Extreme Elevation on a 2- Manifold Pankaj K. Agarwal Joint Work with H. Edelsbrunner, J. Harer, Y....
41
Extreme Elevation on a 2- Manifold Pankaj K. Agarwal Joint Work with H. Edelsbrunner, J. Harer, Y. Wang Duke University
-
Upload
lindsey-mccormick -
Category
Documents
-
view
215 -
download
2
Transcript of Extreme Elevation on a 2- Manifold Pankaj K. Agarwal Joint Work with H. Edelsbrunner, J. Harer, Y....
Extreme Elevation on a 2-Manifold
Pankaj K. Agarwal
Joint Work with H. Edelsbrunner, J. Harer, Y. Wang
Duke University
Protein-Protein Docking
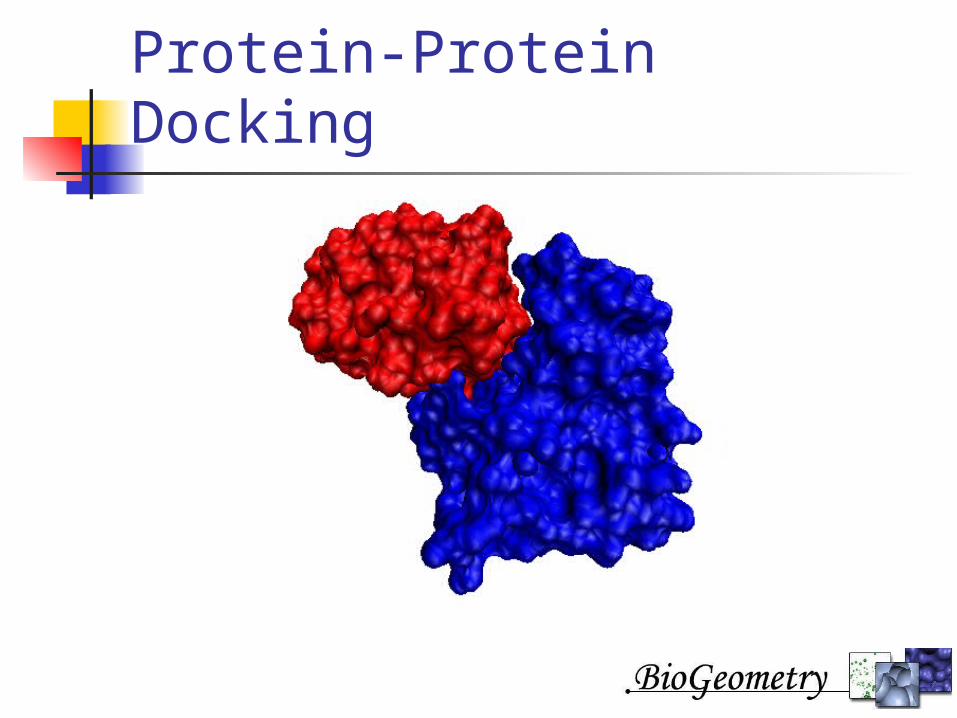
Sample Protein Complexes
1A22 1JLT 3HLA
Docking
Earlier methods: Lenhof, Nussinov and Wolfson (Tel Aviv ), Kuntz
et al (UC San Diego), Singh and Brutlag (Stanford)
Famous softwares: DOCK (Kuntz), AutoDock (Olson), Zdock (Wen)
More Protein-protein docking: 3D-Dock, HEX, DOT, GRAMM, PPD, BIGGER
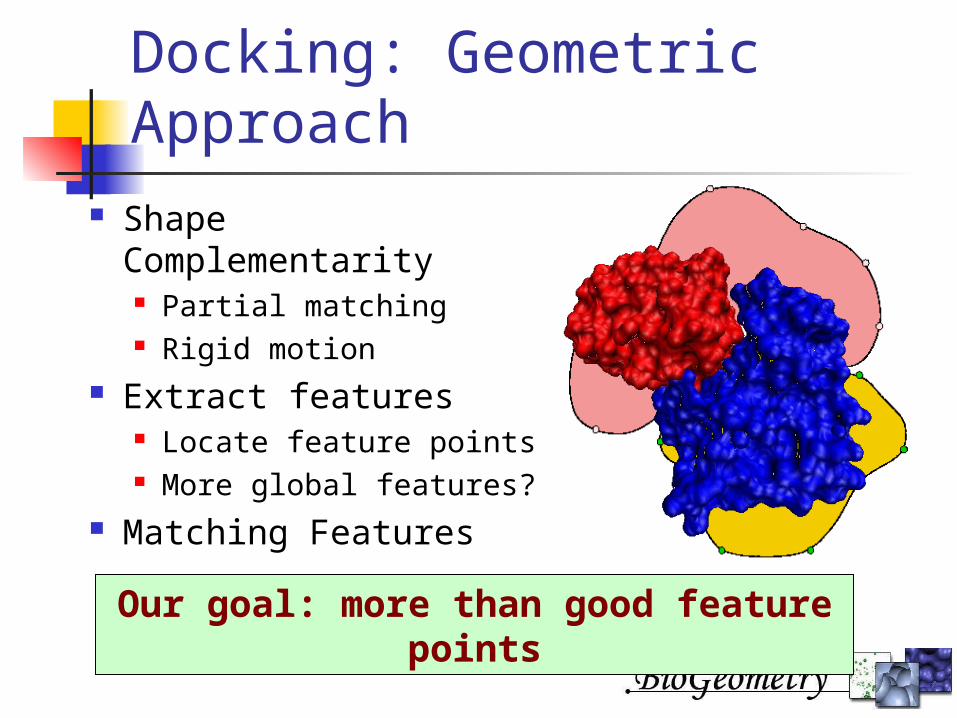
Docking: Geometric Approach
Shape Complementarity Partial matching Rigid motion
Extract features Locate feature points More global features?
Matching Features
Our goal: more than good feature points
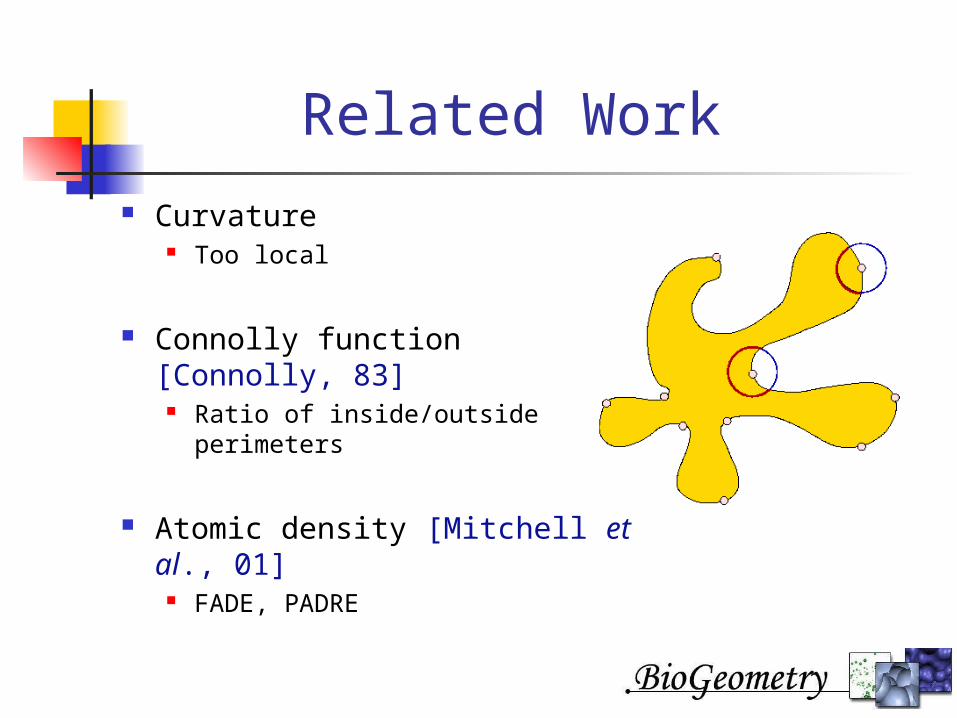
Related Work Curvature
Too local
