Footprints: outline - IlmakehätieteetConcentration vs. flux footprints (3) – qualitative view...
43
Footprints: outline Üllar Rannik University of Helsinki Ø Concept of footprint and definitions Ø Analytical footprint models Ø Model by Korman and Meixner Ø Footprints for fluxes vs. concentrations Ø Footprints for gradient and profile techniques Ø Other types of footprint models Ø Lagrangian stochastic models Ø Examples
Transcript of Footprints: outline - IlmakehätieteetConcentration vs. flux footprints (3) – qualitative view...
-
Footprints: outlineÜllar Rannik
University of Helsinki
Ø Concept of footprint and definitionsØ Analytical footprint modelsØ Model by Korman and MeixnerØ Footprints for fluxes vs. concentrationsØ Footprints for gradient and profile
techniquesØ Other types of footprint modelsØ Lagrangian stochastic modelsØ Examples
-
Surface radiationfootprint function
upwelling part of the netradiation
Schmid H.P., 1997, AFM
-
“Field of view” of turbulent fluxmeasurement
-
Footprint function(of flux or concentration)
The footprint function f is given by the integralequation of diffusion
( ), ' ( ') 'x x Q x dxh f= òr r r r
R
where h is the quantity being measured at location xr
(note that xr is a vector) and ( ')Q xr is thesource emission rate/sink strength in the surface-vegetation volume R . h can be the concentration orthe vertical eddy flux and f is then concentration or flux footprint function, respectively
-
Definitions (1)• Effective fetch (Gash, 1986):
• F is an integral (cumulative)footprint function thatexpresses the upstream-integrated source weight asthe portion of a measured fluxcontributed by sources withina limited fetch, scaled by thetotal flux from sources in anunlimited fetch
• xF as the “F-fraction effectivefetch”
-
Definitions (2)• Footprint (Schmid, 2002): the
term footprint is used tosummarize the notions ofeffective fetch, source area orsensor footprints, but each ofthese terms will be definedmore formally
• Footprint function or the sourceweight function: Functionsdescribing the relationshipbetween the spatial distributionof surface sources/sinks and asignal
-
Definitions (3)• Source area: Fraction of the surface (mostly
upwind) containing effective sources and sinkscontributing to a measurement point
• smallest possible area to be responsible for agiven relative weight, P, (half, say P = 0.5) tothe measured value and termed it the sourcearea of level P. Source area, ΩP, is bounded bya footprint isopleth f (x, y, zm) = fP such that P isthe fraction of the total integrated footprintfunction contained in the source area
fp
-
Analytical models (1)Schuepp et al. (1990)• Neutral stratification• Constant wind profileHorst and Weil (1992)Integrates the 2D advection-diffusion eq. from surface to zmand obtains the expressiond forcross-wind integrated footprint
• U• A• Model implicit in x by mean plume height
A, b functions of parameter rp ~ 1.55, taken as constantr –parameter, suggested 1 ≤ r ≤ 2
U – mass weighedmean plume velocity
The cross-wind integrated (CWI) footprint is equal to CWIflux downwind of a unit point source, and is related to CWIconcenration through 2D advection-diffusion equation:
-
Analytical models (2)• Model by H&W (1992), eq. (9) in previous slide, not fully analytical, requires
numerical integration• H&W 1994 presented an approximate analytical solution (exact for power
law wind profiles)
-
AN ANALYTICAL FOOTPRINTMODEL FOR NON-NEUTRAL STRATIFICATIONby ROBERT KORMANN and FRANZ X. MEIXNER
Boundary-Layer Meteorology 99: 207–224, 2001
• Stationary gradient-diffusion formulation (as other models)• Heigh-independent cross-wind dispersion (as other models)• Power law profiles of the mean wind velocity U and the eddy
diffusivity K (as other models)• Power-law solution of the two-dimensional advection-diffusion
equation (PLS of ADE)• Horst and Weil (1992, 1994) reintroduce the Monin-Obukhov
similarity profiles into the PLS of ADE and derive the solutionfor footprint function -> infringement of the continuityequation.
• Kormann and Meixner derive the final solution for footprintfunction by keeping the power law profiles. Only then performfitting of power laws (K, U) to M-O similarity profiles
-
Footprint model Korman and Meixner (2)
Assume power law profiles forwind speed and eddydiffusivity
Then, two-dimensional advection-diffusion equation
solved by the expression forconcentration:
With A and B as follows and the shapefactor r = 2+m-n
Describe the vertical turbulentflux by gradient diffusionequation using cross-windintegrated concentration c andflux or footprint f (per unit pointsource):
-
Footprint model Korman and Meixner (3)Using the solution for cross-windintegrated concentration
and calculating the derivative ofthe mean plume height,
it followsHere• Horst and Weil re-introduce the M-O similarity profiles.
