
Fault detection, isolation and estimation for Takagi...
30
Fault detection, isolation and estimation for Takagi-Sugeno nonlinear systems Dalil Ichalal ∗ , Benoˆ ıt Marx †,‡ , Jos´ e Ragot †,‡ , and Didier Maquin †,‡ ∗ Laboratoire d’Informatique, Biologie Int´ egrative et Syst` emes Complexes (IBISC), Universit´ e d’Evry Val d’Essonne, 40, rue de Pelvoux, Courcouronne, 91080 Cedex, France [email protected] † Universit´ e de Lorraine, Centre de Recherche en Automatique de Nancy (CRAN), UMR 7039, 2 avenue de la Forˆ et de Haye, 54516 Vandoeuvre-l` es-Nancy, France ‡ CNRS, CRAN, UMR 7039, France e-mail: {benoit.marx, jose.ragot, didier.maquin}@univ-lorraine.fr December 29, 2012 Abstract This article is dedicated to the problem of fault detection, isolation and estimation for nonlinear systems described by a Takagi-Sugeno (T-S) model. One of the interests of this type of models is the possibility to extend some tools and methods from the linear system case to the nonlinear one. The principle of the proposed strategy is to transform the problem of simultaneously minimizing the perturbation effect and maximizing the fault effect, on the residual vector, in a simple problem of L 2 -norm minimization. A linear system is used to define the ideal response of the residual signal to the fault. Then the aim is to synthesize a residual generator that both minimizes the difference between real and ideal responses and the influence of the disturbance. The minimization problem is formulated by using the bounded real lemma (BRL) and linear matrix inequality (LMI) formalism. After studying the general framework, a special case of systems with actuator and sensor faults is considered where the fault incidence matrix is not full column rank. Simulation examples are given to illustrate the proposed method. Finally, Polya’s theorem is used to reduce the conservatism of the proposed result. The obtained relaxation is also illustrated by a numerical example. Takagi-Sugeno systems, robust fault diagnosis, robust fault estimation, L 2 approach, LMIs. 1 Introduction Diagnosis issues are becoming very important to ensure a good supervision of systems and guarantee the safety of human operators and equipments even if system complexity increases. That is why, in the last decades, many theories and methods have been developed for linear systems in the fields of fault diagnosis [32, 11, 7] and fault tolerant control [17, 20, 39]. Unfortunately, the linearity assumption of 1
Transcript of Fault detection, isolation and estimation for Takagi...

Fault detection, isolation and estimation for Takagi-Sugeno
nonlinear systems
Dalil Ichalal∗, Benoıt Marx†,‡, Jose Ragot†,‡, and Didier Maquin†,‡
∗ Laboratoire d’Informatique, Biologie Integrative et Systemes Complexes (IBISC),
Universite d’Evry Val d’Essonne, 40, rue de Pelvoux, Courcouronne, 91080 Cedex, France
[email protected]† Universite de Lorraine, Centre de Recherche en Automatique de Nancy (CRAN),
UMR 7039, 2 avenue de la Foret de Haye, 54516 Vandoeuvre-les-Nancy, France‡ CNRS, CRAN, UMR 7039, France
e-mail:benoit.marx, jose.ragot, [email protected]
December 29, 2012
Abstract
This article is dedicated to the problem of fault detection, isolation and estimation for nonlinear
systems described by a Takagi-Sugeno (T-S) model. One of the interests of this type of models is
the possibility to extend some tools and methods from the linear system case to the nonlinear one.
The principle of the proposed strategy is to transform the problem of simultaneously minimizing the
perturbation effect and maximizing the fault effect, on the residual vector, in a simple problem of
L2-norm minimization. A linear system is used to define the ideal response of the residual signal
to the fault. Then the aim is to synthesize a residual generator that both minimizes the difference
between real and ideal responses and the influence of the disturbance. The minimization problem is
formulated by using the bounded real lemma (BRL) and linear matrix inequality (LMI) formalism.
After studying the general framework, a special case of systems with actuator and sensor faults is
considered where the fault incidence matrix is not full column rank. Simulation examples are given
to illustrate the proposed method. Finally, Polya’s theorem is used to reduce the conservatism of the
proposed result. The obtained relaxation is also illustrated by a numerical example.
Takagi-Sugeno systems, robust fault diagnosis, robust fault estimation,L2 approach, LMIs.
1 Introduction
Diagnosis issues are becoming very important to ensure a good supervision of systems and guarantee
the safety of human operators and equipments even if system complexity increases. That is why, in the
last decades, many theories and methods have been developed for linear systems in the fields of fault
diagnosis [32, 11, 7] and fault tolerant control [17, 20, 39]. Unfortunately, the linearity assumption of
1

a system is generally a local property, i.e. a linear model describes the behavior of a real system only
around a single operating point. Furthermore, when a fault occurs, the operating point of the system may
change, therefore, the considered linear model is no longer valid. In order to enlarge the operating range
of the model, it is important to take into account the nonlinearities in the modeling tasks. The obtained
models are more accurate than linear ones but are obviously also harder to deal with. Indeed, due to this
complexity, no unified results for nonlinear system fault diagnosis or fault tolerant control are available
so far. Consequently, it leads to work on specific model classes, for example, Lipschitz systems [45],
switched systems [46], LPV systems, bilinear systems, etc.
Among the several classes of nonlinear systems, Takagi-Sugeno (T-S) models have been introduced
in [38]. Roughly speaking, a T-S model is made up of a set of linear sub-models and an interpolation
mechanism based on nonlinear weighting functions. The interest of this structure is the property of
“universal approximator”. Any nonlinear behavior can be then approximated with a given accuracy with
a T-S model. A second important property of this type of models is the convex sum property of the
weighting functions which allows to extend some of tools and methods developed for linear systems.
The T-S models have been extensively studied in the last decades. Modeling and identification are
treated in [8, 31, 30]. The principal methods to obtain a T-S model are the linearization of the system
trajectory around different operating points and the use of optimization techniques to minimize the iden-
tification error. Secondly, for more complex systems, a nonlinear analytic model is often difficult to
elaborate, so the black box approach has been used in order to identify the system parameters by differ-
ent optimization methods. Finally, if an analytical model exists, the sector nonlinearity approach can be
used [42, 43]. The interest of this last method is that the obtained model exactly represents the original
nonlinear model. This model may be difficult to study due to the dependence of the weighting functions
on the system state which is often not fully measurable. Nevertheless an adequate choice of the model
rewriting can be made in order to ease its use for control or diagnosis [26, 27]. In order to reduce the
complexity of T-S models, some works are undertaken recently leading to a reduced order model which
approximates a nonlinear T-S model, in discrete-time domain, by minimizing anH∞ criterion [22].
Stability analysis and stabilization of nonlinear T-S systems are studied in [43, 42, 41, 5, 21, 12, 9],
where different approaches are used. Among these approaches, one can cite the use of the Lyapunov the-
ory and the formulation of the stability conditions in terms of linear matrix inequalities (LMI). Quadratic
stability, where a common Lyapunov matrix is sought, has been studied in [42] but it may be too con-
servative to obtain a numerical solution. Then, the polyquadratic and the non-quadratic approaches have
been developed in [40, 19]. These approaches are extended in [1, 2, 3, 47, 13, 16, 37] to state and
unknown input observer design and filter design. These observers are then used for fault diagnosis in
[6, 13, 23, 2, 48, 28, 14].
Several techniques for fault detection and diagnosis have been proposed in the literature (for more
details, the reader can refer to the books [11, 17, 7]). In the domain of T-S systems, some approaches
are generalized from linear domain. In [6] (resp. [13]), diagnosis for T-S systems is dealt with but only
2