Connolly function [Connolly, 83]
Ratio of inside/outside perimeters
Atomic density [Mitchell et al., 01]
FADE, PADRE
Our Results
Elevation function Maxima of elevation Associated with feature
Results being applied to docking Shape-matching algorithms Plugging into local-improvement algorithms
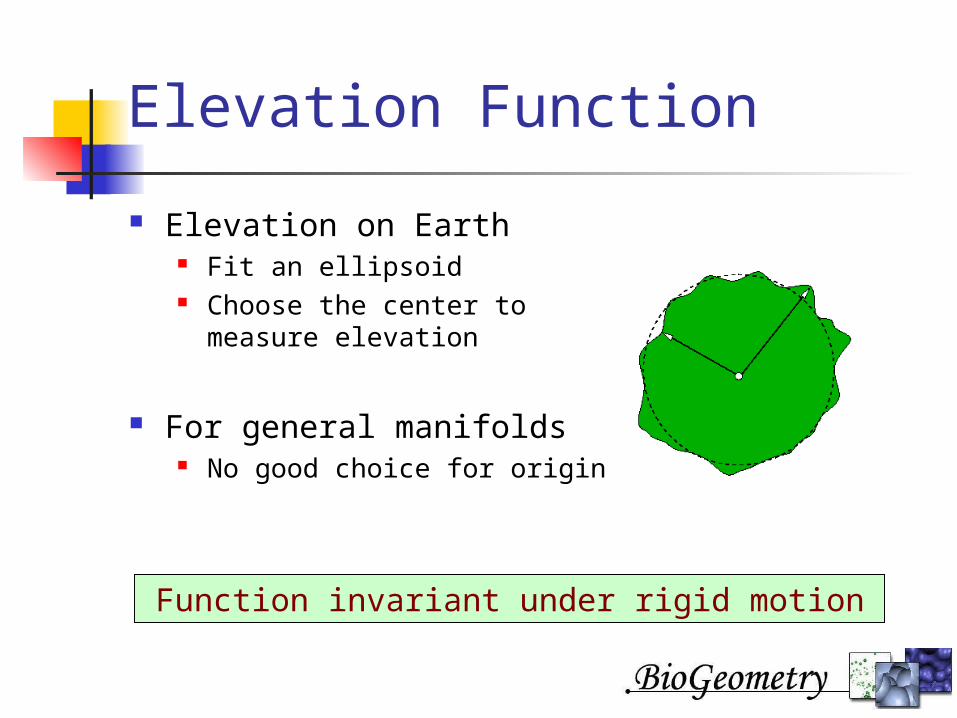
Elevation Function
Elevation on Earth Fit an ellipsoid Choose the center to measure
elevation
For general manifolds No good choice for origin
Function invariant under rigid motion
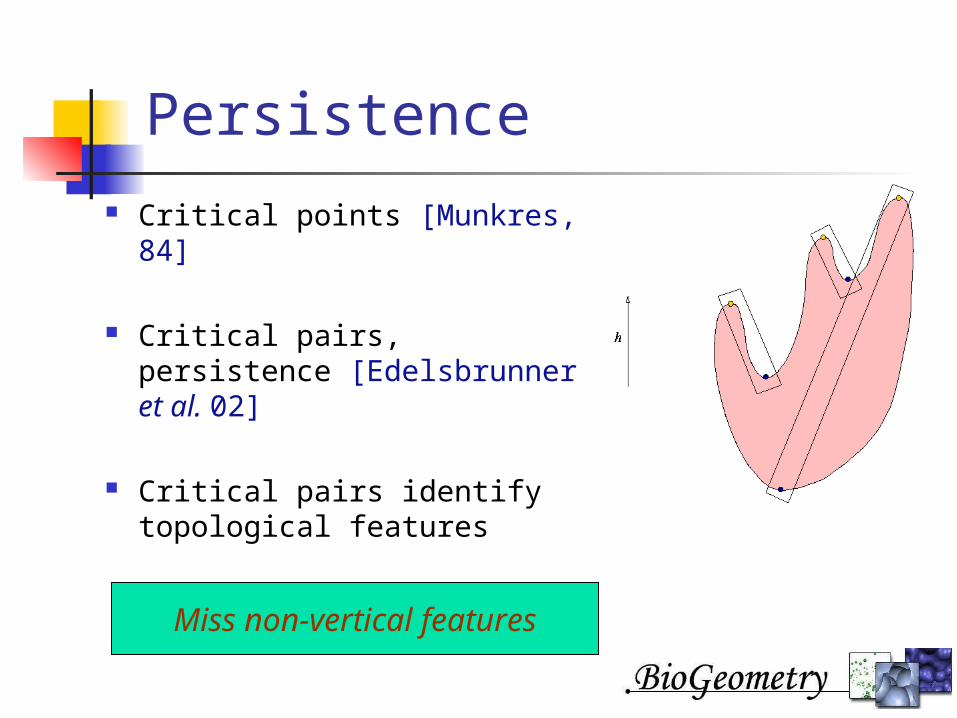
Persistence Critical points [Munkres, 84]
Critical pairs, persistence [Edelsbrunner et al. 02]
Critical pairs identify topological features
Miss non-vertical features
Family of Height Functions
Fix an arbitrary origin
Given u S2, define hu : M R , as hu(x) = <x, u>
H : M x S2 R : a family of height functions
H(x, u) = hu(x)
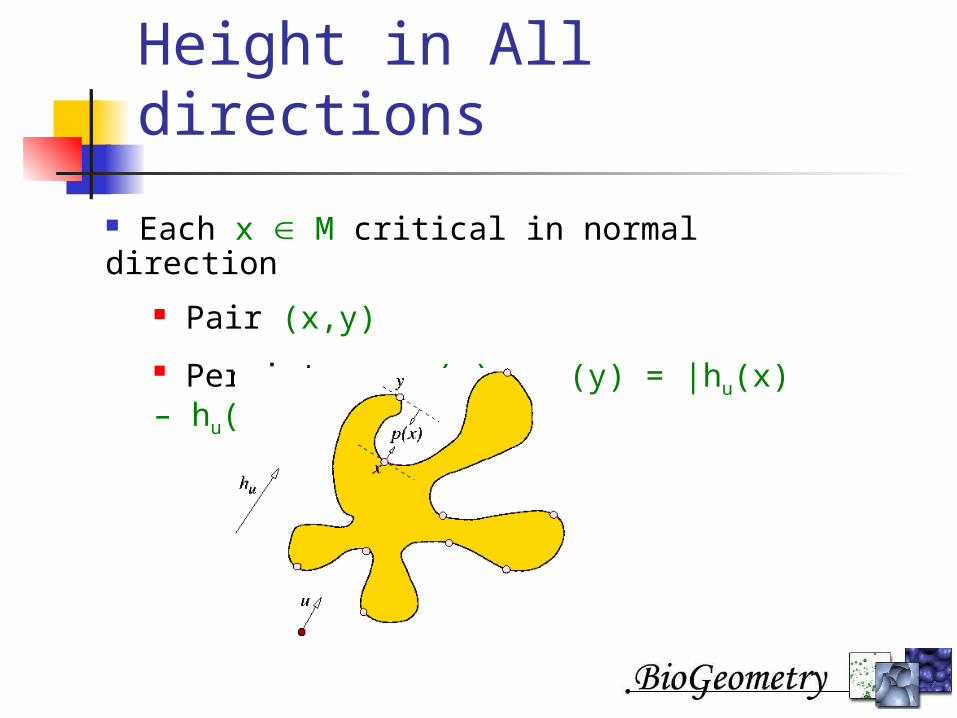
Height in All directions
Each x M critical in normal direction
Pair (x,y)
Persistence p(x) = p(y) = |hu(x) – hu(y)|
Elevation
Define E : M R as E(x) = p(x)
Interested in max of E Each x M captures feature in its normal direction E(x) indicates size of feature
