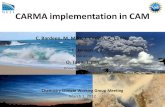
CARMA Dick Plambeck UC Berkeley (for the CARMA consortium) .

1
FHWA Update - Operations Research:CARMA and Next Generation Traffic Management
Systems (TMS)
TRB Freeway Operations Committee Mid-Year Meeting
August 26, 2019
Jon Obenberger, Ph.D., [email protected]
FHWA Office of Operations Research and Development

Next Generation Traffic Management Systems
Vision: The next generation of TMSs are actively managing and optimizing the performance of the surface transportation system.
Mission: To develop, test and facilitate the use of advanced technologies, tools and methods to actively manage and seamlessly operate the next generation of TMSs with the applicable physical, connected & technology based platforms or ecosystems.
Coordination:FHWA Team – HRDO, HOTM, HOTO, RC, ITS JPOExternal – Traffic Management Center Pooled Fund Study, TRB Technical Committees, AASHTO CTSO ITS Work Group
2

Next Generation Traffic Management Systems
Outcomes: Public agencies use the tools, methods, & resources developed by FHWA to improve travel by:
• Assess & prepare plans to improve capabilities & performance of TMSs;• Develop capabilities & deploy infrastructure to collect, use & share information w/ CAVs &
connected travelers;• Develop, test & maintain a modular digital platform & use of technologies to share
information & proactively coordinate w/other systems, service providers, & public; • Actively manage & optimize operational strategies, control plans, & use of public resources; & • Automatically monitor & report on performance of the systems & surface transportation
system.
3

Next Generation Traffic Management Systems
Focus Areas or Tracks: 1. Assess, Improve & Report on Capabilities & Performance of TMSs2. Plan, Develop & Test Next Generation TMS3. Automate & Optimize Active Management & Operations of TMSs
Ongoing Projects:• Decision Support Subsystems for Next Generation of TMSs – Guidance• Framing the Capabilities of the Next Generation of TMSs - Awareness• Vision & Concept of Operations for Next Generation of TMSs – Guidance• Transitioning From Legacy to Next Generation TMSs - Awareness
New Projects in 2020:• Assessing the Capabilities of TMSs – Guidance & Awareness (Jointly funded by
FHWA & TMC Pooled Fund Study)
4

Driving InnovationSource: FHWA.
Transportation Systems Management and Operations -
Use Cases and Automated Driving System (ADS) Update

6
Driving Automation Systems ADS
SAE Automated Vehicle Levels
SAELevels of Automation
SAE J3016
No Driving Automation
Source: SAE 2019

SUBHEAD
7
TSMO Strategies Table
Highlights the range of relevant TSMO strategies and their relationships to Cooperative-ADS.
Data TableUse-Case
Framework
Specifies the traffic management service (TMS) operational actions for each use-case in relation to the Cooperative-ADS automation levels and cooperation classes.
Scenarios
Describes sample events, circumstances, and road conditions under specified use-cases in order to demonstrate TMS and Cooperative-ADS stakeholder interactions.
Identifies the essential data elements needed to implement the corresponding TSMO strategies.
Elements of the High-Level ConOps

8
Cooperative Automation USE CASES Example scenarios:
Engage in a platoon defined by a geofence.
Leader maintains safe time gap.
Followers maintain inter-platoon time gap.
Platoon size in one lane reduced from 5 cars to 2 cars.
Possible maneuvers with other Cooperative-ADS-equipped vehicles.
Road Weather
Example scenarios: Reduced command
speed entering work zone.
Defined by a stationary geofence.
Lane change assignment prior to entering work zone.
Maintain safe time gap through the work zone.
Possible maneuvers with other Cooperative-ADS-equipped vehicles.
Example scenarios: Reduced command
speed entering an area with low visibility.
Defined by a dynamic geofence.
Engage in larger time gap.
Maintain lane guidance.
Possible maneuvers with other Cooperative-ADS-equipped vehicles.
Basic Travel1 43
Example scenarios: Reduced command
speed entering traffic incident event.
Determined by infield geofence.
Lane change to provide space for first-responders.
Possible maneuvers with other Cooperative-ADS-equipped vehicles.
2Traffic Incident
Management (TIM) Work Zones
Source: FHWA. Source: FHWA. Source: FHWA. Source: FHWA.