actuator (resp. sensor) fault was considered and the system output was linear. Similar results as those
presented in this paper were established in [36] for linear systems with structured uncertainties using
the standardH∞ approach. In the present paper, both actuator and sensor faults are considered and the
system output is nonlinear with regard to the state and the exogenous signals. In [23, 28], both sensor and
actuator faults are envisaged, but the residual response is not designed in order to match a prescribed one.
The shaping of the residual response is treated in [35, 24] for linear systems. In [48], A similar problem
is aimed in the discrete time case in stochastic framework, for systems with intermittent measurements.
Here the residual response shaping is proposed for continuous time nonlinear systems.
In this paper, a robust residual generator is proposed in order to achieve the tasks of fault detection,
isolation and estimation. The main objective is to extend the method of fault diagnosis based onH∞
control framework, developed for linear systems in [36, 35, 24] including a reference model shaping the
residual signals in order to enhance fault detection, isolation and estimation [24]. First, the problem of
disturbance attenuation and fault influence maximization is reduced to a matching problem. The residual
generator is built to provide a response to the fault that matches the output of a reference model virtually
fed with the fault signal. This reference model corresponds to the desired response of the residual to the
fault. The matching is quantified by theL2-gain from the exogenous signals to the difference between
the residual and the output of the reference model. In other words, the objective of this work is to provide
a residual generator delivering signals which are sensitive to an occurring fault and insensitive to other
faults and perturbations, so, each residual signal detects one fault, thus, the structured residual vector
provides fault detection and isolation. The minimization of thisL2-gain can be recast in an optimization
problem under LMI constraints and solved with dedicated software. The detection, isolation and estima-
tion are performed in a unified way by an adequate choice of the reference model. The general case is
considered and a particular attention is made for the case of rank condition deficiency which is true in
actuator and sensor fault diagnosis because the fault distribution matrices are not full column rank).
This paper is organized as follows. The second section is dedicated to the problem statement; some
notations are also introduced. The main result is given in the third section and a particular case of actuator
and sensor faults where the distribution fault matrix of the output equation is not full column rank is
treated. Two examples are given to illustrate and to discuss the effectiveness of the proposed strategy
for fault diagnosis. In the fifth section, the conservatism of the previously proposed LMI conditions is
reduced with the help of the Polya’s theorem. This conservatism reduction is illustrated by a numerical
example. The last section is devoted to some conclusions and future works.
3

2 Problem statement
Nonlinear systems are generally modeled in the following form:
x(t) = f (x(t),u(t))
y(t) = h(x(t),u(t))(1)
wherex(t) ∈ IRn is the state vector,u(t) ∈ IRnu is the control input andy(t) ∈ IRny represents the system
output vector. The functionsf andh are generally nonlinear. This mathematical model can represent any
nonlinear behavior but its main disadvantage is its complexity and therefore it is not always adapted to
design a controller or an observer. As explained in the previous section, the T-S formalism is suitable for
observer and/or controller design for nonlinear systems.
Using identification, linearization, or the so-called sector nonlinearity transformation, a T-S model
for the model (1) may be obtained under the form:
x(t) =r∑
i=1µi(ξ (t)) (Aix(t)+Biu(t))
y(t) =r∑
i=1µi(ξ (t)) (Cix(t)+Diu(t))
(2)
whereAi ∈ IRn×n, Bi ∈ IRn×nu, Ci ∈ IRny×n, Di ∈ IRny×nu. The weighing functionsµi are nonlinear and
depend on the decision variableξ (t) which can be measurable likeu(t) or y(t) or not measurable like
the system statex(t). It can also be an external signal. The weighting functions satisfy the following
so-called convex sum property:
0≤ µi(ξ (t))≤ 1, ∀t, ∀i = 1, . . . , rr∑
i=1µi(ξ (t)) = 1, ∀t
(3)
The multiple model structure is known to be a universal approximator since it can represent, with a given
accuracy, any nonlinear behavior according to an adequate numberr of submodels (chap 14 of [43]).
Moreover, the multiple model structure provides a mean to generalize the tools developed for linear
systems to nonlinear systems due to the properties (3) and to the linearity of the submodels.
In this paper, the objective is to design a robust residual generator for nonlinear systems in order to
detect, and under specific hypothesis, to isolate the faults affecting a system. Thus, the study is dedicated
to the problem of fault detection, isolation and estimation for nonlinear systems described by continuous-
time T-S models. Besides the faultsf (t) affecting the system, it may also be subject to disturbancesd(t),
thus the system is now modified as follows:
x(t) =r∑
i=1µi(ξ (t)) (Aix(t)+Biu(t)+Eid(t)+Fi f (t))
y(t) =r∑
i=1µi(ξ (t)) (Cix(t)+Diu(t)+Gid(t)+Ri f (t))
(4)
4

whereEi ∈ IRn×nd , Fi ∈ IRn×nf andGi ∈ IRny×nd, andRi ∈ IRny×nf . In the following, the decision variable
ξ (t) is assumed to be measurable. With this representation, it should be noted that both the fault and the
disturbance affect the dynamic equation of the system as well as the measurement equation. However,
depending on the structures of the matricesFi andRi it is possible to consider specific faults affecting the
dynamic part and others affecting only the static part. This could be easily obtained when some columns
of the previous matrices are filled up with null elements.
The input signalsf (t) andd(t) belong toL2 set. TheL2-norm ofu(t) ∈ L2 is given by
‖u(t)‖2 =
+∞∫
0
uT(t)u(t)dt
1/2
(5)
Given the system (4) affected by a fault and a disturbance, the diagnosis task consists in generating a
signal, namely a residual, that is mainly affected by the fault and thus can be used as a fault indicator. This
residual should be made as sensitive as possible to the fault while insensitive to the disturbance in order
that the fault diagnosis is robust. Ideally, in multiple faults case, the residual vector should be structured
to allow fault isolation. This later point can be addressed if the transfer from the fault to the residual
matches a desired response. In fact residual generation can be viewed asL2-control, since the residual
generator is designed by minimizing theL2-gain from the exogenous signals (fault and disturbance) to
the error between the desired and the obtained responses of the residual signal.
3 Residual generator design
The residual generator design for nonlinear systems described by a Takagi-Sugeno model is addressed
in this section. When synthesizing a residual generator, particular detection performances are desired.
A natural way for that is to define these performances using a reference model describing the desired
behavior of the residuals in regard to the faults.
Let consider the T-S nonlinear system subject to disturbances, sensor and actuator faults modeled by
(4). An observer-based residual generator is proposed in the following form where the residual is defined
by a linear combination of the output estimation errors
˙x(t) =r∑
i=1µi(ξ (t))(Ai x(t)+Biu(t)+Li(y(t)− y(t)))
y(t) =r∑
i=1µi(ξ (t))(Ci x(t)+Diu(t))
r(t) = M(y(t)− y(t))
(6)
wherex(t)∈ IRn is the estimated state vector andr(t)∈ IRnr is the residual signal. The matricesLi ∈ IRn×ny
andM ∈ IRnr×ny are the residual generator gains. Since the measurementy(t) in (4) is sensitive to the
fault and the disturbance, it is clear that the residual is also sensitive to these quantities. Thus, in order
to detect the fault despite the presence of the disturbance, the objective is to design the gainsLi andM
5

in order to minimize the transfer from the disturbancesd(t) and to maximize the transfer from the faults
f (t) to the residual signalr(t). Let us define the state estimation errore(t) = x(t)− x(t). Its dynamics is
deduced from (4) and (6) as follows
e(t) = Aξξ e(t)+Eξξ d(t)+Fξξ f (t)
r(t) =Cξ e(t)+Gξ d(t)+Rξ f (t)(7)
where:
Aξξ =r
∑i=1
r
∑j=1
µi(ξ )µ j(ξ )(Ai −LiCj) (8)
Eξξ =r
∑i=1
r
∑j=1
µi(ξ )µ j(ξ )(Ei −LiG j) (9)
Fξξ =r
∑i=1
r
∑j=1
µi(ξ )µ j(ξ )(Fi −LiRj) (10)
Cξ =r
∑i=1
µi(ξ )MCi (11)
Gξ =r
∑i=1
µi(ξ )MGi (12)
Rξ =r
∑i=1
µi(ξ )MRi (13)
Thus, with (7), an explicit expression of the residualr(t) depending only on the faultf (t) and the
disturbanced(t) is obtained.
u(t)
d(t)
f (t)
y(t)
r(t)
System
Residual
generator
−
+Wref
re(t)
Figure 1: Scheme of robust residual generation
The problem of simultaneously minimizing the effect of the disturbances and maximizing the effect
of the fault on the residual can be reduced to a single problem by introducing a transfer functionWre f cor-
responding to the desired transfer from the faultf (t) to the residualr(t). Then robust residual generator
(RRG) reduces to minimize the influence of exogenous signals (d(t), f (t)) on the difference between the
6

