Final Project Presentation Schedule - Computer Science &...
23
Final Project Presentation Schedule Presentation days: April 22, 24, and 29 A single presentation is required for a team Each presentation has 12 + 3 minutes Q&A Send me an email ([email protected]) that includes: • Your name and ranking of the dates starting from the most preferred • Earlier email has higher priority in choosing the date
Transcript of Final Project Presentation Schedule - Computer Science &...

Final Project Presentation Schedule
Presentation days:April 22, 24, and 29
A single presentation is required for a team
Each presentation has 12 + 3 minutes Q&A
Send me an email ([email protected]) that includes:• Your name and ranking of the dates starting from the
most preferred
• Earlier email has higher priority in choosing the date
Materials covered in the presentation
For a hands-on project
• An introduction of the background
• A brief literature review
• Methodology of your proposed method
• Experimental results if any
For a survey project
• An introduction of the background
• A discussion on the papers you reviewed
• Comparison of the methods/groups you reviewed

Motion Analysis by Optical Flow
Motion field:
• Measured on 2D images
• The projection of 3D velocity field on the image plane
Optical flow: the apparent motion of brightness patterns
• Optical flow ≠ Motion field
• Important assumptions/constraints
• Brightness constancy
• Small motion
• Constant motion in a neighborhood
Dense – estimating motion for every pixel!
Object Tracking
Tracking rigid object with rigid motion (scaling and translation)
• Global motion
• Examples: tracking vehicles, buildings, etc. from the same view angle
Tracking object with rigid/nonrigid motion
• Global motion + view change + local deformation
• Examples: tracking animals, persons, faces, etc.

Object Tracking – Motion Analysis from Multiple
Frames
Tracking vs optical flow:
• Tracking is often applied for a few specified targets in the video
• Optical flow is applied for any points on the image –dense optical flow
• Both of them need to compute the correspondence between images
Example

Object Tracking – Motion Analysis from Multiple
Frames
tth frame t+1th frame
(𝑥𝑡 , 𝑦𝑡) (𝑥𝑡+1, 𝑦𝑡+1)
𝒔𝒕
𝒐𝒕
𝒔𝒕+𝟏
𝒐𝒕+𝟏
Question:
Given 𝐬𝒕 and 𝐨𝒕+𝟏 = 𝑥𝑡+1, 𝑦𝑡+1 , how to
estimate 𝐬𝒕+𝟏?
For a point 𝑝 = (𝑥𝑡 , 𝑦𝑡) at the 𝑡𝑡ℎ time frame with a velocity of 𝑣𝑡 =
(𝑣𝑥𝑡 , 𝑣𝑦𝑡), we define a state vector 𝐬𝒕 = 𝑥𝑡 , 𝑦𝑡 , 𝑣𝑥𝑡, 𝑣𝑦𝑡𝑻
𝑣𝑡 = (𝑣𝑥𝑡 , 𝑣𝑦𝑡)p

General Strategy for Object Tracking
Predict position for next frame
Initialization Object Detection
Local search Template matching
Finalize the position
A well-known algorithm following the strategy -- Kalman filter

Tracking – General Probabilistic Formulation
Given
•𝑃(𝐬𝑡|𝐨0, ⋯ , 𝐨𝑡) - “Prior”
We should like to know
•𝑃(𝐬𝑡+1|𝐨0, ⋯ , 𝐨𝑡)- “Predictive distribution”
•𝑃(𝐬𝑡+1|𝐨0, ⋯ , 𝐨𝑡, 𝐨𝑡+1)– “Posterior”
How to compute them?
𝒔𝟎
𝒐𝟎
𝒔𝟏
𝒐𝟏
… 𝒔𝒕
𝒐𝒕
𝒔𝒕+𝟏
𝒐𝒕+𝟏
𝑃 𝐬𝑡+1 𝐨0, ⋯ , 𝐨𝑡 =
𝐬𝑡
𝑃 𝐬𝑡+1, 𝐬𝑡 𝐨0, ⋯ , 𝐨𝑡
=
𝐬𝑡
𝑃 𝐬𝑡+1 𝐬𝑡 , 𝐨0, ⋯ , 𝐨𝑡 ∗ 𝑃(𝐬𝑡|𝐨0, ⋯ , 𝐨𝑡)