However, E is not everywhere continuous
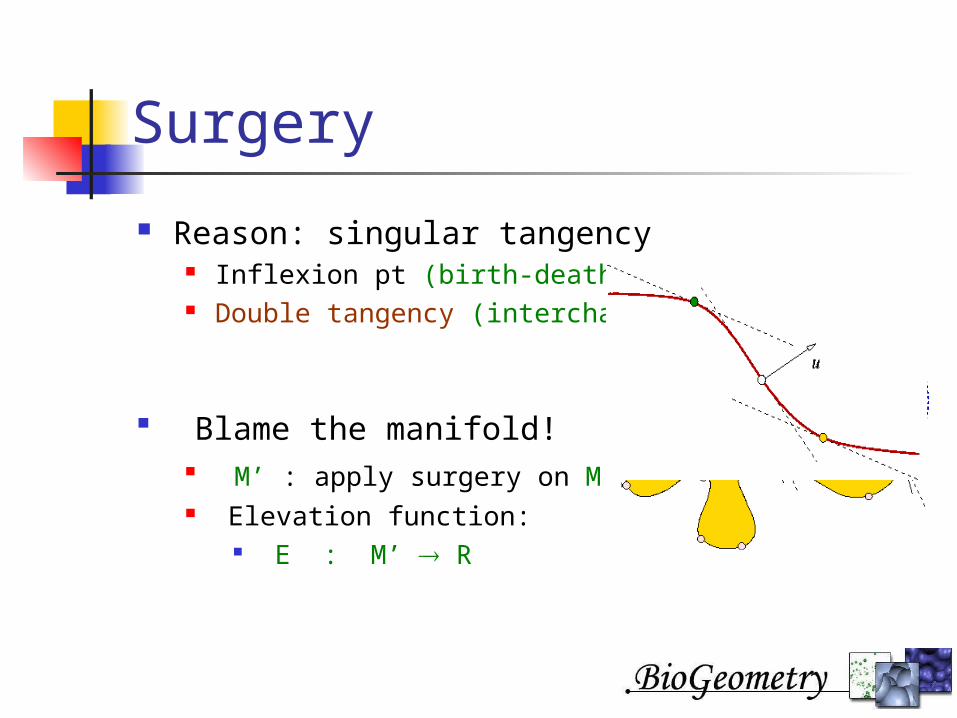
Surgery
Reason: singular tangency Inflexion pt (birth-death pt) Double tangency (interchange)
Blame the manifold! M’ : apply surgery on M Elevation function:
E : M’ R
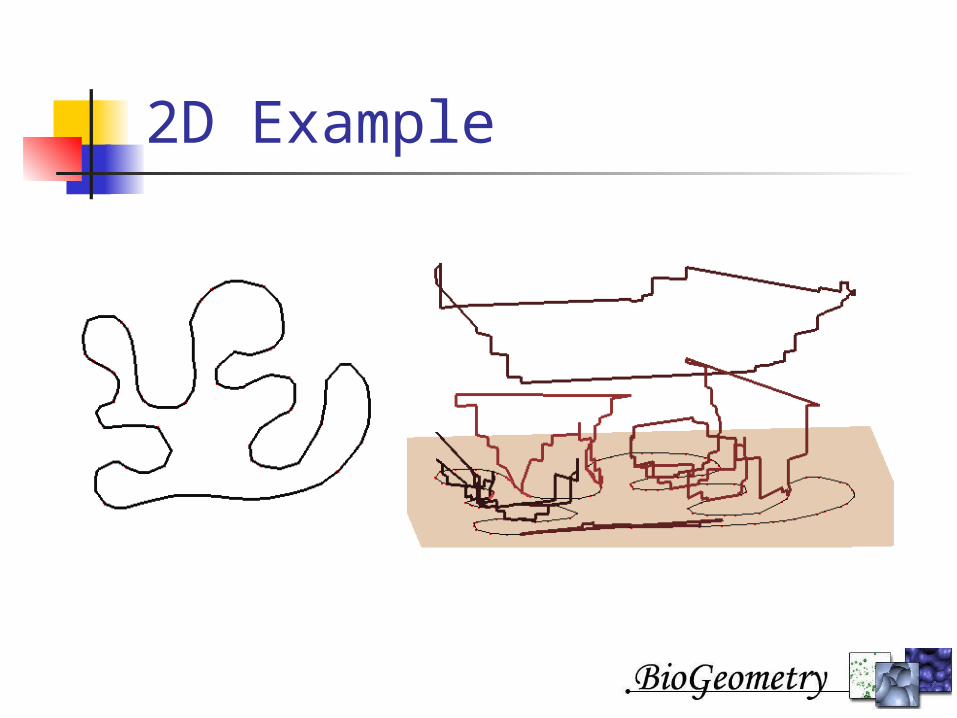
2D Example
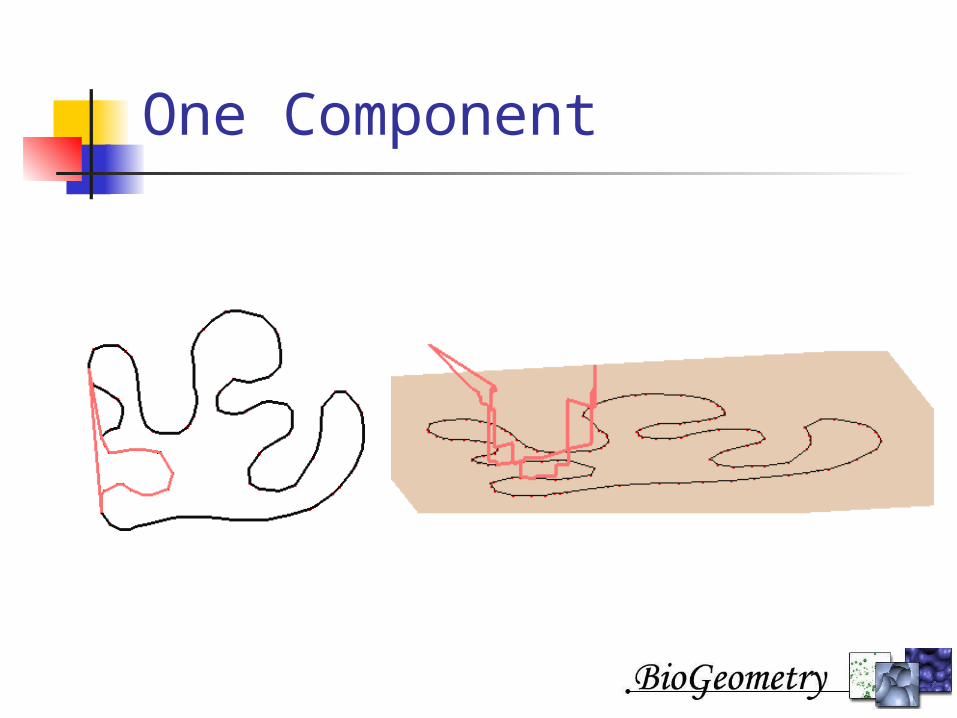
One Component
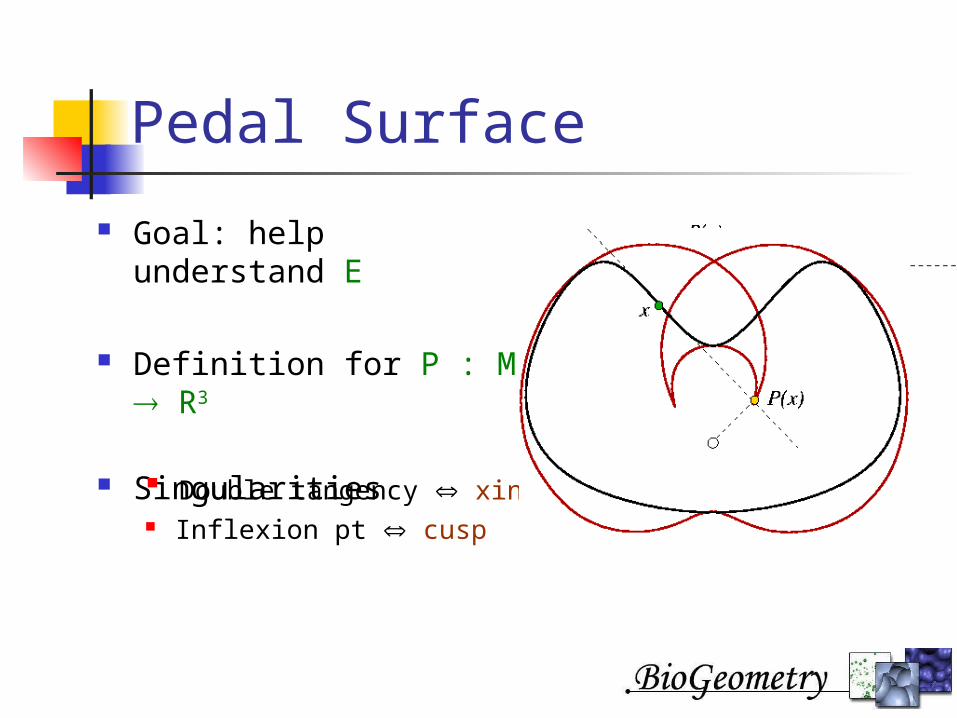
Pedal Surface
Goal: help understand E
Definition for P : M R3
Singularities Inflexion pt cusp Double tangency xing
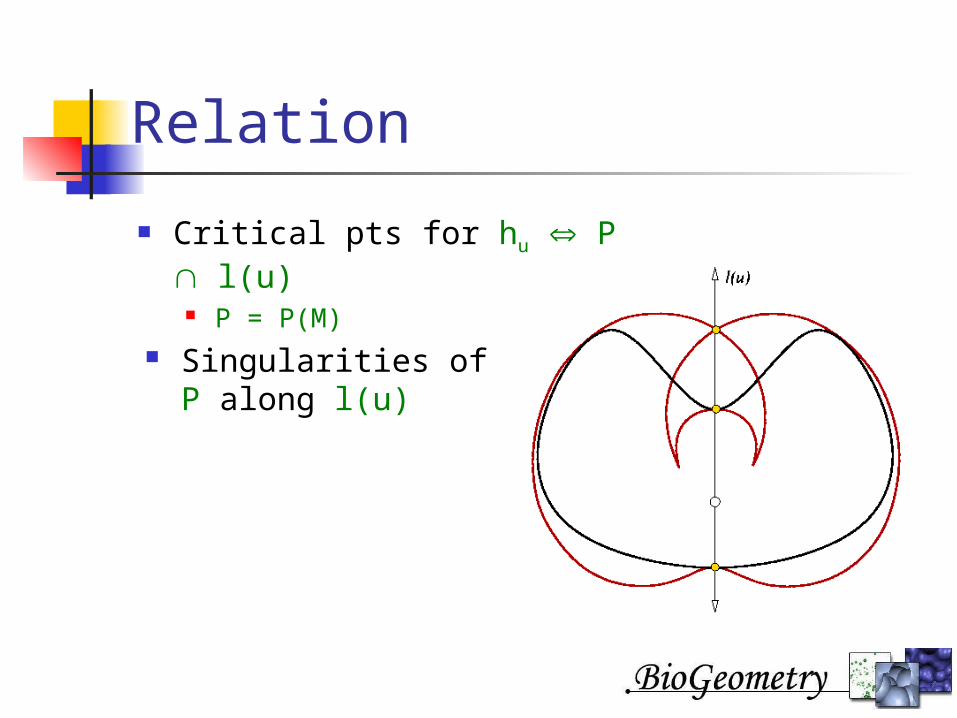
Relation
Critical pts for hu P l(u) P = P(M)
Singularities of P along l(u)
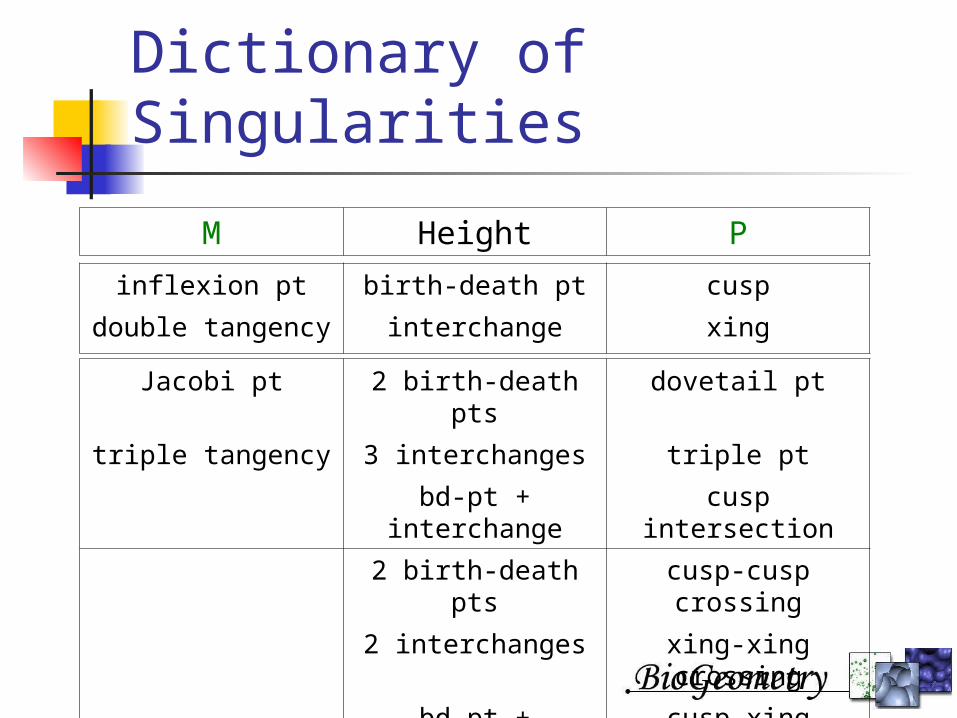
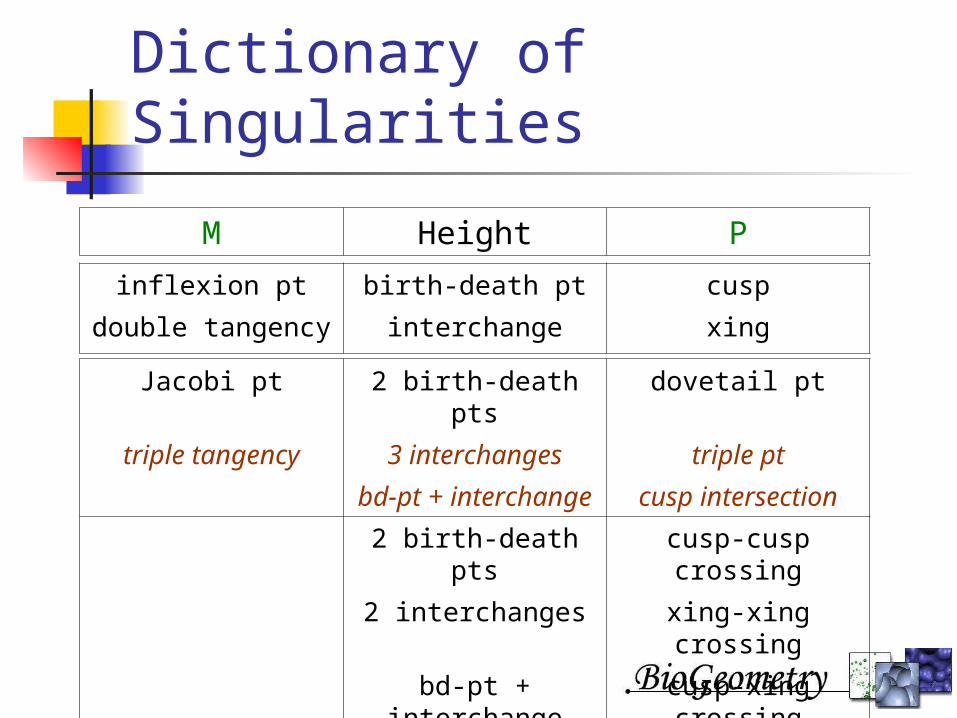
Dictionary of Singularities
M Height P
inflexion pt birth-death pt cusp
double tangency interchange xing
Jacobi pt 2 birth-death pts dovetail pt
triple tangency 3 interchanges triple pt
bd-pt + interchange
cusp intersection
2 birth-death pts cusp-cusp crossing
2 interchanges xing-xing crossing
bd-pt + interchange
cusp-xing crossing
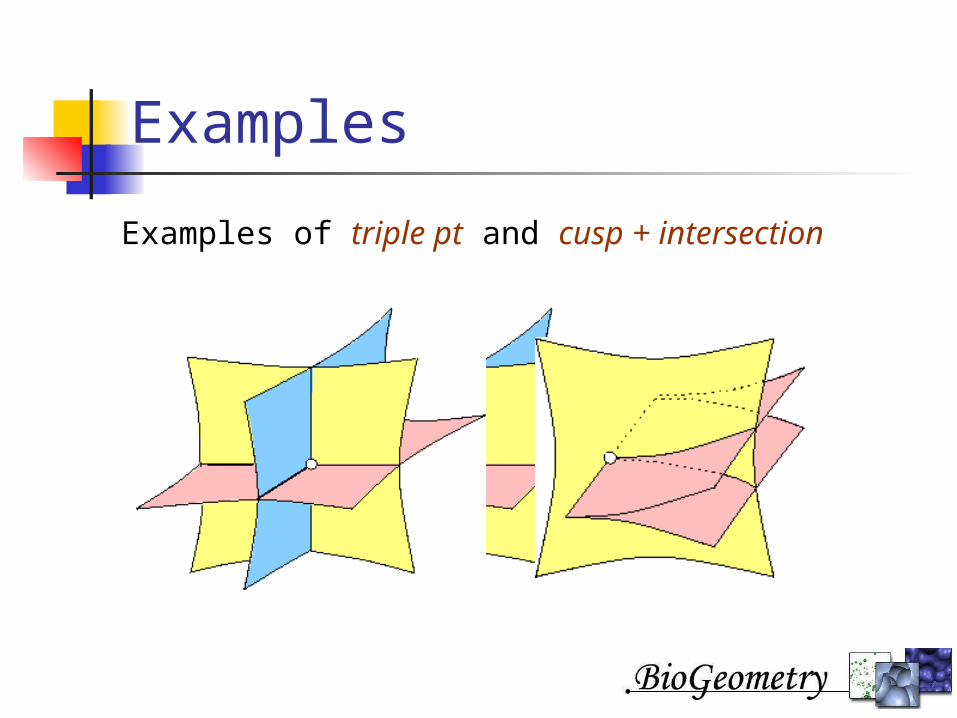
Examples
Examples of triple pt and cusp + intersection
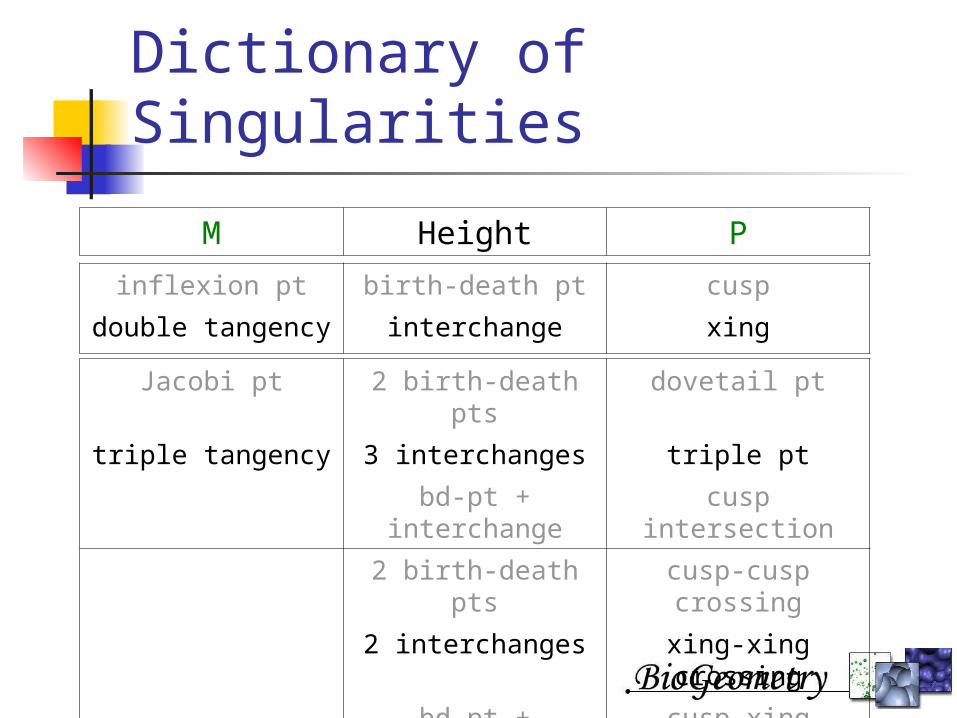
Dictionary of Singularities
M Height P