desired and the obtained residual, denotedre(t), defined by
re(s) = r(s)−Wre f (s) f (s) (14)
which turns to be anL2-control problem (that is a generalization of theH∞-control problem to the non-
linear case).
In other words, ifre(t) is minimized, thenr(t) will reflect the presence of the faultf (t) as described
byWre f . Obviously, f (t) is not accessible and the filterWre f cannot be implemented on the faulty system:
the robust residual generation presented as a control scheme (as can be viewed on figure 1) is only used
for the design of RRG. Once the RRG is computed, it is implemented as described by (6), where it is only
fed with the measured signalsu(t), y(t) and the known decision variableξ (t). As explained in [35] the
FDI problem depends on the selected structure of the transfer matrixWre f . Indeed, the fault estimation
problem is obtained whennr = nf andWre f = Inf (or at least an invertible matrix) since in that case the
residualr(t) directly follows the fault f (t); the fault detection problem is considered whennr = 1 and
Wre f ∈ IR1×nf (with no null entry) since in that case the single residual is sensitive to all the possible
faults. In addition,Wre f can be chosen as a dynamic system (linear in order to not artificially complicate
the FDI procedure). Consider the transfer matrixWre f = Dre f +C(sI−Are f)−1Bre f , with Dre f ∈ IRnr×nf ,
defined by:
Wre f =
Are f Bre f
Cre f Dre f
(15)
Wre f ∈ S whereS is the set of stable filters having the following property:
∥
∥Wre f∥
∥
−= inf
w∈IR(σ (Wre f( jw)))≥ 1 (16)
(see [24] and [25] for more details). The interest of this kind of filters is that there is no attenuation
of the faults but only an amplification on all frequency ranges (constraint (16)) which may improve the
performances of the fault detection method. The detection, isolation and estimation of the faults can be
obtained by an appropriate choice of the matricesAre f , Bre f , Cre f andDre f . The FDI problem is then
formulated as the following multi-objective optimization problem. Let us denotexre f (t) the state of the
system described by the transfer matrixWre f (15) fed with f (t) (see figure 1).
In order to rewrite the whole model in a state space representation, let us define the augmented state
vectore(t)T = [e(t)T xre f (t)T ]. Using (7) and (15), the virtual residual vectorre(t) (14) is generated by
the system
˙e(t) = Aξξ e(t)+ Eξξ d(t)
re(t) = Cξ e(t)+ Gξ d(t)(17)
7

where the following notations are used
Aξξ =r
∑i=1
r
∑j=1
µi(ξ (t))µ j (ξ (t))
Ai −LiCj 0
0 Are f
(18)
Eξξ =r
∑i=1
r
∑j=1
µi(ξ (t))µ j (ξ (t))
Ei −LiG j Fi −LiRj
0 Bre f
(19)
Cξ =r
∑i=1
µi(ξ (t))(
MCi −Cre f
)
(20)
Gξ =r
∑i=1
µi(ξ (t))(
MGi MRi −Dre f
)
(21)
e(t) =
e(t)
xre f (t)
(22)
d(t) =
d(t)
f (t)
(23)
The objective is now to obtain the gainsLi and M of the observer minimizing the effects of the per-
turbationsd(t) and the faultsf (t) on the virtual residualre(t). That problem leads to solve a standard
L2-control problem whered(t) and f (t) are the exogenous signals andre(t) is the controlled output. The
choice of the filterWre f is important because it allows the shaping of the residual response in order to
achieve the fault isolation and estimation.
Theorem 1 states the robust fault detection, isolation and estimation as a minimization problem under
LMI constraints allowing to design the residual generator (6) and to give a bound of the transfer from
(d(t)T f (t)T)T to re(t).
Theorem 1. The robust residual generator(6) exists if there exists symmetric and positive definite matri-
ces P1 and P2, matrices Ki and M and a positive scalarγ solving the following optimization problem:
minP1,P2,Ki ,M
γ (24)
under the following LMI constraints
Xii < 0, i = 1, ..., r2
r−1Xii +Xi j +Xji < 0, i, j = 1, ..., r, i 6= j(25)
8

where, for(i, j) ∈ 1, . . . , r, Xi j andΦi j are defined by
Xi j =
Φi j 0 P1Ei −KiG j P1Fi −KiRj CTi MT
∗ ATre fP2+P2Are f 0 P2Bre f −CT
re f
∗ ∗ −γ I 0 GTi MT
∗ ∗ ∗ −γ I RTi MT −DT
re f
∗ ∗ ∗ ∗ −γ I
(26)
Φi j =ATi P1+P1Ai −CT
j KTi −KiCj (27)
The residual generator gains Li are obtained by:
Li = P−11 Ki (28)
and M is obtained directly. The attenuation level of exogenous signals on residuals is given byγ .
Proof. Using the bounded real lemma (BRL) [4], the stability of the system (17) is ensured whend(t) = 0
and theL2-gain of the transfer fromd(t) to re(t) is bounded byγ if the following condition is satisfied
ATξξ P+PAξξ PEξξ CT
ξ
∗ −γ I GTξ
∗ ∗ −γ I
< 0 (29)
In order to obtain a more explicit inequality in terms of the gain matricesLi andM, the matrixP is chosen
in block diagonal form as follows:
P=
P1 0
0 P2
(30)
The definitions (18-21) and the chosen matrixP (30) allow to derive from (29) the following inequality
Xξξ =r
∑i=1
r
∑j=1
µi(ξ (t))µ j (ξ (t))Xi j < 0 (31)
where:
Xi j =
Φi j 0 P1Ei −P1LiG j P1Fi −P1LiRj CTi MT
∗ ATre fP2+P2Are f 0 P2Bre f −CT
re f
∗ ∗ −γ I 0 GTi MT
∗ ∗ ∗ −γ I RTi MT −DT
re f
∗ ∗ ∗ ∗ −γ I
(32)
and the nonlinear functionsµi(ξ (t)) satisfy the convex sum property (3) andXξξ defined by (31). As
9

established in [44], the inequality (31) holds if
Xii < 0, i = 1, ..., r2
r−1Xii +Xi j +Xji < 0, i, j = 1, ..., r, i 6= j(33)
Applying this result and using the change of variableKi = P1Li, the inequality (31) holds if inequalities
(25) with the definitions (26)-(27) are satisfied. Notice that (25) are expressed in LMI formulation re-
garding toP1,P2,Ki andM. Finally, an optimal residual generator is obtained by minimizingγ in order to
minimize the effect ofd(t) on the virtual residualre(t).
4 Robust fault diagnosis
Due to the presence of exogenous disturbances, the residual signals are different from zero even in the
fault-free case. In the framework of fault detection, a threshold,Jth, is generated in a fault-free situation.
A fault detection alarm is generated by comparison between each componentr i(t) of the residual signal
r(t) and the threshold:
|r i(t)|< Jth ⇒ no fault
|r i(t)|> Jth ⇒ fault(34)
In order to improve the fault detection and isolation, a residual generator can be constructed for each
fault. Each residual generator is designed to minimize the transfer from(d(t)T f (t)T)T to re,i(t) =
r i(t)−Wre f,i fi(t), i = 1, ...,nf , fi(t) being theith component of the vectorf (t) andWre f,i a specific filter
corresponding to the desired transfer from the faultfi(t) to the residualr i(t).
As previously mentioned, it is often considered that the fault vectorf (t) may have two origins, the
first one denotedfa(t) represents the fault vector affecting only the actuators, which appears in the state
equation. The second component denotedfs(t) is the fault vector affecting only the sensors. The output
of the system is still given by the second equation of (4) but, in that case, the fault incidence matrices
have the following particular structures
Fi =(
F1i 0
)
, Ri =(
0 R1i
)
(35)
according to the decomposition off (t) = ( f Ta (t) f T
s (t))T . As explained in [35] and [24], if the matrices
Ri defined by (35) (fori ∈ 1, . . . , r) are not full column rank, this will have an adverse effect on the
minimal values ofγ . It is well known in theH∞-control framework that the obtainableγ is at least equal
to the maximal singular value of the direct transfer from the exogenous signal to the controlled output,
namelyGξ defined in (21). From (21), it can be seen that ifDre f is not null,Ri is useful to minimize the
maximal singular value ofGξ . As a consequence, column rank deficiency of theRi matrices will result
in limited performances of the residual generator, quantified by the minimum obtainable value ofγ .
When the actuator faultfa(t) does not affect the output equation of the system, we haveRi =(
0 R1i
)
10