Consequently the eq. for mean plume height cannot be solvedanalytically.
• Korman and Meixner retain power law representation andintegrate the gradient of the mean plume height to obtain
From c(x,z) solution follows
-
Footprint model Korman and Meixner (4)Then, from the definition
the expression for cross-windintegrated footprint function
Which defines also the (cross-winddistributed) footprint function via
where and
Only now Korman and Meixner relate the power law profiles to M-Osimilarity profiles by proposing• Analytical solution relating power law expressions to M-O expressions
by using heigh z = zm• Numerical approach by minimizing
expressions by usingz1 = 3 z0 and z2 = (1+k) zm.
to obtain m and n and proportionalitycoefficient U and k
-
Flux footprint functions
-
Cross-wind integrated footprint function andsource areas (Kljun et al. 2002)
50% level source area
Kljun et al. Model for ABL(Lagrangian Stochastictrajectory model)
w* convective velocity scaleZi ABL height
-
Concentration vs. flux footprints – source area (1)
Rannik et al., 2012. In: EddyCovariance. A Practical Guideto Measurement and DataAnalysis. Eds. Aubinet, Vesala,Papale.
-
Concentration vs. flux footprints (2)
Rannik et al., 2012. In: EddyCovariance. A Practical Guideto Measurement and DataAnalysis. Eds. Aubinet, Vesala,Papale.
-
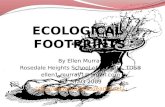
Concentration vs. flux footprints (3) – qualitative viewØ Surface emissions contribute to flux proportionally with vertical direction of
movement of air parcel.
Ø Close to measurement point emissions move predominantly upwards, contributing
to flux footprint with the same sign.
Ø Far from the measurement point, the number of upward and downward
movements of particles or fluid elements is more balanced
Ø Each air parcel contributes positively to the concentration footprint independently of
the direction of the trajectory. This increases the footprint value at distances further
apart from the receptor location.
Is the footprint of flux gradient
(or profile) more similar to flux or
concentration footprint?
-
Analytical models: gradient methodHorst 1999, BLM 90, 171-188.
Flux-gradient relationship defined as
The cross-wind integrated flux followsfrom cross-wind integratedconcentration profile:
(12)
s = x-x’ Note:heredenotesin H&W
yD
yC
-
Analytical models: grad and profile methodsThe cross-wind integrated footprint for gradient technique
-
Analytical models: gradient & profile method
Footprint for concentration profile flux estimates is similar to that of the footprint foreddy covariance measurements if the EC measurements are done at thearithmetic (stable) or geometric (unstable) mean height of the highest and lowestlevels
For profile methodZ2/Z1 = 4
-
Analytical models summary• assume a horizontally homogeneous turbulence field• assumption of steady-state conditions during the course of
the flux period analyzed• Based on analytical solution to advection-diffusion equation• Based on the Monin-Obukhov similarity theory (being also
applied to the layer of air above the tower)• no along-wind turbulent diffusion included => assume that no
contribution to a point flux is possible by downwind sources• unable to include the influence of non-local forcings to flux
measurements
-
Other types of footprint models• Analytical modelsØ Applicable to Atmospheric Surface Layer parameterisation only
• Lagrangian Stochastic modelsØ Require pre-defined turbulence fieldØ Can be applied to Atmospheric Boundary Layer (ABL) + vegetation canopy +
inhomogeneous flow + complex terrain
• RANS (Reynolds-Averaged Navier–Stokes) model basedØ Capable to simulate turbulence fieldØ Applicable to vegetation canopy + inhomogeneous flow + complex terrainØ Can be combined with LS modelØ Numerically demanding
• Large Eddy Simulation basedØ Most advanced modelsØ Capable to simulate turbulence fieldØ Applicable to ABL + vegetation canopy + inhomogeneous flow (+ terrain with
limited complexity)Ø Usually combined with LS modelØ Numerically very demanding
-
Lagrangian Stochastic models (1)Consists of• Trajectory simulation model• Estimator for footprint functionDiffusion of a scalar described by means of a stochastic differential equation,a generalized Langevin equation
where X(t) and V(t) denote trajectory co-ordinates and velocity as a functionof time t, C0 is the Kolmogorov constant, is the mean dissipation rate ofturbulent kinetic energy and W(t) describes the 3-dimensional Wienerprocess.
