Fatigue and Stochastic Loads_RYCHLIK
19
7/15/2019 Fatigue and Stochastic Loads_RYCHLIK http://slidepdf.com/reader/full/fatigue-and-stochastic-loadsrychlik 1/19 Board of the Foundation of the Scandinavian Journal of Statistics Fatigue and Stochastic Loads Author(s): Igor Rychlik Source: Scandinavian Journal of Statistics, Vol. 23, No. 4 (Dec., 1996), pp. 387-404 Published by: Wiley on behalf of Board of the Foundation of the Scandinavian Journal of Statistics Stable URL: http://www.jstor.org/stable/4616416 . Accessed: 08/07/2013 09:50 Your use of the JSTOR archive indicates your acceptance of the Terms & Conditions of Use, available at . http://www.jstor.org/page/info/about/policies/terms.jsp . JSTOR is a not-for-profit service that helps scholars, researchers, and students discover, use, and build upon a wide range of content in a trusted digital archive. We use information technology and tools to increase productivity and facilitate new forms of scholarship. For more information about JSTOR, please contact [email protected]. . Wiley and Board of the Foundation of the Scandinavian Journal of Statistics are collaborating with JSTOR to digitize, preserve and extend access to Scandinavian Journal of Statistics. http://www.jstor.org This content downloaded from 194.210.224.251 on Mon, 8 Jul 2013 09:50:07 AM All use subject to JSTOR Terms and Conditions
-
Upload
baran-yeter -
Category
Documents
-
view
22 -
download
0
Transcript of Fatigue and Stochastic Loads_RYCHLIK

7/15/2019 Fatigue and Stochastic Loads_RYCHLIK
http://slidepdf.com/reader/full/fatigue-and-stochastic-loadsrychlik 1/19
Board of the Foundation of the Scandinavian Journal of Statistics
Fatigue and Stochastic LoadsAuthor(s): Igor RychlikSource: Scandinavian Journal of Statistics, Vol. 23, No. 4 (Dec., 1996), pp. 387-404Published by: Wiley on behalf of Board of the Foundation of the Scandinavian Journal of Statistics
Stable URL: http://www.jstor.org/stable/4616416 .Accessed: 08/07/2013 09:50
Your use of the JSTOR archive indicates your acceptance of the Terms & Conditions of Use, available at .http://www.jstor.org/page/info/about/policies/terms.jsp
.JSTOR is a not-for-profit service that helps scholars, researchers, and students discover, use, and build upon a wide range of
content in a trusted digital archive. We use information technology and tools to increase productivity and facilitate new forms
of scholarship. For more information about JSTOR, please contact [email protected].
.
Wiley and Board of the Foundation of the Scandinavian Journal of Statistics are collaborating with JSTOR to
digitize, preserve and extend access to Scandinavian Journal of Statistics.
http://www.jstor.org
This content downloaded from 194.210.224.251 on Mon, 8 Jul 2013 09:50:07 AMAll use subject to JSTOR Terms and Conditions

7/15/2019 Fatigue and Stochastic Loads_RYCHLIK
http://slidepdf.com/reader/full/fatigue-and-stochastic-loadsrychlik 2/19
? Board of the Foundation of the Scandinavian Journalof Statistics 1996. Published by Blackwell Publishers Ltd., 108Cowley Road,
Oxford OX4 IJF, UK and 238 Main Street, Cambridge, MA 02142, USA. Vol. 23: 387-404, 1996
Fatigue and Stochastic Loads*
IGOR RYCHLIKUniversity of Lund
ABSTRACT. We give a general introductionto fatigue and discuss a simple model of fatigue
damage accumulation in metals under variable loading conditions. Loads are modelled as
stochastic processes and importantcharacteristics of loads' variability, relevant for fatigue, are
presented.We also discuss methods to generate loads for fatigue tests.
Key words: crossings, fatigue, local extremes, oscillation measures, rainflow cycles
1. Introduction
Fatigue is a process of "ageing" or "degrading" of materials, mostly metals, in components
and structures subjected to time-variable external loading conditions. The fatigue process
causes the deterioration of the material's ability to carry the intended load. It is a common
opinion among reliability engineers that failure of mechanical components in most cases is
caused by fatigue.
Fatigue has been the subject of numerous research studies conducted by mechanical
engineers, material scientists, physicists, chemists, structural engineers and mathematicians
over more than 150 years. The complexity of the fatigue process and related reliability
problems requires development of new statistical tools for analysing fatigue data, design of
experiments and tests. One also needs reliable stochastic models for materials properties,
environment variability and for uniaxial and multiaxial loads. At present such models use i.a.
random morphology, integral geometry, point processes, Gaussian processes and stochastic
differential equations.
In this paper we review an approach to fatigue under random loading conditions based on
a concept of a macroscopic damage accumulations in the material, see also Sobczyk (1987)
and Miller (1993). Modelling of crack development is not considered and we refer to a
monograph by Sobczyk & Spencer (1992).
2. Fatigue
The fatigue phenomenon is a very complicated process which can be defined as a process ofnucleation (or crack initiation) and crack growth when some cracks stop growing while
others collapse and create long cracks. The growth rate increases with the crack length, even
under small variable loading. Due to surface imperfections, inclusions, grain boundaries etc.,
initiation of cracks usually takes place at the surface of the metallic body at spots of high
stress concentration.
Depending on the magnitude of the load, the properties of the material, and the
smoothness of the surface, the crack nucleation phase may constitute the main part of the
total fatigue life or, in other cases, it may be completely absent. This means that fatigue
failure is directly a result of the crack growth process. Summarizing, the fatigue damage
process is very complicated and depends on many factors:
* This paper was presented as an Invited Lecture at the 15th Nordic Conference on Mathematical
Statistics, Lund, Sweden, August 1994.
This content downloaded from 194.210.224.251 on Mon, 8 Jul 2013 09:50:07 AMAll use subject to JSTOR Terms and Conditions

