From Greek Mythology to Modern Manufacturing: The Procrustes Problem By Dr. Dan Curtis Department of...
37
From Greek Mythology to Modern Manufacturing: The Procrustes Problem By Dr. Dan Curtis Department of Mathematics Central Washington University
-
date post
19-Dec-2015 -
Category
Documents
-
view
215 -
download
0
Transcript of From Greek Mythology to Modern Manufacturing: The Procrustes Problem By Dr. Dan Curtis Department of...
From Greek Mythology to Modern Manufacturing: The Procrustes
Problem
ByDr. Dan Curtis
Department of MathematicsCentral Washington University


Procrustes offers Theseus a bed for the night

Theseus gives Procrustes a dose of his own medicine.

q
x1
y1
x2
y2
p
X Y

The Alignment Problem
• We know the X-coordinates of the features and of p.
• We know the Y-coordinates of the features , but not the
Y-coordinates of q.
• When the part is assembled, these points will coincide in space, so the and give the coordinates of the same point in two different coordinate systems.
• What will be the Y-coordinates of q?
ix
iy
ix
iy

1x2x
3x
p
1y
3y
2y
X
Y

Map Registration Problem
• Coordinates of features known in X-coordinate system. Also, X-coordinates of feature p are known.
• Y-coordinates of same features, are known.
• What would the Y-coordinates of feature p be?
ix
iy

Common Thread:
1. Have two cartesian coordinate systems in space, X and Y.
2. Have points whose coordinates are known in both coordinate systems.

Common Thread:
1. Have two cartesian coordinate systems in space, X and Y.
2. Have points whose coordinates are known in both coordinate systems.
Find the transformation which maps the X-coordinates of a point to the Y-coordinates of the same point.
x y Qx + t
rotation matrix translation vector

The Orthogonal Procrustes Problem
Given: points and in space, i = 1, …, n
Find: optimal rotation Q and translation vector t
x = Qx + t
does the best possible job of mapping the points
to for i = 1,...,ni i
x y
“Best possible” means choose Q and t to minimize the following expression:
ix iy
1
2
i ii
n
Qx + t - y

1
2
i ii
n
Qx + t - y
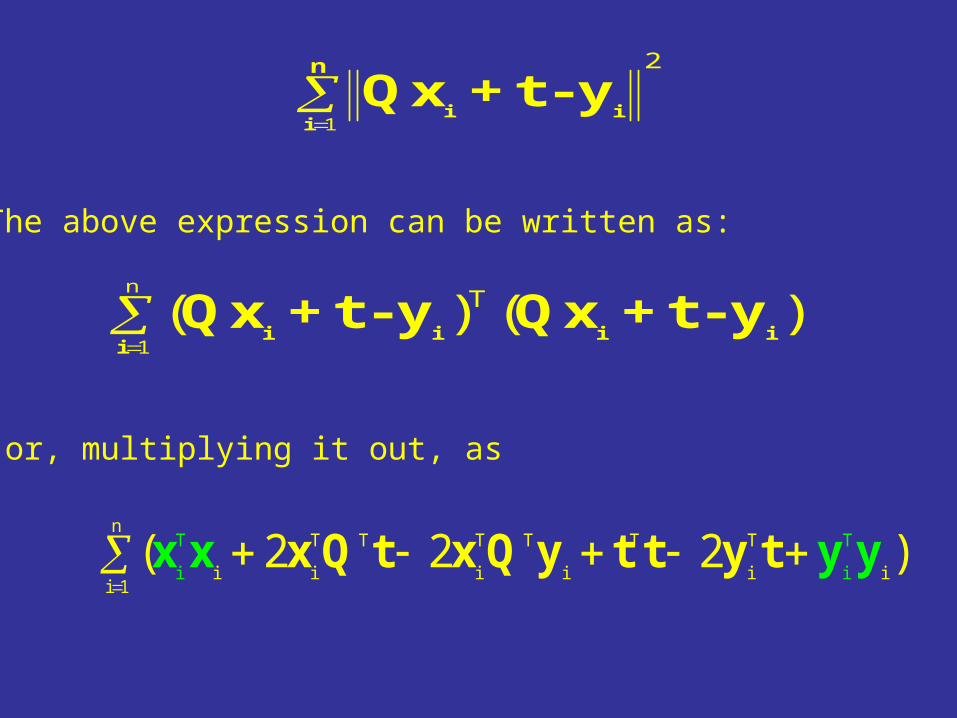
The above expression can be written as:
n
1
T( ) ( ) i i i ii
Qx + t - y Qx + t - y
1
2
i ii
n
Qx + t - y
The above expression can be written as:
n
1
T( ) ( ) i i i ii
Qx + t - y Qx + t - y
or, multiplying it out, as
nT T T T T T
i i i i
T T
i i i ii 1
( 2 2 2 )
x x Q t x Q y t yt tx yy

