Evolutionary robotics as a tool for studying human sensorimotor dynamics Marieke Rohde Talk:...
42
Evolutionary robotics as a tool for studying human sensorimotor dynamics Marieke Rohde Talk: Multisensory Perception and Action Group Max Planck Institute for Biological Cybernetics, Tübingen, 4.9.2007
-
Upload
beverly-charles -
Category
Documents
-
view
214 -
download
0
Transcript of Evolutionary robotics as a tool for studying human sensorimotor dynamics Marieke Rohde Talk:...

Evolutionary robotics as a tool for studying human sensorimotor
dynamics
Marieke RohdeTalk: Multisensory Perception and
Action Group
Max Planck Institute for Biological
Cybernetics, Tübingen, 4.9.2007

Structure
1. My Background
2. Evolutionary Robotics
3. Perceptual Crossing and Delays
4. Future Research

1.) Background
My ideas on and interests in perception

Personal Background
• Studium Generale, Leibniz Kolleg, Tübingen
• BSc Cognitive Science, Osnabrück
• MSc Evolutionary and Adaptive Systems,
Sussex
• PhD Sussex
Interests:
• What can we know about the world?
(Constructivism)
• Brain/Body/Environment interaction – how
does it link to what we think?

Perception• Dynamical/Embodied turn in Cognitive Science
• Examples from
– Sensory Substitution
– Sensorimotor Adaptation
– Change Blindness
– …
• Sensorimotor constraints can be formalised.
• two “contacts” vs. permanent activity: Perception of an external object.
• Formalisation can be very difficult

2.) Evolutionary Robotics
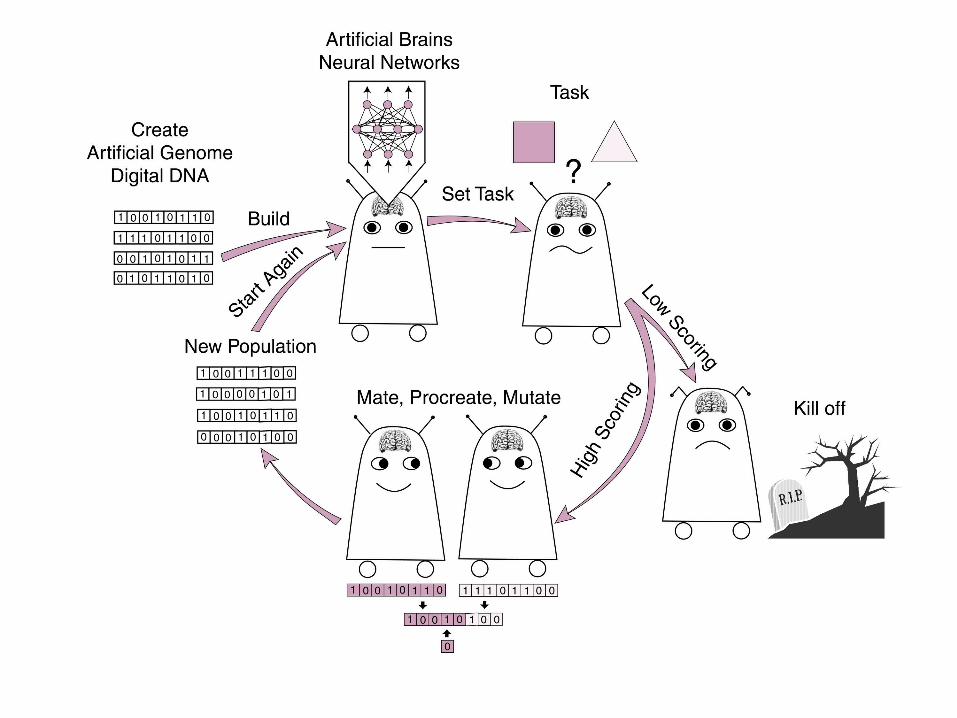

ER
• Closed loop AI modelling
• Underspecify mechanism minimise/control prior assumptions
about behaviour generating mechanism
• Proof of concept, hypothesis generators, beyond cognitive limits,
against intuition
• Dynamical Model of brain, body, world interaction
• „Tool for Thinking“, „Opaque Thought Experiment“, „Intellectual
Warm-Up, mental gymnastics“, „Frictionless Brains“
• GA != model of evolution, CTRNN controller != model of brain