7/15/2019 Fatigue and Stochastic Loads_RYCHLIK
http://slidepdf.com/reader/full/fatigue-and-stochastic-loadsrychlik 3/19
388 I. Rychlik Scand J Statist 23
(a) the micro-structure of the material: the crystal size and geometry distribution of
inclusions, surface finish, etc.;
(b) the variability of applied loads as well as the geometry and dimensions of the object,
notches, etc.; and
(c) the environmental conditions, such as aggressive chemical environment leading to
corrosion, large temperature variations, etc.,
see Miller (1993) for more detailed discussion. It is obvious, from the complexity of the
fatigue phenomena that observed life times to failure have a considerable variation.
The first systematic and quantitative investigation of fatigue damage was performed by
August Wohler in 1858 and resulted in the widely known Wohler curve, or S-N diagram,
which shows the relationship between the amplitude (S) of the applied (approximatively
sinusoidal) stress function and the number (N) of periods to fatigue failure. The S-N
diagram is an important measure of material strength for fatigue.
Assume that we have a set of test specimens produced so that maximal homogeneity of thespecimens' shape and surface is achieved. Let all the specimens be subjected to an oscillatory
load y, where y may represent a stress or elongation function. For simplicity we assume that
the function y is a sinusoid function,
Sy, = m + - sin (27rAt), 0 <t <,,
where r is the time of failure.
In practical tests one sometimes uses other shapes of the periodic "cycles" constituting y
than the sinusoidal. However, it has been observed that the particular shape of the function
is of secondary importance compared to the period, maximum and minimum value of theoscillatory load. Thus the parameters u = max y, and v = min yt can be used as parameters
of the simple oscillatory load, also called constant amplitude load.
Although the specimens are almost identical and the loading function y is the same for all
specimens, one often observes a large variability in life times T,which is due to randomness
of material properties. In fatigue analysis one equivalently uses sn(v, u) = T i, the number of
cycles to failure or time to failure T,as a measure of materials strength. In order to identify
the properties of sn(v, u) one has to perform fatigue tests for different values of (v, u). It is
a common experience that the values of sn(v, u) closely follow a log normal distribution.
Further, one often assumes, in contrast to most observations, that the variance of ln (sn(v, u))
is independent of (v, u). Consequently, a simple regression model for the strength process
sn(v, u) is the following one:
sn(v, u) = K SN(v, u), K = exp (aX) (1)
where X e N(O, 1) and SN(v, u) is a deterministic strength function, which is equivalent to the
S-N diagram. In practical codes (or specifications) one often fits a simple form for SN(v, u)
SN(v, u) = SN(u -v) = {k(u -v)J if u-v >,so, (2){k (u - v) if u - v < so,
where /B a t 1 and kI = k(so) - if ,B< oo. If ,B= oo the amplitude so is called the fatigue
limit and means that a load with amplitude u-
v < so does not cause any fatigue damage.Relatively standard techniques from regression analysis can be used to estimate the parame-
ters k, a, fJ,so and a. However, since fatigue experiments are very expensive, one usually has
rather small sets of data and hence the design of experiment is important.
? Board of the Foundation of the Scandinavian Journal of Statistics 1996.
This content downloaded from 194.210.224.251 on Mon, 8 Jul 2013 09:50:07 AMAll use subject to JSTOR Terms and Conditions

7/15/2019 Fatigue and Stochastic Loads_RYCHLIK
http://slidepdf.com/reader/full/fatigue-and-stochastic-loadsrychlik 4/19
Scand J Statist 23 Fatigue and stochastic loads 389
2.1. Fatigue damage
In the previous section we have used a simple constant amplitude load y (for example a
sinusoidal function). Obviously real loads are seldom so regular. Consequently we need to
find methods to characterize variability of a load relevant for fatigue life prediction.The approach presented here is based on a concept of accumulation of damage in a
material due to fatigue phenomena. Although it is difficult to define how to measure
(physically) fatigue damage, the concept of damage has physical meaning and should be
related to the collection of cracks in the material. This is indicated by experiments where a
thin layer of the surface was periodically removed from a fatigued specimen (thereby
eliminating the early stages of short crack growth). Tests of such renovated specimens at the
same stress-strain level indicate that no damage has been introduced into the bulk of the
material, neglecting the changes in the response to a load, because full life time has been
restored.
Here we shall present a linear damage accumulation model proposed by Palmgren (1924)and Miner (1945). This approach is commonly used in engineering practice.
We begin with the damage intensity for a constant amplitude load function y, i.e. a
periodic function, with frequency i, and such that in a period it has only one local minimum
with height v and one local maximum with height u. On a unit scale, a damage intensity is
defined as d, = A/SN(v, u), where SN(v, u) is a standard strength of a specimen obtained from
the S-N diagram. The total damage accumulated in the interval [0, T] is defined as
bT
DT= dtdt,
and the fatigue failure time-
has distribution given by P(T S t) = P(Dt > K), where K is arandom critical level; see (1).
Before we give a general form of the Palmgren-Miner damage accumulation model we
present a physical motivation for the method. It is generally accepted that elastoplastic
deformations cause damage to material. A large enough deformation destroys a given piece
of material immediately, while smaller deformations lead to eventual destruction if they are
applied repeatedly. Thus a single hysteresis loop in the stress-strain plane constitutes a basic
event for damage assessments. In the simplest models the order of the hysteresis loops is
neglected and damage is attached to each single hysteresis loop. Then the total damage is
defined as a sum of damages attached to all closed hysteresis loops.
The hysteresis loops can be easily identified in a graph of the (stress, strain)-function. The
(stress, strain)-functions are sometimes measured in fatigue experiments, particularly if there
are regions where plastic deformations can be significant, e.g. in notched components.
However, it is a common situation in the design stage of a construction or in a fatigue life
prediction that only external loadings are known and that the stress/strain-relations need to
be approximated using numerical algorithms. Consequently, the stress function alone is often
used both to identify hysteresis cycles and to attach damages to cycles.
Let v, u be the lowest and highest points of a hysteresis loop on a stress axis and let the
damage attached to the loop be denoted byf(v, u). The total damage DT accumulated in the
time interval [0, T] is then a sum of damages attached to all closed hysteresis loops {(vi, ui)},say, in [0, T], i.e.
DT = Zf(vi, ui). (3)
Using a constant amplitude fatigue life data (S-N curve) we can calibrate the total damage
? Board of the Foundation of the Scandinavian Journal of Statistics 1996.
This content downloaded from 194.210.224.251 on Mon, 8 Jul 2013 09:50:07 AMAll use subject to JSTOR Terms and Conditions