and clearly these matrices are not full column rank. In a first approach, in order to avoid this problem, a
perturbation-like termR0i fa(t) is added on the output equation as follows:
y(t) =r
∑i=1
µi(ξ )
Cix+Diu+Gid+(
R0i R1
i
)
fa(t)
fs(t)
(36)
whereR0i are the distribution matrices of the actuator faultfa(t) in the output equation and are chosen as
small as possible. Notice that in the context of fault isolation, the introduction of the termR0i fa(t) may
generate false alarms. To improve the isolation results, we propose to add and subtract the perturbation-
like term. As a consequence, the matrices(
R0i R1
i
)
are guaranteed to be full column rank (if dim(y) ≥
dim( f ) which is a usual condition). The subtracted term is considered as a perturbation which influence
is to be minimized. For that purpose, (36) is rewritten as
y(t) =r
∑i=1
µi(ξ )
Cix+Diu+ Gid+ Ri
fa(t)
fs(t)
(37)
where
Gi =(
Gi bR0i
)
, Ri =(
R0i R1
i
)
, d(t) =
d(t)
−fa(t)
b
(38)
whereb is a positive real parameter. Using this second approach, the residual generator is constructed as
explain in section 3 and the thresholdJth is calculated by using the bound of the new perturbation vector
d(t); thus the fault isolation is improved.
5 Relaxed conditions for residual generator design using Polya’s theorem
The proposed result may be conservative in the sense that it is derived from the use of a common Lya-
punov matrixP that satisfies ther2 LMIs (25). Then, solving the optimization problem given in the
previous theorem under the LMI constraints may fail to provide a solution. Recently, in [34, 29], a new
interesting method to reduce the conservativeness of the matrix summations inequality has been proposed
to study the stability of a matrix polytope with the use of Polya’s theorem. The obtained conditions are
sufficient and asymptotically necessary. The Polya’s theorem is used, in this section, in order to derive
less conservative LMI conditions.
Due to the convex sum property (3), it is obvious that for any positive integerp, the inequality (31) is
equivalent to(
r
∑k=1
µk(ξ (t))
)p r
∑i=1
r
∑j=1
µi(ξ (t))µ j(ξ (t))Xi j < 0 (39)
In order to write the multi-dimensional summations (39) in a compact form, let us consider the notations
used in [34]:
Ip =
i = (i1, i2, ..., ip) ∈ NP∣
∣1≤ i j ≤ r ∀ j = 1,2, ..., p
(40)
11

∑i∈Ip
µi =r
∑i1
r
∑i2
...r
∑ip
µi1µi2...µip (41)
wherei represents a multi-dimensional multi-index, and:
µi =p
∏ℓ=1
µiℓ = µi1µi2...µip, i ∈ Ip (42)
is a multi-dimensional fuzzy summations. Let us defineP(i) ⊂ Ip the set of permutations of the multi-
index i. For example, if:
i = (1,1,2,2) (43)
then, the permutations setP(i) is given by:
P(i) = (1,1,2,2) ,(1,2,1,2) ,(2,1,1,2) ,(2,1,2,1) ,(2,2,1,1) (44)
If:
j ∈ P(i)⇒ µj = µi (45)
these permutations allows to group elements which share the samei, for instance:
µ(1,1,3,4) = µ21µ3µ4 = µ(1,3,1,4) = µ(3,1,1,4) = µ(3,1,4,1) = ... (46)
Using the first result given in [34] in order to solve the problem of state estimation and residual generator
addressed in section 3, less conservative sufficient conditions for the negativity ofXξξ , defined by
Xξξ =r
∑i=1
r
∑j=1
µi(ξ (t))µ j (ξ (t))Xi j (47)
are derived from the lemma 1 [34].
Lemma 1. For any functionsµi satisfying(3) and any integer p∈ N, the matrix Xξξ (47) is negative
definite if
∑j∈P(i)
Xj1 j2 < 0, ∀i ∈ Ip (48)
As a particular case, settingp = 0, the problem reduces to theorem 1. It can be shown that the
solution of this problem for a given valuep0 of p is always solution of the problem withp> p0, implying
conservatism reduction.
12

5.1 Example
Let us consider a simple example wherer = 2, then the system (7) is stable ifXξξ < 0 which is equivalent
to (39). Settingp= 1, a triple summation is obtained, and the inequalityXξξ < 0 is equivalent to:
r
∑i1
r
∑i2
r
∑i3
µi1µi2µi3Xi1i2 < 0⇔ ∑i∈P(i)
µiXi1i2 < 0 (49)
wherei = (i1, i2, i3) andi1, i2, i3 = 1, ...,2.
• For i = (1,1,1), it follows: X11 < 0
• For i = (1,1,2), three permutations are possible:X11+X12+X21< 0
• For i = (1,2,2), three permutations are possible:X22+X21+X12< 0
• For i = (2,2,2), it follows: X22 < 0
In order to reduce the conservatism of the result in theorem 1, the Polya’s theorem is applied directly
on the inequality (31), with the changes of variablesKi = P1Li, for a suitable value ofp. Note that the
obtained conditions are only sufficient for guaranteeing the negativity of (31) and as explained in [34], if
p→ ∞ asymptotic necessary and sufficient conditions are obtained, but the number of LMI constraints
can drastically increase. Applying the Polya’s theorem approach as used in [34] to the residual generator
conditions detailed in theorem 1, the following result can be stated.
Theorem 2. The robust residual generator(6) exists if there exists symmetric and positive definite matri-
ces P1 and P2, matrices Ki and M and a positive scalarγ solution to the following optimization problem:
minP1,P2,Ki ,M
γ (50)
under the constraints:
∑j∈P(i)
Xj1 j2 < 0, ∀i ∈ Ip (51)
where Xj1 j2 is defined by(26) and j1, j2 belong toP(i)⊂ Ip whereP(i) is the set of all permutations of
the multi-indexi. The gains of the observer are given by Li = P−11 Ki and the attenuation level isγ .
Using the Polya’s theorem and settingp= 3, the following theorem 3 is obtained.
Theorem 3. The robust residual generator(6) exists if there exists symmetric and positive definite matri-
ces P1 and P2, matrices Ki and M and a positive scalarγ solution to the following optimization problem:
minP1,P2,Ki ,M
γ , s.t (52)
13

Xii < 0
i = 1, ..., r
3Xii +Xi j +Xji < 0
i, j = 1, ..., r, i 6= j
3Xii +Xj j +3Xi j +3Xji < 0
i, j = 1, ..., r, i 6= j
6Xii +3Xi j +3Xik +3Xji +3Xki +Xjk +Xk j < 0
i, j,k= 1, ..., r, i < j < k
3Xii +3Xj j +6Xi j +6Xji +3Xik +3Xki +3Xjk +3Xk j < 0
i, j,k= 1, ..., r, i < j < k
3Xii +3Xj j +6Xi j +6Xji +3Xik +3Xki +3Xjk +3Xk j < 0
i, j,k= 1, ..., r, i < j < k
6Xii +6Xi j +6Xji +6Xik +6Xki +6Xil +6Xli +3Xjk +3Xk j +3Xjl +3Xl j +3Xkl +3Xlk < 0
i, j,k= 1, ..., r, i < j < k< l
6(Xi j +Xji +Xik +Xki+Xil +Xli +Xim+Xmi+Xjk
+Xk j +Xjl +Xl j +Xjm+Xm j+Xkl +Xlk +Xkm+Xmk)< 0
i, j,k, l ,m= 1, ..., r, i < j < k< l < m
where Xi j is defined in(26). The gains of the observer are given by Li = P−11 Ki and the attenuation level
is γ .
Proof. According to theorem 1, the solution of the RRG problem is obtained by minimizingγ under the
constraint∑ri=1 ∑r
j=i µi(ξ (t))µ j (ξ (t))Xi j < 0, which due to the convex property of the weighting functions
is equivalent to(
r
∑k=1
µk(ξ (t))
)p r
∑i=1
r
∑j=i
µi(ξ (t))µ j (ξ (t))Xi j < 0 (53)
In the following, for the sake of clarity, the termξ (t) is omitted. Settingp= 3 and gathering the terms
14

