Finding Narrow Passages with Probabilistic Roadmaps: The Small-Step Retraction Method Presented by:...
16
Finding Narrow Passages with Probabilistic Roadmaps: The Small-Step Retraction Method Presented by: Deborah Meduna and Michael Vitus by: Saha, Latombe, Chang, and Prinz
-
date post
19-Dec-2015 -
Category
Documents
-
view
215 -
download
1
Transcript of Finding Narrow Passages with Probabilistic Roadmaps: The Small-Step Retraction Method Presented by:...
Finding Narrow Passages with Probabilistic Roadmaps: The
Small-Step Retraction Method
Presented by: Deborah Meduna and Michael Vitus
by: Saha, Latombe, Chang, and Prinz

Outline
• Motivations
• Small-Step Retraction Planner– Object Thinning– Optimist Strategy– Pessimist Strategy
• Experimental Results
• Conclusions

Overview
• PRM efficiency decreases dramatically with narrow passages
• Developed an efficient planner for configuration spaces with narrow passages– Built off an existing planner, SBL– Also efficient for configuration spaces without
narrow passages

SBL - review
• Single-query Bi-directional Lazy-collision-checking– “Single-query”: PRM is built for specific start
and goal configurations– Connect sample trees originating from start
and goal configurations

Motivations (1)
• Increasing free-space slightly greatly increases the effectiveness of a PRM planner

Motivations (2)
• SBL prefers wider paths
• False passages created by object thinning are usually narrower than true passages

False Passages
• Thinning may generate a path through a passage that is not feasible for the robot in F.
X
sX
g
Rw1 w2

Small-Step Retraction Planner (SSRP)
• Retract only colliding configurations which are likely to be near free-space and/or near useful passages
• Generate PRM in “fattened free space” F*. – Use “thinned” obstacles and/or robot.– Narrow passages become wider (i.e. easier)
• Retract points in F* to points in true free space F–

Object Thinning
• Space occupied by original robot, R(c), is related to space occupied by thinned robot, R*(c), by:
• Thinning should maintain kinematic constraints
Incorrect Thinning Correct Thinning

Object Thinning
Medial Axis Balls
• Objects are thinned using the Medial Axis (MA) technique
• Objects are thinned by uniformly reducing the size of MA balls
• Thinning adds to pre-computation costs
Sample Thinned Component

Optimist Algorithm
• Repairs conflicts at the end of the path planning
• Fast • Might not be able to
resolve conflicts at the end. (“false” passages)
• K = 100
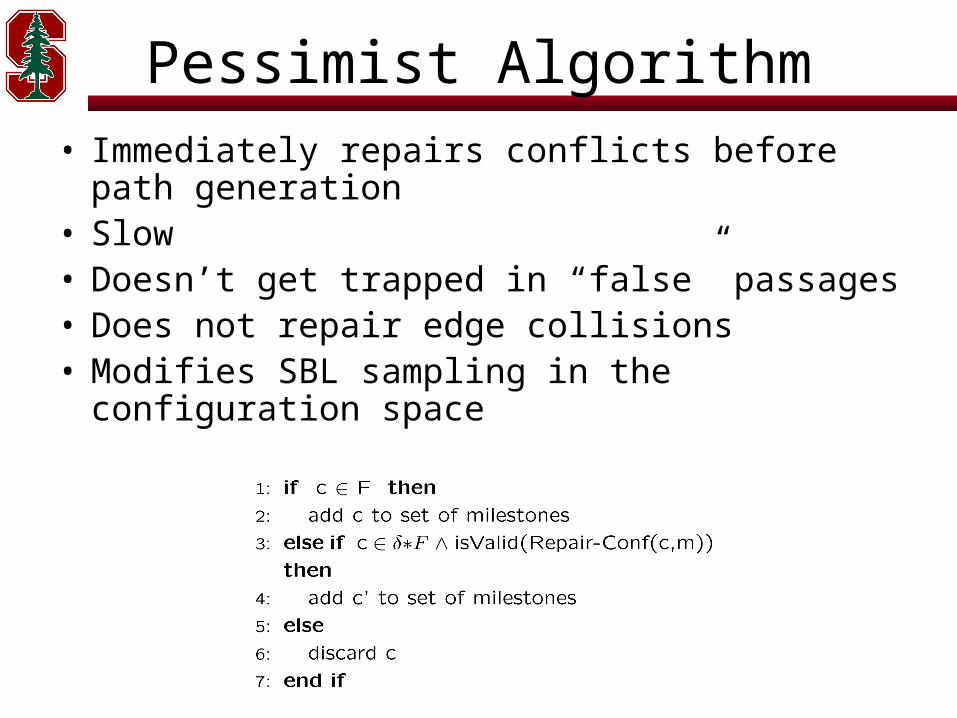
Pessimist Algorithm• Immediately repairs conflicts before path
generation• Slow• Doesn’t get trapped in “false” passages• Does not repair edge collisions • Modifies SBL sampling in the configuration
space

SSRP - Overall Planner
• Pessimist is slower than optimist but faster than SBL
• N is small (i.e. N = 5)

Experimental Results(1)

Experimental Results(2)

Conclusions
• Fast planner which handles configuration spaces with/without narrow passages
• SSRP is more reliable and faster than SBL
• SSRP may still fail when passages are very narrow and curved– Small percentage of real problems