7/15/2019 Fatigue and Stochastic Loads_RYCHLIK
http://slidepdf.com/reader/full/fatigue-and-stochastic-loadsrychlik 5/19
390 I. Rychlik Scand J Statist 23
and obtain the general Palmgren-Miner linear damage accumulation law
DT= SN(vZ U P(T < t) =P(Dt > K). (4)
The remaining problem is to identify the lowest and highest points of a hysteresis loop on a
stress axis of closed hysteresis loops {(vi, ui)} given the stress function y. The so-called
rainflow method is a method to do this, as described in the following section.
The most critical assumption in the Palmgren-Miner model is that the damage of the ith
cycle is independent of the magnitudes of other cycles. There are many experiments
disclosing sequential effects, e.g. the fact that the crack grows slower after an overload.
However, there is no general damage accumulation method which can take into account all
sequential effects and which is uniformly better than other approaches. Consequently, if the
sequential effects are not dominating the damage accumulation process, the simplest ap-
proach of Palmgren and Miner is still frequently used in engineering practice. In addition,
some engineers interpret the rainflow count as a method to introduce sequential effects
(through hysteresis memory of a material) into the Palmgren-Miner damage accumulation
model. This is then used to explain the relatively good accuracy in fatigue life prediction
based on the rainflow method and the Palmgren-Miner damage, i.e. using equations (4).
Furthermore, note that in material science, there is and has been an intensive discussion on
whether and how the energy dissipated in a material during elastoplastic loading and the
accumulated fatigue damage are related to each other. Brokate et al. (1994) showed that
both energy dissipated in the material and the Palmgren-Miner fatigue damage (4) can be
described using the so-called hysteresis operators with a set of rainflow cycles as a basic
component. Consequently the energy dissipated in a material can be well-approximated by
formula (3) with (may be) a different function f than in (4).
3. Rainflow count, basic properties
The rainflow method was introduced by Endo in the late sixties, the first paper in English
being Matsuishi & Endo (1968). The original paper in Japanese has been reprinted in
Murakami (1992). His definition was a complicated recursivealgorithm identifying the closed
hysteresis loops in the strain-stress plane. Endo described the method using a model of rain
flowing from a pagoda roof (which explains the name). The first non-recursive definition of
the method was given in Rychlik (1987).
Definition 1
Let CT,0 < T < oo, be a space of continuous real functions defined on [0, T]. For y E CT,
define a real function x by the following procedure:
For any fixed t E[0, T] let t -, t + be the following time points
_ usU C- 0, t):Y S>Yt }o
lo if ys < yt for all sE [0, t),
+ Jinf Is E (t, T): ys>
y, },
}T if ys <y for all s e (t, T)
and let x , x + be the lowest points in the intervals [t-, t], [t, t +], respectively, i.e.
Boardf th nyd:i- < s < te,xS + = infyr: t < s <a+t (6)
This content downloaded from 194.210.224.251 on Mon, 8 Jul 2013 09:50:07 AMAll use subject to JSTOR Terms and Conditions

7/15/2019 Fatigue and Stochastic Loads_RYCHLIK
http://slidepdf.com/reader/full/fatigue-and-stochastic-loadsrychlik 6/19
Scand J Statist 23 Fatigue and stochastic loads 391
Xt t
t- ~~t t+
Fig. 1. Definitionof rainflow ycle.
then x, is given by
Smax(x,<x+) ift+ < Toryt =YT and t < T, (7)
lx= otherwise,
see Fig. 1. A function rfc = (rfc, = (xt, yt), t E [0, T]), will be called a rainflow unction of y
and a pair (xt, yt) such that xt <Yt is called a rainflow cycle originating at t, with top yt,
bottom x,.
We turn now to the damage DT defined by (4); for a positive function f(v, u) > 0, v < u,
a damage functional is given by
y -+DT(f) =E f(rfct)l{(x,y):x<y}(rfct), (8)
t e [0, T]
where lA(X) = 1 if x c A and zero otherwise. In what follows we shall equivalently use the
notation DT, DT(f) or D(f; y). In practice ft(v, u) = 1/N(v, u), where N(v, u) is a S-N
curve. Using the S-N curve (2) with ,B= oo and fatigue limit s0 >0 the total damage
becomes
Dt k Z (y'-x Y',
Yt- Xt -> So
where a and k are material dependent constants (k is usually very large).
Given an observed load y and a S-N curve it is a straightforward task to compute the
total damage DT using the rainflow algorithm, given in definition 1, and (8). However, let e.g.
y be a measurement of a stress at a fixed point of a truck travelling between locations A and
B, say. Obviously, y can not be reproduced by a new measurement and it seems natural to
model y as a sample path of a stochastic process.Now, if y is modelled by a stochastic process the important question is how to compute
expected damage, its variance or a distribution function given the law of y. Since the rainflow
function rfc depends in a very complicated way on y, (8) is not very convenient for stochastic
analysis of DT. In the following two subsections we shall represent a rainflow function as a
point process in R2 and describe it using a counting distribution, i.e. a number of points in
a suitable class of subsets of R2. Next the total damage DT will be written in a form of an
integral of the counting distribution. Since the counting distribution is equal to a number of
upcrossings of an interval by y (the same as used in Doob's upcrossing lemma for
supermartingales) the computation of expected damage is more tractable.
3.1. Countingdistribution
We begin with a simple lemma.
? Boardof the Foundation f the Scandinavianournalof Statistics1996.
This content downloaded from 194.210.224.251 on Mon, 8 Jul 2013 09:50:07 AMAll use subject to JSTOR Terms and Conditions
7/15/2019 Fatigue and Stochastic Loads_RYCHLIK
http://slidepdf.com/reader/full/fatigue-and-stochastic-loadsrychlik 7/19
392 I. Rychlik Scand J Statist 23
Lemma 1
For y E CT, T < ?O, the number of times the rainflow amplitude is at least e > 0, i.e.
NT(E) = #{t E [0, T]:y t-xt > }, (9)
is finite.
By lemma 1, the set rfc(y) = {(x,, yt): Yt> xt, t E [0, T]} is countable (and measurable),
hence it is a point process in {(v, u): v < u}. The set will be called a rainflowcount. A rainflow
count can be uniquely defined using its counting distribution
NT(V, U) = # {t E [O,T]: v, uE [xt, y,]}, v < u. (10)
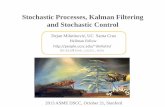
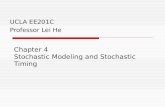
Example 1. Low frequency Gaussian white noise process. Let Y, be a zero-mean Gaussian
process with the spectrum
S(i) = if JA2< and 0 otherwise. (11)
In Fig. 2(a) we show a part of the simulated process and in Fig. 2(b) we present a point
process of rainflow cycles rfc(Y) with its counting distribution NT(V, u) defined by (10).
In the following theorem we give an integration by parts formula. The formula will be used
repeatedly to compute or estimate DT (8), given the counting distribution NT(V, u). The
theorem is proved under some assumptions on the smoothness of the function f(v, u),
specified in the following definition assumed for simplicity throughout.
Definition 2Let f(v, u), v < u, be a positive real function such that, for all u, f(u, u) = 0 (assumed for
simplicity only), with the indicated derivatives:
af(v,u) a02fv U)afu) =f2(v, u) and
A=f2(v,u).Au avAu
(a) (b)
3~~~~~~~~~~~~
2
1~~~~~~~~~~~~
>0 ~~~~~~~~~~~~~~~~urves at:
0~~~~~~~~~~~2-1~~~~~~~~~~5
-100; lS tdyX 0 BR! 1
-2 ~ ~ ~ ~ ~ ~ ~ ~ ~~~--2 ~~~~~~~~~~~3-
-o 20 40 60 80 100 -2 02 4
t trough (v)
Fig. 2. (a) Part of a simulated sample path of a zero mean Gaussian process Y, t E [0, T], with spectrum S(i) (11).
(b) Rainflow count rfc(Y) (dots) and isolines of the counting distribution NA(V U).
? Board of the Foundation of the Scandinavian Journal of Statistics 1996.
This content downloaded from 194.210.224.251 on Mon, 8 Jul 2013 09:50:07 AMAll use subject to JSTOR Terms and Conditions

