.
Our coolest factor is our side-to-side aiming mechanism, which involved planetary gears
beneath the main body of the device, with a train of spur gears leading out from underneath it so
as to make it accessible to the user within their realm of mobility. As far as we know we are the
only design team that had an integrated system for lateral adjustment, and we are quite proud of
our innovative solution to this problem.
In addition to being low cost and highly effective, this machine is also very lightweight and
reasonably compact. It is easily able to be stowed on a wheelchair as you wander around the
fair or carnival. Due to its simplicity, this device is also very reliable, with the potential to
consistently win you the biggest prizes at the gaming booth.

Appendix A: Drawings and Photos
Initial concept drawing of transmission

Side view: throwing arm resetting, trigger mechanism still open.

Aiming Markings
Top view: motor and transmission

Rear view: Switch, trigger mechanism, lateral aiming gears, lateral aiming pointer and markings.

Other side view: transmission mechanism, lateral aiming gears

Appendix B: Calculations












Appendix C: Motor Data
Figure 4. Torque vs. Current vs. Speed
Figure 4 shows that the optimal place to operate this motor at is a torque of about 8 N-mm and
0.7 Amps. The motor is our design ran at a torque throughout the whole range shown above.
Figure 5. Torque vs. Output Power vs. Efficiency

Figure 5 shows that the most efficient torque to run the motor at is near 3 N-mm which provides
an efficiency of about 65%. The place where this plots cross is a good combination in order to
have high efficiency while getting sufficient power. This occurs at nearly 6 N-mm.
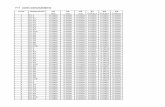
Table 3. Various Motor Properties
Torque
(N-mm)
Speed
(RPM)
Current
(Amps)
H (Watts) Efficiency
0 6840 0.06 0 0
1.59224 6156 0.192 1.026 0.593
3.18448 5472 0.325 1.825 0.624
4.77672 4788 0.457 2.395 0.582
6.36896 4104 0.590 2.737 0.516
7.96119 3420 0.722 2.851 0.439
9.55343 2736 0.855 2.737 0.356
11.14567 2052 0.987 2.395 0.270
12.73791 1368 1.120 1.825 0.181
14.33015 684 1.252 1.026 0.091
15.92239 0 1.38 0 0
Table 3 is showing motor properties through a range of torque, speed, current, power, and
efficiency. Note that the highest efficiency is near 3 N-mm at 6000 RPM.

Appendix D: Initial Planning
List of Major Components
1. Base
a. Heavy and sturdy enough so that when the throwing arm throws, the base will
stay to stationary
2. Throwing arm
3. Fulcrum
4. Pulley
a. To change direction of rubber band and allow us to put the gear train behind the
fulcrum
5. Motor
a. In order to determine which motor
i. Assume a distance to throw
ii. Use physics/dynamics to find force needed to get it that far
iii. Use physics to find spring displacement necessary to achieve that force
iv. Convert that displacement to number of turns on the spool to know how
many winds/how far we have to wind the rubber band up
v. Find the torque necessary to achieve the necessary spring force
vi. Go backward through assumed gear ratio to find the motor necessary
vii. If no motor works, find best fit and change gear ratio to make it acceptable
viii. Iterate
6. Winder?
a. To pull arm back down in case it is deemed that the armature must be lowered
more than three inches to be reset
Description of Gear Train
1. Worm gear
a. On the shaft driven directly by motor
b. Will keep the gear train from running backwards should the rubber band force
become more powerful than that exerted by the motor
c. Also, its large gear ratio helps us turn the speed from the motor into the torque we
need to do the spring
d. The loss in power due to the friction from slipping should be outweighed by the
increase in torque.
2. Two spur gear torque step-up meshes
a. These also work to turn speed from the motor into torque
b. We are anticipating needing a lot of torque
c. In these, a small pinion meshes with a large gear. This large gear ratio reduces
speed and increases torque. The large gear is affixed to the same shaft as another

small pinion, thus they have the same angular velocity, thus the increase in torque
is maintained. This is repeated one more time.
d. To the final gear shaft of these torque step-ups, we affix the spool that will wind
the rubber band
3. Clutch?
a. Because the worm gear will disallow the gear train from
b.
4. Differential?
a. We are still considering whether or not we would like to add a differential
b. The purpose of this would be to transfer all the motor power to a dummy gear at a
pre-specified point so that the motor would never get to a point where it was
overworked and would potentially burn out
Production Schedule
1. Customer requirements and specification
a. The first step in our process is to define exactly what the problem is. We will need
to develop a detailed problem statement and outline specific design requirements,
including desired features that we would aim to include.
2. Research and conceptualization
a. In order to better understand the motivations of our targeted demographic, each
member of the group attempted to toss the ring onto the bottles under the given
constraints of one handed motion relegated to within a 6 inch radius. After
attempting this and realizing first-hand just how difficult of a task it proved to be,
we gained new appreciation for the relevance of the system we are attempting to
create. In addition, these first-hand trials gave us insight as to specific aspects that
would need to be addressed.
3. Conceptual model building
a. We will need to start off this phase of the process with a brainstorming session,
being careful to defer judgement and build off of each other’s ideas. Once we
have generated a large variety of ideas we can begin to build rough models of
them out of foam board and household items so that we can physically manipulate
them and get a better idea of how they work spatially
4. Preliminary analysis and layout
a. From the models we will be able to better understand which types of ideas work
the best and begin to formulate the basics of the primary design of the system.
5. Prototyping
a. During this stage, we will build a physical model off of the sketched layout from
our preliminary analysis using Lego Technic pieces. Through trying different gear
train layouts and iterating them, we will flesh out the actual design of the system.
6. Design refinement and Final Assembly