Beer 2003: Categorical Perception
• Circular Agent
• Recurrent Neural Network
Controller
• Move left and right, Distance
sensor array
• Catching Circles, avoiding
Diamonds
• (symmetry)

Beer 2003: Categorical Perception
• Foveate Object
• Scan Left and Right
• Circle: scanning
movements smaller
and smaller
• Diamond: large
avoidance movement

What the agent sees...

Clamp the inputs

„Psychophysics“
• Labeling and
Discrimination
• Discrimination Criteria
(Width!)

„Psychophysics“
• When is the
decision made?

Dynamical Explanations
• Hardcore Mathematics
• Dynamics of agent environment
system

What‘s the point?
• Criticism: No human or animal has ever done that
• Criticism: If at all, modelling limited to
– Insects
– Babys
– Low level behaviour
• Minimal sensorimotor approaches to perception – what if
you use the same simulation for agents and humans?
Di Paolo, Rohde & Iizuka 2007, exchange to GSP

3.) Multisensory Delays

Background
• Cunningham et al. (2001): Adaptation to
visual delays (200ms) in a reactive task.
• Negative aftereffect:
– performance breakdown if delay was
removed
– „The plane seemed to move before the
mouse did – effect appeared to come before
the cause.”
• None of these had been reported before or
after – apart from Libet‘s classical work?

No adaptation in earlier studies
• Smith and Smith 1962,
• Stetson et al. 2006 „it may be that shifts of 100
ms are beyond the hardware limitations of the
calibration mechanisms“
• Cunningham et al.: Time pressure
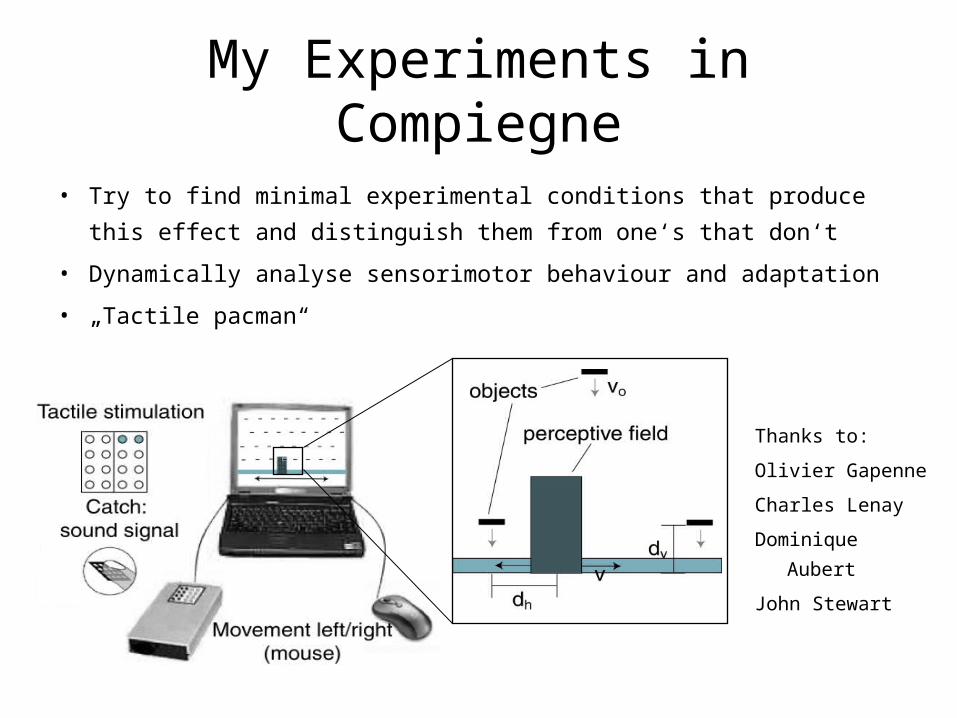
My Experiments in Compiegne
• Try to find minimal experimental conditions that produce this effect
and distinguish them from one‘s that don‘t
• Dynamically analyse sensorimotor behaviour and adaptation
• „Tactile pacman“
Thanks to:
Olivier Gapenne
Charles Lenay
Dominique Aubert
John Stewart

