
FAKULTI KEJURUTERAAN ELEKTRONIK & KEJURUTERAAN...
20
1 SUBJECT : CONTROL PRINCIPLES BEKG 2323 F FA AK KU UL LT TI I K KE EJ J U UR RU UT TE ER RA AA AN N E EL LE EK K T TR RO ON NI I K K & & K KE EJ J U UR RU UT TE ER RA AA AN N K KO OM MP PU UT TE ER R CHAPTER 2 : MODELING IN THE FREQUENCY DOMAIN Objectives Students should be able to: Review Laplace Transform Find a mathematical model, called a transfer function for linear, time invariant electrical and mechanical systems 2.1 Introduction Step in built up a control systems:- Obtaining system’s schematic (block diagram) Develop mathematical models from schematics of physical system The methods that have been used are:- 1. transfer functions in frequency domain (chapter 2) 2. state equations in the time domain (chapter 3) 2.2 Laplace Transform Review System represented by DE is difficult to model as block diagram. Thus, LT is used. By LT input, output and system can be represented separately. The LT is defined as 0 ) ( ) ( )] ( [ dt e t f s F t f L st (Eq 2.1) where s = jw , a complex variable.
Transcript of FAKULTI KEJURUTERAAN ELEKTRONIK & KEJURUTERAAN...

1
SUBJECT : CONTROL PRINCIPLES BEKG 2323 FFAAKKUULLTTII KKEEJJUURRUUTTEERRAAAANN EELLEEKKTTRROONNIIKK && KKEEJJUURRUUTTEERRAAAANN KKOOMMPPUUTTEERR
CHAPTER 2 : MODELING IN THE FREQUENCY DOMAIN
Objectives
Students should be able to:
Review Laplace Transform
Find a mathematical model, called a transfer function for linear, time
invariant electrical and mechanical systems
2.1 Introduction
Step in built up a control systems:-
Obtaining system’s schematic (block diagram)
Develop mathematical models from schematics of physical system
The methods that have been used are:-
1. transfer functions in frequency domain (chapter 2)
2. state equations in the time domain (chapter 3)
2.2 Laplace Transform Review
System represented by DE is difficult to model as block diagram. Thus, LT is
used. By LT input, output and system can be represented separately.
The LT is defined as
0
)()()]([ dtetfsFtfL st (Eq 2.1)
where s = jw , a complex variable.

2
SUBJECT : CONTROL PRINCIPLES BEKG 2323 FFAAKKUULLTTII KKEEJJUURRUUTTEERRAAAANN EELLEEKKTTRROONNIIKK && KKEEJJUURRUUTTEERRAAAANN KKOOMMPPUUTTEERR
Using Eq 2.1, it is possible to derive a table relating f(t) to F(s) for specific
cases as shown in Table 2.1.
In addition to the Laplace Transform table (Table 2.1), we can use
Laplace Transform theorems, listed in Table 2.2, to assist in transforming
between f(t) to F(s) and F(s) to f(t) or we called as Inverse Laplace
Transform.
Table 2.1

3
SUBJECT : CONTROL PRINCIPLES BEKG 2323 FFAAKKUULLTTII KKEEJJUURRUUTTEERRAAAANN EELLEEKKTTRROONNIIKK && KKEEJJUURRUUTTEERRAAAANN KKOOMMPPUUTTEERR
Table 2.2

4
SUBJECT : CONTROL PRINCIPLES BEKG 2323 FFAAKKUULLTTII KKEEJJUURRUUTTEERRAAAANN EELLEEKKTTRROONNIIKK && KKEEJJUURRUUTTEERRAAAANN KKOOMMPPUUTTEERR
Ex 2.1
Find the Laplace transform of f(t) = Ae-atu(t).
Answer : F(s) = asA
Ex 2.2
Find the Laplace tranform of ydtdy
dtyd
dtydty 453)( 2
2
3
3
Answer : Y(s) = s3Y(s) + 3s2Y(s) + 5sY(s) + 4 Y(s)
Ex 2.3
Find the inverse Laplace transform of F(s) = 1/(s+3)2
Answer : f(t) = e-3ttu(t)
2.3 The Transfer Function
The transfer function is the ratio of the Laplace transform of the output of a
system to the Laplace transform of the input. As a example, the transfer
function, G(s) for a system representation in Figure 2.1 is )()(
sRsC
A general nth order, linear, time-invariant differential equation is
)(...)()(
)(...)()(
01
1
1
01
1
1
trbdt
trdbdt
trdb
tcadt
tcdadt
tcda
m
m
mm
m
m
n
n
nn
n
n