7/15/2019 Fatigue and Stochastic Loads_RYCHLIK
http://slidepdf.com/reader/full/fatigue-and-stochastic-loadsrychlik 8/19
Scand J Statist 23 Fatigue and stochastic loads 393
Assume that for all u e R, f2(u, u) ) 0 is a continuous function of u, and for all v < u,
f12(v, u) < O. If for all x < z
Cz ru
J
{I (V, U)I dvdu < ,
ox x
then f will be called a damage function.
The following theorem gives an integration by parts formula to compute the total damage
DT-
Theorem 1
For y E CT, let NT(V, u) be its rainflow counting distribution,defined by (10), and let f be a
damage function (see definition 2). Then the total damage DT is given by
DT - NT(V, u)fI2(V, u)dvdu+ NT(U, u)f2(u, u)du. (12)%V<U R
Note that in the proof of (12) only the integrability of the second derivativef12is needed.
The additional assumptions that f2(u, u) > 0 and that f12(v, u) s< 0, imposed in definition 2,
ensure that the damage DT is a non-decreasing function of T for any continuous y. The
continuity of DT will be discussed in subsection 3.5.
The case when f(v, u) = (u - v)c, a ? 1, is of special interest. We then refer to DT(ft) as
the oc-damage.From the last theorem it follows that
DT(f') = N U(u,u) du, DT(f) = 2 NT(V, u) dv du.,R 0 V-<U
For c-damage, the integration by parts formula (12) can be simplified by considering NT(h),
defined by (9), instead of NT(V, U), since then
DT(ft) = oc h NT(h) dh. (13)
3.2. Rainflow count and oscillation measure
In the previous subsection we have defined a rainflow function (t, y) -+ rfc5, and used it to
evaluate the damage functional DT through (8). Since the rainflow function depends in a
complicated way on y, this approach is inconvenient if one wishes to study the dependence
of DT on time T. An alternative way is to use integration by parts formulas (12) or (13) to
compute DT and determine how NT(V, u) and NT(h) depend on T. This approach is only
meaningful if one can find an alternative way to compute NT(V, u) and NT(h) than by (10)
and (9), respectively. A proof of the following characterization of NT(V, U), V < u, can be
found in Rychlik (1993),
NT(V, U) = number of passages from v to u by y in [0, T],
which is made precise in the following lemma. Scheutzow (1994) proves this relationship for
regular functions, e.g. cadlag functions. The relationship between crossings and rainflow
counting distribution has been worked out independently by a research team from TEC-
MATH in Kaiserslautern and the author, see papers 3 and 4 in Murakami (1992).
? Board of the Foundation of the Scandinavian Journal of Statistics 1996.
This content downloaded from 194.210.224.251 on Mon, 8 Jul 2013 09:50:07 AMAll use subject to JSTOR Terms and Conditions

7/15/2019 Fatigue and Stochastic Loads_RYCHLIK
http://slidepdf.com/reader/full/fatigue-and-stochastic-loadsrychlik 9/19
394 I. Rychlik Scand J Statist 23
u ------ -- -
v----- ---- VW
I i i Ii
TO=O S1 T1 S2 T2
Fig. 3. Illustration of the first passage times Si, Ti, in lemma 2.
Lemma 2
For y E CT and any fixed levels v < u, define the sequence of first passage times, see Fig. 3,
To=0 and
S1 =inf{t ,0:yt =v}, T1=inf{t >S1:y, =u},
S2=inf{t > T,:yt =V}, T2=inf {t S2:Y, =U},
with the convention that inf {0}= + oc. Then
NT(V, U) = max {n: Tn< T}. (14)
Thefunction NT(V, U) = max {n: Tn< T} is called an oscillation measure.
The formulas (14) and (12) form the basis for computation of expected damage due
to rainflow cycles. In the special case of a-damage, i.e. f/(v, u) = (u - v) , a > 0, the
simpler formula (13) can be used. However, we need a computationally more convenientcharacteristic of NT(h) than the defining relation NT(h) = the number of rainflow cycles in
[0, T] with amplitude at least h. In Rychlik (1994) we gave a characterization of NT(h)
similar to (14).
3.3. Rainflow cycles and a sequence of turningpoints
As mentioned in section 1, usually, cycles with small amplitudes do not cause any damage,
e.g. so > 0 and ,B= oo in (2). Consequently, all cycles with small amplitude are often removed
from the observed load and the values of y are discretized. The procedure is called hysteresis
filtering. We shall now formalize this procedure mathematically.
For a fixed h > 0, let = f{y0+ ih: i = .. ., -1, 01, 2, . . .} be a set of levels. Define by
induction a sequence of first passage times {Tj : let T0= 0 and given Tj, let
u =inf{z E : z >y,j}, v =sup {z E1: z <yj4,
then
Tj+i =inf {t > tj:y, =u or Yt= v},
as before inf {0} = + oo. Consequently, zj,j > I, are the time points when y, passes the
discrete levels in W. Obviously, if T < oo then K = sup {j: Tj< T} < oo, since y is continuous.
Let 9 be an approximation of y obtained by drawing straight lines between points
{(TO,YT) . * (rK, YTK),(T, YT }-Further data reduction is obtained by deleting from { To'YT ).(TKZYTK), (T Y) } all
points (zi, y,,) which are not points of strict local extremes in y. The remaining sequence is
called the sequence of turning points, see the following definition.
? Board of the Foundation of the Scandinavian Journal of Statistics 1996.
This content downloaded from 194.210.224.251 on Mon, 8 Jul 2013 09:50:07 AMAll use subject to JSTOR Terms and Conditions

