Full-Line Catalog - Shinano ABV Technologies Pvt. Ltd. · Custom Assemblies DC Brushless Motors DC...
40
Custom Assemblies DC Brushless Motors DC Servo Motors Stepping Motors The Difference Is Moving. Full-Line Catalog
Transcript of Full-Line Catalog - Shinano ABV Technologies Pvt. Ltd. · Custom Assemblies DC Brushless Motors DC...

Custom Assemblies
DC Brushless Motors
DC Servo Motors
Stepping Motors
The Difference Is Moving.
Full-Line Catalog

Shinano Kensi Corporation is one of the world’s leading
OEM motor manufacturers. With state-of-the-art production
facilities in Asia and around the world, we compete on a
global basis. We have developed a reputation as an
aggressive, dynamic, hard working company dedicated to
customer service and delivering on our promises over and
over again.
Innovation and service have moved this company forward
for 85 years. Our ability to offer customized engineering
and production even under the most difficult challenges has
earned us the reputation as a true innovator in the motion
control field.
Our ability to consistently do more than the expected—
to provide better solutions, more value, and work harder
for our customers is what distinguishes this company.
This catalog represents the depth and scope of Shinano
Kenshi Corporation. From the highest levels of custom
assembly to the wide range of available motors, SKC is
poised to serve your needs through a high dynamic of service.
A company of distinction.

3
Table of Contents.
SYSTEM SOLUTIONS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4
DC BRUSHLESS MOTORS
Model DR-38312 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6
Model DR-5238-007 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7
Model DR-6236-152 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8
Model DR-8738-252 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .9
Model DR-6634-514 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .10
Model DR-8538-555/ 888 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .11
Models DR-14312/DR-20312/DR-24312 . . . . . . . . . . . . . . . .12
Models DR-29312/DR-4734/DR-7638 . . . . . . . . . . . . . . . . . .13
DC SERVO MOTORS
Servo Motors Series LA052 Series . . . . . . . . . . . . . . . . . . . . . . .14
Servo Motors Series LA052 Series . . . . . . . . . . . . . . . . . . . . . . .15
STEPPING MOTORS
Holding Torque . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .16
Model SST34D . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .18
Model SST36C . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .19
Model SST40C . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .20
Model SST41D . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .21
Model SST42D . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .22
Model?? SST43D . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .24
Model SST58D . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .26
Model SST59D . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .29
Model SST83D . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .31
Operation and Theory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .32
Driver Information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .38
A COMPANY THAT KEEPS ITS PROMISES . . . . . . . . . . . . . . . . .39

4
6065 BRISTOL PARKWAY, CULVER CITY, CA 90230 • PHONE (310) 693-7600 • TOLL FREE (800) 755-0752 • WWW.SHINANO.COM • E-MAIL: [email protected]
System Solutions From Shinano Kenshi
Solutions only SKC can offer.
Shinano Kenshi Corporation offers a wide range of manufacturing solutions that no one else in the industrycan offer. Shinano now provides solutions through systemapproaches that answer complex modular and systemlevel challenges for its customers. These are solutions that only a company of Shinano Kenshi’s technical andmanufacturing competence could provide.
Shinano Kenshi’s worldwide facilities work together as a synchronized whole enabling every division to takeadvantage of another division’s unique capabilities andexpertise. This has allowed our content value to evolve –from motors, to modules and now toward complete “system” levels. System level designs, tooling, process and assembly details and even test plans.
We can make the whole product.
Shinano Kenshi offers these system solutions at a highlevel of assembly – where Shinano could literally make thewhole product for customers. What’s needed? A productfootprint, an interface and the electrical parameters. Fromthat point, SKC becomes a technical collaborator offeringcustomers a wide range of ideas and solutions. In fact, thecompany is capable of contract manufacturing and customassembly that transcend the typical and often problematicrelationships between CM’s and the companies they are supposed to work for. Why? Because Shinano is technically capable of supporting its customers throughthe entire product life cycle – concept, design, value engineering, production, test and logistics.
For many companies today, contract manufacturing is notworking the way they hoped. Problems stem from many areas,but typically are related to the assembly house not truly understanding the technologies, the people and the businessesinvolved. SKC believes our front-end and back-end relation-ships create greater product knowledge and an atmosphere of trust and accountability… an atmosphere even the biggestassemblers cannot create. But SKC can.
Master the motor, master the product.
SKC knows their customers’ businesses inside and out, so wecan do more for them with accountability across the board.Contract manufacturing and private labeling are other waysShinano is delivering on the economic, design and productionadvantages a system level approach brings to its customers.

5
6065 BRISTOL PARKWAY, CULVER CITY, CA 90230 • PHONE (310) 693-7600 • TOLL FREE (800) 755-0752 • WWW.SHINANO.COM • E-MAIL: [email protected]
System Solutions From Shinano Kenshi
Shinano Kenshi Corporation knows how to take advantage of our global capabilities with total integrationof services and engineering strength to provide solutionsway beyond the motors themselves. Our vertically integrat-ed systems allow us to provide engineering solutions thatour competition simply cannot. Unless you are reallyexpert in the core business, which for us is motors, thenyou cannot provide the total systems solutions that SKCroutinely offers our customers.
Some of the components SKC can apply in a systems solution include the following items built within SKC’s vertically integrated factories and for SKC’s core motorproducts:
• pulleys
• brackets
• worm gears
• custom wire harnesses
• custom integrated connectors
• special brackets
• injection molded parts
• blowers
• lead screws
• gear boxes
Managing the Asian arm.
The Shinano system solution allows customers to maintain all the same points-of-contact, utilizing the same relationshipsthey have enjoyed over the years of doing business withShinano Kenshi. By employing SKC, there are no new partiesto introduce, no new relationships to build. Shinano offers our customers the same people they know and trust. ??
Why Shinano Kenshi is qualified to be the systems solution leader.
• Broad technical and manufacturing expertise across the country and around the world
• Technical collaborator and partner—know how to take your vision to its magnificent conclusion
• Vertical integration – machining & assembly
• A partner who listens and works for our customers
• Consistent and comfortable front-end and back-end relationship
• One unified company with accountable, available, reliable contacts
• 15 year China presence
A future promise of the future we can keep today.
Shinano Kenshi Corporation is ready to take our customers to higher, more efficient and powerful level of manufacturingthan ever before. We are currently doing that for major corporations.
And. It works.

6
6065 BRISTOL PARKWAY, CULVER CITY, CA 90230 • PHONE (310) 693-7600 • TOLL FREE (800) 755-0752 • WWW.SHINANO.COM • E-MAIL: [email protected]
0.000
501000
1500
2000
25003000
35004000
0.0
0.20.4
0.6
0.8
1.01.2
1.4
1.6
0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.10
Torque [N.m]
Current [A]Speed [rpm]
[rpm] [A]
DR-38312 24 ???V
Brushless Motor Series DR-38312 Outer Rotor
Specifications
(57)
49.5 ± 0.2
*24 max
(23)
28 max
Lot No.
300
Min
.30
0M
in.
ø14
±0.
2 ø4±
0.2
ø38
±0.
2
ø16
30m
ax(1
9)
2ø3 ± 0.1
Connector52207-1490 or Equivalent(MULEX)
8 ø ± 0.3
2 ± 0.2
OOOOOG
0.000
1000
2000
3000
4000
5000
6000
7000
0.0
0.20.4
0.6
0.8
1.01.2
1.4
1.6
0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.10
Torque [N.m]
Current [A]Speed [rpm]
[rpm] [A]
DR-38312 48 V
0.6 kgf-cm38 mm2000 rpmConstant speedIntegral drive
Specifications
Speed-Torque Characteristics
- Connector Pin Assignment
ø14
±0.
2 ø4±
0.2
8 ø ± 0.3
2
(57)
49.5 ± 0.2
*24 max
(23)
28 max
Lot No.
300
Min
.30
0M
in.
ø14
±0.
2 ø4±
0.2
ø38
±0.
2
ø16
30m
ax(1
9)
2ø3 ± 0.1
Connector52207-1490 or Equivalent(MULEX)
8 ø ± 0.3
2 ± 0.2
OOOOOG
0.000
501000
1500
2000
25003000
35004000
0.0
0.20.4
0.6
0.8
1.01.2
1.4
1.6
0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.10
Torque [N.m]
Current [A]Speed [rpm]
[rpm] [A]
DR-38312 24 ???V
Brushless Motor Series DR-38312 Outer Rotor Type
Specifications
(57)
49.5 ± 0.2
*24 max
(23)
28 max
Lot No.
300
Min
.30
0M
in.
ø14
±0.
2 ø4±
0.2
ø38
±0.
2
ø16
30m
ax(1
9)
2ø3 ± 0.1
Connector52207-1490 or Equivalent(MULEX)
8 ø ± 0.3
2 ± 0.2
OOOOOG
0.000
1000
2000
3000
4000
5000
6000
7000
0.0
0.20.4
0.6
0.8
1.01.2
1.4
1.6
0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.10
Torque [N.m]
Current [A]Speed [rpm]
[rpm] [A]
DR-38312 48 V
Specifications
Speed-Torque Characteristics
- Connector Pin AssignmentNumber Function Number Function
1 C 3– 8 C 1–
2 C 3+ 9 W 1
3 H bias + 10 W !
4 H bias – 11 W 2
5 C 2+ 12 W 2
6 C 2 – 13 W 3
7 C 1 + 14 W 3
ELECTRICAL CHARACTERISTICS
RATED POWER W 10
RATED VOLTAGE VDC 24
RATED LOAD N-cm 5.9
kgf-cm 0.6
RATED SPEED rpm 2000 ±.1% (controlled)
RATED CURRENT A (max.) 1A
??? BREAKDOWN TORQUE N-cm (min) 17.7
Kgf-cm (min) 1.8
NO LOAD SPEED rpm 3300
LIFE hours (typical) 10,000 (at rated load, voltage)
TEMPERATURE RISE C (max.) 40 (at rated load, voltage)
CONNECTOR
HEADER – FPC
ROTATION
DIRECTION CW/CCW CW
ø14
±0.
2 ø4±
0.2
8 ø ± 0.3
2
(57)
49.5 ± 0.2
*24 max
(23)
28 max
Lot No.
300
Min
.30
0M
in.
ø14
±0.
2 ø4±
0.2
ø38
±0.
2
ø16
30m
ax(1
9)
2ø3 ± 0.1
Connector52207-1490 or Equivalent(MULEX)
8 ø ± 0.3
2 ± 0.2
OOOOOG
RoHS compliant