sharing the same combinations of weighting functions, it follows
(
r
∑i=1
µi
)3 r
∑i=1
r
∑j=1
µiµ jXi j =r
∑i=1
µ5i Xii +
r
∑i, j=1i 6= j
µ4i µ j (3Xii +Xi j +Xji)
+r
∑i, j=1i 6= j
µ3i µ2
j Xi j +r
∑i=1
r
∑j=1i< j
r
∑k=1j<k
µ3i µ j µkXi jk +
r
∑i=1
r
∑j=1i< j
r
∑k=1j<k
µ2i µ2
j µkX∗i jk
+r
∑i=1
r
∑j=1i< j
r
∑k=1j<k
r
∑l=1k<l
µ2i µ j µkµl Xi jkl +
r
∑i=1
r
∑j=1i< j
r
∑k=1j<k
r
∑l=1k<l
r
∑m=1l<m
µiµ j µkµl µmXi jklm < 0 (54)
with
Xi j =3Xii +Xj j +3Xi j +3Xji
Xi jk =6Xii +3(Xi j +Xji +Xik +Xki)+Xjk +Xk j
X∗i jk =3Xii +3Xj j +6Xi j +6Xji +3Xik +3Xki +3Xjk +3Xk j
Xi jkl =6(Xii +Xi j +Xji +Xik +Xki+Xil +Xli )+3(Xjk +Xk j +Xjl +Xl j +Xkl +Xlk)
Xi jklm =6(Xi j +Xji +Xik +Xki +Xil +Xli +Xim+Xmi+Xjk
+Xk j +Xjl +Xl j +Xjm+Xm j+Xkl +Xlk +Xkm+Xmk)
what allows to find the constraints listed in theorem 3, which ends the proof.
6 Illustrative example 1
The proposed algorithm of robust diagnosis is illustrated by an academic example. Let us consider the
nonlinear system (4) defined by
A1 =
−1 4 1
1 −3 0
−2 1 −10
, A2 =
−3 1 −2
6 −3 0
1 2 −4
, B1 =
1
5
0.5
, B2 =
3
1
−1
,
E1 =
0.5
1
1
, E2 =
1
0.3
0.5
, F1 =
0 2
0 1
0 1
, F2 =
0 1
0 3
0 1
,
and
C1 =
1 1 1
0 0 1
, C2 =
1 1 0
1 0 1
, G1 = G2 =
0.5
1
, R1 = R2 =
1 0
3 0
15

The weighting functionsµi are defined as follows:
µ1(u(t)) =1− tanh((u(t)−1)/10)
2µ2(u(t)) = 1−µ1(u(t))
(55)
Considering the structure of the matricesEi andGi , the disturbance input vectord(t) affects the outputs of
the system and its dynamic. In the other hand, considering the structure ofFi andRi, the first component
of the vectorf (t) is a sensor fault and the second component is an actuator fault defined by:
f1(t) = fs(t) =
1, if 10 ≤ t ≤ 16
0, else(56)
f2(t) = fa(t) =
1, if 4 ≤ t ≤ 8
0, else(57)
The initial conditions of the state of the system and those of the residual generators are the same:x(0) =
x(0) = [2 −2 −1]T .
6.1 Fault detection and isolation
The problem of residual generation is stated as designing a set of filters that furnish residuals such that
each residual is devoted to detect a particular fault or a particular set of faults. A bank of three residual
generators is designed (see figure 2) in order to illustrate the effectiveness of the proposed approach in
fault detection and fault isolation. Since a system with two measured outputs is considered, the fault
isolation may be obtained with two generators where each one is dedicated to a specific fault, or with
a single generator delivering a residual vector such that each of its entries corresponds to one of the
two faults. The first and the second generatorsRG1 andRG2 are dedicated to the isolation of sensor
fault and actuator fault respectively, while the third oneRG3 is built to detect simultaneously both faults.
A comparison between the performances of a global residual generatorRG3 and the bank of residual
generatorRG1 andRG2 will be given. The three generators have dynamic characteristics fixed by the
blockAire f of the transfer matrixWi
re f . The problem of fault isolation is performed by residual structuring,
i.e. choosing adequate values of the blockWre f to make the residual generator sensitive or insensitive to
a specific fault.
• The first residual generator is designed with a stable filterWre f (15) defined by
W1re f =
−120 1 0
1 1 0
(58)
The aim of this choice is to generate a reference signal corresponding to the (low-pass filtered)
16

u(t)
d(t) f (t)
y(t)System
+−
+ −
+ −
RG2
RG1
RG3
r1(t)
r2(t)
r3(t)
r3
e(t)
r2
e(t)
r1
e(t)
W3
ref
W1
ref
W2
ref
Figure 2: Scheme of robust residual generation
sensor fault. Indeed, with this filterW1re f , the residual generator 1 generates the residualr1(t) which
will be sensitive to the first fault (sensor fault) and insensitive to the second one (actuator fault).
After solving the optimization problem of theorem 1 under LMI constraints (25), the obtained
attenuation level isγ1 = 0.5306. The threshold isJth = 0.3. The simulation results are depicted
in the figure 3. The residualr1(t) clearly allows the detection of the sensor fault and is quite
insensitive to the actuator fault (occurring betweent = 4 andt = 8).
0 2 4 6 8 10 12 14 16 18 20−0.5
0
0.5
1
1.5
2
time
Sensor faultResidual detecting the sensor faultthreshold
Figure 3: Residual generator 1 : Sensor fault detection
• The second residual generator is performed with
W2re f =
−90 0 1
1 0 1
(59)
It is sensitive to the actuator fault and insensitive to the sensor fault. As explained in the previous
section, the matrixR is not full column rank. By following the proposed strategy to solve this
problem withR0i = 0.8 andb= 1 a solution is obtained to the optimization problem given in the
17
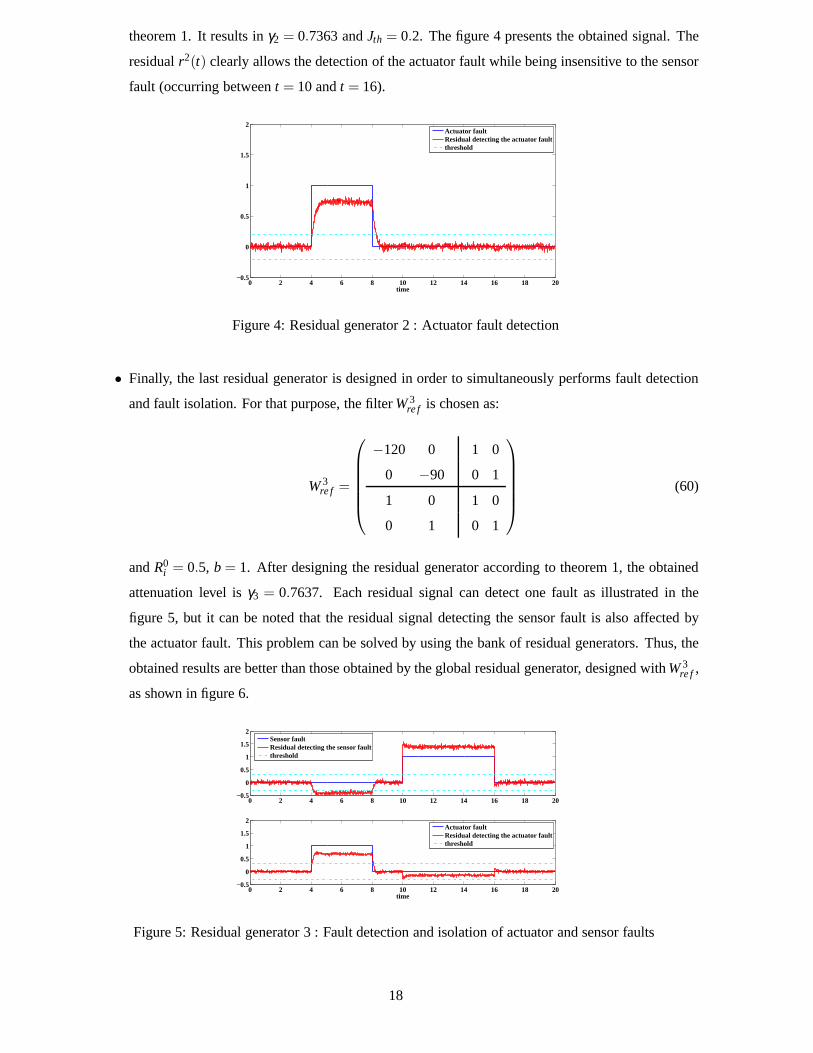
theorem 1. It results inγ2 = 0.7363 andJth = 0.2. The figure 4 presents the obtained signal. The
residualr2(t) clearly allows the detection of the actuator fault while being insensitive to the sensor
fault (occurring betweent = 10 andt = 16).
0 2 4 6 8 10 12 14 16 18 20−0.5
0
0.5
1
1.5
2
time
Actuator faultResidual detecting the actuator faultthreshold
Figure 4: Residual generator 2 : Actuator fault detection
• Finally, the last residual generator is designed in order to simultaneously performs fault detection
and fault isolation. For that purpose, the filterW3re f is chosen as:
W3re f =
−120 0 1 0
0 −90 0 1
1 0 1 0
0 1 0 1
(60)
andR0i = 0.5, b= 1. After designing the residual generator according to theorem 1, the obtained
attenuation level isγ3 = 0.7637. Each residual signal can detect one fault as illustrated in the
figure 5, but it can be noted that the residual signal detecting the sensor fault is also affected by
the actuator fault. This problem can be solved by using the bank of residual generators. Thus, the
obtained results are better than those obtained by the global residual generator, designed withW3re f ,
as shown in figure 6.
0 2 4 6 8 10 12 14 16 18 20−0.5
0
0.5
1
1.5
2
Sensor faultResidual detecting the sensor faultthreshold
0 2 4 6 8 10 12 14 16 18 20−0.5
0
0.5
1
1.5
2
time
Actuator faultResidual detecting the actuator faultthreshold
Figure 5: Residual generator 3 : Fault detection and isolation of actuator and sensor faults
18