inflexion pt birth-death pt cusp
double tangency interchange xing
Jacobi pt 2 birth-death pts dovetail pt
triple tangency 3 interchanges triple pt
bd-pt + interchange
cusp intersection
2 birth-death pts cusp-cusp crossing
2 interchanges xing-xing crossing
bd-pt + interchange
cusp-xing crossing
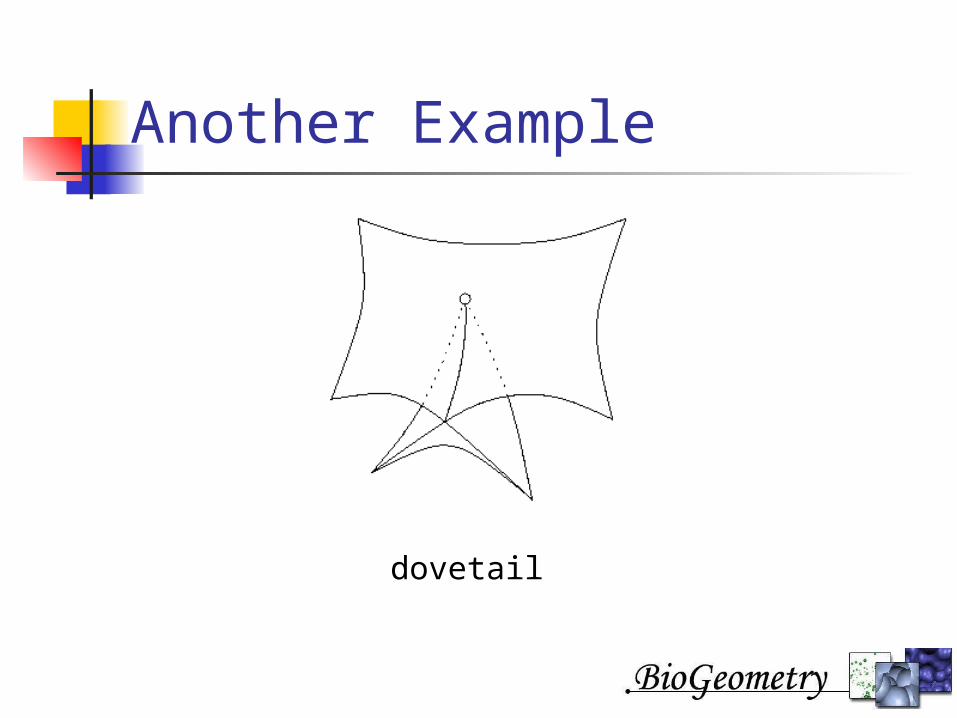
Another Example
dovetail
Max of E
An inflexion pt x cannot be a maximum
Dictionary of Singularities
M Height P
inflexion pt birth-death pt cusp
double tangency interchange xing
Jacobi pt 2 birth-death pts dovetail pt
triple tangency 3 interchanges triple pt
bd-pt + interchange
cusp intersection
2 birth-death pts cusp-cusp crossing
2 interchanges xing-xing crossing
bd-pt + interchange
cusp-xing crossing
Classification of Max for E
Four types of max x No singularity involved:
1-legged : x regular, paired w/ regular pt
Singularity involved: 2-legged : x regular, paired w/ double pt 3-legged : x regular, paired w/ triple pt 4-legged : x double pt, paired w/ double pt
New Manifold M´
Point x M´ May correspond to multiple pts in M, and
vice versa regular pt double pt : double tangency triple pt : triple tangency
A max can be: k-legged, k = 1, 2, 3, or 4.