We must minimize
nT T
i
T T T
1i i
T
ii
( 22 2 )
x Q t tyx Q t y t

We must minimize
nT T
i
T T T
1i i
T
ii
( 22 2 )
x Q t tyx Q t y t
So t must be chosen to minimize
nT T T T
i ii 1
(2 2 )
x Q t t t y t
,

We must minimize
nT T
i
T T T
1i i
T
ii
( 22 2 )
x Q t tyx Q t y t
So t must be chosen to minimize
nT T T T
i ii 1
(2 2 )
x Q t t t y t
or, equivalently,
nT T T T
i ii 1
(2 2 )
x Q t y t
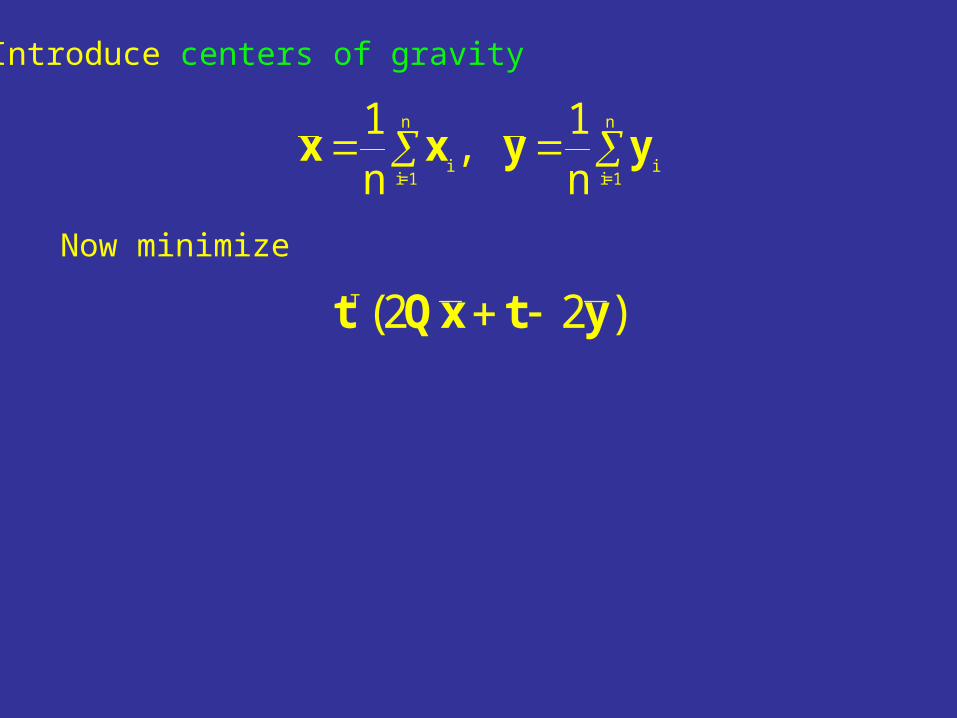
Introduce centers of gravity
n n
i ii=1 i=1
1 1,
n n x x y y