0 2 4 6 8 10 12 14 16 18 20−0.5
0
0.5
1
1.5
2
Sensor faultResidual detecting the sensor faultthreshold
0 2 4 6 8 10 12 14 16 18 20−0.5
0
0.5
1
1.5
2
time
Actuator faultResidual detecting the actuator faultthreshold
Figure 6: Residual generators 1 and 2 : Fault detection and isolation of actuator and sensor faults
It can be mentioned that the dedicated RRG allow to obtain lowerL2-gains (i.e.max(γ1,γ2)≤ γ3)
by splitting the transfer matching constraints into two different problems.
• Now, assume that the faultsfs(t) and fa(t) may appear simultaneously (fort ∈ [6 16] andt ∈ [4 10]
respectively). With the same parametersW3re f , R0
i andb used previously, the simulation results are
given in the figure 7. It can be seen that the third residual generator is able to detect and isolate
simultaneous occurring faults.
0 2 4 6 8 10 12 14 16 18 20−0.5
0
0.5
1
1.5
2
Sensor fault Residual detecting the sensor fault threshold
0 2 4 6 8 10 12 14 16 18 20−0.5
0
0.5
1
1.5
2
time
Actuator fault Residual detecting the actuator fault threshold
Figure 7: Residual generator 3 : Simultaneous actuator and sensor fault detection and isolation
In order to illustrate the enhancement offered by the relaxed conditions using Polya’s theorem, in
figure 8 the real faultsfa(t) and fs(t) are represented by blue lines, while the residuals obtained by the
approach in theorem 1 are depicted in black lines and the approach using Polya’s theorem withp = 3
gives residuals illustrated by red lines. It is clear that Polya’s theorem provides more accurate results. It
is due to the fact that the attenuation levels for each residual generator are less than those obtained using
the method proposed in theorem 1.
6.2 Fault estimation
Another simulation is run in order to illustrate the fault estimation of both actuator and sensor faults
with the bank of residual generatorsRG1 and RG2. To do that, let us consider the parameterWre f =
19

0 2 4 6 8 10 12 14 16 18 20−0.5
0
0.5
1
1.5
2
0 2 4 6 8 10 12 14 16 18 20−0.5
0
0.5
1
1.5
2
time
Figure 8: Residual generator comparison : approach of theorem 1 (black) and Polya’s theorem approach(red)
I2×2 (an identity matrix). With the parametersR0i = 0.5 andb = 1, the solution of the optimization
problem provides the attenuation levelγ1 = 0.5548 for the first residual generator andγ2 = 0.7133 for the
second residual generator. The simulation results are displayed in the figure 9. It can be noticed that the
estimation of the faults are acceptable for both actuator and sensor.
0 2 4 6 8 10 12 14 16 18 20−2
−1
0
1
2
0 2 4 6 8 10 12 14 16 18 20
−1
−0.5
0
0.5
1
time
Actuator fault Residual estimating the actuator fault
Sensor fault Residual estimating the sensor fault
Figure 9: Actuator and sensor fault estimation
Remark 1. In order to enhance the residual generator robustness with regard to disturbances d(t), it is
possible to introduce a nd order stable weighting transfer function Wdre f as shown in the figure 10. This
transfer function can take into account a possible knowledge on the frequency range distribution of the
disturbance d(t). The procedure is the same as that used for fault detection and isolation by including
the reference filter Wre f . Then the goal is to design the residual generator in order to make each residual
signal as sensitive as possible to a particular fault or set of faults and as insensitive as possible to the
disturbances d(t) in the considered frequency range.
7 Illustrative example 2
In this second example, an application of the proposed fault diagnosis algorithm is illustrated by a flexible
one link robot represented in the figure 11. The model of this system is described by the following
equations borrowed from [33]
20

u(t)
d(t)
f (t)
y(t)
r(t)
System
Residual
generator
−
+
W dref
Wfref
re(t)
Figure 10: Scheme of robust residual generation
Figure 11: Flexible one link robot
θm(t) = ωm(t)
ωm(t) =k
Jm(θl (t)−θm(t))−
BJm
ωm(t)+KτJm
u(t)
θl (t) = ωl (t)
ωl (t) =−kJl(θl (t)−θm(t))−
mghJl
sin(θl (t))
(61)
whereθm(t) andωm(t) denote the angular position and velocity of the motor.θl (t) and ωl (t) are the
angular position and velocity of the link. The input signal isu(t) = sin(t). Assume that two faultsfa(t)
and fs(t) affect, respectively the state equation of the system and the output equation with respect to
distribution matricesF andR. Furthermore, it is assumed that the system is subject to random perturba-
tion d(t), with maximal magnitude 1, affecting both the state and the output equations. Then, the state
representation of the faulty perturbed system is
x(t) = Ax(t)+φ(x(t))+Bu(t)+F f (t)+Ed(t)
y(t) =Cx(t)+R f(t)+Gd(t)
21

where:
A=
0 1 0 0
−48.6 −1.25 48.6 0
0 0 0 1
19.5 0 −19.5 0
, B=
0
21.6
0
0
, φ(x) =
0
0
0
−3.33sin(x3)
x(t) =
θm(t)
ωm(t)
θl (t)
ωl (t)
, F =
0 0
1 0
1 0
0 0
, E =
0
0.1
0
0
, C=
0 0 1 0
1 0 0 0
, R=
0 0
0 1
,
G=
0.1
0.1
, f (t) =
fa(t)
fs(t)
f (t) is vector containing a first component denotedfa(t) which affects only the state equation and a sec-
ond one denotedfs(t) which is a fault affecting the sensor measuringx1(t). By using a sector nonlinearity
transformation approach [42], a multiple model representation of the system described above is given by
(4) with
A1 =
0 1 0 0
−48.6 −1.25 48.6 0
0 0 0 1
19.5 0 −22.83 0
, A2 =
0 1 0 0
−48.6 −1.25 48.6 0
0 0 0 1
19.5 0 −18.77 0
B1 = B2 = B
µ1(z(t)) =z(t)+0.2172
1.2172
µ2(z(t)) =1−z(t)1.2172
wherez(t) = sin(x3(t))x3(t)
. The results presented in the theorem 1 are used to design a robust residual generator
with the same filter as that used in the first example for fault estimation. In order to overcome the problem
of rank deficiency of the matricesF and R, we choose the parameterR0i = 0.254. After solving the
optimization problem under LMI constraints, the obtained gains of the residual generator are
L1 =
−0.0363 0.0869
4.0080 −0.0633
3.6853 −0.0179
−0.2219 −0.0055
, L2 =
−0.0363 0.0869
3.9603 −0.0563
3.6469 −0.0123
0.0725 −0.0267
, M =
3.4390 −0.0002
−0.9333 0.9983
22

The optimized parameter isγ = 0.6090. The figure 12 illustrates the faultsfa(t) and fs(t) (blue solid lines)
and the corresponding residuals (red dashed lines). In figure 13,fa(t) and fs(t) affecting, respectively,
the state and the output equations are assumed to be time-varying faults (oscillatory signals). It appears
that the residual generator is able to provide satisfactory fault estimates. Furthermore, as shown in figures
12 and 13, in the time interval[30 35], the system is subjected to simultaneous faultsfa(t) and fs(t).
One can clearly observe that the first residual is only sensitive to the faultfa(t) and the second one is
only sensitive tofs(t). This is the result of maximizing of the effect offa(t) (resp. fs(t)) with respect to
the first (resp. second) residual signal when minimizing the effect offs(t) (resp. fa(t)) on that residual
signal.
0 5 10 15 20 25 30 35 40 45 50−0.5
0
0.5
1
1.5
residual detecting the fault fa(t) fault f
a(t)
0 5 10 15 20 25 30 35 40 45 50−0.5
0
0.5
1
1.5
time
residual detecting the fault fs(t) fault f
s(t)
Figure 12: Fault estimation
0 5 10 15 20 25 30 35 40 45 50−2
−1
0
1
2
residual detecting the fault fa(t) fault f
a(t)
0 5 10 15 20 25 30 35 40 45 50−2
−1
0
1
2
time
fault fs(t) residual detecting the fault f
s(t)
Figure 13: Time-varying fault estimation
8 Illustrative example 3
In order to illustrate the relaxation introduced with Polya’s theorem, consider the Takagi-Sugeno system
(4) defined by:
A1 =
1.59 −7.29
0.01 0
, A2 =
−a −4.33
0 0.05
23