Tracking – General Probabilistic Formulation
Given
•𝑃(𝐬𝑡|𝐨0, ⋯ , 𝐨𝑡) - “Prior”
We should like to know
•𝑃(𝐬𝑡+1|𝐨0, ⋯ , 𝐨𝑡)- “Predictive distribution”
•𝑃(𝐬𝑡+1|𝐨0, ⋯ , 𝐨𝑡, 𝐨𝑡+1)– “Posterior”
How to compute them?
𝒔𝟎
𝒐𝟎
𝒔𝟏
𝒐𝟏
… 𝒔𝒕
𝒐𝒕
𝒔𝒕+𝟏
𝒐𝒕+𝟏
𝑃 𝐬𝑡+1 𝐨0, ⋯ , 𝐨𝑡, 𝐨𝑡+1
=𝑃 𝐨𝑡+1 𝐬𝑡+1, 𝐨0 , ⋯ , 𝐨𝑡 ∗𝑃 𝐬𝑡+1 𝐨0, ⋯ , 𝐨𝑡
σ𝐬𝑡+1 𝑃 𝐨𝑡+1 𝐬𝑡+1, 𝐨0 , ⋯ , 𝐨𝑡 ∗𝑃 𝐬𝑡+1 𝐨0, ⋯ , 𝐨𝑡
Tracking – General Assumptions
• First-order markov
• The current state only depends on the state of the previous time step
• 𝑃 𝐬𝑡 𝐬0, ⋯ , 𝐬𝑡−1 = 𝑃 𝐬𝑡 𝐬𝑡−1
• Given the current state, the measurement at current time step is independent of the previous measurements
• 𝑃 𝐨𝑡 𝒔𝒕, 𝐨0, ⋯ , 𝐨𝑡−1 = 𝑃 𝐨𝑡 𝐬𝑡

Tracking – General Probabilistic Formulation
𝑃 𝐬𝑡+1 𝐨0, ⋯ , 𝐨𝑡 =
𝐬𝑡
𝑃 𝐬𝑡+1 𝐬𝑡 , 𝐨0, ⋯ , 𝐨𝑡 ∗ 𝑃(𝐬𝑡|𝐨0, ⋯ , 𝐨𝑡)
=
𝐬𝑡
𝑃 𝐬𝑡+1 𝐬𝑡 ∗ 𝑃(𝐬𝑡|𝐨0, ⋯ , 𝐨𝑡)
𝑃 𝐬𝑡+1 𝐨0, ⋯ , 𝐨𝑡, 𝐨𝑡+1 =𝑃 𝐨𝑡+1 𝐬𝑡+1, 𝐨0 , ⋯ , 𝐨𝑡 ∗ 𝑃 𝐬𝑡+1 𝐨0, ⋯ , 𝐨𝑡
σ𝐬𝑡+1 𝑃 𝐨𝑡+1 𝐬𝑡+1, 𝐨0 , ⋯ , 𝐨𝑡 ∗ 𝑃 𝐬𝑡+1 𝐨0, ⋯ , 𝐨𝑡
=𝑃 𝐨𝑡+1 𝐬𝑡+1 ∗ 𝑃 𝐬𝑡+1 𝐨0, ⋯ , 𝐨𝑡
σ𝐬𝑡+1 𝑃 𝐨𝑡+1 𝐬𝑡+1 ∗ 𝑃 𝐬𝑡+1 𝐨0, ⋯ , 𝐨𝑡
Prediction:
Update:
System model
Measurement model

Kalman Filtering
Assumptions
• Linear state model
• The next state 𝐬𝒕+𝟏 is linearly related to the current state 𝐬𝒕
• Uncertainty satisfy a Gaussian

Linear State Model
s𝑡+1 = Φs𝑡 +w𝑡
Φ: state transition matrix
w𝑡: system perturbation satisfying a Gaussian distribution w𝑡~𝑁(0,𝑾)
If motion between two frames is small,
Φ =
1 0 1 00 1 0 10 0 1 00 0 0 1
𝒔𝒕
𝒐𝒕
𝒔𝒕+𝟏
𝒐𝒕+𝟏
Temporal transition