5
SUBJECT : CONTROL PRINCIPLES BEKG 2323 FFAAKKUULLTTII KKEEJJUURRUUTTEERRAAAANN EELLEEKKTTRROONNIIKK && KKEEJJUURRUUTTEERRAAAANN KKOOMMPPUUTTEERR
where : c(t) is output
r(t) is input
a and b are constants
Taking Laplace transform of both side,
ansnC(s) + an-1sn-1C(s) +… + a0C(s) + initial condition =
bmsmR(s) + bm-1sm-1R(s) +… + b0R(s) + initial condition
Assume all initial conditions are zero,
(ansn + an-1sn-1 +… + a0) C(s) = (bmsm + bm-1sm-1 +… + b0) R(s)
Therefore, the transfer function is
It separate output, input and system.
The transfer function can be represented as a block diagram as shown in
Figure 2.2.
Figure 2.2
Ex 2.4 Find the transfer function represented by
)()(2)( trtcdt
tdc
(bmsm + bm-1sm-1 +… + b0)
(ansn + an-1sn-1 +… + a0) = G(S) =
C(s)
R(s)

6
SUBJECT : CONTROL PRINCIPLES BEKG 2323 FFAAKKUULLTTII KKEEJJUURRUUTTEERRAAAANN EELLEEKKTTRROONNIIKK && KKEEJJUURRUUTTEERRAAAANN KKOOMMPPUUTTEERR
Sol Taking LT both side (refer Table 2.1 and 2.2), and assume zero initial condition
2s1
R(s)C(s)G(s)
R(s)2C(s)sC(s)
Ex 2.5 Use the results of ex 2.4 to find the response, c(t) to an input r(t)=u(t), a unit step. Assume zero initial condition.
Answer: tetc 2
21
21)(
Ex 2.6 Find the transfer function, G(s) corresponding to differential equation
rdtdr
dtrdc
dtdc
dtcd
dtcd 34573 2
2
2
2
3
3
Answer
57s3ss34ssG(s) 23
2
Ex 2.7 Find the differential equation corresponding to the transfer function.
2612)( 2
ssssG
Answer
)()(2)(2)(6)(2
2
trdt
tdrtcdt
tdcdt
tcd
Ex 2.8 Find the ramp response for a system whose transfer function is

7
SUBJECT : CONTROL PRINCIPLES BEKG 2323 FFAAKKUULLTTII KKEEJJUURRUUTTEERRAAAANN EELLEEKKTTRROONNIIKK && KKEEJJUURRUUTTEERRAAAANN KKOOMMPPUUTTEERR
)8)(4()(
ssssG
Answer
tt eetc 84
321
161
321)(
In general, physical system that can be represented by a linear, time invariant and differential equation, can be modeled as a transfer function.
2.4 ELECTRIC NETWORK TRANSFER FUNCTION
Apply transfer function to mathematical modeling of electrical circuit
including passive Network
Equivalent circuits for the electric networks that we work with first consist
of three passive linear components: resistors, capacitors and inductors.
Table 2.3 summarizes the components and the relationships between voltage
and current and between current and charge under zero initial conditions.
From these relationships, we can write the differential equations for the
circuit using Khirchhoff’s laws.
Then we can take the Laplace transforms of the differential equations and
finally solve for the transfer function.

8
SUBJECT : CONTROL PRINCIPLES BEKG 2323 FFAAKKUULLTTII KKEEJJUURRUUTTEERRAAAANN EELLEEKKTTRROONNIIKK && KKEEJJUURRUUTTEERRAAAANN KKOOMMPPUUTTEERR
Or we can use transform methods:
1. loop or mesh analysis – Kirchhoff’s voltage law
2. nodal analysis – Kirchhoff’s current law
Table 2.3
Simple, Single-loop Electrical Network
1. mesh analysis
– via the differential equation (Ex 2.9)
– via transform method (Ex 2.10)
2. nodal analysis
– via transform method (Ex 2.11)
Ex 2.9
Find the transfer function relating the capacitor voltage, VC(s) to the input
voltage, V(s), in Figure 2.3.