B1 =
1
0
, B2 =
0
1
, E1 =
1
3
, E2 =
2
1
F1 =
1
1.5
, F2 =
2
3
, C1 =(
6 0)
, C2 =(
6−b −1)
D1 = D2 = 0, G1 = G2 = 0.5, R1 = 1, R2 = 2
wherea andb are scalar parameters for which different values will be further considered. In this simula-
tion, the focus is made on the relaxation introduced by Poly’a theorem, that is why only one RRG design
is studied, namely the fault estimation case, withWre f = 1. For that purpose, considering the inequality
(31) and using the Polya’s theorem, the following inequalities are obtained with respect to different values
of p (i.e. the number of summations):
• For p= 1
Xii < 0, i = 1,2 (62)
Xii +Xi j +Xji < 0, i, j = 1,2, i 6= j (63)
• For p= 2
Xii < 0, i = 1,2 (64)
2Xii +Xi j +Xji < 0, i, j = 1, 2, i 6= j (65)
Xii +Xj j +2Xi j +2Xji < 0, i, j = 1,2, i < j (66)
• For p= 3
Xii < 0, i = 1,2 (67)
3Xii +Xi j +Xji < 0, i, j = 1,2, i 6= j (68)
3Xii +Xj j +3Xi j +3Xji < 0, i, j = 1,2, i < j (69)
Figure 14, shows the solution set, with the parametersa∈ [8.5,10] andb∈ [5,7], obtained with a classical
approach requiring the negativity of all the termsXi j for all values ofi and j and the solution set obtained
with using Polya’s theorem withp= 1. Note that, in this exampler = 2, then, the LMIs obtained using
Polya’s theorem withp = 1 are the same with those obtained with Tuan’s lemma [44] presented in the
first theorem. It can be concluded from this example that both Polya’s theorem and Tuan’s lemma provide
a less conservative LMI conditions compared to the classic method.
A second simulation of the same example (withr = 2) is performed in order to illustrate that the
Tuan’s relaxation scheme [44] is a special case of Polya’s theorem and to compare the solutions obtained
using Polya’s theorem withp ∈ 1,2,3. For T-S systems with large number of sub-models, Polya’s
theorem provides less conservative LMI conditions due to the fact that in Tuan’s relaxation scheme, the
24

8.5 9 9.5 105
5.2
5.4
5.6
5.8
6
6.2
6.4
6.6
6.8
Figure 14: Solution sets for classical approach (o) and Polya’s theorem withp= 1 (.)
first term in the second inequality of (25) is divided by(r − 1), furthermore, with Polya’s theorem if
there is no solution for a givenp, it could be obtained by increasing the value ofp. The results are
depicted in the figure 15. Note that for some couples of the parametersa andb, the Tuan’s approach
don’t provide a solution but with the approach based on Polya’s theorem, there exist solutions for the
LMI constraints. Indeed, in this example, as can be seen in equations (62)-(69), forp= 1, the number
of LMIs to solve is 4 and forp= 2,3 it becomes 5. The number of variables is the same for eachp (11
scalar variables in this example). If we consider a TS system with 3 sub-models, the number of LMIs for
p= 1 is 9 and forp= 2 is 12 but the number of scalar variables to solve remains the same for allp which
consist, in the case of fault estimation problem, on the components of the matricesP1, Li, M andγ . As
a conclusion, by increasing the parameterp the conservatism decreases. However, the number of LMIs
to solve increases and the number of scalar variables in LMI problems remains the same for allp. With
recent high-performance computers, it is possible to solve a great number of LMIs, this will not be affect
the residual generator since the LMIs are solved offline.
9 Conclusion
This paper is dedicated to the design of residual generators for fault detection, isolation and estimation,
in nonlinear systems described by Takagi-Sugeno models. The main idea is the extension of theL2
formalism developed for nonlinear system control and estimation to the nonlinear robust fault diagnosis.
The residual generator is designed to minimize the sensitivity to the perturbations and to maximize the
sensitivity to the faults. This min/max optimization problem is turned into a simple matching problem by
25

8.5 9 9.5 106.65
6.7
6.75
6.8
Figure 15: Solution sets using Polya’s theorem withp= 1 (o), p= 2 (∗), p= 3 (+)
introducing a reference transfer from the fault to the residual, which can be a constant matrix or a stable
filter. Furthermore, the adequate choice of this reference parameter allows to shape the residual response
to fault and achieves fault detection, fault isolation or fault estimation. By using the bounded real lemma
(BRL) for this residual generator optimization problem the established constraints are expressed in terms
of linear matrix inequalities. The diagnosis procedure is based on the definition of a threshold in the
fault-free situation. An academic example is given in order to illustrate the proposed diagnosis strategies
for actuator and sensor fault detection, isolation and estimation. The second part of this paper deals with
the conservativeness reduction of the first proposed result. Using Polya’s theorem, more relaxed LMI
conditions are then given, allowing to decrease the attenuation level and obtain a more accurate diagnosis.
It can be noticed from the simulation results that the proposed relaxation, significantly improves the
obtained results.
For future works, two issues are envisaged, the first one will deal with the extension of this approach
to nonlinear Takagi-Sugeno systems with unmeasurable premise variables. The second one will concern
the LMI reduction in order to reduce the complexity of the optimization problem. An application of this
residual generator for sensor fault tolerant control scheme has been already published in [15].
26
References
[1] A. Akhenak, M. Chadli, J. Ragot, and D. Maquin. Design of sliding mode unknown input observer
for uncertain Takagi-Sugeno model. In15th Mediterranean Conference on Control and Automation,
MED’07, Athens, Greece, 2007.
[2] A. Akhenak, M. Chadli, J. Ragot, and D. Maquin. Fault detection and isolation using sliding mode
observer for uncertain Takagi-Sugeno fuzzy model. In16th Mediterranean Conference on Control
and Automation, MED’08, Ajaccio, France, 2008.
[3] P. Bergsten, R. Palm, and D. Driankov. Observers for Takagi-Sugeno fuzzy systems.IEEE Trans-
actions on Systems, Man and Cybernetics - Part B: Cybernetics, 32(1):114–121, 2002.
[4] S. Boyd, L. El Ghaoui, E. Feron, and V. Balakrishnan.Linear Matrix Inequalities in System and
Control Theory. SIAM ed., 1994.
[5] M. Chadli, D. Maquin, and J. Ragot. Non quadratic stability analysis of Takagi-Sugeno systems. In
IEEE Conference on Decision and Control, CDC’2002, Las Vegas, Nevada, USA, 2002.
[6] W. Chen, and M. Saif. Design of a TS based fuzzy nonlinear unknown input observer with fault
diagnosis applications. InAmerican Control Conference, ACC’07, New York City, USA, 2007.
[7] S. X. Ding. Model-Based Fault Diagnosis Techniques Design Schemes, Algorithms And Tools.
Springer-Verlag, 2008.
[8] G. Gasso. Identification de systemes dynamiques non lineaires : approche multi-modele. PhD
thesis, Institut National Polytechnique de Lorraine (INPL), Nancy, France, 2000. (in french).
[9] H. Gao, X. Liu, and J. Lam. Stability analysis and stabilization for discrete-time fuzzy systems with
time-varying delay. IEEE Transactions on Systems, Man and Cybernetics - Part B: Cybernetics,
41(1): 273–286, 2011.
[10] Z.F. Gao, B. Jiang, P. Shi, and Y.F. Xu. Fault accommodation for near space vehicle attitude dynam-
ics via T-S fuzzy models.International Journal of Innovative Computing, Information and Control,
6(11): 4843–4856, 2010.
[11] J.J. Gertler.Fault Detection and Diagnosis in Engineering Systems. Marcel Dekker, 1998.
[12] T-M. Guerra, A. Kruszewski, L. Vermeiren, and H. Tirmant. Conditions of output stabilization for
nonlinear models in the Takagi-Sugeno’s form.Fuzzy Sets and Systems, 157(9):1248–1259, 2006.
[13] D. Ichalal, B. Marx, J. Ragot, and D. Maquin. An approach for the state estimation of Takagi-
Sugeno models and application to sensor fault diagnosis. In48th IEEE Conference on Decision and
Control, CDC’09, Shanghai, P.R. China, 2009.
27