Measurement Model
o𝑡 = Hs𝑡 + r𝑡
• H describes how the measurement relates to the state vector
• For example, 𝐨𝒕 = 𝑥𝑡 , 𝑦𝑡 is the measured feature position
• r𝑡 is the measurement uncertainty satisfying a Gaussian
distribution r𝑡~𝑁(0,𝑹)
𝒔𝒕
𝒐𝒕
𝒔𝒕+𝟏
𝒐𝒕+𝟏
𝐻 =1 0 0 00 1 0 0
The simplest case

Kalman Filtering
Time update:• predict new position
• Predict searching area
Initialization
Local search
Measurement update:• Refine the localization results
• Refine the error
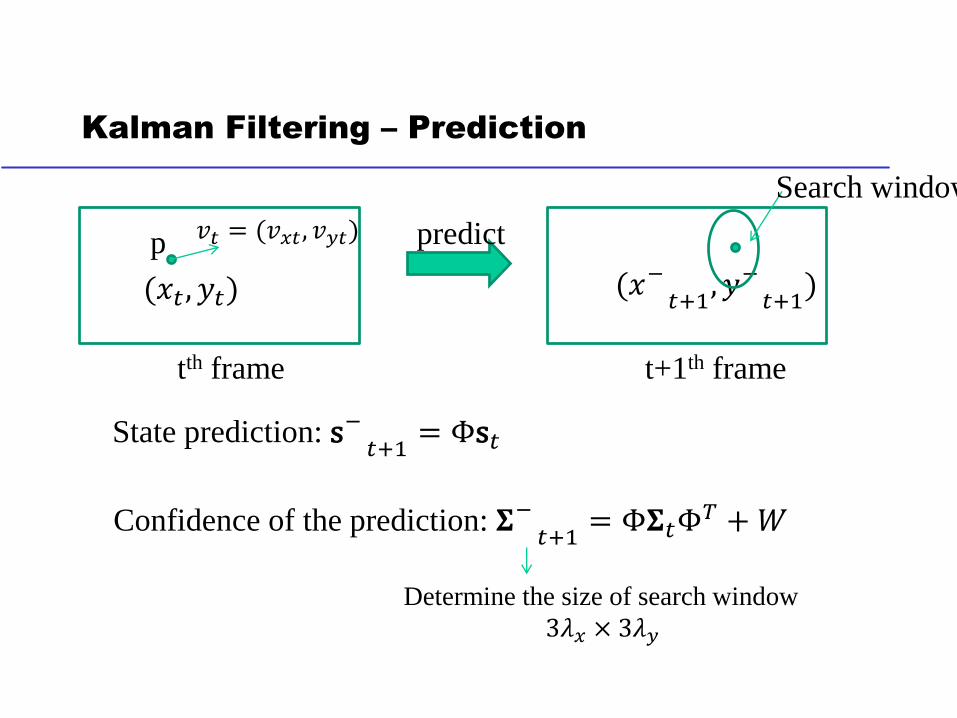
Kalman Filtering – Prediction
tth frame t+1th frame
(𝑥𝑡 , 𝑦𝑡) (𝑥−𝑡+1
, 𝑦−𝑡+1
)
𝑣𝑡 = (𝑣𝑥𝑡 , 𝑣𝑦𝑡)p predict
Search window
State prediction: s−𝑡+1
= Φs𝑡
Confidence of the prediction: 𝚺−𝑡+1
= Φ𝚺𝑡Φ𝑇 +𝑊
Determine the size of search window
3𝜆𝑥 × 3𝜆𝑦