9
SUBJECT : CONTROL PRINCIPLES BEKG 2323 FFAAKKUULLTTII KKEEJJUURRUUTTEERRAAAANN EELLEEKKTTRROONNIIKK && KKEEJJUURRUUTTEERRAAAANN KKOOMMPPUUTTEERR
Figure 2.3
Answer:
LCs
LRs
LCsVsVC
1/1
)()(
2
Ex 2.10
Repeat example 2.9 using mesh analysis and transform methods without
writing a differential equation.
Ex 2.11
Repeat example 2.9 using nodal analysis and transform methods without
writing a differential equation.
Complex Circuits
1. mesh analysis
– via transform method (Ex 2.12)
2. nodal analysis
– via transform method (Ex 2.13)
Ex 2.12
Given the network of Figure 2.4, find the transfer function, I2(s) / V(s).

10
SUBJECT : CONTROL PRINCIPLES BEKG 2323 FFAAKKUULLTTII KKEEJJUURRUUTTEERRAAAANN EELLEEKKTTRROONNIIKK && KKEEJJUURRUUTTEERRAAAANN KKOOMMPPUUTTEERR
Figure 2.4
Answer:
1212
21
22
)()()()()(
RsLCRRLCsRRLCs
sVsIsG
We notice that we can use these equations:
Ex 2.13
Find the transfer function, VC(s)/V(s), for the circuit in Figure 2.4.
Answer:
LCGs
LCCLGGsGG
sCGG
sVsV C
221221
21
)()()(
where G1 = 1/R1 and G2 = 1/R2
Sum of Impedances
around Mesh 1 I1(s) _
Sum of Impedances
common to the two meshes
I2(s) = Sum of applied voltages around
Mesh 1
Sum of Impedances
around Mesh 2 I2(s) _
Sum of Impedances
common to the two meshes
I1(s) = Sum of applied voltages around
Mesh 2 +
11
SUBJECT : CONTROL PRINCIPLES BEKG 2323 FFAAKKUULLTTII KKEEJJUURRUUTTEERRAAAANN EELLEEKKTTRROONNIIKK && KKEEJJUURRUUTTEERRAAAANN KKOOMMPPUUTTEERR
We notice that we can use these equations:
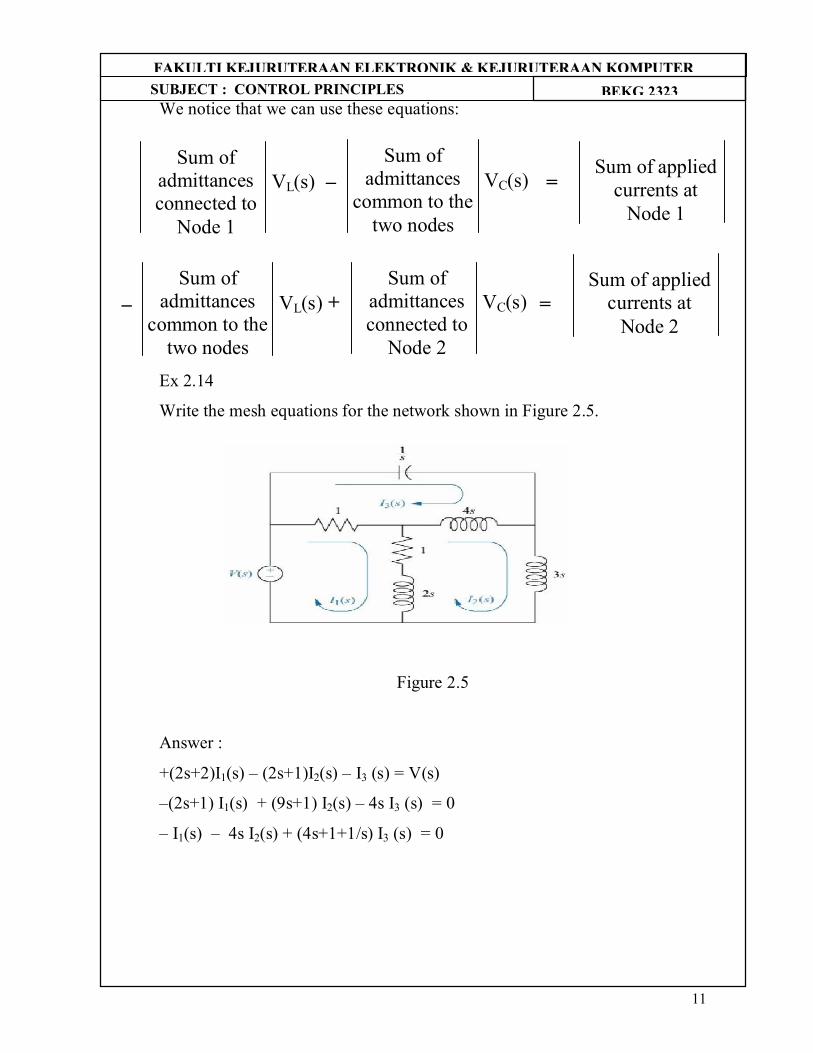
Ex 2.14
Write the mesh equations for the network shown in Figure 2.5.
Figure 2.5
Answer :
+(2s+2)I1(s) – (2s+1)I2(s) – I3 (s) = V(s)
–(2s+1) I1(s) + (9s+1) I2(s) – 4s I3 (s) = 0
– I1(s) – 4s I2(s) + (4s+1+1/s) I3 (s) = 0
Sum of admittances connected to
Node 1
VL(s) _ Sum of
admittances common to the
two nodes
VC(s) = Sum of applied
currents at Node 1
Sum of admittances connected to
Node 2
VC(s) _ Sum of
admittances common to the
two nodes
VL(s) = Sum of applied
currents at Node 2
+