[14] D. Ichalal, B. Marx, J. Ragot, and D. Maquin. Fault diagnosis in Takagi-Sugeno nonlinear sys-
tems. In7th IFAC Symposium on Fault Detection, Supervision and Safety of Technical Processes,
SAFEPROCESS’2009, Barcelona, Spain, 2009.
[15] D. Ichalal, B. Marx, D. Maquin and J. Ragot. Nonlinear observer based fault tolerant control for
nonlinear systems.8th IFAC Symposium on Fault Detection, Supervision and Safety for Technical
Processes, SAFEPROCESS’2012, Mexico, August 27-28, 2012.
[16] D. Ichalal, B. Marx, J. Ragot, and D. Maquin. State estimation of nonlinear systems using multiple
model approach. InAmerican Control Conference, ACC’2009, St. Louis, Missouri, USA, 2009.
[17] R. Isermann.Fault-Diagnosis Systems: An Introduction From Fault Detection to Fault Tolerance.
Springer, 2007.
[18] B. Jiang, Z.F. Gao, P. Shi, and Y.F. Xu. Adaptive fault-tolerant tracking control of near space vehicle
using Takagi-Sugeno fuzzy models.IEEE Transactions on Fuzzy Systems, 18(5):1000-1007, 2010.
[19] M. Johansson.Piecewise Linear Control Systems. PhD thesis, Department of Automatic Control,
Lund Institute of Technology, Sweden, 1999.
[20] J. Korbicz, J.M. Koscielny, Z. Kowalczuk, and W. Cholewa.Fault Diagnosis: Models, Artificial
Intelligence, Applications. Springer, 2004.
[21] A. Kruzewski, R. Wang, and T-M. Guerra. Non-quadratic stabilization conditions for a class of un-
certain non linear discrete-time T-S fuzzy models: a new approach.IEEE Transactions on Automatic
Control, 53(2):606–611, 2008.
[22] L. Ligang, X. Su, P. Shi, and J. Qiu. Model approximation for discrete-time state-delay systems in
the T-S fuzzy framework,IEEE Transactions on Fuzzy Systems, 19(2): 366-378, 2011.
[23] B. Marx, D. Koenig, and J. Ragot. Design of observers for Takagi Sugeno descriptor systems with
unknown inputs and application to fault diagnosis.IET Control Theory and Application, 1(5):1487–
1495, 2007.
[24] E. Mazars, I.M. Jaimoukha, and L. Zhenhai. Computation of a reference model for robust fault
detection and isolation residual generation.Journal of Control Science and Engineering, article ID
790893, 2008. doi:10.1155/2008/790893.
[25] E. Mazars, Z. Li, and I.M. Jaimoukha. A QMI approach to the robust fault detection and isolation
problem. In6th IFAC Symposium on Fault Detection, Supervision and Safety of Technical Processes,
SAFEPROCESS’2006, Beijing, China, 2006.
[26] A.M. Nagy, G. Mourot, B. Marx, J. Ragot, and G. Schutz. Systematic multimodeling methodology
applied to an activated sludge reactor model.Industrial and Engineering Chemistry Research,
49(6):2790–2799, 2010.
28

[27] A.M. Nagy, G. Mourot, B. Marx, G. Schutz, and J. Ragot. Model structure simplification of a
biological reactor. In15th IFAC Symposium on System Identification, SYSID’09, Saint Malo, France,
2009.
[28] S.K. Nguang, P. Shi, and S. X. Ding. Fault detection for uncertain fuzzy systems: An LMI approach.
IEEE Transactions on Fuzzy Systems, 15(6):1251–1262, 2007.
[29] R.C.L.F. Oliveira, and P.L.D. Peres. Stability of polytopes of matrices via affine parameter-
dependent Lyapunov functions: Asymptotically exact LMI conditions.Linear Algebra and its
Applications, 405:209–228, 2005.
[30] R. Orjuela. Contribution a l’estimation d’etat et au diagnostic des systemes representes par des
multimodeles. PhD thesis, Institut National Polytechnique de Lorraine (INPL), Nancy, France,
2008. (in french).
[31] R. Orjuela, B. Marx, J. Ragot, and D. Maquin. State estimation for non-linear systems using a
decoupled multiple model.International Journal of Modelling, Identification and Control, 4(1):59–
67, 2008.
[32] R. Patton, P. Frank, and R. Clark.Fault Diagnosis in Dynamic Systems: Theory and Application.
Prentice Hall international, 1989.
[33] S. Raghavan and J.K. Hedrick.Observer design for a class of nonlinear systems. International
Journal of Control, 59: 515–528, 1994.
[34] A. Sala, and C. Arino. Asymptotically necessary and sufficient conditions for stability and perfor-
mance in fuzzy control: Applications of Polya’s theorem.Fuzzy Sets and Systems, 158(24):2671–
2686, 2007.
[35] J. Stoustrup, and H. Niemann. Application of an H∞ based FDI and control scheme for the three
tank system. In4th IFAC Symposium on Fault Detection, Supervision and Safety for Technical
Processes, SAFEPROCESS’2000, Budapest, Hungary, 2000.
[36] J. Stoustrup, and H. Niemann. Fault estimation – a standard problem approach.International
Journal of Robust and Nonlinear Control, 12(8):649–673, 2002.
[37] X. Su, P. Shi, L. Wu, and Y.D. Song. A novel approach to filter design for TS fuzzy discrete-time
systems with time-varying delay.IEEE Transactions on Fuzzy Systems, 20(6), 1114-1129, 2012
[38] T. Takagi, and M. Sugeno. Fuzzy identification of systems and its applications to modeling and
control. IEEE Transactions on Systems, Man and Cybernetics, 15(1):116–132, 1985.
[39] M. Takahashi. Self-repairing and adaptive control of MIMO systems with faulty sensors.Interna-
tional Journal of Innovative Computing, Information and Control, 5(10B):3573–3582, 2009.
29

[40] K. Tanaka, T. Hori, and H.O. Wang. A multiple Lyapunov function approach to stabilization of
fuzzy control systems.IEEE Transactions on Fuzzy Systems, 11(4):582–589, 2003.
[41] K. Tanaka, T. Ikeda, and H.O. Wang. Robust stabilization of a class of uncertain nonlinear systems
via fuzzy control: quadratic stabilizability,H∞ control theory, and linear matrix inequalities.IEEE
Transactions on Fuzzy Systems, 4(1):1–13, 1996.
[42] K. Tanaka, T. Ikeda, and H.O. Wang. Fuzzy regulators and fuzzy observers: Relaxed stability
conditions and LMI-based designs.IEEE Transactions on Fuzzy Systems, 6(2):250–265, 1998.
[43] K. Tanaka, and H.O. Wang.Fuzzy Control Systems Design and Analysis: A Linear Matrix Inequality
Approach. John Wiley and Sons, 2001.
[44] H.D. Tuan, P. Apkarian, T. Narikiyo, and Y. Yamamoto. Parameterized linear matrix inequality
techniques in fuzzy control system design.IEEE Transactions on Fuzzy Systems, 9(2):324–332,
2001.
[45] J. Wang, B. Jiang, and P. Shi. Adaptive observer based fault diagnosis for satellite attitude control
system.International Journal of Innovative Computing, Information and Control, 4(8):1921–1929,
2008.
[46] Y. Wang, W. Wang, and D. Wang. LMI approach to design fault detection filter for discrete-time
switched systems with state delays.International Journal of Innovative Computing, Information
and Control, 6(1):387–397, 2010.
[47] J. Yoneyama.H∞ filtering for fuzzy systems with immeasurable premise variables: an uncertain
system approach.Fuzzy Sets and Systems, 160(12):1738–1748, 2009.
[48] Y. Zhao, J. Lam, and H. Gao. Fault detection for fuzzy systems with intermittent measurements.
IEEE Transactions on Fuzzy Systems, 17(2):398–410, 2009.
30


