7/15/2019 Fatigue and Stochastic Loads_RYCHLIK
http://slidepdf.com/reader/full/fatigue-and-stochastic-loadsrychlik 10/19
Scand J Statist 23 Fatigue and stochastic loads 395
Definition 3
Let {(ti, Mi)} I1, Mi = y.t, be the sequence of local maxima in 9. (If YTK YT, (T, YT) is
consideredas a point of local maximum.)Let to= 0 and definemi= inf {9t:ti -l < t <ti }
The sequence of pairs {(mi, Mi) lm is called a sequence of discretized turningpoints in y.
Applying he rainflowmethod o the sequenceof turningpointswe obtain thesequenceof
rainflow cycles {(mrfc, Mi }iMSince T < oo and y is a continuousfunction, sequencesof turningpoints and rainflow
cycles akefinitelymanyvalues romthe set 1.Consequently,heycan be uniquelydescribed
by means of bivariatehistogramsof (mi, Mi) and (mrfc, Mi) called in fatigue practice
Markov-respectivelyainflow-matricesnd whichare a commonway of savingthe observed
loads.
Denoteby NT(V, u) an oscillationmeasureof 9. (Obviously, AT(V, ) can be obtained rom
rainflowmatrix and vice-versa)by a simplealgebra.)The following emma ustifies he use
of rainflowmatriceso approximatehe rainflowdamageDT(Y) for a continuous unctiony.
Lemma 3
Let y ECT and 9 be its approximation defined in this subsection. Denote by NT(V, u) an
oscillation measure of 9, defined by (14) and let NT(V, u) be an oscillation measureof y. Then:
(a) For any u > v, NT(V, U) < NT(V, U) with equality when v, u E 1, (v < u).
(b) The numberNT(h) of rainflowamplitudesat least h counted in y is bounded rom below
by M, the numberof local maxima in 9, and NT(2h) < M < NT(h).
(c) For a damagefunction f, Dr(f; 9) TDT(f; y), (h - 2-n) as n -, oo.
3.4. Finiteness of rainflowdamage
If y has finitelymanyextremes hen the total damageDT is finitefor any damage unction.
Examplesof suchregularoadsare samplesof Gaussian ow frequencywhite noiseprocess
presentedn example1. Obviously, unctionsy of finitevariationmayhave infinitenumbers
of localextremesn [0, TI,seeexample2, but f, NT(U,U) dU S finite by Banach's heorem,
(see Freedman,1983,p. 209),and since it is assumed hat (u, u) = 0, for all u, the rainflow
damage s finite for all damage unctions, definedas in definition2.
Example2. Linear oscillator.Let Y, be the solution of a dampedharmonicoscillator
equationdrivenby a Gaussianwhite noise process, .e. let
Y','+2Yt + Y, = Wt, t >,0, (15)
where W, s a Gaussianwhite noiseprocess.Assumea' = 4Cand(Y0, Y0)= (XI,X2),where
Xi are independentN(0, 1) variables.Then Y, is a zero-mean tationaryGaussianprocesswith spectraldensity
a12Ry(A)=(1 -(2,%)2)2 + (2C)2(2ir))2
For the process Ytwe have (U2= U2, = 1. Consequently, lmost all sampleshave finite2-variation.However,sincea2,- oo, the processhas infinitelymanylocal extremes.
For the constantC= 0.01, in Fig. 4(a) we presenta partof a simulated, ampledprocessYk d whered = 0.005. Thefirst 100 ocalextremes remarkedas stars.Theplot on Fig. 4(b)showsthe rainflowcount rfc(Y)and we can see that most of the cyclesare along the line
y = x, i.e. haveverysmallamplitudes,wheredamage s negligible.
? Board of the Foundation of the Scandinavian Journal of Statistics 1996.
This content downloaded from 194.210.224.251 on Mon, 8 Jul 2013 09:50:07 AMAll use subject to JSTOR Terms and Conditions

7/15/2019 Fatigue and Stochastic Loads_RYCHLIK
http://slidepdf.com/reader/full/fatigue-and-stochastic-loadsrychlik 11/19
396 I. Rychlik ScandJ Statist23
(a) (b)
1.5
2 .
15 . ...
0.51
>- 0
-0.5-1
-1 -
-1.5 -
5 10 15 20 -f3 -2 -1 0 1 2t trough
Fig. 4. (a) Part of a simulated amplepath of a zero mean GaussianprocessYt,t E[0, 500],definedby (15), with
the first 100 local extremesmarkedas stars.(b) Rainflowcount rfc(Y) (dots).
If the function y has infinite variation then f NT(U, u) du = oo and, in order to avoid
pathological cases, we assume that f2(u, u) = 0 for all u E R. Under this assumption, using the
integral representation (12), the total damage is given by
"b "b- a
DT = { NT(U -h, u)f12(U -h, u) dh du,.a O0
where b = max, E[0 T] yt, a = mintE[OTj y,. Hence, in order to check if the total damage DT iS
finite we need to describe properties of the damage function f(v, U) for v close to u more
precisely, and limit the class of functions y.
For simplicity consider f(v, u) = (U - v) , o > 1. Then by ( 13) the total damage
b-a
DT(f;y) = f b ho INT(h)dh,
and NT(h) is the number of rainflow cycles in [0, T] with amplitudes at least h. Obviously,
the finiteness of DT depends on the growth rate of NT(h) as h tends to zero. This is exactly
the rate the number of local maxima M in lemma 3(b) grows as h tends to zero.
Theorem 2
Let Yt, t e [0, T], be a continuous Brownian motion starting at zero and
fl(v, u) = (u - v) ", 2 ) 1. Then the rainflowdamage DT( P; Y) is a.s. infinite or cx< 2 and a.s.
finite for oc> 2.
Example 3. Ornstein-Uhlenbeck process. Let Y, be a zero mean stationary Gaussian
process with covariance function r(t) = E[Yo Yt] = a2(2c) 1 exp { -c|t|}, c > 0. The Orn-
stein-Uhlenbeck process Y is extremely irregular, almost all samples have infinite variation
and the set of local maxima is countable and dense in [0, T], see also Fig. 5(a). Furthermore,NT(h) = O(h 2) as h tends to zero, and the oc-damage s infinite for ac< 2. (In the simulation
we used Y,t+= Ytexp{-ck31}+ X cr[(l-exp { -2c 6j})I(2c)]1/2, = 0.002, whereX is a
standard Gaussian variable independent of Y_,s < t.)
g Board of the Foundation of the Scandinavian Journal of Statistics 1996.
This content downloaded from 194.210.224.251 on Mon, 8 Jul 2013 09:50:07 AMAll use subject to JSTOR Terms and Conditions

7/15/2019 Fatigue and Stochastic Loads_RYCHLIK
http://slidepdf.com/reader/full/fatigue-and-stochastic-loadsrychlik 12/19
Scand J Statist 23 Fatigue and stochastic loads 397
(a) (b)3
-0.5
2 -::.
0
-1.5
-2-2
0 0.5 1 1.5 2 =3 2 -1 0 1 2t trough
Fig. 5. (a) Part of a simulated amplepath of an Ornstein-Uhlenbeck rocess Y, 0 ? t ?200, with
parameters = 0.5, a = 1. (b) Rainflowcountrfc(Y)(dots).
3.5. The rainflow damage process
Let Yt, t E [0, + oo) be a continuous function. Obviously, for any finite T > 0 the function y
restricted to [0, T] is in CT and we can define the rainflow damage DT(f; y). Let DO= 0 and
let f be a damage function such that DT(f; y) < oo for all finite T then:
(i) DT is a continuous non-decreasing function.
(ii) DT is a Lipschitz continuous function, if yt is Lipschitz continuous (f(u, u) = 0 for all
u ER). Furthermore
rT ST
DT ={0 D'dt =jf2(x, yt)1{x x>o}(YD)Y;dt, (16)
where x- is defined as in definition 1.
Note that in the case when f(v, u)=
G(u)-
G(v) the total damage can be written inparticularly simple form DT =f-TG'(yt)1{x >o}(y)y dt.
4. Expected rainflow damage
Let Yt, t > 0, be a random process with a.s. continuous sample paths, f a damage function
(as in definition 2) and DT(f; Y) a rainflow damage process. In this section we study the
expectation E[DTI.
From (12), using Fubini's theorem, the necessary condition for finiteness of expected
damage is finiteness of measure
+ 00
nT (V, u) = E[NT(V, U)] = E P(Tn < T), ( 17)n= I
where the oscillation measure NT and first passage times Tnare defined in lemma 2. Then the
? Board of the Foundation of the Scandinavian Journal of Statistics 1996.
This content downloaded from 194.210.224.251 on Mon, 8 Jul 2013 09:50:07 AMAll use subject to JSTOR Terms and Conditions