Now minimize
T (2 2 ) t Qx t y
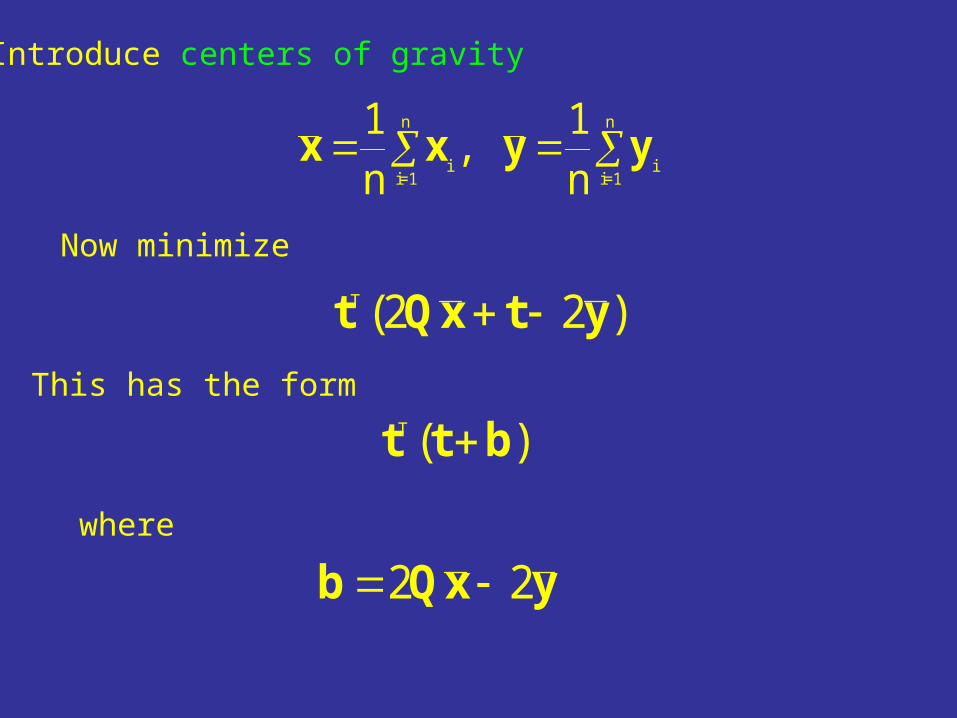
Introduce centers of gravity
n n
i ii=1 i=1
1 1,
n n x x y y
Now minimize
T (2 2 ) t Qx t y
This has the formT ( )t t b
where
2 2 b Qx y
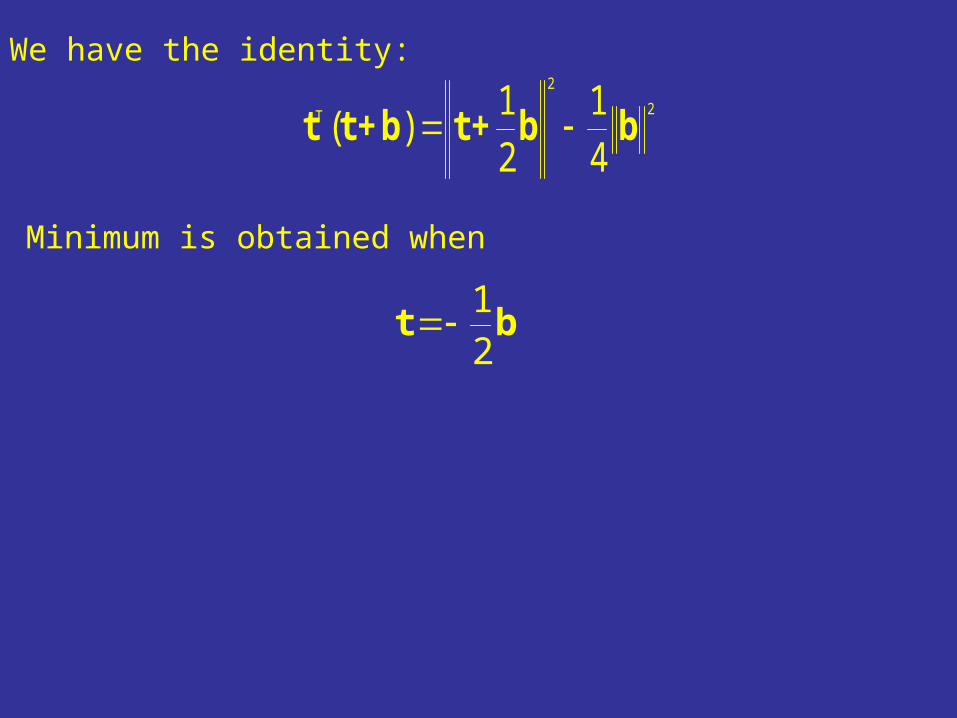
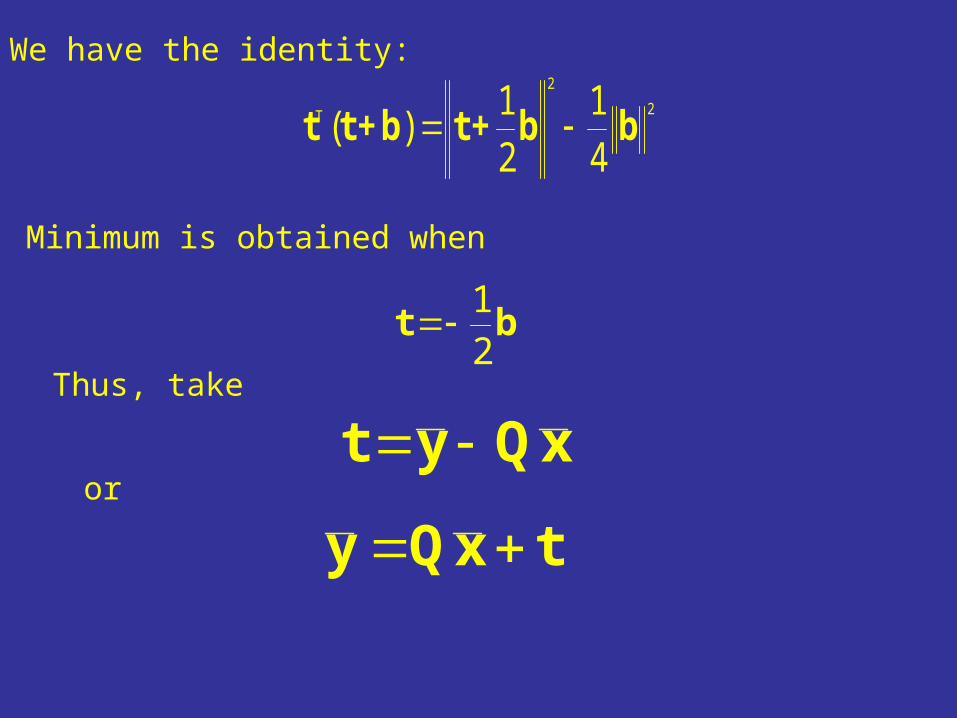
We have the identity:2
2T 1 1( )
2 4 t t + b t + b b
Minimum is obtained when
1
2t b
We have the identity:2
2T 1 1( )
2 4 t t + b t + b b
Minimum is obtained when
1
2t b
Thus, take
t y Qxor
y Qx t