12
SUBJECT : CONTROL PRINCIPLES BEKG 2323 FFAAKKUULLTTII KKEEJJUURRUUTTEERRAAAANN EELLEEKKTTRROONNIIKK && KKEEJJUURRUUTTEERRAAAANN KKOOMMPPUUTTEERR
2.5 TRANSLATIONAL MECHANICAL SYSTEM TRANSFER
FUNCTIONS
We have shown that electrical networks can be modeled by a transfer
function.
Now we will do the same for mechanical systems.
Mechanical systems, like electrical network, can be have 3 passive, linear
components. Two of them, the spring and the mass, are energy-storage
elements; and one of them, the viscous damper, dissipates energy.
These mechanical elements are shown in Table 2.4.
In the table, K, fv and M are called spring constant, coefficient of viscous
friction and mass, respectively.
We now create analogies between electrical and mechanical systems by
comparing Table 2.3 and 2.4.
Figure 2.10(a) shows a similar to the simple RLC network. This simple
mechanical system requires just one differentiate equation, called the
equation of motion. Figure 2.10(b) shows the block diagram.
Figure 2.10
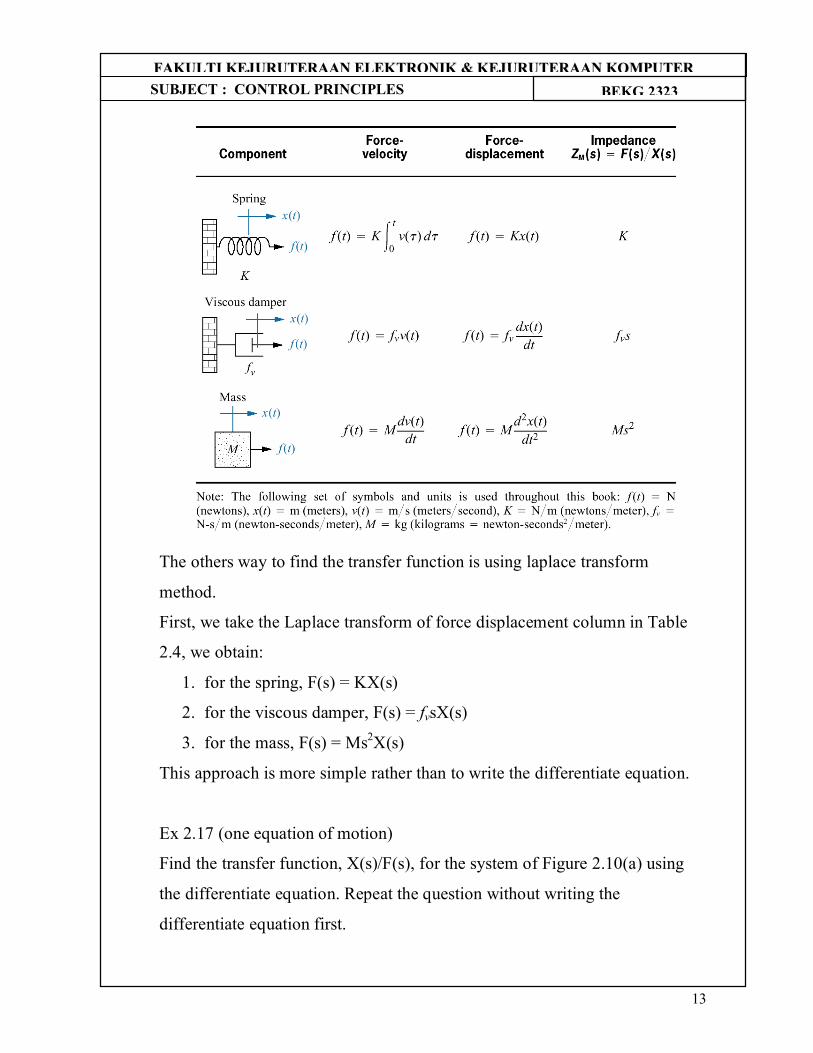
TABLE 2.4: Force-velocity, force-displacement, and impedance translational relationships for springs, viscous dampers, and mass.
13
SUBJECT : CONTROL PRINCIPLES BEKG 2323 FFAAKKUULLTTII KKEEJJUURRUUTTEERRAAAANN EELLEEKKTTRROONNIIKK && KKEEJJUURRUUTTEERRAAAANN KKOOMMPPUUTTEERR
The others way to find the transfer function is using laplace transform
method.
First, we take the Laplace transform of force displacement column in Table
2.4, we obtain:
1. for the spring, F(s) = KX(s)
2. for the viscous damper, F(s) = fvsX(s)
3. for the mass, F(s) = Ms2X(s)
This approach is more simple rather than to write the differentiate equation.
Ex 2.17 (one equation of motion)
Find the transfer function, X(s)/F(s), for the system of Figure 2.10(a) using
the differentiate equation. Repeat the question without writing the
differentiate equation first.