7
6065 BRISTOL PARKWAY, CULVER CITY, CA 90230 • PHONE (310) 693-7600 • TOLL FREE (800) 755-0752 • WWW.SHINANO.COM • E-MAIL: [email protected]
Brushless Motor Series DR-5238-007 Outer Rotor Type
Specifications
SST39C1030
Specifications
Speed-Torque Characteristics
- Connector Pin Assignment DR-5238-007
500 gf-cm52mm1000 rpmConstant speedIntegral drive
Specifications
Speed-Torque Characteristics
- Connector Pin AssignmentNumber Function
1 VDC: 24 V
2 GND
3 On/Off (Low Start)
4 Lock Signal: Open Collector
ELECTRICAL CHARACTERISTICS
RATED POWER W 5.1
RATED VOLTAGE VDC 24
RATED LOAD N-cm 4.9
gf-cm 500
RATED SPEED rpm 1,000 ±.1% (controlled)
RATED CURRENT mA (max.) 750
BREAKDOWN TORQUE gf-cm (min.) 550 (at 21.6 V)
NO LOAD SPEED rpm 1,000
LIFE hours (typical) 10,000 (at rated load, voltage)
ACOUSTIC NOISE dB(A) 50 (at distance of 1 m)
TEMPERATURE RISE C (max.) 50 (at rated load, voltage)
CONNECTOR
HEADER – AMP p/n 175487-4 (white)
ROTATION
DIRECTION CCW (facing at shaft)
RoHS compliant

8
6065 BRISTOL PARKWAY, CULVER CITY, CA 90230 • PHONE (310) 693-7600 • TOLL FREE (800) 755-0752 • WWW.SHINANO.COM • E-MAIL: [email protected]
SST39C1030 DRIVER : TYPE A (C = 1 µF, R = 0) VOLTAGE : Vw = 11 V
EXCITING MODE = 2 Phase INERTIAL LOAD : 3 g-cm2
Brushless Motor Series DR-6236-152 Outer Rotor Type
Specifications
DR-6236-152
1 kgf-cm62mm1500 rpmConstant speedIntegral drive
Specifications
Speed-Torque Characteristics
- Connector Pin AssignmentNumber Function
1 VDC: 24 V
2 GND
3 On/Off (Low Start)
4 Lock Signal: Open Collector
ELECTRICAL CHARACTERISTICS
RATED POWER W 15
RATED VOLTAGE VDC 24
RATED LOAD N-cm 9.8
kgf-cm 1
RATED SPEED rpm 1,500 ±.1% (controlled)
RATED CURRENT A (max.) 1.4
BREAKDOWN TORQUE N-cm (min.) 9.3 (at 21.6 V)
gf-cm (min.) 950 (at 21.6 V)
NO LOAD SPEED rpm 1,500
LIFE hours (typical) 10,000 (at rated load, voltage)
ACOUSTIC NOISE dB(A) 45 (at distance of 1 m)
TEMPERATURE RISE C (max.) 65 (at rated load, voltage)
CONNECTOR
HEADER – AMP p/n 175487-4 (white)
ROTATION
DIRECTION CCW (facing at shaft)
RoHS compliant

9
6065 BRISTOL PARKWAY, CULVER CITY, CA 90230 • PHONE (310) 693-7600 • TOLL FREE (800) 755-0752 • WWW.SHINANO.COM • E-MAIL: [email protected]
SST39C1030 DRIVER : TYPE A (C = 1 µF, R = 0) VOLTAGE : Vw = 11 V
EXCITING MODE = 2 Phase INERTIAL LOAD : 3 g-cm2
Brushless Motor Series DR-8738-252 Outer Rotor Type
Specifications
DR-8738-252
Specifications
Speed-Torque Characteristics
- Connector Pin Assignment
ELECTRICAL CHARACTERISTICS
RATED VOLTAGE VDC 24
VCC VDC 5
RATED LOAD N-m 0.343
kgf-cm 3.5
RATED SPEED rpm 1,500 ± 0.1% (controlled)
RATED CURRENT A (max.) 5.0
BREAKDOWN TORQUE N-cm (min.) 0.39 (at 21.6 V)
kgf-cm (min.) 4.0 (at 21.6 V)
NO LOAD SPEED rpm 1,500
LIFE hours (typical) 10,000 (at rated voltage, rated load)
ACOUSTIC NOISE dB(A) (max.) 45 (at distance of 1 m)
TEMPERATURE RISE C (max.) 75 (at rated load, rated voltage)
CONNECTOR
HEADER - AMP p/n 53053-0610 (white)
ROTATION
DIRECTION CW/CCW CW (facing at shaft)
Number Function
1 VDC: 24 V (coil)
2 GND (VDC)
3 GND (VCC)
4 VCC: 5 V (logic)
5 On/Off (Low Start)
6 Lock Signal: Open Collector
3.5 kgf-cm87mm1500 rpmConstant speedIntegral drive
RoHS compliant

10
6065 BRISTOL PARKWAY, CULVER CITY, CA 90230 • PHONE (310) 693-7600 • TOLL FREE (800) 755-0752 • WWW.SHINANO.COM • E-MAIL: [email protected]
Brushless Motor Series DR-6634-514 Inner Rotor Type
Specifications
DR-6634-514
110 gf-cm66 mm3200 rpmVariable speedIntegral drive
Specifications
Speed-Torque Characteristics
ELECTRICAL CHARACTERISTICS
RATED VOLTAGE VDC 7 to 40 (operating range)
VCC VDC 12 ± 1.2 (logic level)
RATED LOAD gf-cm 110
RATED SPEED rpm 3,200 ± 320 (at 26.5 V)
RATED CURRENT A (max.) 0.35 (at 26.5 V)
NO LOAD SPEED rpm 3,850 (nominal)
LIFE hours (typical) 10,000 (at less than 45 C ambient)
ENCODER
TYPE - magnetic encoder
RESOLUTION pulse/rev. 2
OUTPUT LEVEL V (high) 11.0 ± 1.0
V (low) 0 to 0.5
DUTY CYCLE % 66.7 ± 20
WINDING RESISTANCE V 5.4 (nominal)
CONNECTOR
- JST p/n S4B-EH
ROTATION
DIRECTION CCW (facing at shaft)
- Connector Pin AssignmentNumber Function
1 Encoder Out
2 VCC: 12 V
3 GND
4 VDC: 7 to 40 V
RoHS compliant

11
6065 BRISTOL PARKWAY, CULVER CITY, CA 90230 • PHONE (310) 693-7600 • TOLL FREE (800) 755-0752 • WWW.SHINANO.COM • E-MAIL: [email protected]
Brushless Motor Series DR-8538-555/ 888 Inner Rotor Type
Specifications
1400 gf-cm85 mm2700 rpmVariable speedIntegral drive
Specifications
DR-8538-888 Speed-Torque Characteristics
ELECTRICAL CHARACTERISTICS DR-8538-555 DR-8538-888
RATED VOLTAGE VDC 10 to 40 (operating range) 90 to 178 (operating voltage)
VCC VDC 12 ± 1.2 (logic level) 15 ± 1.5 (logic level)
RATED LOAD gf-cm 1,200 1,400
RATED SPEED rpm 2,000 ± 250 (at 34 V) 2,700 ± 300 (at 160 V)
RATED CURRENT A (max.) 1.4 (at 34 V) 0.44 (at 160 V)
SPEED CONTROL INPUT V - 0 to 6.5
NO LOAD SPEED rpm 3,000 (nominal) 4,000 (nominal)
NO LOAD CURRENT mA 200 (nominal) 50 (nominal)
TORQUE CONSTANT g-cm/A 1,250 4,550 (nominal)
LIFE hours (min.) 10,000 (at less than 45 C ambient) 10,000 (at less than 45 C ambient)
ENCODER
TYPE - magnetic encoder magnetic encoder
RESOLUTION pulse/rev. 4 12
OUTPUT LEVEL V (high) 11.0 ± 1.0 1 4.0 ± 1.0
V (low) 0 to 0.5 0 to 1.0
DUTY CYCLE % 66.7 ± 20 50 ± 20
CONNECTOR
NONE - (flying wires) (flying wires)
LEAD WIRE - UL-1430, AWG #22 UL-1430, AWG #22
ROTATION
DIRECTION CCW (facing at shaft) (facing at shaft)
- DR-8538-555 Connector Pin Assignment
Number Function
1 VDC: 24 V
2 GND
3 On/Off (Low Start)
4 Lock Signal: Open Collector
- DR-8538-888 Connector Pin Assignment
Number Function
1 VDC: 24 V
2 GND
3 On/Off (Low Start)
4 Lock Signal: Open Collector
DR-8538-555 Speed-Torque Characteristics
DR-8538-888DR-8538-555
RoHS compliant

12
6065 BRISTOL PARKWAY, CULVER CITY, CA 90230 • PHONE (310) 693-7600 • TOLL FREE (800) 755-0752 • WWW.SHINANO.COM • E-MAIL: [email protected]
SpecificationsSpecificationsELECTRICAL CHARACTERISTICS
RATED VOLTAGE DCV 12
RATED TORQUE mNm 0.5
RATED SPEED rpm 11000
RATED CURRENT A 0.18
Speed-Torque Characteristics
DR-14312
SpecificationsSpecificationsELECTRICAL CHARACTERISTICS
RATED VOLTAGE DCV 12
RATED TORQUE mNm 1
RATED SPEED rpm 12000
RATED CURRENT A 0.25
Speed-Torque Characteristics
DR-20312
SpecificationsSpecificationsELECTRICAL CHARACTERISTICS
RATED VOLTAGE DCV 12
RATED TORQUE mNm 3
RATED SPEED rpm 22000
RATED CURRENT A 0.11
Speed-Torque Characteristics
DR-24312
Brushless Motor Series Outer Rotor Type
All models on this page are RoHS compliant

13
6065 BRISTOL PARKWAY, CULVER CITY, CA 90230 • PHONE (310) 693-7600 • TOLL FREE (800) 755-0752 • WWW.SHINANO.COM • E-MAIL: [email protected]
SpecificationsSpecificationsELECTRICAL CHARACTERISTICS
RATED VOLTAGE DCV 12
RATED TORQUE mNm 6
RATED SPEED rpm 1400
RATED CURRENT A 0.16
Speed-Torque Characteristics
DR-29312
SpecificationsSpecificationsELECTRICAL CHARACTERISTICS
RATED VOLTAGE DCV 12
RATED TORQUE mNm 23
RATED SPEED rpm 5700
RATED CURRENT A 1.8
Speed-Torque Characteristics
DR-4734
SpecificationsSpecificationsELECTRICAL CHARACTERISTICS
RATED VOLTAGE DCV 24
RATED TORQUE mNm 220
RATED SPEED rpm 1800
RATED CURRENT A 3.0
Speed-Torque Characteristics
DR-7638
Brushless Motor Series Outer Rotor Type
All models on this page are RoHS compliant