Kalman Filtering – Updating
t+1th frame
(𝑥−𝑡+1
, 𝑦−𝑡+1
)
Searching result
(ො𝑥𝑡+1, ො𝑦𝑡+1)
Kalman gain: 𝐾𝑡+1 = σ𝑡+1− 𝐻𝑇 𝐻σ𝑡+1
− 𝐻𝑇 + 𝑅 −1
t+1th frame
Updating(𝑥𝑡+1, 𝑦𝑡+1)
A weighting factor determines
• the contribution of the measurement and the prediction in
the final estimation -- which one is more reliable
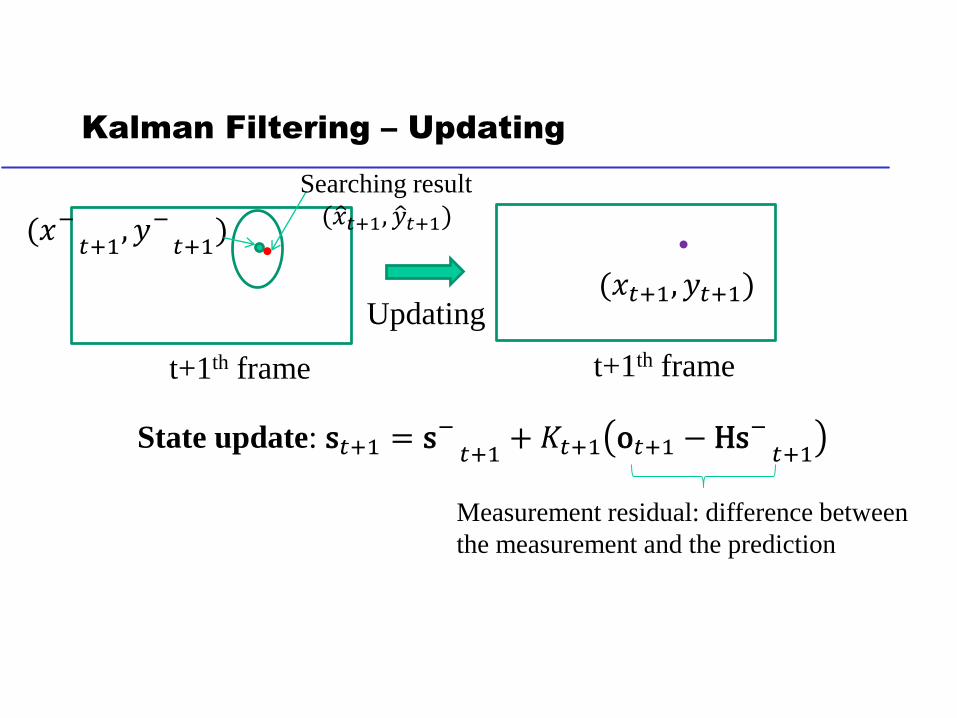
Kalman Filtering – Updating
t+1th frame
(𝑥−𝑡+1
, 𝑦−𝑡+1
)
Searching result
(ො𝑥𝑡+1, ො𝑦𝑡+1)
State update: s𝑡+1 = s−𝑡+1
+ 𝐾𝑡+1 o𝑡+1 − Hs−𝑡+1
t+1th frame
Updating(𝑥𝑡+1, 𝑦𝑡+1)
Measurement residual: difference between
the measurement and the prediction

Kalman Filtering – Updating
t+1th frame
(𝑥−𝑡+1
, 𝑦−𝑡+1
)
Searching result
(ො𝑥𝑡+1, ො𝑦𝑡+1)
State update: s𝑡+1 = s−𝑡+1
+ 𝐾𝑡+1 o𝑡+1 − Hs−𝑡+1
t+1th frame
Updating(𝑥𝑡+1, 𝑦𝑡+1)
Error covariance update: Σ𝑡+1 = (𝐼 − 𝐾𝑡+1𝐻)σ𝑡+1−

Kalman Filtering
Time update:• predict new position
• Predict searching area
Initialization
Local search
Measurement update:• Refine the localization results
• Refine the error
𝑅 =4 00 4
𝑊 =
9 0 0 00 9 0 00 0 4 00 0 0 4
s0
Σ0 =
100 0 0 00 100 0 00 0 36 00 0 0 36

Limitation of Kalman Filtering
Failed cases:
• State transition is not linear
• Sudden motion direction/velocity changes
• Uncertainty is not Gaussian
• State vector is not unimodal
• Multiple targets
A new method Particle Filtering
Extended Kalman filtering
Unscented Kalman filtering

Reading Assignments
An Introduction to the Kalman Filter by Welch and Bishop
http://www.cs.unc.edu/~welch/media/pdf/kalman_intro.pdf