7/15/2019 Fatigue and Stochastic Loads_RYCHLIK
http://slidepdf.com/reader/full/fatigue-and-stochastic-loadsrychlik 13/19
398 I. Rychlik Scand J Statist 23
expected damage is given by
E[DT]= - T nT(v, u)fI2(v, u) dvdu + J'nT(u u)f2(u, u) u. (18)v_<u R
Since Tnare rather complicated first passage times we can not expect to find explicit forms
for nT(v, u) except for some special cases. Hence approximation methods are often used, see
Rychlik (1988). We begin with two important classes of processes when explicit forms do
exist.
4.1. Diffusion processes
Let Y,, t > 0, be a regular diffusion process on R with diffusion coefficient a(z) > 0 and drift
coefficient b(z). (The sample paths of Y are a.s. continuous and have infinite variation.) For
arbitrary x0 define
T'byr b(z)S(x)= exp -I dz dy,
Jxo { Jx0 a(z) }
the so-called scale function. We assume that 2b(z)/a(z) is locally integrable and that
S(- oo) = - oo, S( + oo) = + oo and S(x) is finite, for all x E R, i.e. all points are accessible
by Yt except -oo and + oo. Then
m(x)= a(x)S'(x)'
where
S'(x) exp{-x a(z)dz}
is the density of speed measure. We assume that M = Jftm(x)x < cc, and then the density
of the stationary distribution of Y is given by
f(x) = M-'m(x).
If the density of Y0is f(x) then Y is strictly stationary, which we assume.
We turn now to the measure nT(v, u) defined by (17). For fixed v < u, let Ti be the first
passage times defines in lemma 2, and the oscillation measure NT(V, U) = max {n: Tn< T}.
The variables {Ti - Ti 1}, i > 2, are i.i.d. with finite expectation
E[T - Ti I = 2M(S(u) -S(V)),
where M = J 0m(x) dx <co. Although the diffusion process Ytis strictly stationary, T1and
T2- T, have different distributions. (This is a technical complication caused by the fact that
the rainflow function begins at a fixed time point (zero).) Since T1, T2- T1, T3- T2 are
independent variables then, by the elementary renewal theorem,
lim NAv,u) E[NT(V,u)] 1T-+ o T t cx T 2M(S(u) - S(v))n(,u,19
say. We call n(v, u) the oscillation intensity.
Example 3 continued. Let Y, be a zero mean stationary Gaussian Ornstein-Uhlenbeck
process. The process Y is a diffusion with diffusion coefficient a(z) = U2 and drift coefficient
?) Board of the Foundation of the Scandinavian Journal of Statistics 1996.
This content downloaded from 194.210.224.251 on Mon, 8 Jul 2013 09:50:07 AMAll use subject to JSTOR Terms and Conditions

7/15/2019 Fatigue and Stochastic Loads_RYCHLIK
http://slidepdf.com/reader/full/fatigue-and-stochastic-loadsrychlik 14/19
Scand J Statist 23 Fatigue and stochastic loads 399
3
CO 0 ~~~~.Level curves at:
=30 -2 -1 0 12
-1 ~~~~~~~~~~~5102050100
-2
-3-3 -2 -1 0 1 2
trough (v)
Fig. 6. Simulated ainflow ountrfc(Y)(dots),whereY, 0 < t < 200,is an Ornstein-Uhlenbeckrocesswith parameters = 0.5, a = 1; and isolinesof the intensity200 if(v,u) definedby (20).
b(z) = - cz. The scale function is given by
S(x) exp {cz }dz.
A stationary intensity ,u(v,u), say, of the point process of maxima and rainflow minima
rfc(Y) is obtained from (19);
u2n(v, u) = S'(u)S'(v) = y cePi(2+v2)}0
yu(v, ) = -@ aD(eUa =M(S(u) - (v))3 = exp 2 d)z) (20)
since M = a it/C. In Fig. 6 we present the intensity ,u(v,u) with simulated sample of the
point process of maxima and rainflow minima rfc(Y).
4.2. A Markov chainof turningpoints
For a stationary continuous process Yt, let {(mi, Mi)} be a discretized sequence of turning
points, see definition 3. Assume that {(mi, Mi)} is a time-homogeneous irreducible Markov
chain. If the intensity of local maxima Mi and the transition matrices from minimum to
maximum and maximum to minimum are given, then the oscillation intensity n(v, u) defined
by (19) can be computed using simple matrix algebra. The algorithm was first proposed in
Rychlik (1988) and is given in a fatigue toolbox FAT, see Frendahl et al. (1993).
Here we face the fact that the exact joint distribution of maxima and minima is unknown
for almost every stationary process with specified distribution. However, specification of a
process distribution is always made under the understanding that it represents a sufficiently
good approximation of the real process in study. Measured loads are often saved in a formof Markov matrices, which give empirical estimators of the transition matrices, and hence a
natural stochastic model for a load, based on this information, is a Markov chain. For
several real loads and theoretical Gaussian and non-Gaussian processes we have observed a
? Board of the Foundation of the Scandinavian Journal of Statistics 1996.
This content downloaded from 194.210.224.251 on Mon, 8 Jul 2013 09:50:07 AMAll use subject to JSTOR Terms and Conditions