14
6065 BRISTOL PARKWAY, CULVER CITY, CA 90230 • PHONE (310) 693-7600 • TOLL FREE (800) 755-0752 • WWW.SHINANO.COM • E-MAIL: [email protected]
Servo Motor Series LA052 NEMA 23
24-75 VDC,400 ppr encoder,NEMA 23 mounting
SpecificationsSpecificationsPARAMETER UNITS LA052-040E LA052-080E LA052-110E
RATED POWER W 40 80 110
RATED VOLTAGE VDC 24 75 24 75 75
RATED SPEED rpm 3,000 3,000 3,000
RATED TORQUE N-cm 12.7 2.7 25.5 25.5 35.3
kgf-cm 1.3 1.3 2.6 2.6 3.6
RATED CURRENT A 2.5 0.9 4.6 1.8 2.1
TORQUE CONSTANT N-cm/A 5.0 14.8 5.9 19.1 19.6
kgf-cm/A 0.51 1.51 0.6 1.95 2.00
BACK EMF CONSTANT V/krpm 5.2 15.5 6.2 20.0 20.5
PHASE RESISTANCE W 1.18 11.0 0.60 6.2 3.71
PHASE INDUCTANCE mH 4.4 42 1.4 14 9.1
INSTANTANEOUS PEAK TORQUE N-cm 38.2 38.2 76.5 76.5 105.9
kgf-cm 3.9 3.9 7.8 7.8 10.8
MAX SPEED rpm 5,000 5,000 5,000
ROTOR INERTIA g-cm2 87 87 91 91 166
(TYPE 2*) g-cm2 110 110 117 117 18
POWER RATE kW/s 1.87 1.87 7.14 7.14 8.48
(TYPE 2*) kW/s 1.48 1.48 5.56 5.56 6.74
MECHANICAL TIME CONSTANT ms 4.1 4.4 4.6 1.5 1.6
(TYPE 2*) ms 5.2 5.5 2.0 2.0 1.8
ELECTRICAL TIME CONSTANT ms 3.7 3.8 2.3 2.3 2.5
MASS k g 0.6 0.6 0.6 0.6 0.8
SpecificationsEncoder SpecificationsTYPE TYPE 2 ENCODER
OUTPUT CIRCUIT UNITS OPEN COLLECTOR TTL COMPATIBLE
RESOLUTION P/R - 200, 400
NUMBER OF CHANNELS - C1, C2, C3 A, B
POWER SUPPLY VDC 5 ± 5% 5 ± 5%
CONSUMPTION CURRENT mA (max.) 40 50
OUTPUT VOLTAGE VDC 14.4 (max.), VOH = 2.4 (min.),
(lsink = 15 mA) VOL = 0.4 (max.), (lsink = 15 mA)
PHASE OFFSET - - a, b, c, d = 90º ± 45º
SIG. Z PULSE WIDTH - - -
FREQUENCY RESPONSE kHz (min.) - 20
OPERATING TEMPERATURE RANGE º C 0 ~ 60 (temperature inside of encoder)
The above values are measured with Aluminum Plate of 200 x 200 x 6 mm. * See Encoder Specification below
HALL SENSOR
RoHS compliant

15
6065 BRISTOL PARKWAY, CULVER CITY, CA 90230 • PHONE (310) 693-7600 • TOLL FREE (800) 755-0752 • WWW.SHINANO.COM • E-MAIL: [email protected]
Servo Motor Series LA052 NEMA 23
24-75 VDC,400 ppr encoder,NEMA 23 mounting
- Motor Length
Motor Type Type 2
LA052-040E 86.1
LA052-080E 86.1
LA052-110E 106.1
CW Rotation viewed from Output Shaft EndEncoder Output Phase
Available in NEMA-23 Mounting
RoHS compliant

16
6065 BRISTOL PARKWAY, CULVER CITY, CA 90230 • PHONE (310) 693-7600 • TOLL FREE (800) 755-0752 • WWW.SHINANO.COM • E-MAIL: [email protected]
Stepper Motor Holding Torque Range
STEP ANGLE0.9o
STEP ANGLE1.8o
SST-36C1
100 200 300 500 600 700
0 5 10 15 20 40 50
STEP MOTOR HOLDING TORQUE RANGE
SST-40C1
SST-40C2
SST-42D1
SST-42D2
SST-58D1
SST-58D2
SST-58D3
SST-58D4SST-58D5
SST-83D1
SST-43D1
SST-59D1
SST-59D3
SST-59D5
SST-41D0
SST-34D1
SST-43D2
SST-36C0

17
6065 BRISTOL PARKWAY, CULVER CITY, CA 90230 • PHONE (310) 693-7600 • TOLL FREE (800) 755-0752 • WWW.SHINANO.COM • E-MAIL: [email protected]
Stepper Motor Holding Torque Range
300 500 600 700 oz-in
20 40 50 kgf-cm
SST-83D3
SST-83D2

18
6065 BRISTOL PARKWAY, CULVER CITY, CA 90230 • PHONE (310) 693-7600 • TOLL FREE (800) 755-0752 • WWW.SHINANO.COM • E-MAIL: [email protected]
0
60
50
40
30
10
10
0
TORQ
UE(m
N–m
)
FREQUENCY (pps)500 1000 1500 2000 2500 3000 3500 4000
SST34D
Stepper Motor Series SST34D Size 14
4 lead wire23.6mmL 1.8o?? step
MODEL STEP VOLTAGE CURRENT RESISTANCE INDUCTANCE HOLDING ROTOR NUMBER WEIGHT DIMENSIONANGLE TORQUE INERTIA OF LEADS
SINGLE SHAFT DEG. V A/Phase Ω/Phase mH/Phase kg-cm g-cm2 LEAD kg L
SST34D1070 1.8 2.7 0.7 3.9 4.4 0.6 8.1 4 0.11 24
Typical Performance –– ?Pull Out - - - Pull In
Refer to page 39 for Driver
RoHS compliant

19
6065 BRISTOL PARKWAY, CULVER CITY, CA 90230 • PHONE (310) 693-7600 • TOLL FREE (800) 755-0752 • WWW.SHINANO.COM • E-MAIL: [email protected]
50.84 L15. ± 0.6Shaft Lenght
2.3 ± 0.2
ø16
±0.
2
5±
3
ø36
300
Min
.
ø4.7
62
21.3 Max.
(Screw Protrusion)
43.84
27.1
(2-M2 x 0.4)
(2-M3 x 0.5-6h)
(1.56)
Label
0.02
5
00
5
10
15
20
25
30
35
40
500 1000 1500 2000 2500 3000 3500 4000FREQUENCY (pps)
TORQ
UE(m
N–m
)
SST36C1050 DRIVER : MTD2005 CURRENT = 0.45 A/PhaseEXCITING MODE = 2 Phase INERTIAL LOAD : 3 g-cm2
Stepper Motor Series SST36C Size 17
4 Lead Wire36mmL, 0.9o step
MODEL STEP VOLTAGE CURRENT RESISTANCE INDUCTANCE HOLDING ROTOR NUMBER WEIGHT DIMENSIONANGLE TORQUE INERTIA OF LEADS
SINGLE SHAFT DEG. V A/Phase Ω/Phase mH/Phase kg-cm g-cm2 LEAD kg L
SST36C0030 0.9 5 0.30 16.8 8.5 0.36 7.3 4 0.05 12.35
SST36C1050 0.9 5 0.45 11.5 9 0.86 19 4 0.09 ????19.7
Typical Performance –– ?Pull Out - - - Pull In
Refer to page 39 for Driver
RoHS compliant
Mounting configuration for variable NEMA sizes
00
10
20
30
40
50
60
70
80
500 1000 1500 2000 2500 3000 3500 4000FREQUENCY (pps)
TORQ
UE(m
N–m
)
SST36C0030 DRIVER : MTD2005 CURRENT = 0.30 A/PhaseEXCITING MODE = 2 Phase INERTIAL LOAD : 3 g-cm2

20
6065 BRISTOL PARKWAY, CULVER CITY, CA 90230 • PHONE (310) 693-7600 • TOLL FREE (800) 755-0752 • WWW.SHINANO.COM • E-MAIL: [email protected]
SST40C1010 DRIVER : SDU2201 CURRENT = 0.8 A/Phase
EXCITING MODE = 2 Phase INERTIAL LOAD : 3 g-cm2
SST40C1020 DRIVER : TYPE A (C = 1 µF, R = 0) VOLTAGE : Vw = 12 V
EXCITING MODE = 2 Phase NERTIAL LOAD : 3 g-cm2
Stepper Motor Series SST40C Size 17
6 Lead Wire31mm, 37mmL0.9o step
MODEL STEP VOLTAGE CURRENT RESISTANCE INDUCTANCE HOLDING ROTOR NUMBER WEIGHT DIMENSIONANGLE TORQUE INERTIA OF LEADS
SINGLE SHAFT DOUBLE SHAFT DEG. V A/Phase Ω/Phase mH/Phase kg-cm g-cm2 LEAD kg L
SST40C1010 SST40C1011 0.9 4 0.8 5 5 1.15 17 6 0.17 31
SST40C1020 SST40C1021 0.9 9.6 0.4 24 26 1.20 17 6 0.17 31
SST40C1030 SST40C1031 0.9 11.2 0.3 37.5 37.7 1.25 17 6 0.17 31
SST40C2010 SST40C2011 0.9 6 0.8 7.5 11 1.85 27 6 0.2 37
SST40C2020 SST40C2021 0.9 8.6 0.56 15 23 1.79 27 6 0.2 37
SST40C2030 SST40C2031 0.9 12 0.4 30 44 1.67 27 6 0.2 37
Typical Performance Refer to page 30 for Driver –– Pull Out - - - Pull In
SST40C1020 DRIVER : TD-112 CURRENT = 0.4 A/Phase
EXCITING MODE = 2 Phase INERTIAL LOAD : 3 g-cm2
SST40C1010 DRIVER : TYPE B SUPPLY : Vs = 24 V
CURRENT = 0.8 A/Phase EXCITING MODE = 2 Phase
INERTIAL LOAD : 3 g-cm2
RoHS compliant

21
6065 BRISTOL PARKWAY, CULVER CITY, CA 90230 • PHONE (310) 693-7600 • TOLL FREE (800) 755-0752 • WWW.SHINANO.COM • E-MAIL: [email protected]
Stepper Motor Series SST40C, SST41D Size 17
6 Lead Wire31mm, 37mmL0.9o step
SST40C2030 DRIVER : SDU2201 CURRENT = 0.4 A/Phase
EXCITING MODE = 2 Phase INERTIAL LOAD : 3 g-cm2
SST40C2030 DRIVER : TYPE A (C = 1 µF, R = 0) VOLTAGE : Vw = 12 V
EXCITING MODE = 2 Phase INERTIAL LOAD : 3 g-cm2
SST40C2020 DRIVER : SDU2201 CURRENT = 0.56 A/Phase
EXCITING MODE = 2 Phase INERTIAL LOAD : 3 g-cm2
SST40C1030 DRIVER : TYPE A (C = 1 µF, R = 0) VOLTAGE : Vw = 11.2 V
EXCITING MODE = 2 Phase INERTIAL LOAD : 3 g-cm2
Model SST41D4 Lead Wire22mmL, 1.8o step
SpecificationsMODEL STEP VOLTAGE CURRENT RESISTANCE INDUCTANCE HOLDING ROTOR NUMBER WEIGHT DIMENSION
ANGLE TORQUE INERTIA OF LEADS
DEG. V A/Phase Ω/Phase mH/Phase kg-cm g-cm2 LEAD kg L
SST41D0100 1.8 2.3 1.0 2.3 3.9 1.2 20.3 4 0.15 22
0 1000 2000 3000 4000 5000
20
40
60
80
100
120
0
TORQ
UE(m
N–m
)
FREQUENCY (pps)
–– Pull Out - - - Pull In
RoHS compliant
SST40C2010 DRIVER : TYPE B SUPPLY : Vs = 24 V
CURRENT = 0.8 A/Phase EXCITING MODE = 2 Phase
INERTIAL LOAD : 3 g-cm2