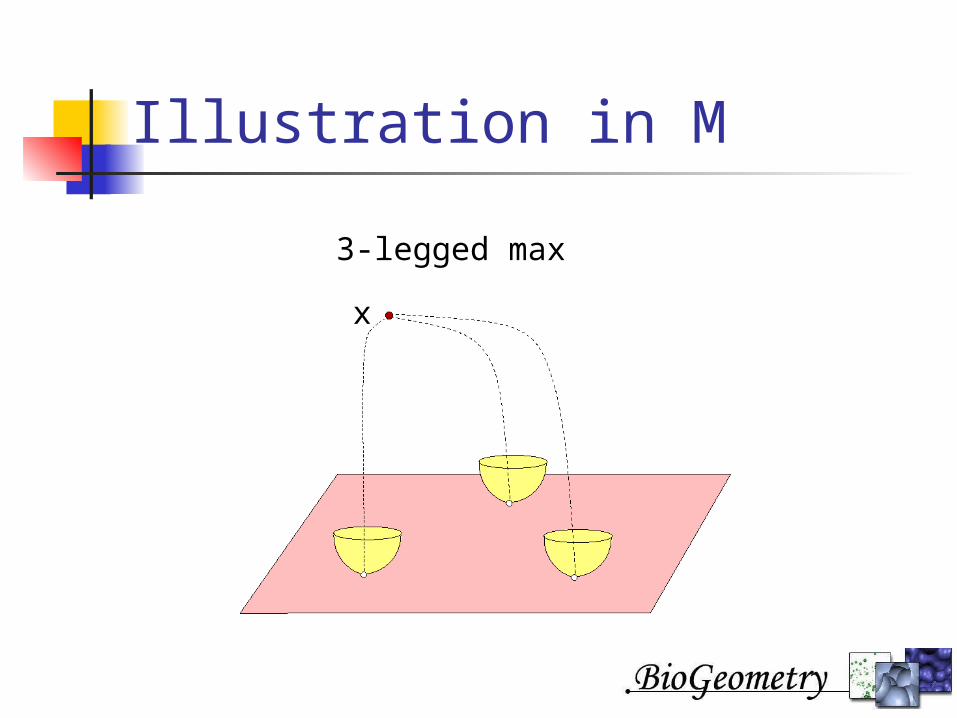
Illustration in M
3-legged max
x
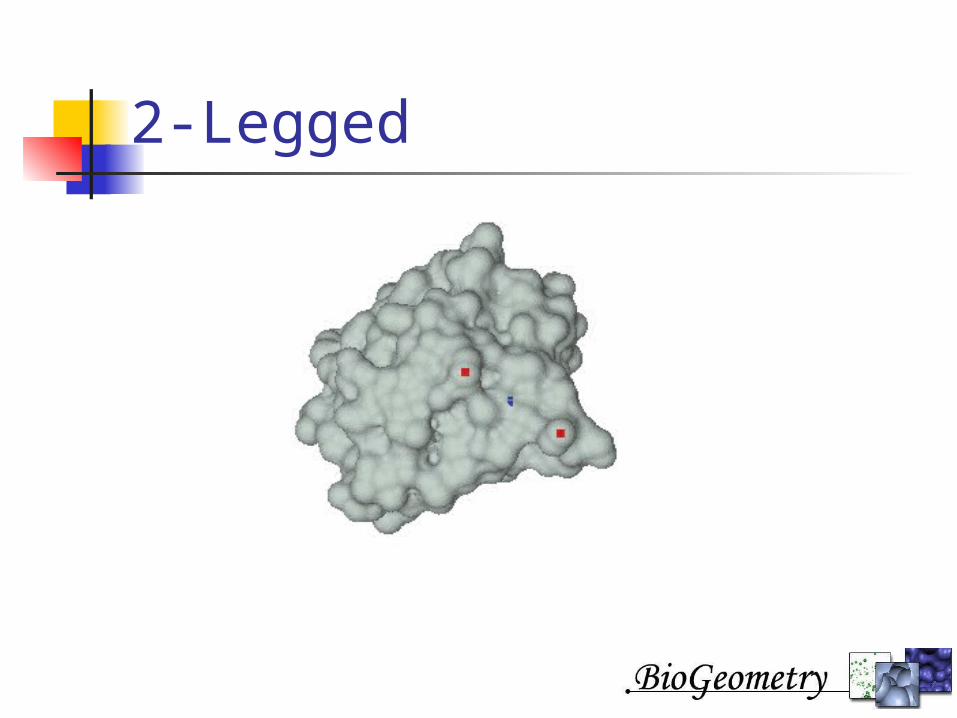
2-Legged
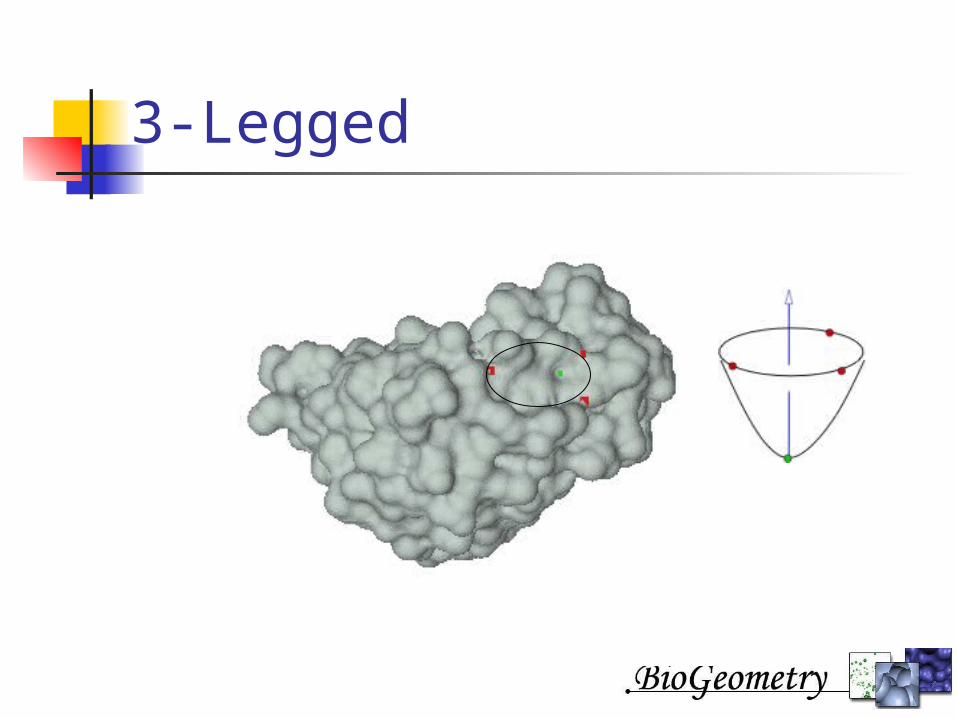
3-Legged
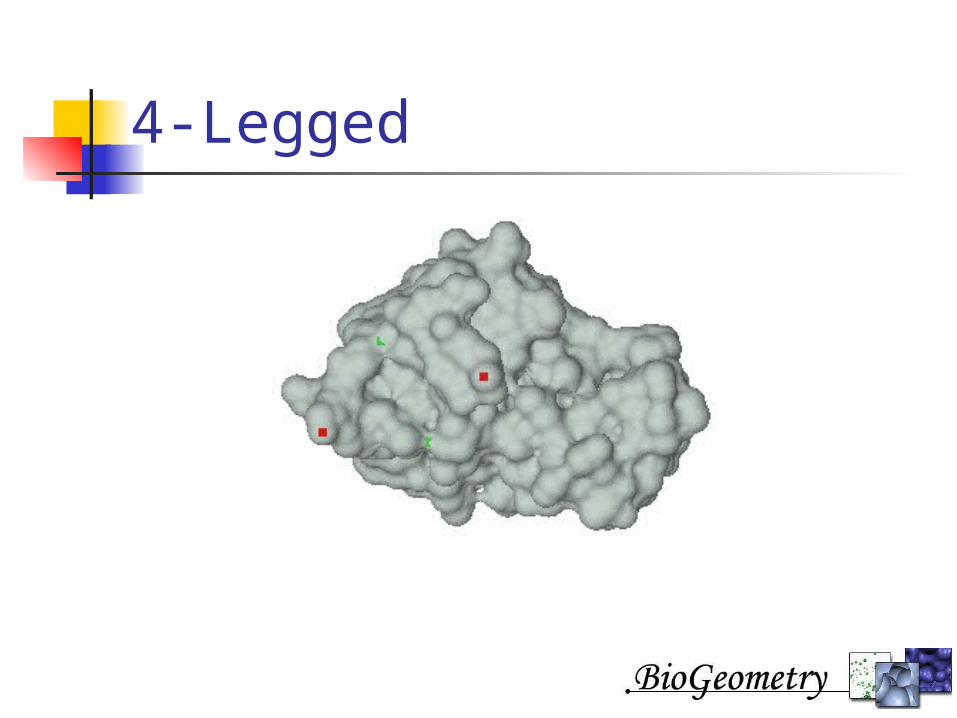
4-Legged
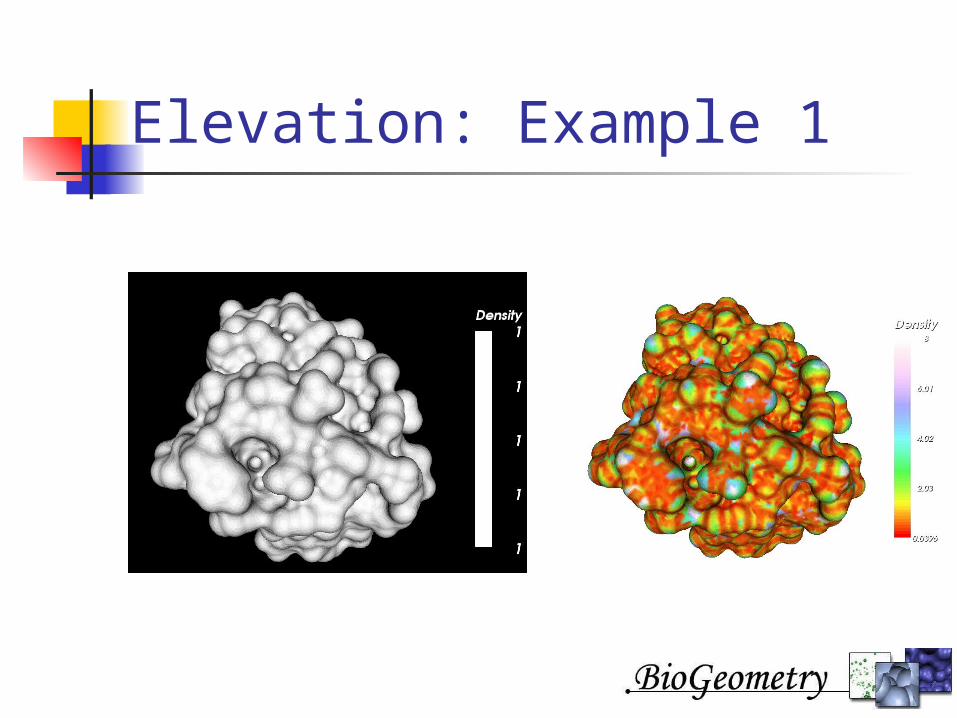
Elevation: Example 1
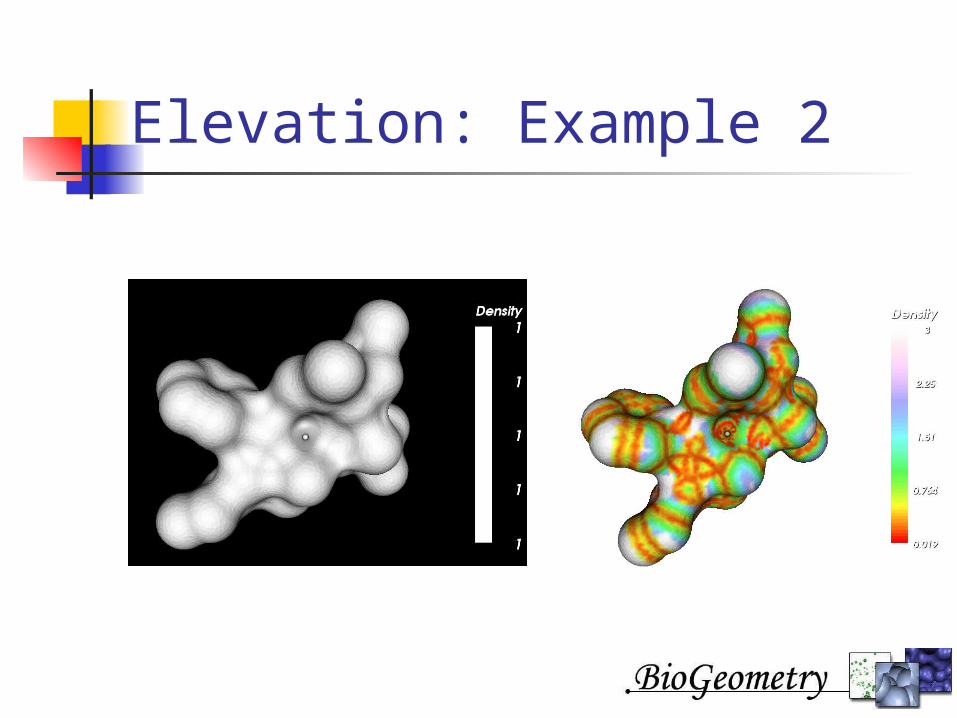
Elevation: Example 2
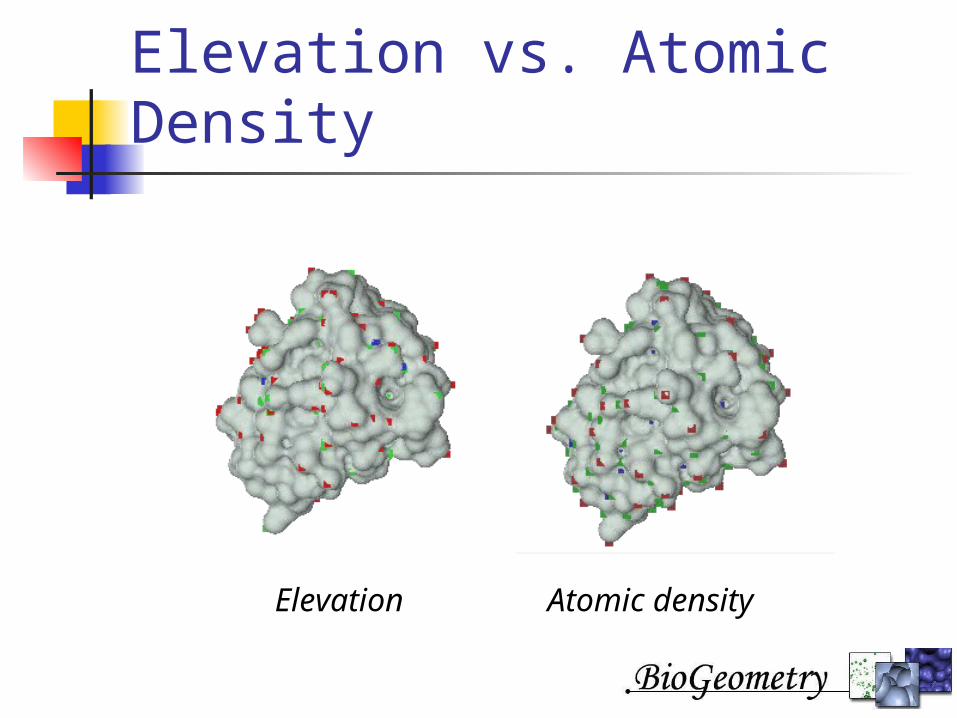
Elevation vs. Atomic Density
Elevation Atomic density
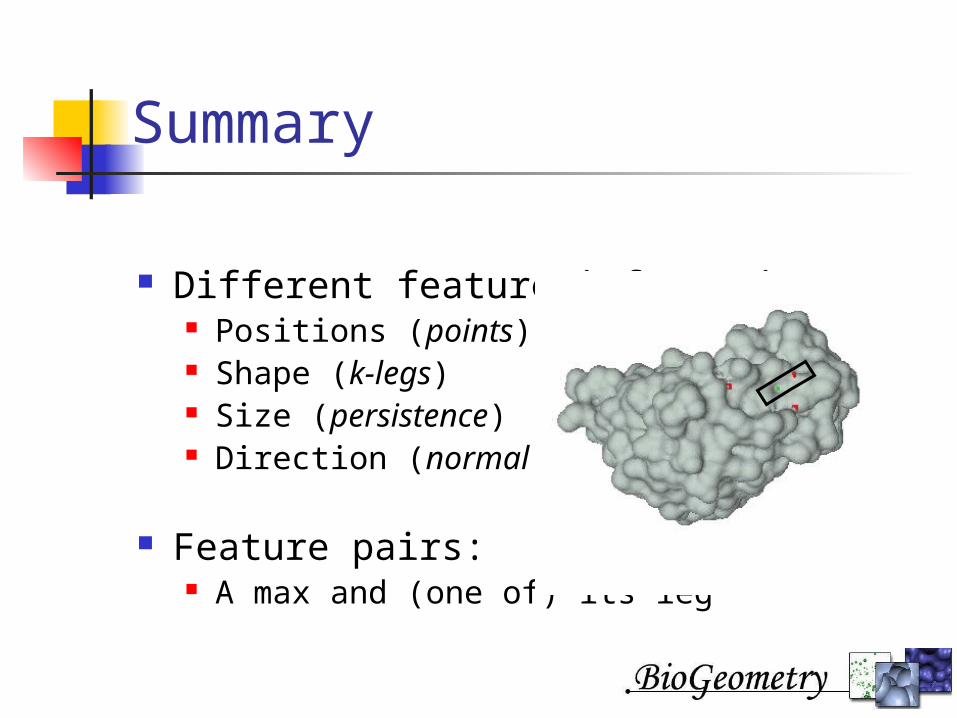
Summary