to be defined for each particular LS modelNB! Lagrangian Stochastic models not uniquely defined for more than 1Datmospheric flow
)()),(())(),(,()(
)()(
0 tdttCdtttttd
dtttd
WXVXaV
VX
e+=
=
))(),(,( ttt VXa
-
Lagrangian Stochastic models (2)Inputs required by LS trajectory model (Gaussian)• Mean wind speed• Variances of wind speed components• Momentum flux• Dissipation rate of TKE
In addition for non-Gaussian• Skewness of wind speed components (third moments)• Kurtosis of wind speed components (fourth moments)
-
Thomson’s trajectory model (3)• Satisfies the well-mixed condition• Horizontally homogeneous, x-axis directed along mean wind• Most widely used
D = U2*W2 - UW*UW;
Au = -c0*Eps/(2.*D) *(W2*u - UW*w) + dUW_dZ/2. + 0.5*w/D*(dU2_dZ*(W2*u - UW*w) +dUW_dZ*(-UW*u + U2*w));
Av = -c0*Eps/(2.*V2) * v + 0.5/V2 * dV2_dZ * v*w;
Aw = -c0*Eps/(2.*D) *(U2*w - UW*u) + 0.5*dW2_dZ + 0.5*w/D*(dW2_dZ*(U2*w - UW*u) +dUW_dZ*(-UW*w + W2*u));
c0 – Kolmogorov constant, usually = 4u, v, w – Lagrangian velocities (fluctuations, average subtracted from total velocity)Eps – dissipation rate of TKEU2, V2, W2 – variances of wind speedsUW – co-variance of along-wind and vertical wind speed
-
Forward vs. backward time frame (4)
Algorithm: integration of LS trajectories and calculation of statisticsa) at interception with observation level
b) at particle “touch-down”The forward and backward footprint estimates are theoretically equivalent. Inpractice the forward LS method can be efficiently employed only underhorizontally homogeneous conditions using horizontal coordinatetransformation. The backward calculated trajectories can be used directlywithout a coordinate transformation. Therefore, backward Lagrangianfootprint models hold the potential to be applied efficiently overinhomogeneous terrain and/or non-stationary conditions.
-
LS footprint estimators, forward (5)Concentration defined by
N is number of released particles and ni the number of intersections ofparticle trajectory i with the measurement height z; wij, Xij and Yij denote thevertical velocity and the coordinates of particle i at the intersection moment.
Flux defined by
The concentration and flux foorpints defined by
),,(11),,( 01 1
zYyXxQwN
zyxc ijijN
i
n
j ijs
i
--= åå= =
),,(1),,(),,( 01 1
zYyXxQww
NzyxczyxwF ijij
N
i
n
j ij
ijs
i
--== åå= =
yxc
Qf sC ¶¶
¶ 21=
yxwc
QyxF
Qf sF ¶¶
¶==
22 11¶¶
¶
-
LS footprint estimators, backward (6)Concentration defined by
where wi0 is the initial (release) vertical velocity of the particle i and wij is theparticle touchdown velocity.
Flux defined by
Note 1 In case of an elevated plane sourcewith strength Q at arbitrary heightEquations are applicable when:the factor 2 is removed and the touchdownvelocities are replaced by the vertical
crossing velocities of the trajectories withthe source level (both directions)
),,(12),,( 01 1
zYXQwN
zyxc ijijN
i
n
j ijs
i
åå= =
=
),,(2),,(),,( 01 1
0 zYXQww
NzyxczyxwF ijij
N
i
n
j ij
is
i
åå= =
==
-
Footprints & high vegetation (1)
n Rannik et al., 2012. In: EddyCovariance. A Practical Guide toMeasurement and Data Analysis.Eds. Aubinet, Vesala, Papale.
-
Footprints inside and over forest (2)
Rannik et al., 2012. In: EddyCovariance. A Practical Guideto Measurement and DataAnalysis. Eds. Aubinet,Vesala, Papale.
-
Flux footprint pdf with Gaussian (G) and non-Gaussian (NG) turbulence profiles (4)
Rannik et al., 2012. In:Eddy Covariance. APractical Guide toMeasurement andData Analysis. Eds.Aubinet, Vesala,Papale.