22
6065 BRISTOL PARKWAY, CULVER CITY, CA 90230 • PHONE (310) 693-7600 • TOLL FREE (800) 755-0752 • WWW.SHINANO.COM • E-MAIL: [email protected]
SST42D1020 DRIVER : TYPE A (C = 1 µF) VOLTAGE : Vs = 24 VEXCITING MODE = 2 Phase INERTIAL LOAD : 3 g-cm2
SST42D1040 DRIVER : TYPE B SUPPLY : Vs = 24 V
CURRENT = 0.38 A/Phase EXCITING MODE = 2 Phase
INERTIAL LOAD : 3 g-cm2
Stepper Motor Series SST42D Size 17
6 Lead Wire31mm, 38mmL1.8o step
MODEL STEP VOLTAGE CURRENT RESISTANCE INDUCTANCE HOLDING ROTOR NUMBER WEIGHT DIMENSIONANGLE TORQUE INERTIA OF LEADS
SINGLE SHAFT DOUBLE SHAFT DEG. V A/Phase Ω/Phase mH/Phase kg-cm g-cm2 LEAD kg L
SST42D1100 SST42D1101 1.8 3.7 0.95 3.9 3.6 1.9 27 6 0.18 31
SST42D1070 SST42D1071 1.8 5.3 0.7 7.6 6.8 1.9 27 6 0.18 31
SST42D1040 SST42D1041 1.8 10.5 0.35 30 21.7 1.7 27 6 0.18 31
SST42D1020 SST42D1021 1.8 16.5 0.22 75 53.0 1.7 27 6 0.18 31
SST42D2120 SST42D2121 1.8 3.7 1.2 3.1 4.2 3.2 48 6 0.27 38
SST42D2090 SST42D2091 1.8 5.1 0.9 5.7 6.8 3.2 48 6 0.27 38
SST42D2070 SST42D2071 1.8 6.7 0.7 9.5 11.8 3.2 48 6 0.27 38
SST42D2040 SST42D2041 1.8 12.0 0.4 30 34.3 3.2 48 6 0.27 38
SST42D2030 SST42D2031 1.8 18.8 0.25 75 72.8 3.0 48 6 0.27 38
Typical Performance Refer to page 39 for Driver –– Pull Out - - - Pull In
SST42D1070 DRIVER : TYPE B SUPPLY : Vs = 24 V
CURRENT = 0.7 A/Phase EXCITING MODE = 2 Phase
INERTIAL LOAD : 3 g-cm2
SST42D1100 DRIVER : TYPE B SUPPLY : Vs = 24 V
CURRENT = 0.95 A/Phase EXCITING MODE = 2 Phase
INERTIAL LOAD : 3 g-cm2
RoHS compliant

23
6065 BRISTOL PARKWAY, CULVER CITY, CA 90230 • PHONE (310) 693-7600 • TOLL FREE (800) 755-0752 • WWW.SHINANO.COM • E-MAIL: [email protected]
Stepper Motor Series SST42D Size 17
6 Lead Wire31mm, 38mmL1.8o step
SST42D2070 DRIVER : TYPE A (C = 1 µF, R = 0) VOLTAGE : Vw = 12 V
EXCITING MODE = 2 Phase INERTIAL LOAD : 3 g-cm2
SST42D2040 DRIVER : SDU2201 CURRENT = 0.8 A/Phase
EXCITING MODE = 2 Phase INERTIAL LOAD : 3 g-cm2
SST42D2120 DRIVER : TYPE A (C = 1 µF, R = 0) VOLTAGE : Vw = 9.6 V
EXCITING MODE = 2 Phase INERTIAL LOAD : 3 g-cm2
SST42D2090 DRIVER : TYPE A (C = 1 µF, R = 0) VOLTAGE : Vw = 17 V
EXCITING MODE = 2 Phase INERTIAL LOAD : 3 g-cm2

24
6065 BRISTOL PARKWAY, CULVER CITY, CA 90230 • PHONE (310) 693-7600 • TOLL FREE (800) 755-0752 • WWW.SHINANO.COM • E-MAIL: [email protected]
SST43D1040
0
50
100
150
200
0 1000 2000 3000
FREQUENCY (pps)
)m-
Nm(
EU
QR
OT
Pull-out
Pull-in
SST43D1040 DRIVER : Constant current VOLTAGE : 24 VDCCurrent: 0.4 A/phase INERTIAL LOAD : 3 g-cm2
SST43D1080
0
50
100
150
200
0 1000 2000 3000 4000 5000
FREQUENCY (pps)
)m-
Nm(
EU
QR
OT
Pull-out
Pull-in
SST43D1060
0
50
100
150
200
0 1000 2000 3000 4000
FREQUENCY (pps)
)m-
Nm(
EU
QR
OT
Pull-out
Pull-in
SST43D1060 DRIVER : Constant current VOLTAGE : 24 VDCCurrent: 0.6 A/phase INERTIAL LOAD : 3 g-cm2
Stepper Motor Series SST43D Size 17
IntegralConnector 6 Pin34mm, 40mmL1.8o stepLow Noise, Low Vibration,High Torque
SpecificationsMODEL STEP VOLTAGE CURRENT RESISTANCE INDUCTANCE HOLDING ROTOR NUMBER WEIGHT DIMENSION
ANGLE TORQUE INERTIA OF LEADS
SINGLE SHAFT DEG. V A/Phase Ω/Phase mH/Phase kg-cm g-cm2 LEAD kg L
SST43D1040 1.8 9.6 0.4 24.0 16.0 180 33 6 0.23 34
SST43D1060 1.8 6.9 0.6 11.5 8.1 190 33 6 0.23 34
SST43D1080 1.8 5.1 0.8 6.4 4.9 200 33 6 0.23 34
SST43D1100 1.8 4.2 1.0 4.2 3.3 200 33 6 0.23 34
SST43D1120 1.8 3.2 1.2 2.7 2.3 200 33 6 0.23 34
SST43D1150 1.8 2.7 1.5 1.8 1.5 200 33 6 0.23 34
SST43D2040 1.8 12.0 0.4 30.0 24.0 260 56 6 0.29 40
SST43D2060 1.8 7.2 0.6 12.0 11.8 260 56 6 0.29 40
SST43D2080 1.8 5.5 0.8 6. 7.1 26 56 6 0.29 40
SST43D2100 1.8 4.8 1.0 4.8 4.8 270 56 6 0.29 40
SST43D2120 1.8 4.0 1.2 3.3 3.6 280 56 6 0.29 40
SST43D2140 1.8 3.2 1.4 2.3 2.5 280 56 6 0.29 40
SST43D2160 1.8 3.0 1.6 1.9 1.8 260 56 6 0.29 40
Typical Performance Refer to page 30 for Driver –– Pull Out - - - Pull In
SST43D108???0 DRIVER : Constant current VOLTAGE : 24 VDCCurrent: ?0.8 A/phase INERTIAL LOAD : 3 g-cm2
RoHS compliant
SST43D1100
0
50
100
150
200
0 1000 2000 3000 4000 5000 6000
FREQUENCY (pps)
)m-
Nm(
EU
QR
OT
Pull-out
Pull-in
SST43D1100 DRIVER : Constant current VOLTAGE : 24 VDCCurrent: 1.0 A/phase INERTIAL LOAD : 3 g-cm2

25
6065 BRISTOL PARKWAY, CULVER CITY, CA 90230 • PHONE (310) 693-7600 • TOLL FREE (800) 755-0752 • WWW.SHINANO.COM • E-MAIL: [email protected]
Stepper Motor Series SST43D Size 17
IntegralConnector 6 Pin34mm, 40mmL1.8o stepLow Noise, Low Vibration,High Torque
SST43D2040
0
50
100
150
200
250
300
0 1000 2000 3000
FREQUENCY (pps)
TOR
QU
E(m
N-m
) Pull-out
Pull-in
SST43D2040 DRIVER : Constant current VOLTAGE : 24 VDCCurrent: 0.4 A/phase INERTIAL LOAD : 3 g-cm2
SST43D2060
0
50
100
150
200
250
300
0 1000 2000 3000 4000
FREQUENCY (pps)
TOR
QU
E(m
N-m
) Pull-out
Pull-in
SST43D2060 DRIVER : Constant current VOLTAGE : 24 VDCCurrent: 0.6 A/phase INERTIAL LOAD : 3 g-cm2
SST43D1120
0
50
100
150
200
0 1000 2000 3000 4000 5000 6000 7000
FREQUENCY (pps)
)m-
Nm(
EU
QR
OT
Pull-out
Pull-in
SST43D1120 DRIVER : Constant current VOLTAGE : 24 VDCCurrent: 1.2 A/phase INERTIAL LOAD : 3 g-cm2
SST43D1150
0
50
100
150
200
0 1000 2000 3000 4000 5000 6000 7000 8000
FREQUENCY (pps)
)m-
Nm(
EU
QR
OT
Pull-out
Pull-in
SST43D1150 DRIVER : Constant current VOLTAGE : 24 VDCCurrent: 1.5 A/phase INERTIAL LOAD : 3 g-cm2
SST43D2080
0
50
100
150
200
250
300
0 1000 2000 3000 4000 5000
FREQUENCY (pps)
TOR
QU
E(m
N-m
) Pull-out
Pull-in
SST43D2080 DRIVER : Constant current VOLTAGE : 24 VDCCurrent: 0.8 A/phase INERTIAL LOAD : 3 g-cm2
SST43D2100
0
50
100
150
200
250
300
0 1000 2000 3000 4000 5000 6000
FREQUENCY (pps)
TOR
QU
E(m
N-m
) Pull-out
Pull-in
SST43D2100 DRIVER : Constant current VOLTAGE : 24 VDCCurrent: 1.0 A/phase INERTIAL LOAD : 3 g-cm2
PIN?OUT CHART
1 2 3 4 5 6
A B B A A BCOM COM
SST43D2120
0
50
100
150
250
300
0 1000 2000 3000 4000 5000 6000 7000
FREQUENCY (pps)
TORQ
UE
(mN
-m)
Pull-out
Pull-in
SST43D2120 DRIVER : Constant current VOLTAGE : 24 VDCCurrent: 1.2 A/phase INERTIAL LOAD : 3 g-cm2
SST43D2140
0
50
100
150
200
250
300
0 1000 2000 3000 4000 5000 6000 7000
FREQUENCY (pps)
TORQ
UE
(mN
-m) Pull-out
Pull-in
SST43D2140 DRIVER : Constant current VOLTAGE : 24 VDCCurrent: 1.4 A/phase INERTIAL LOAD : 3 g-cm2
SST43D2160
0
50
100
150
200
250
300
0 1000 2000 3000 4000 5000 6000 7000 8000
FREQUENCY (pps)
TORQ
UE
(mN
-m) Pull-out
Pull-in
SST43D2160 DRIVER : Constant current VOLTAGE : 24 VDCCurrent: 1.6 A/phase INERTIAL LOAD : 3 g-cm2