Different feature information Positions (points) Shape (k-legs) Size (persistence) Direction (normal)
Feature pairs: A max and (one of) its leg
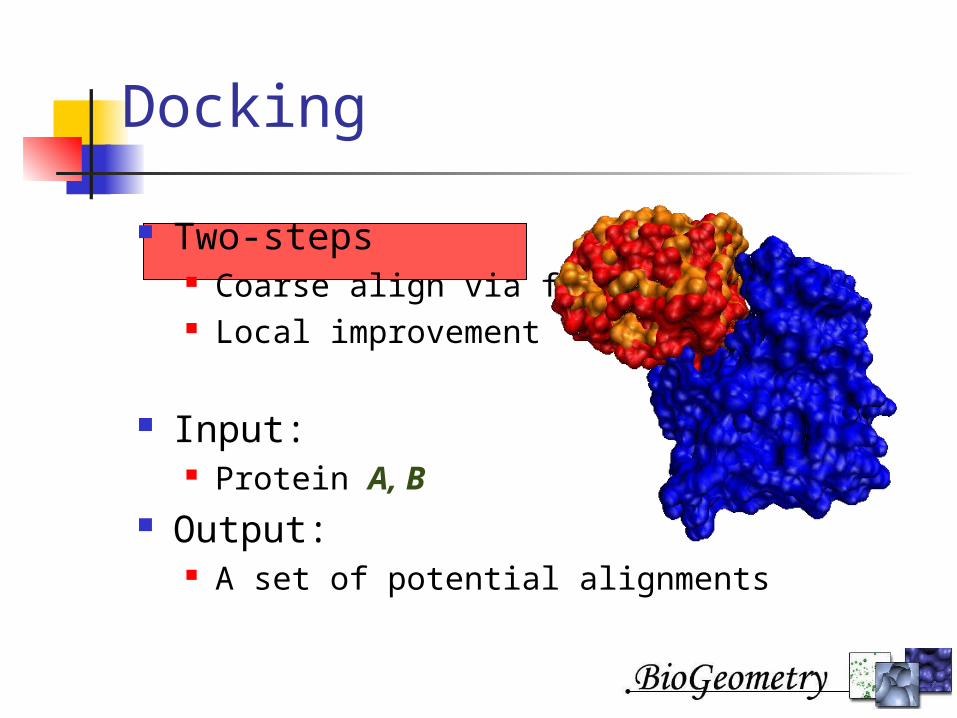
Two-steps Coarse align via features Local improvement
Input: Protein A, B
Output: A set of potential alignments
Docking
Conclusion
Elevation function Relation w/ pedal function Classification of max of Elevation function
Compute max for PL-case
More efficient alg. to compute max Matching (docking)
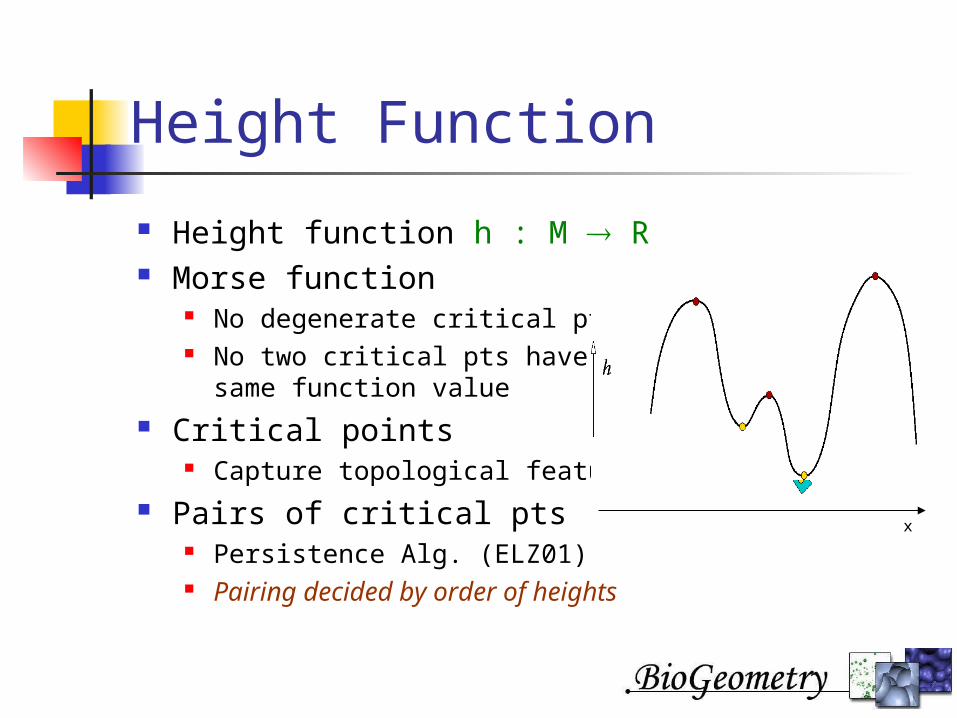
Height Function