G – GaussianNG – Non-Gaussian
-
Stable ABL (1)
-
Stable ABL (2)
-
Thomson’s model for general x-y co-ordinates(horizontally homogeneous)
double D = U2*V2*W2 - (UW*UW*V2 + VW*VW*U2);double B = C0*eps/2;
Au = -B/D *((V2*W2 - VW*VW)*u + UW*VW*v - UW*V2*w) + dUW_dZ/2.+ 0.5*w/D * dsU2_dZ*((V2*W2-VW*VW)*u + UW*VW*v - UW*V2*w)+ 0.5*w/D * dUW_dZ*(-UW*V2*u - U2*VW*v + U2*V2*w);
Av = -B/D *(UW*VW*u + (U2*W2 - UW*UW)*v - U2*VW*w) + dVW_dZ/2.+ 0.5*w/D * dsV2_dZ*( UW*VW*u + (U2*W2-UW*UW)*v - VW*U2*w)+ 0.5*w/D * dVW_dZ*(-UW*V2*u - U2*VW*v + U2*V2*w);
Aw = -B/D *(-UW*V2*u - VW*U2*v + U2*V2*w) + dsW2_dZ/2.+ 0.5*w/D * dUW_dZ*((V2*W2 - VW*VW)*u + UW*VW*v - UW*V2*w)+ 0.5*w/D * dVW_dZ*(UW*VW*u + (U2*W2 - UW*UW)*v - VW*U2*w)+ 0.5*w/D * dsW2_dZ*(-UW*V2*u - VW*U2*v + U2*V2*w);
u, v, w – Lagrangian velocities (fluctuations, average component removed)eps – dissipation rate of TKEU2, V2, W2 – variances of wind speedsUW, VW – co-variances of wind speeds
-
Inhomogeneous flow and complexterrain
• Urban environment• Complex terrain + vegetation
-
Urban area (1)wind vector footprint
Aerial photograph of the measurement location. Topography of the measurement site(relative to sea level) is denoted by black contours. Vector plots (a) and the flux footprintfunction (b) (scale 10−6, the unit of flux footprint is m−2) are shown when the winddirection is perpendicular to the road (117o), Geostrophic wind speed is 10ms−1 and theboundary layer is neutrally stratified. The location of the measurement tower is marked bya white star, and its distance to the edge of the road is around 150 m. (After Järvi et al.,2009)
-
Urban area (2)
Cross-wind integrated flux footprint as estimated for surface sources forflux measurements from road direction (wind direction 117°). Neutralstratification was assumed. Measurement height H = 31 m. Footprintfunction as obtained from analytical (Horst and Weil, 1994) and numericalmodel predictions. After Järvi et al. (2009).
-
Complex terrain + inhomogeneous canopy (3)
Stand structures (A) and itsdistribution along west-easttransect together withtopography variation (B) usedin the simulation for Hyytiäläsite.
Distance is counted from fluxmeasurement tower; a narrowoblong lake is located at about750 m to the west.
After Sogachev et al. (2004),AFM.
-
Complex terrain + inhomogeneous canopy (4)
Normalised vertical CO2 fluxes in case of west-to east neutral airflow atHyytiälä site. The fluxes at heights 24 were normalised with far upwindvalues at the same height.
A- Influence of heterogeneous vegetation onlyB - Together with topography variations.
After Sogachev et al. (2004), AFM.
-
Complex terrain + inhomogeneous canopy (5)
Footprint functions and their cumulative values for twoheights at Hyytiälä measurement tower. Constantsurface emission at ground surface and canopy uptake ateffective level 10 m were considered. The figure showsan influence of varying topography on footprintfunction. After Sogachev et al. (2004), AFM.
-
Milestones in footprint concept developmentAuthor Remarks
Pasquill (1972) First model description, concept of effective fetchGash (1986) Neutral stratification, concept of cumulative fetchSchuepp et al. (1990) Use of source areas, but neutral stratification and averaged wind velocityLeclerc and Thurtell (1990) Lagrangian footprint modelHorst and Weil (1992) 1-dimensional footprint modelSchmid (1994), (1997) Separation of footprints for scalars and fluxesLeclerc et al. (1997) LES model for footprintsBaldocchi (1997) Footprint model within forestsRannik et al. (2000; 2003) Lagrangian model for forestsKormann and Meixner (2001) Analytical model with exponential wind profileKljun et al. (2002) Three dimensional Lagrangian model for various turbulence stratifications with
backward trajectories
Sogachev and Lloyd (2004) Boundary-layer model with 1.5 order closureSogachev et al. (2004) Footprint estimates for a non-flat topographyStrong et al. (2004) Footprint model with reactive chemical compoundsCai and Leclerc (2007) Footprints from backward and forward in-time particle simulations driven with LES
data
Klaassen and Sogachev (2006) Footprint estimates for a forest edgeVesala et al. (2008a) Footprint estimates for a complex urban surfaceSteinfeld et al. (2008)
Castellvi (2012)
Footprint model with LES embedded particles
Footprints for surface renewal method
-
Recent publications on flux footprints...
Masseroni, D., Corbari, C., Mancini, M., Validation of theoretical footprintmodels using experimental measurements of turbulent fluxes over maize fieldsin Po Valley, Environmental Earth Sciences, 72, pp 1213-1225, 2014.DOI10.1007/s12665-013-3040-5
Bai, J., Jia, L., Liu, S., Xu, Z., Hu, G., Zhu, M., Song, L., Characterizing theFootprint of Eddy Covariance System and Large Aperture ScintillometerMeasurements to Validate Satellite-Based Surface Fluxes, Geoscience andRemote Sensing Letters, 12, pp. 943 – 947, 2015.