a. With the system design now established, we will be able to analyze its
components in order to optimize efficiency and ease-of-use, and ensure that it has
the desired robustness. Minor tweaks and additional features will likely be added
with further testing as we explore ways to make the system more convenient and
competitive for the user.
i. Annotated Sketch and Approach
1. Design drawings will be instrumental in communicating our design
to our fellow team members as well as in detailed analysis of the
system components
ii. List of major components
1. A list of components and bill of materials is an essential part of the
manufacturing process.
iii. Description of transmission
1. Developing a clear and easy to follow description of the
transmission at this stage will aid in developing the presentation of
the system and will also be useful in communicating with
manufactures about the best methods to produce the product.
7. Develop presentation
a. With the design of the system completed, it will now be time to present it to the
client. It is vital to explain the use of the system in clear language using visuals. A
guided demonstration of the product may also be a good idea in order to get the
client personally invested in the system and versed in its operation.

MEMORANDUM
To: Peter Schuster, Professor, Department of Mechanical Engineering, Cal Poly SLO
From: Brady Hiob Chris Rini
[email protected] [email protected]
Derek Morgan
Date: 4/23/2015
RE: Assisted Ring Toss Design Project
Our project development is done in outline form for organization and ease of reference.
Production Schedule
8. Customer requirements and specification
a. The first step in our process is to define exactly what the problem is. We will need
to develop a detailed problem statement and outline specific design requirements,
including desired features that we would aim to include.
9. Research and conceptualization
a. In order to better understand the motivations of our targeted demographic, each
member of the group attempted to toss the ring onto the bottles under the given
constraints of one handed motion relegated to within a 6 inch radius. After
attempting this and realizing first-hand just how difficult of a task it proved to be,
we gained new appreciation for the relevance of the system we are attempting to
create. In addition, these first-hand trials gave us insight as to specific aspects that
would need to be addressed.
10. Conceptual model building
a. We will need to start off this phase of the process with a brainstorming session,
being careful to defer judgment and build off of each other’s ideas. Once we have
generated a large variety of ideas we can begin to build rough models of them out
of foam board and household items so that we can physically manipulate them
and get a better idea of how they work spatially
11. Preliminary analysis and layout

a. From the models we will be able to better understand which types of ideas work
the best and begin to formulate the basics of the primary design of the system.
12. Prototyping
a. During this stage, we will build a physical model off of the sketched layout from
our preliminary analysis using Lego Technic pieces. Through trying different gear
train layouts and iterating them, we will flesh out the actual design of the system.
13. Design refinement and Final Assembly
a. With the system design now established, we will be able to analyze its
components in order to optimize efficiency and ease-of-use, and ensure that it has
the desired robustness. Minor tweaks and additional features will likely be added
with further testing as we explore ways to make the system more convenient and
competitive for the user.
i. Annotated Sketch and Approach
1. Design drawings will be instrumental in communicating our design
to our fellow team members as well as in detailed analysis of the
system components
ii. List of major components
1. A list of components and bill of materials is an essential part of the
manufacturing process.
iii. Description of transmission
1. Developing a clear and easy to follow description of the
transmission at this stage will aid in developing the presentation of
the system and will also be useful in communicating with
manufactures about the best methods to produce the product.
14. Develop presentation
a. With the design of the system completed, it will now be time to present it to the
client. It is vital to explain the use of the system in clear language using visuals. A
guided demonstration of the product may also be a good idea in order to get the
client personally invested in the system and versed in its operation.

List of Major Components
7. Base
a. Heavy and sturdy enough so that when the throwing arm throws, the base will
stay to stationary
8. Throwing arm
9. Fulcrum
10. Pulley
a. To change direction of rubber band and allow us to put the gear train behind the
fulcrum
11. Motor
a. In order to determine which motor
i. Assume a distance to throw
ii. Use physics/dynamics to find force needed to get it that far
iii. Use physics to find spring displacement necessary to achieve that force
iv. Convert that displacement to number of turns on the spool to know how
many winds/how far we have to wind the rubber band up
v. Find the torque necessary to achieve the necessary spring force
vi. Go backward through assumed gear ratio to find the motor necessary
vii. If no motor works, find best fit and change gear ratio to make it acceptable
viii. Iterate
12. Winder?
a. To pull arm back down in case it is deemed that the armature must be lowered
more than three inches to be reset

Description of Gear Train
5. Worm gear
a. On the shaft driven directly by motor
b. Will keep the gear train from running backwards should the rubber band force
become more powerful than that exerted by the motor
c. Also, its large gear ratio helps us turn the speed from the motor into the torque we
need to do the spring
d. The loss in power due to the friction from slipping should be outweighed by the
increase in torque.
6. Two spur gear torque step-up meshes
a. These also work to turn speed from the motor into torque
b. We are anticipating needing a lot of torque
c. In these, a small pinion meshes with a large gear. This large gear ratio reduces
speed and increases torque. The large gear is affixed to the same shaft as another
small pinion, thus they have the same angular velocity, and thus the increase in
torque is maintained. This is repeated one more time.
d. To the final gear shaft of these torque step-ups, we affix the spool that will wind
the rubber band
7. Clutch?
a. Because the worm gear will disallow the gear train from running backwards, we
anticipate needing a clutch of some sort so that we will be able to unwind the
rubber band from the spool so that the device can be reset for successive throwing
attempts
b. We are still looking for a way to bypass this though as it will likely add extra
components that will deduct from out budget
8. Differential?
a. We are still considering whether or not we would like to add a differential
b. The purpose of this would be to transfer all the motor power to a dummy gear at a
pre-specified point so that the motor would never get to a point where it was
overworked and would potentially burn out
Attachments (1)


Appendix E: Final Test Results