Height function h : M R Morse function
No degenerate critical pts No two critical pts have same
function value Critical points
Capture topological features Pairs of critical pts
Persistence Alg. (ELZ01) Pairing decided by order of
heights
x
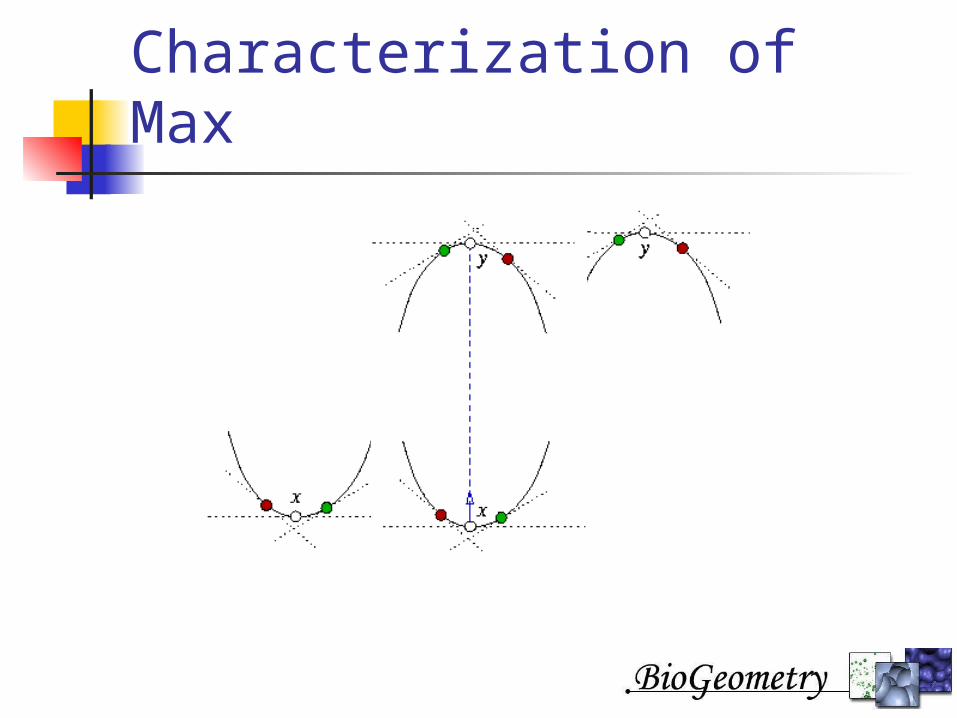
Characterization of Max
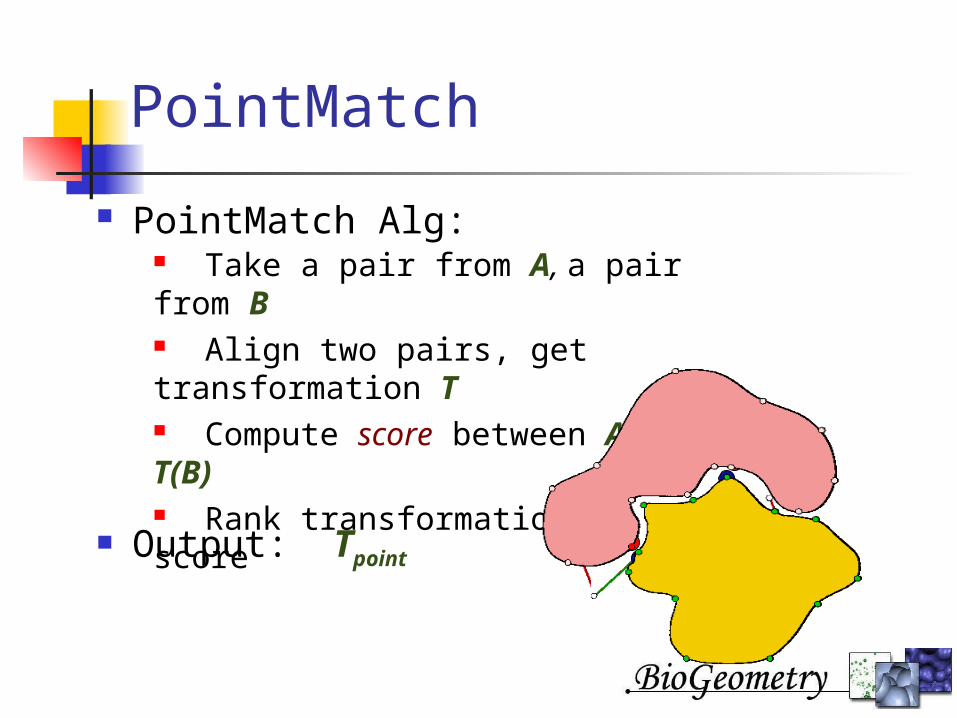
PointMatch
PointMatch Alg:
Output: Tpoint
Take a pair from A, a pair from B Align two pairs, get transformation T Compute score between A and T(B) Rank transformations by score