• Some variables more interesting than others
(# of crossings, time to stabilise)
• Some subjects more interesting than others
• Taxonomy based on some measures/visual
appearance of trajectories
How to formalise?
• Velocity, accelaration, crossings, direction,
distance, centering, object velocities, …
• …or any combination of these…
• …in any sub-group of subjects
Results
ER Model
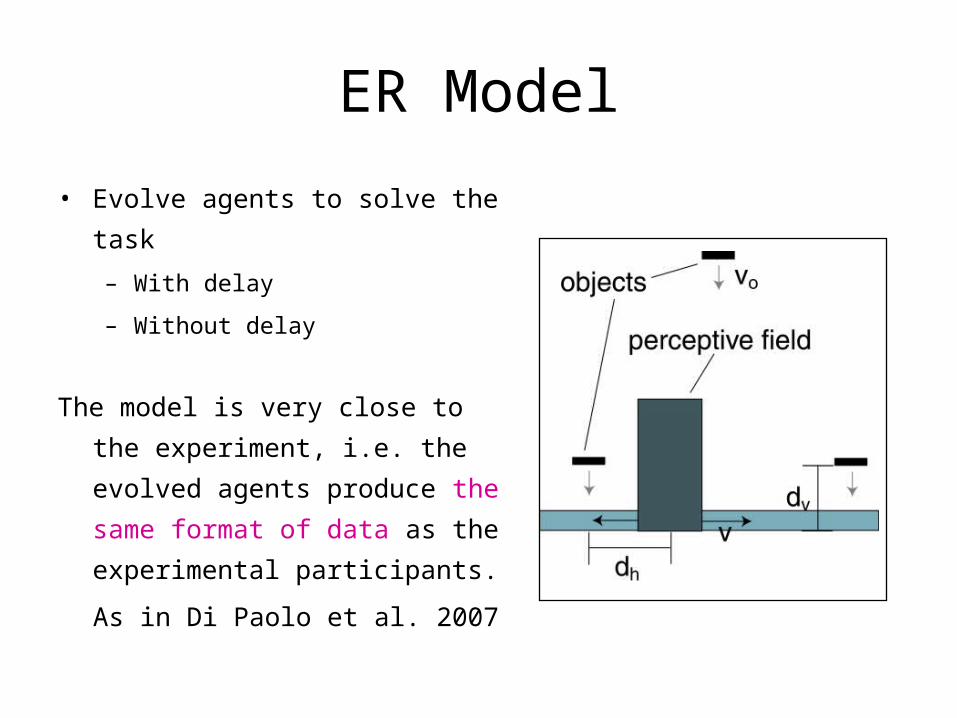
• Evolve agents to solve the task
– With delay
– Without delay
The model is very close to the
experiment, i.e. the evolved
agents produce the same format
of data as the experimental
participants.
As in Di Paolo et al. 2007

Evolution
• Evolvability: Agents were
evolved with delays (DC) and
without delays (NDC)
• Does solving the task with
delays entail solving the task
without delay? This would
mean, negative after effects are
impossible.
• Velocity: Agents evolved without
delays moved on average 78%
faster. (experimental as well, but
not significantly)