26
6065 BRISTOL PARKWAY, CULVER CITY, CA 90230 • PHONE (310) 693-7600 • TOLL FREE (800) 755-0752 • WWW.SHINANO.COM • E-MAIL: [email protected]
Stepper Motor Series SST58D Size 23
8 Lead Wire42mm, 49mm,54mm, 65mm,77mmL1.8o step
SpecificationsMODEL STEP VOLTAGE CURRENT RESISTANCE INDUCTANCE HOLDING ROTOR NUMBER WEIGHT DIMENSION
ANGLE TORQUE INERTIA OF LEADS
SINGLE SHAFT DOUBLE SHAFT DEG. V A/Phase Ω/Phase mH/Phase kg-cm g-cm2 LEAD kg L
SST58D1810 SST58D1811 1.8 5.0 1.0 5.0 5.4 3.7 135 8 0.49 42
SST58D1820 SST58D1821 1.8 2.4 2.0 1.2 1.3 3.7 135 8 0.49 42
SST58D1830 SST58D1831 1.8 1.5 3.0 0.5 0.54 3.7 135 8 0.49 42
SST58D2810 SST58D2811 1.8 6.2 1.0 6.2 9.7 6.4 230 8 0.6 49
SST58D2820 SST58D2821 1.8 3.0 2.0 1.5 2.6 6.4 230 8 0.6 49
SST58D2830 SST58D2831 1.8 2.2 3.0 0.73 1.1 6.4 230 8 0.6 49
SST58D3810 SST58D3811 1.8 6.9 1.0 6.9 14.0 7.3 290 8 0.71 54
SST58D3820 SST58D3821 1.8 3.4 2.0 1.7 3.6 7.3 290 8 0.71 54
SST58D3830 SST58D3831 1.8 2.1 3.0 0.7 1.3 7.3 290 8 0.71 54
SST58D4810 SST58D4811 1.8 7.2 1.0 7.2 12.0 9.2 330 8 0.86 65
SST58D4820 SST58D4821 1.8 3.6 2.0 1.8 3.0 9.2 330 8 0.86 65
SST58D4830 SST58D4831 1.8 2.4 3.0 0.8 1.3 1 9.2 330 8 0.86 65
SST58D5810 SST58D5811 1.8 8.8 1.0 8.8 19.0 11.7 430 8 1.1 77
SST58D5820 SST58D5821 1.8 4.8 2.0 2.4 5.1 11.7 430 8 1.1 77
SST58D5830 SST58D5831 1.8 3.0 3.0 1.0 2.62 11.7 430 8 1.1 77
Typical Performance Refer to page 39 for Driver –– Pull Out - - - Pull In
SST58D1820 DRIVER : UNIPOLAR SUPPLY : Vs = 24 V
CURRENT = 2.0 A/Phase EXCITING MODE = 2 Phase
INERTIAL LOAD : 100 g-cm2
SST58D1810 DRIVER : BIPOLAR SUPPLY : Vs = 24 VCURRENT = 1.4 A/Phase EXCITING MODE = 2 Phase
INERTIAL LOAD : 100 g-cm2
SST58D1820 DRIVER : BIPOLAR SUPPLY : Vs = 24 V
CURRENT = 2.8 A/Phase EXCITING MODE = 2 Phase
INERTIAL LOAD : 100 g-cm2
SST58D1830 DRIVER : UNIPOLAR SUPPLY : Vs = 24 V
CURRENT = 3.0 A/Phase EXCITING MODE = 2 Phase
INERTIAL LOAD : 100 g-cm2
RoHS compliant

27
6065 BRISTOL PARKWAY, CULVER CITY, CA 90230 • PHONE (310) 693-7600 • TOLL FREE (800) 755-0752 • WWW.SHINANO.COM • E-MAIL: [email protected]
Stepper Motor Series SST58D Size 23
8 Lead Wire42mm, 49mm,54mm, 65mm,77mmL1.8o step
SST58D3820 DRIVER : BIPOLAR SUPPLY : Vs = 24 V
CURRENT = 2.8 A/Phase EXCITING MODE = 2 Phase
INERTIAL LOAD : 100 g-cm2
SST58D2810 DRIVER : BIPOLAR SUPPLY : Vs = 24 V
CURRENT = 1.4 A/Phase EXCITING MODE = 2 Phase
INERTIAL LOAD : 100 g-cm2
SST58D2820 DRIVER : BIPOLAR SUPPLY : Vs = 24 V
CURRENT = 2.8 A/Phase EXCITING MODE = 2 Phase
INERTIAL LOAD : 100 g-cm2
SST58D2820 DRIVER : UNIPOLAR SUPPLY : Vs = 24 V
CURRENT = 2.0 A/Phase EXCITING MODE = 2 Phase
INERTIAL LOAD : 100 g-cm2
SST58D2830 DRIVER : UNIPOLAR SUPPLY : Vs = 24 V
CURRENT = 3.0 A/Phase EXCITING MODE = 2 Phase
INERTIAL LOAD : 100 g-cm2
SST58D3810 DRIVER : BIPOLAR SUPPLY : Vs = 24 V
CURRENT = 1.4 A/Phase EXCITING MODE = 2 Phase
INERTIAL LOAD : 100 g-cm2
SST58D3820 DRIVER : UNIPOLAR SUPPLY : Vs = 24 V
CURRENT = 2.0 A/Phase EXCITING MODE = 2 Phase
INERTIAL LOAD : 100 g-cm2
SST58D3830 DRIVER : UNIPOLAR SUPPLY : Vs = 24 V
CURRENT = 3.0 A/Phase EXCITING MODE = 2 Phase
INERTIAL LOAD : 100 g-cm2
SST58D4810 DRIVER : BIPOLAR SUPPLY : Vs = 24 V
CURRENT = 1.4 A/Phase EXCITING MODE = 2 Phase
INERTIAL LOAD : 100 g-cm2
SST58D4820 DRIVER : BIPOLAR SUPPLY : Vs = 24 V
CURRENT = 2.8 A/Phase EXCITING MODE = 2 Phase
INERTIAL LOAD : 100 g-cm2

28
6065 BRISTOL PARKWAY, CULVER CITY, CA 90230 • PHONE (310) 693-7600 • TOLL FREE (800) 755-0752 • WWW.SHINANO.COM • E-MAIL: [email protected]
Stepper Motor Series SST58D Size 23
8 Lead Wire42mm, 49mm,54mm, 65mm,77mmL1.8o step
Rating ConversionsSTANDARD DRIVE SCHEME RATING UNIPOLAR MULTIPLIER BIPOLAR SERIES MULTIPLIER BIPOLAR PARALLEL MULTIPLIER
Unipolar or Bipolar (center-tap to end) VOL TS (DC) 1 1.4 0.7
Unipolar or Bipolar (center-tap to end) CURRENT (A) 1 0.7 1.4
Unipolar or Bipolar (center-tap to end) RESIST ANCE (?) 1 2 0.5
Unipolar or Bipolar (center-tap to end) INDUCT ANCE (mH) 1 4 1
Unipolar or Bipolar (center-tap to end) HOLDING TORQUE 1 1.4 1.4
Step Motors are versatile and have many drive methods. To determine the motor rating when using a drive method that differsfrom the standard rating approach, multiply the standard rated value by the number indicated in the chart that corresponds tothe drive scheme desired.
DIRECTION OF ROTATIONPhase sequence to produce clockwiserotation viewed from mounting end.
Phase Sequence (parallel connected) Phase Sequence (series connected)
STEP A B A B
1 + + – –
2 – + + –
3 – – + +
4 + – – +
5 + + – –
SST58D4820 DRIVER : UNIPOLAR SUPPLY : Vs = 24 V
CURRENT = 2.0 A/Phase EXCITING MODE = 2 Phase
INERTIAL LOAD : 100 g-cm2
SST58D4830 DRIVER : UNIPOLAR SUPPLY : Vs = 24 V
CURRENT = 3.0 A/Phase EXCITING MODE = 2 Phase
INERTIAL LOAD : 100 g-cm2
SST58D5810 DRIVER : BIPOLAR SUPPLY : Vs = 24 V
CURRENT = 1.4 A/Phase EXCITING MODE = 2 Phase
INERTIAL LOAD : 100 g-cm2
SST58D5820 DRIVER : BIPOLAR SUPPLY : Vs = 24 V
CURRENT = 2.8 A/Phase EXCITING MODE = 2 Phase
INERTIAL LOAD : 100 g-cm2
SST58D5820 DRIVER : UNIPOLAR SUPPLY : Vs = 24 V
CURRENT = 2.0 A/Phase EXCITING MODE = 2 Phase
INERTIAL LOAD : 100 g-cm2
SST58D5830 DRIVER : UNIPOLAR SUPPLY : Vs = 24 V
CURRENT = 3.0 A/Phase EXCITING MODE = 2 Phase
INERTIAL LOAD : 100 g-cm2