14
SUBJECT : CONTROL PRINCIPLES BEKG 2323 FFAAKKUULLTTII KKEEJJUURRUUTTEERRAAAANN EELLEEKKTTRROONNIIKK && KKEEJJUURRUUTTEERRAAAANN KKOOMMPPUUTTEERR
Answer:
KsfMssFsX
v 2
1)()(
Ex 2.18 (2 degrees of freedom)
Find the transfer function, X2(s)/F(s), for the system of Figure 2.11(a) as
shown below.
Figure 2.11
Solution
First, we take the Laplace transform of force displacement.
Then, find all forces on M1. We can draw the transformed free-body diagram
as shown below.
The LT of the equation of motion can be written as:
(M1s2 + (fv1 + fv2)s + (K1 + K2)) X1(s) – (fv3s + K2)X2(s) = F(s)

15
SUBJECT : CONTROL PRINCIPLES BEKG 2323 FFAAKKUULLTTII KKEEJJUURRUUTTEERRAAAANN EELLEEKKTTRROONNIIKK && KKEEJJUURRUUTTEERRAAAANN KKOOMMPPUUTTEERR
Then, find all forces on M2. We can draw the transformed free-body diagram
as shown below.
The LT of the equation of motion:-
– (fv3s + K2)X1(s) + ((M2s2 + (fv2 + fv3)s + (K2 + K3))X2(s) = 0
Then to find the TF, X(s)/F(s), we use cramer’s rule.
Notice again, the equations are similar to electrical mesh equation.
From now on we use this approach.
Sum of Impedances connected to the motion at
X1
X1(s) _
Sum of Impedances between X1
and X2
X2(s) = Sum of applied
forces at X1
_ Sum of
Impedances connected to the motion at
X2
X2(s) Sum of
Impedances between X1
and X2
X1(s) = Sum of applied
forces at X2 +

16
SUBJECT : CONTROL PRINCIPLES BEKG 2323 FFAAKKUULLTTII KKEEJJUURRUUTTEERRAAAANN EELLEEKKTTRROONNIIKK && KKEEJJUURRUUTTEERRAAAANN KKOOMMPPUUTTEERR
Exercise 1
Find the TF, G(s) = X2(s)/F(s), for the translational mechanical system shown
in Figure 2.12.
Figure 2.12
Answer:
)157(13
)()(
232
ssss
ssFsX
2.6 ROTATIONAL MECHANICAL SYSTEM TRANSFER
FUNCTIONS
Rotational mechanical systems are handled the same way as translational
mechanical systems, except that torque replaces force and angular replaces
translational displacement.
Table 2.5 shows the components along with the relationships between torque
and angular velocity, as well as angular displacemanet.
Notice that the symbols for the components look the same as translational
symbols, but they are undergoing rotation and no translation.
The values of K, D and J are called spring constant, coefficient of viscous
friction and moment of inertia, respectively.