Systematic Displacements
• An artifact of the simulation: There are adaptation effects (systematic displacements)
in both cases. However, the fitness function is not exact enough to capture these.
• The same criterion was used in the experiment. Maybe there was a negative
aftereffect, but it had not been registered?
• Test hypothesis in experimental data: displacements from different distributions?
• Introduce delay: p = 0.0125 [-0.6318 -0.0785],
• Remove delay: p = 0.0205 [0.0486 0.5658]
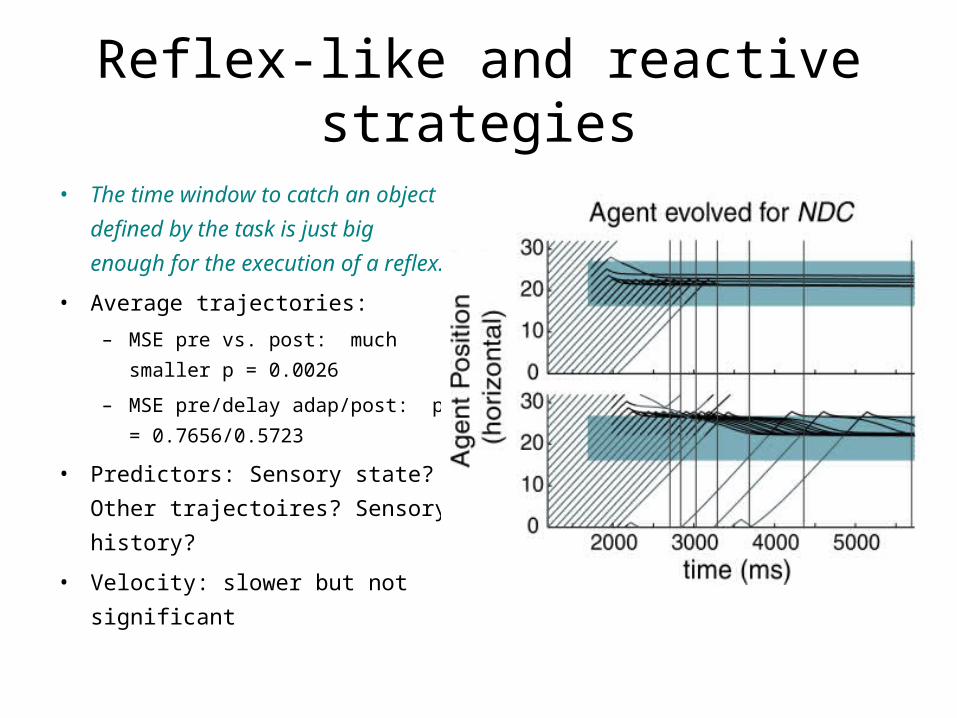
Reflex-like and reactive strategies
• The time window to catch an
object defined by the task is just
big enough for the execution of a
reflex.
• Average trajectories:
– MSE pre vs. post: much smaller
p = 0.0026
– MSE pre/delay adap/post: p =
0.7656/0.5723
• Predictors: Sensory state? Other
trajectoires? Sensory history?
• Velocity: slower but not significant

Conclusions
• Model before doing the experiment (trial and error is easier in simulation)
• Simplification: no history, no sound signals, object velocity....
• Find adaptation effects: systematic displacements, MSE from average
trajectories
• Distinction:
– reflex-like: Displacement
– Reactive: Increase in inertia
– Anticipatory: Delay
• Measures: other trajectories, momentary sensory state vs. time series, ...
4. Future Research

Replication and extension
• Cunningham et al.
2001
• Pros: feasible, simple,
strong
• Cons: vision, not fully
controlled
• Test time pressure:
vs. slower

Modality dependence
• Are adaptation effects linked to
particular/ established
sensorimotor couplings?
• Pros:
– No vision
– Conceptually strong
• Cons:
– Did not work too well in the past

Stimulus Ambiguity and Simultaneity Perception
• „Temporal Necker Cube“
• Delay vs. Inertia
• Delay vs. Displacement
• Delay vs. No delay
• Pros:
– Powerful testbed. Experience without introspection.
• Cons:
– Speculative, open ended, complicated.

Other free floating ideas
• Variable delays
– in my control, outside my control
– Variation of delay necessary for task
• @ WP2 (equilibrium):
– Redundant signals: which one will supersede?
...and evolutionary robotics?
... Will help with the „how“
– What is the relation between sensation, motion and
behaviour to start with?
– How does it change?
– Under which circumstances?
– Which strategy is prone to which change?
– Which strategy produces which systematic error?
– What are the dynamical subtleties?
Any questions?