7/15/2019 Fatigue and Stochastic Loads_RYCHLIK
http://slidepdf.com/reader/full/fatigue-and-stochastic-loadsrychlik 15/19
400 I. Rychlik ScandJ Statist23
(a) (b)-3 _4
2- 3-
*
2
0-1-1
-2 -2
-o ~ ~ ~ ~ ~ ~ ~ ~ ~ ~~~~-
0 50 100 150 200 250 -4 -2 0 2 4
t trough
Fig. 7. (a) Part of a simulated amplepath of the Duffingoscillatorwith Gaussianwhite noise input Y. (b)
Rainflowcountrfc(Y) (dots).
very good agreement between observed (simulated) and computed oscillations intensities
based on Markov turning points approximation.
Example 4. Duffing oscillator. Consider a simple mechanical system with non-linear
spring, the so-called Duffing oscillator,
Ytt+2SY'_yt +cY3 =UrWt t )0,ttO,
where W, is a Gaussian white noise process. Assume that the differential equation is started
at t = - o and hence Yt is a zero-mean stationary process.
We have simulated Ytwith parameters C= 0.4, c = 0.2, and a2 = 1.6 and in Fig. 7(a) we
present a part of a simulated sample path of Yt.
4
3-
2-
1
20
-2
-3
-4~~~~~~~~4 -2 0 2 4trough (v)
Fig. 8. Isolines of the observed counting distribution NT(V, U) of the rainflow count rfc(Y), where Y is
the solution to the Duffing oscillator (dashed lines) compared with the expected counting distribution
nT(v, u) computed approximately using Markov chain of turning points (solid lines).
? Boardof the Foundation f the Scandinavianournalof Statistics1996.
This content downloaded from 194.210.224.251 on Mon, 8 Jul 2013 09:50:07 AMAll use subject to JSTOR Terms and Conditions

7/15/2019 Fatigue and Stochastic Loads_RYCHLIK
http://slidepdf.com/reader/full/fatigue-and-stochastic-loadsrychlik 16/19
Scand J Statist 23 Fatigue and stochastic loads 401
We have extracted from Y, the sequence of turning points and estimated the transition
matrices from minimum to maximum and maximum to minimum. Next using the assump-
tion that the sequence of turning points forms a Markov chain, with the estimated transition
matrices, we have computed nT(V, u). The isolines of nT(v, u) are presented in Fig. 8 (solid
lines). In order to check the accuracy of the approximation, we have found the rainflow
count rfc(Y), see Fig. 7(b) and computed its counting distribution NT(V, u). The isolines of
NT(V, u) are presented in Fig. 8 (dashed lines). We can see that agreement between nT(V, u)
and NT(V, U) is very good.
4.3. Processes with absolutely continuoussample paths
Let Y, be a random process with a.s. absolutely continuous sample paths. For simplicity we
shall assume that Yt is a strictly stationary and ergodic process. Similarly as for diffusions,
the assumption that one starts to count rainflow cycles at time zero causes some technical
complications. This can be resolved by considering the process Yt, t E R, defining rainflowfunction rfct for t > S and letting S go to - oc. Then the derivative of the damage process
at time t goes to
Dt(f; Y) =(Y)+f2(Xk, Yt), (21)
where x + = max (0, x) and k7 is defined by
X- =inf {Ys: t- A s A t}, t- = sup {s e (-ce, t): Y,> Yt}, (22)
where sup {0} -oo. Now, we can define a stationary expected damage intensity by
d(f; Y) =E[(Yo)+f2(k,xYo)]. (23)
Computation of d(f; Y) is an important problem in fatigue life prediction under random
loading. However the distribution of XO is hard to compute exactly, and hence approxima-
tion methods are often used. If the joint density of minimum and the following maximum is
known (estimated or approximated in a suitable way), then the sequence of turning points of
Y can be approximated by a Markov chain for which expected damage intensity (or n(v, u))
can be easily computed and then used as an approximation of d(f, Y). This approach is used
in example 1.
Assume that Yt is a stationary and ergodic Gaussian process with absolutely continuous
paths. Then one can prove that
NlVm UT = lim nT=VE[(Y,) ( () | Yo= ulfyo(u) = n(v, u), (24)T--+ oc T T- o T
say. (The formula (24) can be extended to some non-Gaussian processes.) As before we can
define an intensity of maxima and rainflow minima by
( 2n(v, u)
Av au
For v =u,
n(u, u) = E[(Y0) +I Yo= u]fyo(u),
which is Rice's formula for the intensity of upcrossings of level u by Yt. Hence (24) is an
extension of Rice's formula to the intensity of excursions from the level u with the global
minimum smaller than v (see Leadbetter et al., 1983).
? Board of the Foundation of the Scandinavian Journal of Statistics 1996.
This content downloaded from 194.210.224.251 on Mon, 8 Jul 2013 09:50:07 AMAll use subject to JSTOR Terms and Conditions

7/15/2019 Fatigue and Stochastic Loads_RYCHLIK
http://slidepdf.com/reader/full/fatigue-and-stochastic-loadsrychlik 17/19
402 I. Rychlik Scand J Statist 23
A useful conservative bound for the oscillation intensity n(v, u), and hence also for the
damage intensity (23), is the following one
n(v,u) <inf{n(z,z): v <z <u},
see Rychlik (1993) for examples and more detailed discussion.
Example I (continued). Finally we give an example of intensity y(v, u) for a more regular
zero mean Gaussian process with the spectrum S(A) = /3/3 if J2A 3//27r and 0 otherwise.
There is no explicit expression for the joint density of the minimum and the following
maximum (m1, Ml) known at present. However, there are accurate algorithms to compute
fmM numerically, based on Slepian model processes and regression methods, see Lindgren &
Rychlik (1991) and Rychlik & Lindgren (1993). In Fig. 9 (left figure) the isolines of
computed f(mM are plotted. The dots mark simulated pairs of minima and maxima for the
load Y. Since higher order densities, e.g. of (ml, Ml, IM2) are practically impossible to
compute and hence the oscillation intensity n(v, u) is unknown, we use the Markov chain of
turning points with transition matrices defined byfmMto approximate the distribution of the
sequence of local extremes in Y. The oscillations intensity for the Markov chain of turning
points n(v, u) is computed and by numerical differentiation we obtain
,u(v, u) = a-2(V, U)
av au
In Fig. 9 (right figure) we have compared fi(v, u) (the approximation for P,(v,u)) with
simulations.
4.4. Varianceof rainflowdamage
The variance of DT is extremely hard to compute even if theoretical formulas can be written
down. In the special case when the damage function f(v, u) = G(u) - G(v) for some abso-
lutely continuous non-decreasing function G we have that DT = G'(Y)1{X x o}(Yt) Ytdt
4 4
3 3
2 2-
CD~~~~~~~~~~~~C)
-2 --2-
-3- -3-
-41 -4-4 -2 0 2 4 -4 -2 0 2 4
trough (v) trough (v)
Fig. 9. Gaussian xamplewithobservedpairsof minimaand maxima left figure)andrainflowpairs right figure)togetherwith isolines of the calculateddensities.
? Board of the Foundation of the Scandinavian Journal of Statistics 1996.
This content downloaded from 194.210.224.251 on Mon, 8 Jul 2013 09:50:07 AMAll use subject to JSTOR Terms and Conditions