17
SUBJECT : CONTROL PRINCIPLES BEKG 2323 FFAAKKUULLTTII KKEEJJUURRUUTTEERRAAAANN EELLEEKKTTRROONNIIKK && KKEEJJUURRUUTTEERRAAAANN KKOOMMPPUUTTEERR
Table 2.5 Torque-angular velocity, torque-angular displacement,
and impedance rotational relationships for springs, viscous dampers, and inertia
Ex 2.19
Find the transfer function, )(/)(2 sTs , for the rotational system shown in
the Figure 2.13(a). The rod is supported by bearings at either end and is
undergoing torsion. A torque is applied at the left, and the displacement is
measured at the right.
18
SUBJECT : CONTROL PRINCIPLES BEKG 2323 FFAAKKUULLTTII KKEEJJUURRUUTTEERRAAAANN EELLEEKKTTRROONNIIKK && KKEEJJUURRUUTTEERRAAAANN KKOOMMPPUUTTEERR
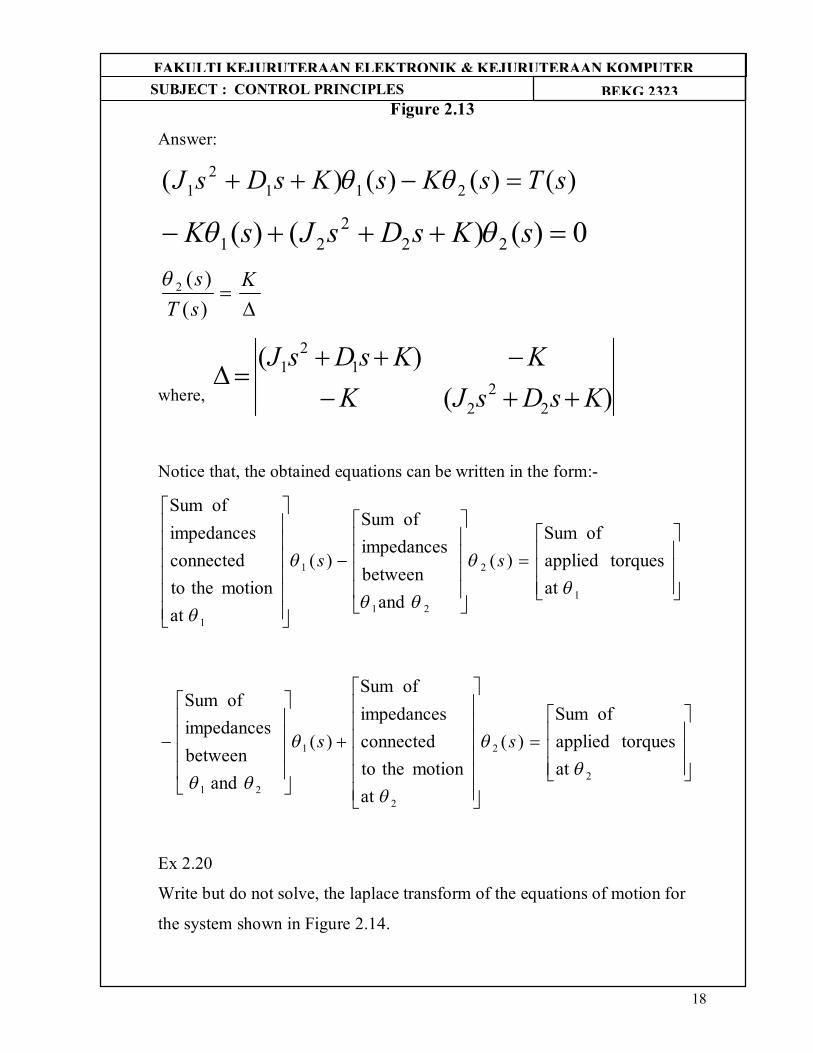
Figure 2.13
Answer:
)()()()( 2112
1 sTsKsKsDsJ
0)()()( 222
21 sKsDsJsK
KsTs)()(2
where, )()(
22
2
12
1
KsDsJKKKsDsJ
Notice that, the obtained equations can be written in the form:-
1
2
21
1
1
at torquesapplied