References• Auvray, M., Lenay, C., & Stewart, J. (2006). The attribution of intentionality in a simulated
environment: the case of minimalist devices. In Tenth Meeting of the Association for the Scientific Study of Consciousnes, Oxford, UK, 23-26 June, 2006.
• Bach-y-Rita, P., M. E. Tyler, and K. A Kaczmarek: Seeing With the Brain. Int. J. Human-Computer Interaction 15(2) 2003. 285-295.
• Beer, R.D. (2003). The dynamics of active categorical perception in an evolved model agent (with commentary and response). Adaptive Behavior 11(4):209-243.
• Cunningham, D.W., A. Chatziastros, M. von der Heyde and H.H. Bülthoff: Driving in the future: Temporal visuomotor adaptation and generalization. Journal of Vision 1(2), 88-98 (2001)
• Cunningham, D.W., Billock, V.A. and Tsou, B.H.: Sensorimotor adaptation to violations of temporal contiguity. Psychological Science 12(6), 532-535 (2001)
• Di Paolo, E. A., Adaptive Systems lecture presentations, University of Sussex (UK), Spring Term 2006.
• Harvey, I., Di Paolo, E., Wood, R., Quinn, M. and Tuci, E. A. (2005). Evolutionary Robotics: A new scientific tool for studying cognition. Artificial Life, 11(1-2):79-98.
• Helbing et al. Nature, 388, pp 45 – 50, (1997). • Lenay C. (2003) Ignorance et suppléance : la question de l'espace, HDR 2002, Université de
Technologie de Compiègne• Smith K.U. and W. M. Smith: Perception and motion: an analysis of space-structured behavior.
Philadelphia, Saunders, 1962.• Stetson, C, X. Cui, P. R. Montague and D. M. Eagleman: Illusory temporal reversal of action and
effect reveals neural conflict response. Submitted to Neuron.
Appendix: Perceptual Crossing
c.f. Di Paolo et al. 2007

Perceptual Crossing (Auvray, Lenay and Stewart 2006)
• Two subjects move on a tape and have to indicate who is the other
by mouseclick
• Fixed object and shadow (identical motion) as „lures“
• 70% correct responses
• Stimulation-response ratio for shadow and other subject identical.
• Distinction emerges from the mutual search for each other.
Evolutionary Robotics Simulation
• Qualitatively similar results
• Confirmation of their conclusion:
– The distinction arises from the global dynamics of interaction
– No individual discriminatory capacity

Evolutionary Robotics Simulation
• Why does it take so long to evolve
avoidance of the static object?
• Looking back at data:
– 33% stimulation from static object
– 15% stimulation from shadow
• An evolutionary robotics model
predicts human behaviour:
Integrated sensory stimulation is a
good predictor for when subjects
click!

Extended Model (Hiro Iizuka)
• Question: Are these findings just
an artefact of the experimental
design?
• Interact with a recording, not with
a shadow
• Perceptual strategy:
– Induce breakdown to “test” the
interaction partner
– No individual recognition capacity
or ‘model of the other’
– just exploit noise/subtle timing
differences + interaction dynamics
Take home message
• If you take into consideration the interaction level and its dynamics
– Supposedly hard tasks become become simple (Is this another
intentional entity or just a mobile stimulus?)
– Supposedly simple tasks become difficult (Is this a static object?)
• For any particular social behaviour, probably, both interactional and
individual factors play a role
• Need for a methodology that accounts for both
• Simulation models to generate hypotheses and proof concepts

Reciprocally Causal Processes
Model by Helbing et al. Nature, 388, pp 45 – 50, (1997).
Many times, when you have complex, durable processes with circular or
reciprocal causality, you will observe the formation of some spontaneous
invariant organisation.

Reciprocally Causal Processes
• Sensorimotor coordination Can be
viewed as a process of reciprocal
causation (Between global and local
dynamics) – blind person with a cane.
• Fluid behaviour becomes less and less
conscious as it starts to rely on
coherences of sensorimotor
coordination.
• Surprise originates only when
sensorimotor coordination breaks
down. (Obstacles, perturbations,
distortions, etc.)
• Perceptual invariants:
– Size
– Shape
– Space
– Colour
– Simultaneity
– …