29
6065 BRISTOL PARKWAY, CULVER CITY, CA 90230 • PHONE (310) 693-7600 • TOLL FREE (800) 755-0752 • WWW.SHINANO.COM • E-MAIL: [email protected]
100
200
300
400
500
TORQ
UE(m
N–m
)
00
1000 2000 3000 4000 5000FREQUENCY (pps)
SST59D1100
Pull-out (24V)Pull-in (24V)
100
200
300
400
500
TORQ
UE(m
N–m
)
00
1000 2000 3000 4000 5000FREQUENCY (pps)
SST59D1150
Pull-out (24V)Pull-in (24V)
100
200
300
400
500
TORQ
UE(m
N–m
)
00
1000 2000 3000 4000 5000 6000 7000 0 1000 2000 3000 4000 5000 6000 7000FREQUENCY (pps)
SST59D1200
Pull-out (24V)Pull-in (24V)
100
200
300
400
500
TORQ
UE(m
N–m
)
0
FREQUENCY (pps)
SST59D1250
Pull-out (24V)Pull-in (24V)
100
200
300
400
500
TORQ
UE(m
N–m
)
00
1000 2000 3000 4000 5000FREQUENCY (pps)
SST59D1100
Pull-out (24V)Pull-in (24V)
100
200
300
400
500
TORQ
UE(m
N–m
)
00
1000 2000 3000 4000 5000FREQUENCY (pps)
SST59D1150
Pull-out (24V)Pull-in (24V)
100
200
300
400
500
TORQ
UE(m
N–m
)
00
1000 2000 3000 4000 5000 6000 7000 0 1000 2000 3000 4000 5000 6000 7000FREQUENCY (pps)
SST59D1200
Pull-out (24V)Pull-in (24V)
100
200
300
400
500
TORQ
UE(m
N–m
)
0
FREQUENCY (pps)
SST59D1250
Pull-out (24V)Pull-in (24V)
100
200
300
400
500
TORQ
UE(m
N–m
)
00
1000 2000 3000 4000 5000FREQUENCY (pps)
SST59D1100
Pull-out (24V)Pull-in (24V)
100
200
300
400
500
TORQ
UE(m
N–m
)
00
1000 2000 3000 4000 5000FREQUENCY (pps)
SST59D1150
Pull-out (24V)Pull-in (24V)
100
200
300
400
500
TORQ
UE(m
N–m
)
00
1000 2000 3000 4000 5000 6000 7000 0 1000 2000 3000 4000 5000 6000 7000FREQUENCY (pps)
SST59D1200
Pull-out (24V)Pull-in (24V)
100
200
300
400
500
TORQ
UE(m
N–m
)
0
FREQUENCY (pps)
SST59D1250
Pull-out (24V)Pull-in (24V)
100
200
300
400
500
TORQ
UE (m
N–m
)
00
1000 2000 3000 4000 5000FREQUENCY (pps)
SST59D1100
Pull-out (24V)Pull-in (24V)
100
200
300
400
500
TORQ
UE (m
N–m
)
00
1000 2000 3000 4000 5000FREQUENCY (pps)
SST59D1150
Pull-out (24V)Pull-in (24V)
100
200
300
400
500
TORQ
UE (m
N–m
)
00
1000 2000 3000 4000 5000 6000 7000 0 1000 2000 3000 4000 5000 6000 7000FREQUENCY (pps)
SST59D1200
Pull-out (24V)Pull-in (24V)
100
200
300
400
500
TORQ
UE (m
N–m
)
0
FREQUENCY (pps)
SST59D1250
Pull-out (24V)Pull-in (24V)
Stepper Motor Series SST59D Size 23
Integral Connector 6 pin42mm, 54mm,77mmL 1.8o step
SpecificationsMODEL STEP VOLTAGE CURRENT RESISTANCE INDUCTANCE HOLDING ROTOR NUMBER MASS MOTOR SHAFT
ANGLE TORQUE INERTIA OF LEADS LENGTH DIAMETER
SINGLE SHAFT DOUBLE SHAFT DEG. V A/Phase Ω/Phase mH/Phase kg-cm g-cm2 LEAD kg MM MM
SST59D1100 SST59D1101 1.8 4.7 1.0 4.7 7.5 567 145 6 0.5 42 6.35
SST59D1150 SST59D1151 1.8 3.2 1.5 2.1 3.4 567 145 6 0.5 42 6.35
SST59D1200 SST59D1201 1.8 2.6 2.0 1.3 2.0 567 145 6 0.5 42 6.35
SST59D1250 SST59D1251 1.8 2.1 2.5 0.9 1.3 567 145 6 0.5 42 6.35
SST59D1300 SST59D1301 1.8 1.9 3.0 0.6 0.9 567 145 6 0.5 42 6.35
SST59D3100 SST59D3101 1.8 6.3 1.0 6.3 11.1 925 245 6 0.7 54.5 6.35
SST59D3150 SST59D3151 1.8 4.2 1.5 2.8 5.1 925 245 6 0.7 54.5 6.35
SST59D3200 SST59D3201 1.8 3.4 2.0 1.7 3.0 925 245 6 0.7 54.5 6.35
SST59D3250 SST59D3251 1.8 2.8 2.5 1.1 2.0 925 245 6 0.7 54.5 6.35
SST59D3300 SST59D3301 1.8 2.5 3.0 0.8 1.3 925 245 6 0.7 54.5 6.35
SST59D5100 SST59D5101 1.8 9.6 1.0 9.6 19.0 1570 470 6 1.1 77.5 8
SST59D5150 SST59D5151 1.8 6.3 1.5 4.2 8.4 1570 470 6 1.1 77.5 8
SST59D5200 SST59D5201 1.8 5.0 2.0 2.5 4.9 1570 470 6 1.1 77.5 8
SST59D5250 SST59D5251 1.8 4.2 2.5 1.7 3.3 1570 470 6 1.1 77.5 8
SST59D5300 SST59D5301 1.8 3.6 3.0 1.2 2.2 1570 470 6 1.1 77.5 8
Typical Performance Refer to page 39 for Driver
SST59D1200 VOLTAGE : 24VDC CURRENT : 1.5 A/phaseDRIVER : Constant current INTERIA?LOAD : 100g-cm^2
EXCITING?MODE : Unipolar, 2 phase
SST59D1100 VOLTAGE : 24VDC CURRENT : 1.0 A/phaseDRIVER : Constant current INTERIA?LOAD : 100g-cm^2
EXCITING?MODE : Unipolar, 2 phase
SST59D1150 VOLTAGE : 24VDC CURRENT : 1.0 A/phaseDRIVER : Constant current INTERIA?LOAD : 100g-cm^2
EXCITING?MODE : Unipolar, 2 phase
SST59D1250 VOLTAGE : 24VDC CURRENT : 2.0 A/phaseDRIVER : Constant current INTERIA?LOAD : 100g-cm^2
EXCITING?MODE : Unipolar, 2 phase
RoHS compliant

30
6065 BRISTOL PARKWAY, CULVER CITY, CA 90230 • PHONE (310) 693-7600 • TOLL FREE (800) 755-0752 • WWW.SHINANO.COM • E-MAIL: [email protected]
Stepper Motor Series SST59D Size 23
Integral Connector 6 pin42mm, 54mm,77mm,1.8o step
100
200
300
400
500
TORQ
UE(m
N–m
)
0
FREQUENCY (pps)
SST59D1300
200
400
600
800
1000
TORQ
UE(m
N–m
)
00
1000 2000 3000 4000 5000FREQUENCY (pps)
SST59D3100
Pull-out (24V)Pull-in (24V)
200
400
600
800
1000
TORQ
UE(m
N–m
)
00
1000 2000 3000 4000 5000
0 1000 2000 3000 4000 5000 6000 7000
0 1000 2000 3000 4000 5000 6000 7000FREQUENCY (pps)
SST59D3150
Pull-out (24V)Pull-in (24V)
200
400
600
800
1000
TORQ
UE(m
N–m
)0
FREQUENCY (pps)
SST59D3200
Pull-out (24V)Pull-in (24V)
Pull-out (24V)Pull-in (24V)
200
400
600
800
1000
TORQ
UE(m
N–m
)
0
FREQUENCY (pps)
SST59D3250
200
400
600
800
1000
TORQ
UE(m
N–m
)
0
FREQUENCY (pps)
SST59D3300
0 1000 2000 3000 4000 5000 6000 7000
Pull-out (24V)Pull-in (24V)
0 1000 2000 3000 4000 5000 6000 7000
Pull-out (24V)Pull-in (24V)
200
400
600
800
1000
TORQ
UE(m
N–m
)
0
FREQUENCY (pps)
SST59D3250
200
400
600
800
1000
TORQ
UE(m
N–m
)
0
FREQUENCY (pps)
SST59D3300
0 1000 2000 3000 4000 5000 6000 7000
Pull-out (24V)Pull-in (24V)
0 1000 2000 3000 4000 5000 6000 7000
Pull-out (24V)Pull-in (24V)
100
200
300
400
500
TORQ
UE(m
N–m
)
0
FREQUENCY (pps)
SST59D1300
200
400
600
800
1000
TORQ
UE(m
N–m
)
00
1000 2000 3000 4000 5000FREQUENCY (pps)
SST59D3100
Pull-out (24V)Pull-in (24V)
200
400
600
800
1000
TORQ
UE(m
N–m
)
00
1000 2000 3000 4000 5000
0 1000 2000 3000 4000 5000 6000 7000
0 1000 2000 3000 4000 5000 6000 7000FREQUENCY (pps)
SST59D3150
Pull-out (24V)Pull-in (24V)
200
400
600
800
1000
TORQ
UE(m
N–m
)0
FREQUENCY (pps)
SST59D3200
Pull-out (24V)Pull-in (24V)
Pull-out (24V)Pull-in (24V)
100
200
300
400
500
TORQ
UE(m
N–m
)
0
FREQUENCY (pps)
SST59D1300
200
400
600
800
1000
TORQ
UE(m
N–m
)
00
1000 2000 3000 4000 5000FREQUENCY (pps)
SST59D3100
Pull-out (24V)Pull-in (24V)
200
400
600
800
1000
TORQ
UE(m
N–m
)
00
1000 2000 3000 4000 5000
0 1000 2000 3000 4000 5000 6000 7000
0 1000 2000 3000 4000 5000 6000 7000FREQUENCY (pps)
SST59D3150
Pull-out (24V)Pull-in (24V)
200
400
600
800
1000
TORQ
UE(m
N–m
)
0
FREQUENCY (pps)
SST59D3200
Pull-out (24V)Pull-in (24V)
Pull-out (24V)Pull-in (24V)
100
200
300
400
500
TORQ
UE(m
N–m
)
0
FREQUENCY (pps)
SST59D1300
200
400
600
800
1000
TORQ
UE(m
N–m
)
00
1000 2000 3000 4000 5000FREQUENCY (pps)
SST59D3100
Pull-out (24V)Pull-in (24V)
200
400
600
800
1000
TORQ
UE(m
N–m
)
00
1000 2000 3000 4000 5000
0 1000 2000 3000 4000 5000 6000 7000
0 1000 2000 3000 4000 5000 6000 7000FREQUENCY (pps)
SST59D3150
Pull-out (24V)Pull-in (24V)
200
400
600
800
1000
TORQ
UE(m
N–m
)
0
FREQUENCY (pps)
SST59D3200
Pull-out (24V)Pull-in (24V)
Pull-out (24V)Pull-in (24V)
Depending on dirver condition, motor may generate excessive temperature.Recommended temperature on motor surface is 100 deg C max.
SST59D1300 VOLTAGE : 24VDC CURRENT : 3.0 A/phaseDRIVER : Constant current INTERIA?LOAD : 100g-cm^2
EXCITING?MODE : Unipolar, 2 phase
SST59D3100 VOLTAGE : 24VDC CURRENT : 1.0 A/phaseDRIVER : Constant current INTERIA?LOAD : 100g-cm^2
EXCITING?MODE : Unipolar, 2 phase
SST59D3150 VOLTAGE : 24VDC CURRENT : 1.5 A/phaseDRIVER : Constant current INTERIA?LOAD : 100g-cm^2
EXCITING?MODE : Unipolar, 2 phase
SST59D3200 VOLTAGE : 24VDC CURRENT : 2.0 A/phaseDRIVER : Constant current INTERIA?LOAD : 100g-cm^2
EXCITING?MODE : Unipolar, 2 phase
SST59D3250 VOLTAGE : 24VDC CURRENT : 2.5 A/phaseDRIVER : Constant current INTERIA?LOAD : 100g-cm^2
EXCITING?MODE : Unipolar, 2 phase
SST59D3300 VOLTAGE : 24VDC CURRENT : 3.0 A/phaseDRIVER : Constant current INTERIA?LOAD : 100g-cm^2
EXCITING?MODE : Unipolar, 2 phase
1
2
3
4 5 6
Wiring Diagram PIN?OUT CHART
1 2 3 4 5 6
A A A B B BCOM COM