7/15/2019 Fatigue and Stochastic Loads_RYCHLIK
http://slidepdf.com/reader/full/fatigue-and-stochastic-loadsrychlik 18/19
Scand J Statist 23 Fatigue and stochastic loads 403
and the variance of DT can be numerically computed for stationary Gaussian process Y.
Further in Rychlik et al. (1995) and Piterbarg & Rychlik (1994) we discuss variance of DT
and the CLF for DT(Y), Y is Gaussian, as T goes to infinity. However, often the variabiilty
of material quality, described by a random critical levelK,
dominates thevariability
ofthedamage DT and hence for reliability statements, the expected damage E[DT] is the most
important parameter.
5. Generationof loads for fatigue testing
In previous sections we presented a simple mathematical model for fatigue life time
variability. The material quality was described by a simple random variable K while the load
was represented as a rainflow count or oscillation measure. The method is mostly used at the
design stage when the accuracy of fatigue life time predictions is less important but the
experiments have to be relatively cheap.
However, if the material strength has to be better defined one needs to perform fatiguetests on components or whole constructions under variable amplitude stress or elongation
processes. To perform "variable-amplitude" fatigue tests one needs suitable methods to
generate stress functions y. Often one uses so-called standard load spectra, which are
deterministic functions created from measurements of the loads and considered as represen-
tative for particular service conditions. Simulated sample paths of random processes have
been also used, giving some statistical properties (estimated in real loads) relevant for fatigue.
We shall briefly discuss three approaches.
1. The simplest important characteristic of the load is the intensity of upcrossing
n(u, u), u E R and some measure of irregularityof a load, e.g. the proportion of intensities
of local maxima and upcrossings of a mean level. An algorithm generating a sample pathof a random process with predescribed crossing intensity and irregularity factor was
presented by Holm & de Mare (1985). It should be noted that the crossing intensity is
a very weak restriction and the class of processes with given crossing intensity is very
wide. However, the algorithm proposed simulates a load from a relatively narrow
subclass of stochastic processes.
2. A more complete information on the structure of the load is given by the Markov matrix,
i.e. the histogram of local minima and the following maxima in the sequence of turning
points. (Such matrices are often calculated from real loads.) From a Markov matrix one
can obtain crossing spectrum n(u, u) by simple algebra. Since the higher dimensional
distributions of the sequence of turning points is unknown one uses a Markov chain with
transition matrices estimated from the Markov matrix (after suitable removals of small
oscillations) to simulate inputs to fatigue tests.
3. It is commonly believed that the rainflow count is an important characteristicof the load,
particularly relevant for fatigue analysis and hence the real loads are often described in
terms of rainflow matrices. Consequently, in fatigue tests one wishes to invert the
rainflow matrix and obtain the sequence of turning points. In statistical terms one wants
to simulate the load with given oscillations intensity n(v, u). Such an algorithm was
proposed by Kruger et al. (1985). Their algorithm chooses, with equal probability, a
sequence of turning points which gives exactly the required rainflow matrix.
Acknowledgements
I would like to thank Professor Georg Lindgren for his support and encouragement in my
research on random fatigue. The paper is based directly on an invited talk at the 15th Nordic
?) Board of the Foundation of the Scandinavian Journal of Statistics 1996.
This content downloaded from 194.210.224.251 on Mon, 8 Jul 2013 09:50:07 AMAll use subject to JSTOR Terms and Conditions

7/15/2019 Fatigue and Stochastic Loads_RYCHLIK
http://slidepdf.com/reader/full/fatigue-and-stochastic-loadsrychlik 19/19
404 I. Rychlik Scand J Statist 23
Conference on Mathematical Statistics in Lund 1994. I am also very grateful to Professor
Dag Tjostheim for discussion and valuable comments improving the manuscript.
ReferencesBrokate, M., DreBler, K. & Krejci, P. (1994). Rainflow counting and energy dissipation for hysteresis
models in elastoplasticity. Eur. J. Mech. A/Solids, 1-30, to appear.
Freedman, D, (1983). Brownian motion and diffusion, Springer, New York.
Frendahl, M., Lindgren, G. & Rychlik, I. (1993). Fatigue analysis toolbox. Department of Mathematical
Statistics, University of Lund.
Holm, S. & de Mare, J. (1985). Generation of random processes for fatigue testing. Stochast. Process.
Applic.20, 149-156.Kruger, W., Scheutzow, M., Beste, A. & Petersen, J. (1985). Markov- und Rainflowrekonstruktion
stochastischer Beanspruchungszeitfunktionen, VDI-Report, series 18, No. 22. (In German).
Leadbetter, M. R., Lindgren, G. & Rootz&n, H. (1983). Extremes and related properties of random
sequences and processes. Springer, New York.
Lindgren, G. & Rychlik, I. (1991). Slepian models and regression approximations in crossing andextreme value theory. Int. Statist. Rev. 59, 195-225.
Matsuishi, M. & Endo, T. (1968). Fatigue of metals subject to varying stress. Paper presented to Japan
Society of Mechanical Engineers, Jukvoka, Japan.
Miller, K. J. (1993). Materials science perspective of metal fatigue resistance. Mater. Sci. Technol. 9,
453-462.
Miner, M. A. (1945). Cumulative damage in fatigue. J. Appl. Mech. 12, A159-A164.
Murakami, Y. (ed.) (1992). The rainflowmethod infatigue. Butterworth-Heinemann, Oxford.
Palmgren, A. (1924). Die Lebensdauer von Kugellagern. VDI-Zeitschrift 68, 339-341.
Piterbarg, V. & Rychlik, I. (1994). Central limit theorem for wave-functionals of Gaussian processes.
Univ. of Lund Statis. Res. Rep. No. 1994: 4, 1-26.
Rychlik, I. (1987). A new definition of the rainflow cycle counting method. Int. J. Fatigue, 9, 119-121.
Rychlik, I. (1988). Rainflow cycle distribution for ergodic load processes. SIAM J. Appl. Math. 48,
662-679.
Rychlik, I. (1993). Note on cycle counts in irregular loads. Fatigue Fract. Engng Mater. Struct. 16,
377-390.
Rychlik, I. (1994). Extremes, rainflow cycles and damage functionals in continuous random processes.
Univ. of Lund Statis. Res. Rep. No. 1994: 9, 1-28.
Rychlik, I. & Lindgren, G. (1993). CROSSREG-a technique for first passage and wave density
analysis. Probab. Engng Informational Sci. 7, 125-148.
Rychlik, I., Lindgren, G. & Lin, Y. K. (1995). Markov based correlations of damage cycles in Gaussian
and non-Gaussian loads. Probab. Engng Mech. 10, 103-115.
Scheutzow, M. (1994). A low of large numbers of upcrossing measures. Stochast. Process. Applic. 53,
285-305.
Sobczyk, K. (1987). Stochastic models for fatigue damage of materials. Adv. Appl. Probab. 19, 652-673.
Sobczyk, K. & Spencer,B. F.
Jr. (1992).Random
fatigue: fromdata to
theory,Academic Press, New
York.
Received November 1994, infinal form November 1995
Igor Rychlik, Department of Mathematical Statistics, University of Lund, Box 118, S-22100 Lund,
Sweden.
? Board of the Foundation of the Scandinavian Journal of Statistics 1996.