Original expression to be minimized was:
1
2
i ii
n
Qx + t - y

Original expression to be minimized was:
1
2
i ii
n
Qx + t - y
This now becomes:
i i1
2
i
n
Qx y
where
i i i i, . x x x y y y
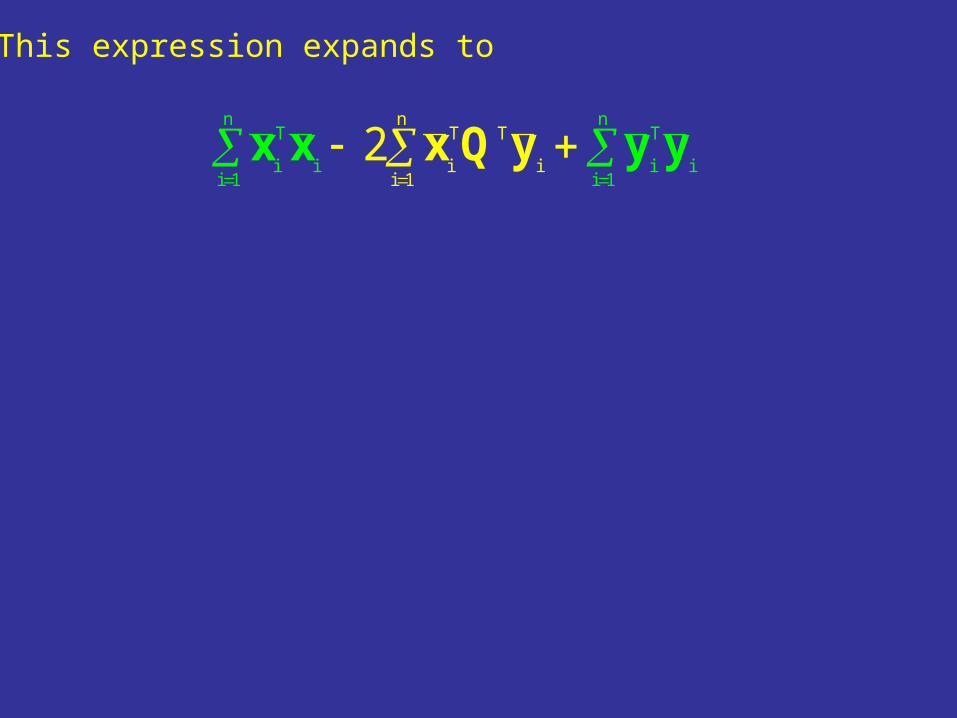
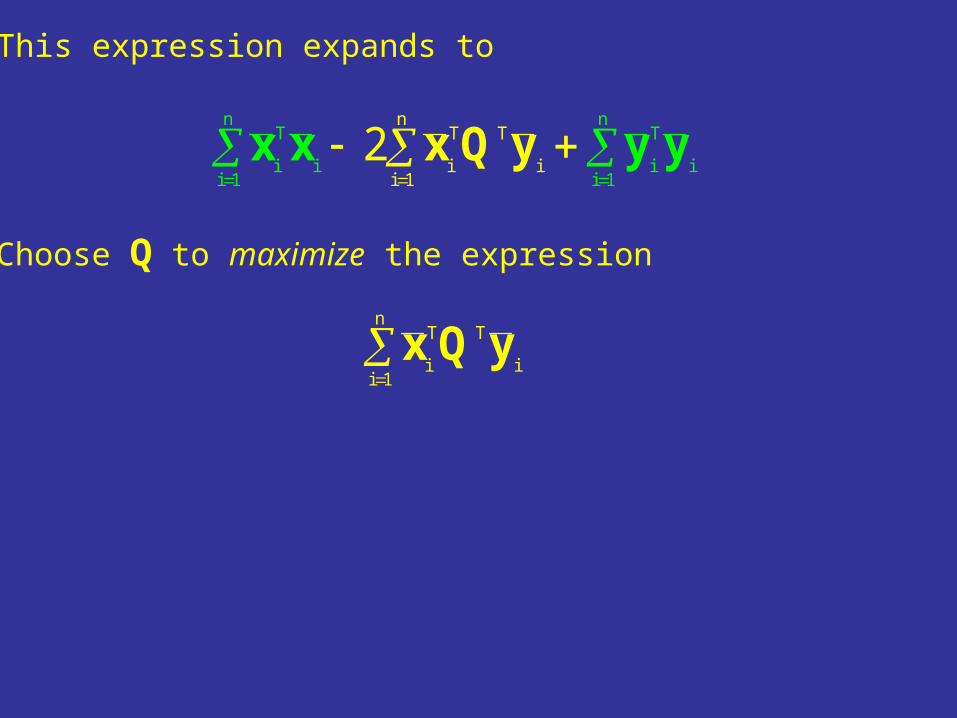
This expression expands to
nT
n nT T
i i i ii 1 i
T
i ii 1 1
2
x Q yx x y y
This expression expands to
nT
n nT T
i i i ii 1 i
T
i ii 1 1
2
x Q yx x y y
Choose Q to maximize the expression
nT T
i ii 1 x Q y