31
6065 BRISTOL PARKWAY, CULVER CITY, CA 90230 • PHONE (310) 693-7600 • TOLL FREE (800) 755-0752 • WWW.SHINANO.COM • E-MAIL: [email protected]
Stepper Motor Series SST 83D Size 34
6 Lead Wire62mm, 93.5mm,128.5mm1.8o step
SpecificationsMODEL STEP VOLTAGE CURRENT RESISTANCE INDUCTANCE HOLDING ROTOR NUMBER WEIGHT DIMENSION
ANGLE TORQUE INERTIA OF LEADS
SINGLE SHAFT DOUBLE SHAFT DEG. V A/Phase Ω/Phase mH/Phase kg-cm g-cm2 LEAD kg L
SST83D1C010 SST83D1C011 1.8 1.8 4.5 0.4 0.96 16 570 6 1.4 62
SST83D1C020 SST83D1C021 1.8 2.8 2.8 1 2.6 16 570 6 1.4 62
SST83D1C030 SST83D1C031 1.8 5.5 1.25 4.4 15 17 570 6 1.4 62
SST83D2C010 SST83D2C011 1.8 3 4 0.75 2.4 31 1100 6 2.5 93.5
SST83D2C020 SST83D2C021 1.8 6 2 3 13 36 1100 6 2.5 93.5
SST83D2C030 SST83D2C031 1.8 4.2 3.5 1.2 4.7 42 1800 6 3.5 128.5
Typical Performance Refer to page 39?? for Driver –– Pull Out - - - Pull In
SST83D1C010 DRIVER : SDU2401 CURRENT = 4.0 A/Phase
EXCITING MODE = 2 Phase INERTIAL LOAD : 680 g-cm2
SST83D1C020 DRIVER : SDU2401 CURRENT = 2.8 A/Phase
EXCITING MODE = 2 Phase INERTIAL LOAD : 680 g-cm2
SST83D1C030 DRIVER : SDU2401 CURRENT = 1.25 A/Phase
EXCITING MODE = 2 Phase INERTIAL LOAD : 680 g-cm2
SST83D2C010 DRIVER : SDU2401 CURRENT = 4.0 A/Phase
EXCITING MODE = 2 Phase INERTIAL LOAD : 680 g-cm2
SST83D2C020 DRIVER : SDU2401 CURRENT = 2.0 A/Phase
EXCITING MODE = 2 Phase INERTIAL LOAD : 680 g-cm2
SST83D3C010 DRIVER : SDU2401 CURRENT = 3.5 A/Phase
EXCITING MODE = 2 Phase INERTIAL LOAD : 680 g-cm2
RoHS compliant

32
6065 BRISTOL PARKWAY, CULVER CITY, CA 90230 • PHONE (310) 693-7600 • TOLL FREE (800) 755-0752 • WWW.SHINANO.COM • E-MAIL: [email protected]
SKC Stepping Motor Part Number
1. Stepping motor model number description - SKC’s stepping motor model number is determined by the following:
Lead Wire Configuration and Color Guide
Typical Drive Circuits
Features of Stepping Motors
???2.Digital control of speed and position.3. Open loop system with no position feedback required.4. Excellent response to acceleration, deceleration and stecommands.
Stepper Motor Operation and Theory
5. Noncumulative positioning error (± 5% of step angle).6. Excellent low speed/high torque characteristics without gear reduction.7. Inherent detent torque.8. Holding torque when energized.9. Bidirectional operation.10. Can be stalled without motor damage.11. No brushes for longer trouble free life.12. Precision ball bearings.
Typical Stepping Motor ApplicationsFor accurate positioning of X-Y tables, plotters, printers, facsimilemachines, medical applications, robotics, barcode scanners, imagescanners, copiers, etc.
ConstructionThere are three basic types of step motors: variable reluctance (VR), permanent magnet (PM) and hybrid. SKC adopted the hybrid typestep motor design because it has some of the desirable features ofboth the VR and PM. It has high resolution, excellent holding anddynamic torque and can operate at high stepping rate.
In Fig. 5-1 construction of SKC stepping motor is shown.In Fig. 5-2 the detail of rotor construction is shown.
Fig. 5-1 Stepping Motor Construction
Fig. 5-2 Rotor Construction????
S S T
Hybrid TypeStepping Motor
Motor Size(O.D. in mm)
Motor LengthO to 5
Construction –C: Steel HousingO: No Steel Housing
Shaft ConfigurationO: Single1: Double
Motor Characteristics (1-99)
Step Angle
C: 0.9ºD: 1.8ºG: 3.6ºH: 3.75º
Rotor Laminations
Rotor Laminations
Half Pitch Off Set
Magnet
Magnet
Polarity
BROWN (A)
ORANGE (A)
RED
(B)
YELL
OW
(B)
BROWN (A)
BLACK (COM A)
ORANGE (A)
RED
(B)
WH
ITE
(CO
MB)
YELL
OW
(B)
BROWN (A)
BLACK (COM)
ORANGE (A)
RED
(B)
YELL
OW
(B)
Front End Bell
Ball Bearing
Winding
Ball Bearing
Magnet
Rotor Laminations
Rear End Bell
Stator

33
6065 BRISTOL PARKWAY, CULVER CITY, CA 90230 • PHONE (310) 693-7600 • TOLL FREE (800) 755-0752 • WWW.SHINANO.COM • E-MAIL: [email protected]
Stepper Motor Operation and Theory
Stepping Motor Theory
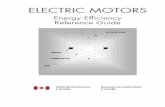
Using a 1.8 degree, unipolar, 4-phase stepping motor as an example,the following will explain the theory of operation. Referring to Fig. 6-1, the number of poles on the stator is 8 spaced at 45 degreeintervals. Each pole face has 5 teeth spaced at 7.2 degree intervals.Each stator pole has a winding as shown in Fig. 6-1.
Fig. 6-1 Stator
When applying the current to the windings in the followingsequence per Table 6-1, the stator can generate the rotating magneticfield as shown in Fig. 6-2 (steps 1 thru 4).
Table 6-1 Step Phase Sequence (1 Phase Excited)
Step 1 Step 2
Fig. 6-2 Rotational Magnetic Field Generated by Phase Sequence
The hybrid rotor has 2 sets (stacks) of laminations separated by a permanent magnet. Each set of lams has 50 teeth and are offset fromeach other by 1⁄2 tooth pitch. This gives the rotor 50 N and 50 S poles at the rotor O.D.
Fig. 6-3 illustrates the movement of the rotor when the phase sequence is energized.
In step 1, phase A is excited so that the S pole of the rotor is attracted topole 1,5 of the stator which is now a N pole, and the N pole of the rotor is attracted to pole 3,7 of the stator which is a S pole now. At this pointthere is an angle difference between the rotor and stator teeth of 1/4pitch (1.8 degrees). For instance, the stator teeth of poles 2,6 and 4,8are offset 1.8 degrees from the rotor teeth.
In step 2, there is a stable position when a S pole of the rotor is lined upwith pole 2,6 of the stator and a N pole of the rotor lines up with pole4,8 of stator. The rotor has moved 1.8 degrees of rotation from step 1.
The switching of phases per steps 3, 4 etc. produces 1.8 degrees of rotation per step.
Fig. 6-3 1 Phase Excitation Sequence?
Drive Pulse
Phase A Step 1 ON OFF
Step 2
Step 3
Step 4
Phase A
Phase B
Phase B
3
4
28
7
6
S
N N
S
1
5
3
4
28
7
6
S N
SN
1
5
3
4
28
7
6
N
S S
N
1
5
3
4
28
7
6
N S
NS
1
5
Winding
Stator Pole
Pole 1,5
Step 1Stator
Rotor
Step 2Stator
Rotor
Step 3Stator
Rotor
Pole 2,6 Pole 3,7 Pole 4,8

34
6065 BRISTOL PARKWAY, CULVER CITY, CA 90230 • PHONE (310) 693-7600 • TOLL FREE (800) 755-0752 • WWW.SHINANO.COM • E-MAIL: [email protected]
Stepper Motor Operation and Theory
Technical Data and Terminology
7-1 Holding TorqueThe maximum steady torque that can be applied to the shaft of an energized motor without causing rotation.
7-2 Detent TorqueThe maximum torque that can be applied to the shaft of a non-energized motor without causing rotation.
7-3 Speed-Torque CurveThe speed-torque characteristics of a stepping motor are a function of the drive circuit, excitation method and load inertia.
Fig. 7-1 Speed - Torque Curve
7-4 Maximum Slew FrequencyThe maximum rate at which the step motor will run and remain in synchronism.
7-5 Maximum Starting FrequencyThe maximum pulse rate (frequency) at which an unloaded step motor can start and run without missing steps or stop without missing steps.
7-6 Pull-out TorqueThe maximum torque that can be applied to the shaft of a step motor (running at constant speed) and not cause it to lose step.
7-7 Pull-in TorqueThe maximum torque at which a step motor can start, stop andreverse the direction of rotation without losing step. The maxi-mum torque at which an energized step motor will start and runin synchronism, without losing steps, at constant speed.
7- 8 Slewing RangeThis is the area between the pull-in and pull-out torque curves where a step motor can run without losing step, when the speed is increased or decreased gradually. Motor must be brought up to the slew range with acceleration and deceleration technique known as ramping.
7-9 Start-Stop RangeThis is the range where a stepping motor can start, stop andreverse the direction of rotation without losing step.
7-10 AccuracyThis is defined as the difference between the theoretical and actual rotor position expressed as a percentage of the step angle.Standard is ±5%. An accuracy of ±3% is available on special request. This positioning error is noncumulative.
7-11 Hysteresis ErrorThis is the maximum accumulated error from theoretical positionfor both forward and backward direction of rotation. See Fig 7-2.
Fig. 7-2 Step Angle Accuracy
7-12 ResonanceA step motor operates on a series of input pulses, each pulse caus-ing the rotor to advance one step. In this time the motor’s rotormust accelerate and then decelerate to a stop. This causes oscilla-tion, overshoot and vibration. There are some speeds at which themotor will not run. This is called its resonant frequency. Theobjective is to design the system so that no resonant frequenciesappear in the operating speed range. This problem can be eliminat-ed by means of using mechanical dampers, external electronics, drivemethods and step angle changes.
Drive Methods
8-1 Drive CircuitsThe operation of a step motor is dependent upon an indexer(pulse source) and driver. The indexer feeds pulses to the driverwhich applies power to the appropriate motor windings. Thenumber and rate of pulses determines the speed, direction of rota-tion and the amount of rotation of the motor output shaft. Theselection of the proper driver is critical to the optimum perform-ance of a step motor. Fig. 8-1 shows some typical drive circuits.
These circuits also illustrate some of the methods used to protectthe power switches against reverse voltage transients.
Holding TorqueDynamic Torque (Resonance point is not included herein.)
Driving Frequency (Speed)
Max. No LoadResponse (PPS)
Max. Response(PPS)
Backward
Start-Stop Range
Pull-out Torque
Torq
ue(k
gf-c
m)
Angl
eEr
ror
Pull-in Torque
Forward
Theoretical Angle
Neg. Max. Error
Positive Max.ErrorSlew Range
Hysteresis