of Sum)(
andbetweenimpedances
of Sum
)(
at motion theto
connectedimpedances
of Sum
ss
2
2
2
1
21
at torquesapplied
of Sum)(
at motion theto
connectedimpedances
of Sum
)(
and betweenimpedances
of Sum
ss
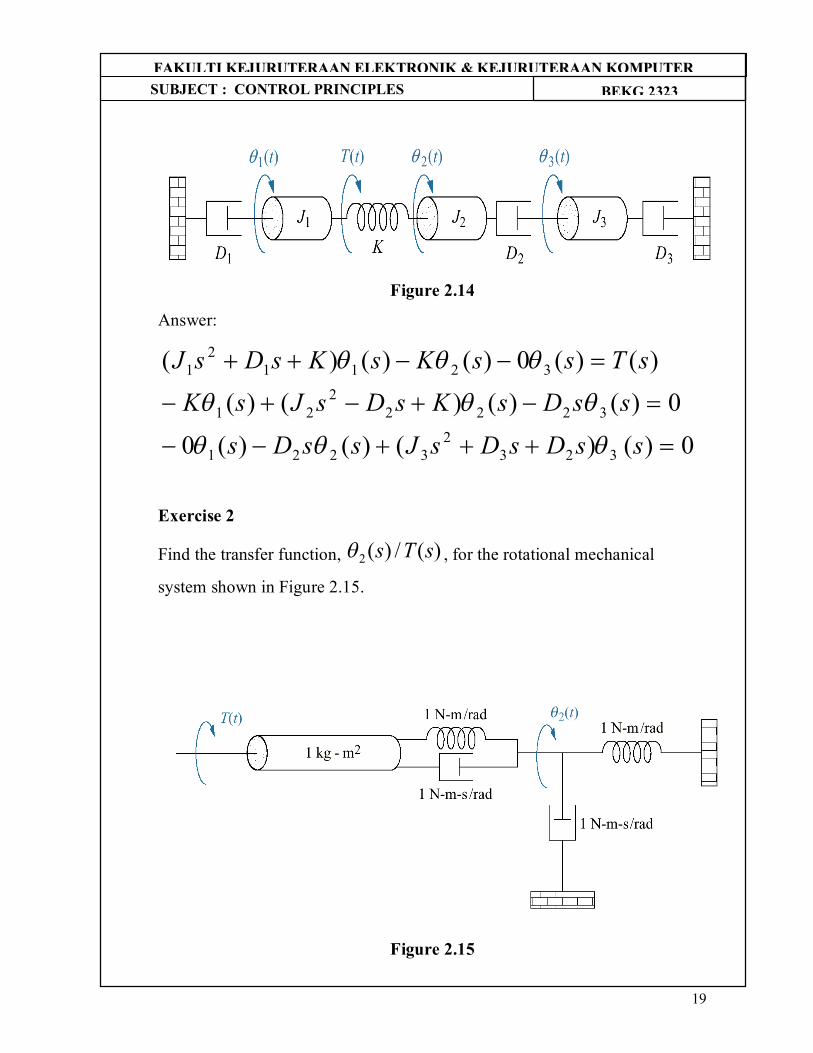
Ex 2.20
Write but do not solve, the laplace transform of the equations of motion for
the system shown in Figure 2.14.
19
SUBJECT : CONTROL PRINCIPLES BEKG 2323 FFAAKKUULLTTII KKEEJJUURRUUTTEERRAAAANN EELLEEKKTTRROONNIIKK && KKEEJJUURRUUTTEERRAAAANN KKOOMMPPUUTTEERR
Figure 2.14
Answer:
0)()()()(0
0)()()()(
)()(0)()()(
3232
3221
32222
21
32112
1
ssDsDsJssDs
ssDsKsDsJsKsTssKsKsDsJ
Exercise 2
Find the transfer function, )(/)(2 sTs , for the rotational mechanical
system shown in Figure 2.15.
Figure 2.15

20
SUBJECT : CONTROL PRINCIPLES BEKG 2323 FFAAKKUULLTTII KKEEJJUURRUUTTEERRAAAANN EELLEEKKTTRROONNIIKK && KKEEJJUURRUUTTEERRAAAANN KKOOMMPPUUTTEERR
Answer:
121
)()(
)( 22
sssTs
sG


