9
Key TSMO Strategies and Cooperative-ADS
TSMO Strategies and Baseline Data Elements

10
Group 1 Priority Situations
1. Basic Travel: Merging onto a highway.
2. Work Zone Management: One-lane, two-way traffic taper.
3. Road Weather Management: Vehicle adjusts speed and prepares for other adjustments at beginning of weather event zone.
4. Traffic Incident Management: Vehicle moves out of way and clears space for first-responder vehicles driving towards incident.
Prioritization of TSMO Situations

SUBHEAD
11
Elements of the Detailed ConOps
1. Introduction – Purpose, document overview, and scope.
2. Use Cases and Priority Situations – Typology, use cases, travel areas, situation groups, situations, and priority situations by use case area.
3. Examination of the four Use Case situations (Group 1) in relation to the following: a) Description of situation, incl. operational configuration.b) Operational needs.c) Identification of stakeholders, entities, and players.d) Operational description (user-oriented).e) Concept diagram and description of situation.f) Triggers to invoke situation.g) Requirements.h) Applicable performance metrics.i) Needs-to-requirements traceability matrix.

SUBHEAD
Situation “Triggers”
12
Describes the various triggers potentially used to start executing the situation.
Each situation has different triggers. For example, the triggers for the Basic Travel situation are:1. Broadcast by ADS vehicle on the ramp.2. Acceleration of any vehicle on the parallel ramp lane next to the mainline lanes.3. Activation of the left-hand blinker on the vehicle on the ramp intending to merge onto the
highway (NOT a CARMA program consideration).4. Execution of the actual merging maneuver by the vehicle in the ramp acceleration lane.
Note that not all triggers are applicable or used within CARMA.

TSMO
13
Functional RequirementsFunctional Requirements are for the specific situation (not for the entire use case) and are high-level.Includes indication of applicability of requirement to CARMA.
IDs numbering:• BT-Rx.xx (Basic Travel).• TIM-Rx.xx (Traffic Incident
Management).• WZM-Rx.xx (Work Zone).• RWM-Rx.xx (Road Weather).
Example shown is for Basic Travel situation.
FR ID# Functional Requirement Applicable to CARMA
BT-R1.01 An ADS vehicle with at least Cooperation Class 1 shall provide for the capability to avoid crashes with other vehicles (vehicles with or without cooperation class capabilities) prior to, during, and after completion of the merging maneuver. Communications shall be possible at least every 1/10 sec.
Yes, Class 2 and higher
BT-R1.02 An ADS vehicle with at least Cooperation Class 1 shall be able to broadcast its location, speed, heading, and brake status at least every 1/10 sec.
Yes, Class 2 and higher
BT-R1.03 An ADS vehicle with at least Cooperation Class 1 shall be able to receive, decode, process, analyze and use locations, speeds, and headings from other ADS vehicles with at least Cooperation Class 1 within its short-range communications range at least every 1/10 sec.
Yes, Class 2 and higher
BT-R1.04 An ADS vehicle with at least Cooperation Class 1 shall be able to receive, decode, process, analyze and use braking status from other ADS vehicles with at least Cooperation Class 1 within its short-range communications range at least every 1/10 sec.
Yes, Class 2 and higher
BT-R1.05 An ADS vehicle with at least Cooperation Class 1 shall be able to receive, decode, process, analyze and use locations, speeds, and headings from other ADS vehicles with at least Cooperation Class 1 via long-range communications within a configurable geofenced area at least every 1/10 sec.
Optional, Class 2 and
higher
BT-R1.06 An ADS vehicle with at least Cooperation Class 1 shall be able to receive, decode, process, analyze and use braking status from other ADS vehicles with at least Cooperation Class 1 via long-range communications within a configurable geofenced area at least every 1/10 sec.
Optional, Class 2 and
higher
BT-R1.07 An ADS vehicle with at least Cooperation Class 1 shall be able to broadcast its driving path for the last one minute at least every 1 sec. No

14 Source: FHWA
Source: FHWA.
Scenario planning. Algorithm development. Field tests.
Next Steps:

More Information
FHWA Site – https://highways.dot.gov/research/research-programs/operations/CARMA
GitHub Site – https://github.com/usdot-fhwa-stol
Confluence Site – https://usdot-carma.atlassian.net/wiki
Jira Site – https://usdot-carma.atlassian.net/secure/Dashboard.jspa
15