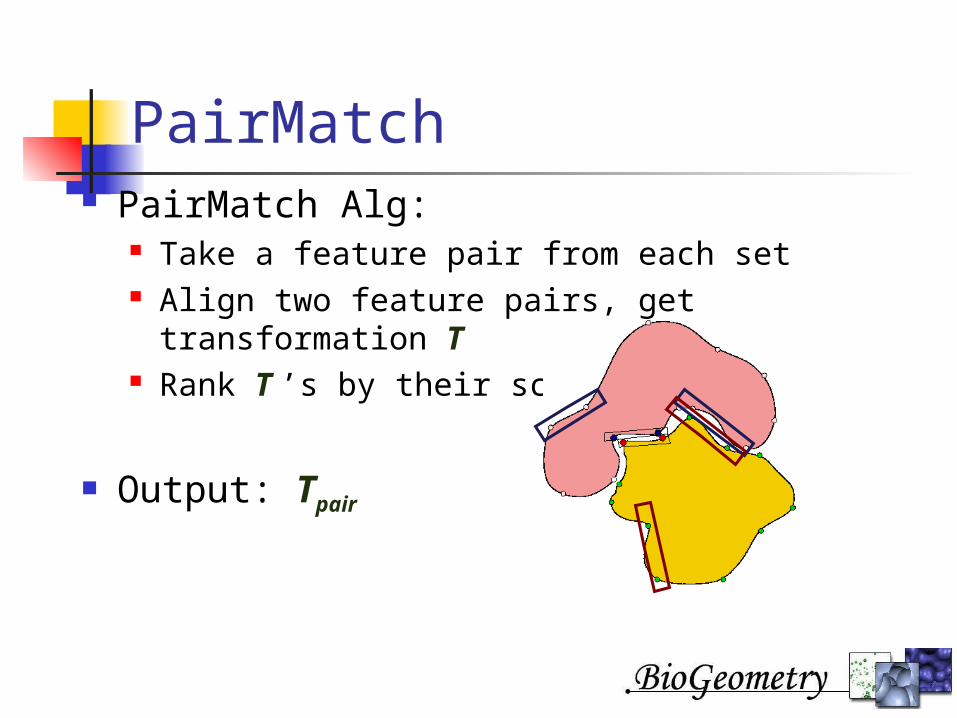
PairMatch PairMatch Alg:
Take a feature pair from each set Align two feature pairs, get transformation T Rank T ’s by their scores
Output: Tpair
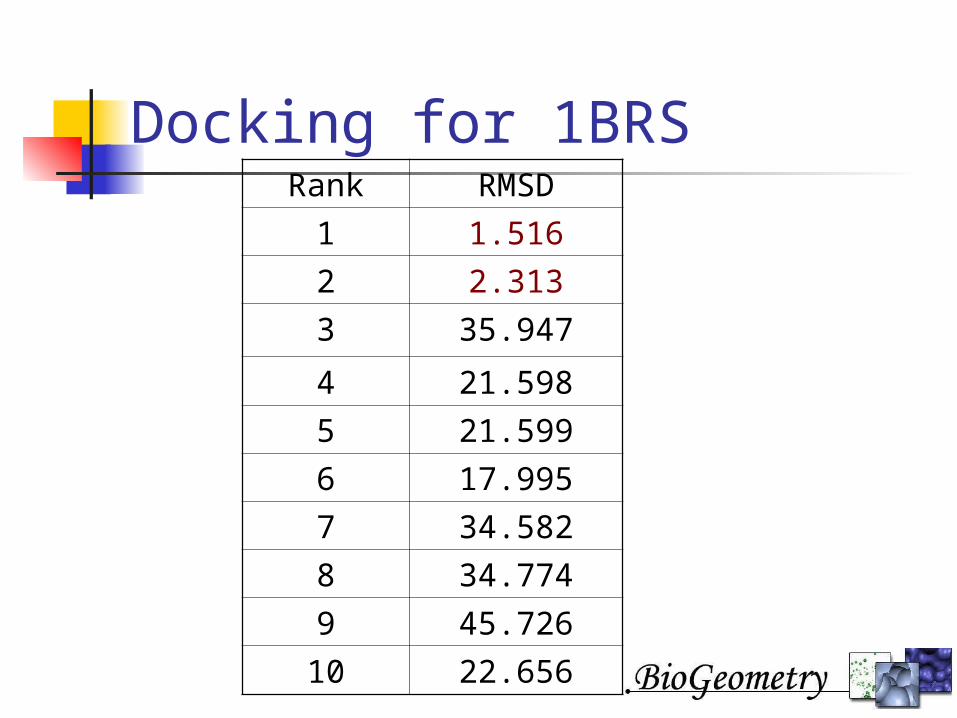
Docking for 1BRSRank RMSD
1 1.516
2 2.313
3 35.947
4 21.598
5 21.599
6 17.995
7 34.582
8 34.774
9 45.726
10 22.656
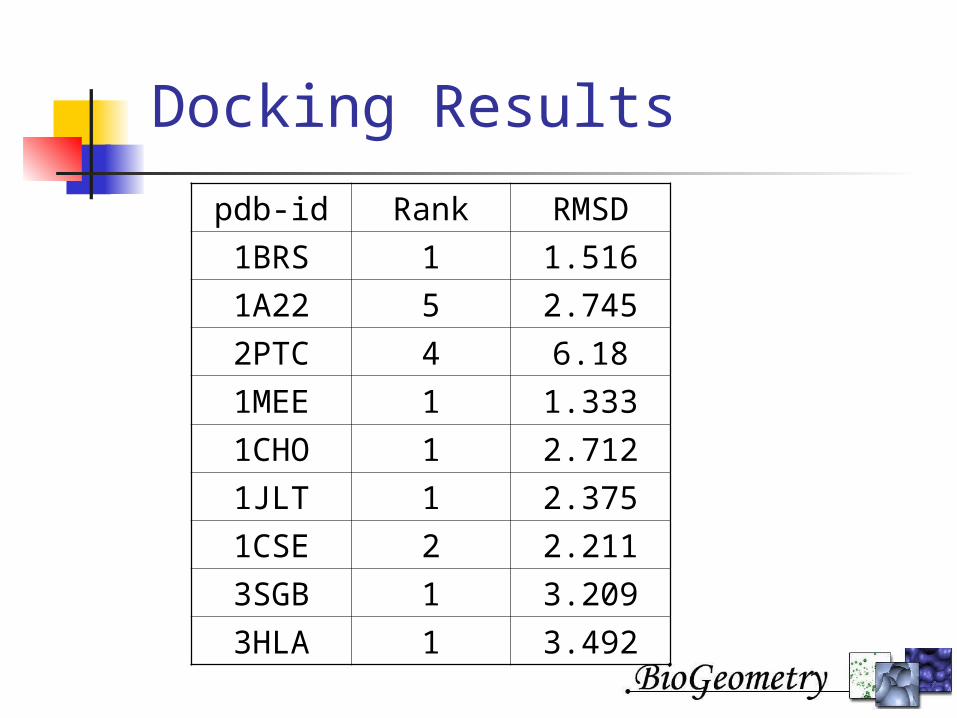
Docking Results
pdb-id Rank RMSD
1BRS 1 1.516
1A22 5 2.745
2PTC 4 6.18
1MEE 1 1.333
1CHO 1 2.712
1JLT 1 2.375
1CSE 2 2.211
3SGB 1 3.209
3HLA 1 3.492