This expression expands to
nT
n nT T
i i i ii 1 i
T
i ii 1 1
2
x Q yx x y y
Choose Q to maximize the expression
nT T
i ii 1 x Q y
Define the matrix A by
nT
i ii 1
A x y

For any two column vectors u and v, we have
T Ttr( )u v uv

For any two column vectors u and v, we have
T Ttr( )u v uv
n nT T T
i i i ii 1
nT T
i1
ii 1 i
= ( tr) )) (tr(
x Q y x y Qx Q y AQ
So,

For any two column vectors u and v, we have
T Ttr( )u v uv
New problem: Given a matrix A, find a
rotation matrix Q which maximizes tr(AQ).
n nT T T
i i i ii 1
nT T
i1
ii 1 i
= ( tr) )) (tr(
x Q y x y Qx Q y AQ
So,

The Singular Value Decomposition
1
2
n
0 0 0
0 0 0
0
TA U V
1 2 n 0
U and V are orthogonal matrices
(singular values)
Theorem 1: If A is an matrix and is the sum of the singular values of A, then
n×n AS
Atr(A) S
with equality if and only if A is symmetric and positivesemi-definite.
Theorem 1: If A is an matrix and is the sum of the singular values of A, then
n×n AS
Atr(A) S
with equality if and only if A is symmetric and positivesemi-definite.
Theorem 2: If A is an matrix, then there is an orthogonal matrix Q such that AQ is symmetric and positive semi-definite.If Y is any other orthogonal matrix, then
n×n
tr(AY) tr(AQ)with equality if and only if AY is symmetric and positivesemi-definite.
To find Q maximizing tr(AQ):

To find Q maximizing tr(AQ):
• Obtain SVD
TA = UΣV

To find Q maximizing tr(AQ):
• Obtain SVD
• Take
TA = UΣV
TQ = VU

To find Q maximizing tr(AQ):
• Obtain SVD
• Take
TA = UΣV
TQ = VU
Then: T T T( )( ) , AQ UΣV VU UΣU
which is symmetric and positive semi-definite.

Summary of Solution Steps
1. Find centers of gravity and .2. Form displacements
nT
i ii 1
A x y
yx
i i i i, . x x x y y y
3. Form the matrix 4. Obtain SVD
TA = UΣV
5. Take TQ = VU
6. Take t y Qx