35
6065 BRISTOL PARKWAY, CULVER CITY, CA 90230 • PHONE (310) 693-7600 • TOLL FREE (800) 755-0752 • WWW.SHINANO.COM • E-MAIL: [email protected]
Stepper Motor Operation and Theory
8-1.1 Damping MethodsThese circuits can also be used to improve the damping andnoise characteristics of a step motor. However, the torque athigher pulse rates (frequency) can be reduced so careful consid-eration must be exercised when selecting one of these methods.
Examples:1. Diode Method Fig. 8-1 (a)2. Diode + Resistance Method Fig. 8-1 (b)3. Diode + Zener Diode Method Fig. 8-1 (c )4. Capacitor Method Fig. 8-1 (d)
Fig. 8-1
Fig. 8-1
Fig. 8-1
8-1.2 Stepping RateA step motor operated at a fixed voltage has a decreasing torquecurve as the frequency or step rate increases. This is due to the risetime of the motor winding which limits the value of the coil cur-rent. This is determined by the ratio of inductance to resistance(L/R) of the motor and driver as illustrated in Fig 8-2 (a).
Compensation for the L/R of a circuit can be accomplished as follows:
a) Increase the supply voltage and add a series resistor, Fig 8-2(b), to maintain rated motor current and reduce the L/R ofthe circuit.
b) Increase the supply voltage, Fig 8-2 (c), improving the timeconstant (L/R) of the circuit. However, it is necessary to limitthe motor current with a bi-level or chopped supply voltage.
Examples:1. Constant Voltage Drive Fig. 8-1 (e)2. Dual Voltage (Bi-level) Drive Fig. 8-1 ( f )3. Chopper Drive Fig. 8-1 (g)
Fig. 8-2
(c) : τ = L/RSSuuppppllyy VVoollttaaggee = 2
V0
(b) : τ = L/2RSSuuppppllyy VVoollttaaggee = 2
V0
(a) : τ = L/RSSuuppppllyy VVoollttaaggee =V0(a)
(b)
(c)2 I0
I0
CCuurrrr
eenntt

36
6065 BRISTOL PARKWAY, CULVER CITY, CA 90230 • PHONE (310) 693-7600 • TOLL FREE (800) 755-0752 • WWW.SHINANO.COM • E-MAIL: [email protected]
Stepper Motor Operation and Theory
8-2 Excitation MethodsIn Table 8-1 are descriptions and features of each method.
Table 8-1
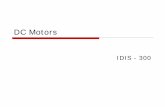
8-3 Bipolar and Unipolar OperationAll SKC stepper motors are available with either two coil bipolar or four coil unipolar windings.
Bipolar Winding - the stator flux is reversed by reversing the current in the winding. It requires a push-pull bipolar drive asshown in Fig. 8-3. Care must be taken to design the circuit sothat the transistors in series do not short the power supply bycoming on at the same time. Properly operated, the bipolar wind-ing gives the optimum performance at low to medium step rates.
Fig. 8-3 Bipolar Method Fig. 8-4 Unipolar Method
Unipolar Winding - has two coils wound on the same bobbin per stator half. Flux is reversed by energizing one coil or the other coil from a single power supply. The use of a unipolar winding, sometimes called a bifilar winding, allows the drive circuit to be simplified. Not only are one-half as many power switches required (4 vs. 8), but the timing is not as critical to prevent a current short through two transistors as is possible with a bipolar drive. Unipolar motors have approxi mately 30% less torque at low step rates. However, at higher rates the torque outputs are equivalent.
Step Motor Load Calculations and SelectionTo select the proper step motor, the following must be determined:1. Load Conditions
1-a. Friction Load1-b. Load Inertia
2. Dynamic Load Conditions2-a. Drive Circuit2-b. Maximum Speed (PPS/Frequency)2-c. Acceleration/Deceleration Pattern
With the above load information the proper step motorcan be selected.
9-1 Load InertiaThe following is an example for calculating the inertia of a hollow cylinder.
Fig. 9-1
J =1
⁄8 . M . (D12 + D22) (kg-cm2)
Where M: mass of pulley (kg)D1: outside diameter (cm)D2: inside diameter (cm)
9-2 Linear systems can be related to rotational systems by utilizing thekinetic energy equations for the two systems. For linear transla-tions:
Energy =1
⁄2 M v2 =1
⁄2 J w2
Where M: massv: velocityJ: inertiaw: angular velocity
1) Gear drive systemWhen gears are used to drive a load, the inertia reflected to the motor is expressed by the following equation:
J = (Z1/Z2)2 . (J2 + J3) + J1
Where Z1, Z2: No. of gear teethJ1, J2, J3: inertia (kg-cm2)J: reflected inertia, (kg-cm2)
Excitation MethodSingle Phase
Switchingsequence
Features
Pulse
phase A
phase B
phase A
phase B
Hold & runningtorque reducedby 39%
Increased efficiency.
Poor step accuracy.
High torque
Good stepaccuracy.
Poor step accuracy.
Good resonancecharacteristics.
Higher pulse rates.
Half stepping
Dual Phase 1-2 Phase
D1 D2

37
6065 BRISTOL PARKWAY, CULVER CITY, CA 90230 • PHONE (310) 693-7600 • TOLL FREE (800) 755-0752 • WWW.SHINANO.COM • E-MAIL: [email protected]
Stepper Motor Operation and Theory
Fig. 9-2
2) Pulley & belt system. A motor and belt drive arrangement isused for linear load translation
J = 2 J1 +1
⁄4 M D2
Where J: Total inertia reflected to motorJ1: inertia of pulley (kg-cm2)D: diameter of pulley (cm2)M: weight of load (kg)
Fig. 9-3
9-3 Determination of load acceleration/deceleration pattern.
9-3-1 Load CalculationTo determine the torque required to drive the load thefollowing equation should be satisfied.
Tm = Tf + TjWhere: Tm: Pullout torque (kgf-cm)
Tf: Friction torque (kgf-cm)Tj: Inertia load (kgf-cm)
TJ = (JR + JL)/g . (p . q . s)/180 . df/dt
JR: Rotor inertia [kg-cm2]JL: Load inertia [kg-cm2]q: Step angle [deg]g: Gravity acceleration = 980 [cm/sec2]f: Drive frequency [PPS]
Example: A 1.8 degree step motor is to be accelerated from 100 to1,000 pulses per second (PPS) in 50 ms, JR = 100 g-cm2, J1 = 1 kg-cm2.The necessary pullout torque is:
TJ = (0.1 + 1)/980 . (p . 1.8)/180 . (1000 - 100)/0.05 = 0.635 (kgf-cm)
9-3-2 Linear accelerationFor linear acceleration as shown in Fig. 9-4 frequency f(t),inertial system frequency fj(t) and inertia load Tj areexpressed as follows:
f(t) = (f1 - f0)/t1 . t + f0TJ = (JR + JL)/g . (p . q . s)/180 . (f1 - f0)/t1
Fig. 9-4 Linear Acceleration
9-3-3 Exponential accelerationFor exponential as shown in Fig. 9-5, drive frequency f(t) ???and inertia load Tj are expressed as follows:
f(t) = f1 . (1 - e^-(t/t)) + f0TJ = (JR + JL)/g . (p . q . s)/180 . f1/t . e^-(t/t)
Fig. 9-5 Exponential Acceleration
t1 Time
f0
f1
Time
Exponential off0
f1

38
6065 BRISTOL PARKWAY, CULVER CITY, CA 90230 • PHONE (310) 693-7600 • TOLL FREE (800) 755-0752 • WWW.SHINANO.COM • E-MAIL: [email protected]
Stepper Motor Driver Information
Excitation Table - Bipolar Excitation Table - Uniipolar
CW* CCW* PHASE A PHASE B PHASE -A PHASE -B CW* CCW* PHASE A PHASE B PHASE -A PHASE -B COMMON
1 5 + + - - 1 5 - - +
2 4 - + + - 2 4 - - +
3 3 - - + + 3 3 - - +
4 2 + - - + 4 2 - - +
5 1 + + - - 5 1 - - +
*Viewed from shaft side ???*Viewed from shaft side
TYPE DBipolar, Constant I
Step Motor Drive CircuitTTYPE B
Unipolar, Constant ITYPE A
Unipolar, Constant VTYPE C
Bipolar, Constant V
MODEL TYPE MAX. CURRENT/PHASESDU 2201 Unipolar, Constant Current 1.5 Amps
SDU 2401 Unipolar, Constant Current 4.0 Amps
SDU 2101 Bipolar, Constant Current 2.0 Amps
Note: All drivers are 4 phase and are capable of half step (1-2 phase) and full step (2 phase) modes.Input for all models is 110 VAC, 60 Hz
SDU2401 SDU2201 SDU2101
Step Motor Drivers
A = BROWN, A = ORANGE, B = RED, B = YELLOWBLACK = A COMMON in unipolar 6-lead configuration, and A/B COMMON for unipolar 5-lead wire configurationWHITE = B COMMON
Bipolar Unipolar
Step Motor Wiring Diagram
Excitation Tables

39
6065 BRISTOL PARKWAY, CULVER CITY, CA 90230 • PHONE (310) 693-7600 • TOLL FREE (800) 755-0752 • WWW.SHINANO.COM • E-MAIL: [email protected]
A Company That Keeps Its Promises
Today any industrial manufacturer knows that growth,even survival, depends upon bringing more to the customer. Pricing, service, quality, and solid engineering are all expected.
SKC blends our engineering strength, our international presence, and our technical support together to create anevolving environment for the newest and most robust manu-facturing techniques and project design fulfillment. The SKCbrand of Kanban, lean manufacturing, and just in time (JIT) delivery, are based on the whole concept of Kaizen -constant improvement. Dedication to constant improve-ment has earned SKC several manufacturing and quality certifications including ISO 9001, ISO 14001 and the stringent automotive TS 16949 certification. The applica-tion of all these principles allows SKC to increase the level of service and value to all of our customers.
Quality, effort, involvement of all employees, willingness tochange, and communication are the key Kaizen concepts SKC applies to the flow of services the company provides.
All of which allows SKC to deliver on our promise time and time again

Corporate Headquarters
6065 Bristol Parkway,
Culver City, CA 90230
Tel: 310-693-7600 Fax: 310-693-7599
Toll Free: 800-755-0752
Website: www.shinano.com
Contact: [email protected]
Eastern Region Office
5000 Tilghman Stree, Suite 330,
Allentown, PA 18104
Tel: 601-481-9888
Fax: 601-481-9777
District Office
1502 Euclid Circle,
Lafayette, CO 80026
Tel: 303-926-0019
Fax: 303-200-8464