Evolutionary Dynamics in Time-Varying Environments in the...
42
Evolutionary Dynamics in Time-Varying Environments in the Quasispecies Model Thesis submitted in partial fulfillment of the requirement for the degree of master of science in the Faculty of Natural Sciences Submitted by: Pavel Gorodetsky Advisors: Prof. Yishay Manassen and Dr. Emmanuel Tannenbaum Department of Physics Faculty of Natural Sciences Ben-Gurion University of the Negev February 2008
Transcript of Evolutionary Dynamics in Time-Varying Environments in the...

Evolutionary Dynamics in Time-Varying Environments in the Quasispecies Model
Thesis submitted in partial fulfillment of the requirement for the degree of master of science in the Faculty of Natural Sciences
Submitted by: Pavel Gorodetsky
Advisors: Prof. Yishay Manassen and Dr. Emmanuel Tannenbaum
Department of Physics
Faculty of Natural Sciences
Ben-Gurion University of the Negev
February 2008

: החיבור נושא
“Evolutionary Dynamics in Time-Varying Environment in the Quasispecies Model”
" הטבע " למדעי בפקולטה מגיסטר תואר קבלת לשם חיבור
גורודצקי: פבל מאת
' : מנסן ישי פרופ ראשון המנחה שם
' : טננבאום עמנואל דר שני מנחה שם
לפיזיקה המחלקה
הטבע למדעי הפקולטה
בנגב גוריון בן אוניברסיטת
________________ : _________________________ : תאריך המחבר חתימת
________________ : _____________________ : תאריך ראשון המנחה חתימת
________________ : _______________________ : תאריך שני המנחה חתימת
_______________ : " מחלקתית ועדה ר יו : ________________חתימת תאריך

Copyright (c) Pavel Gorodetsky. Permission is granted to copy, distribute and/or
modify this document under the terms of the GNU Free Documentation License,
Version 1.2 or any later version published by the Free Software Foundation; no
Invariant Sections, no Front-Cover Texts, and no Back-Cover Texts. A copy of the
license is included in the section entitled GNU Free Documentation License”.
3

Abstract
During the course of evolution, living organisms have developed several
mechanisms to maintain the integrity of their genomes. These mechanisms
can both repair errors that arise from the error-prone replication of DNA (mu-
tations), as well as damage to DNA due to external factors, such as radiation.
Several examples of such mechanism are lesion repair, mismatch repair and
the SOS response. These mechanisms act at the organismal level, that is, they
are activated inside an individual within the population. Sexual reproduction
may also be considered as a means of maintaining the integrity of the genome
at the population level, as sexual reproduction involves interaction between
individuals.
In this thesis, we study two mechanisms and their effect on the adapt-
ability of populations in dynamic environments: (1) The MisMatch Repair
mechanism (MMR), which lowers the effective mutation rate during replica-
tion; (2) Sexual reproduction, which may purge deleterious mutations in static
environments or speed up adaptation in dynamic environments.
The first part of the thesis models the MMR mechanism. We were able
to derive an analytically solvable model in a point-mutation limit, which cor-
rectly predicts the fraction of viable mutators in a population as a function of
mutation rate, efficiency of the repair mechanism, and the properties of the
dynamical fitness landscape.
In the second part, we model the asexual and sexual reproduction pathways
in S. cerevisiae (Baker’s yeast). We were able to show that sexual replication
can both purge deleterious mutations in a static environment, as well as lead
to faster adaptation in a dynamic environment. This implies that sex can
serve a dual role, which is in sharp contrast to previous theories.
The main part of the work on MMR is contained in:
P. Gorodetsky and E. Tannenbaum, “The Effect of Mutators on Adaptability
in Time-Varying Fitness Landscapes”, Phys. Rev. E 77, 042901 (2008)
4

Contents
1 Introduction 7
2 Background 9
2.1 Biological Background . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.1.1 MisMatch Repair . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.1.2 Asexual and sexual pathways in Saccharomyces cerevisiae . . 13
2.2 The Molecular Quasispecies . . . . . . . . . . . . . . . . . . . . . . . 14
2.2.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.2.2 The quasispecies equations . . . . . . . . . . . . . . . . . . . . 14
2.2.3 Solutions of the rate equations . . . . . . . . . . . . . . . . . . 17
2.2.4 Single fitness-peak landscape . . . . . . . . . . . . . . . . . . . 18
3 MMR (MisMatch Repair) Mechanism 21
4 Maintenance of Sexual Reproduction 23
4.1 Description of the model . . . . . . . . . . . . . . . . . . . . . . . . . 23
4.2 Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
5 Discussion 35
5

List of Figures
1 DNA double helix molecule . . . . . . . . . . . . . . . . . . . . . . . 10
2 Asexual pathway in yeast . . . . . . . . . . . . . . . . . . . . . . . . . 14
3 Sexual pathway in yeast . . . . . . . . . . . . . . . . . . . . . . . . . 15
4 Comparison of different methods of solving the quasispecies equations 20
5 The replication scheme of a haploid cell . . . . . . . . . . . . . . . . . 22
6 Illustration of a dynamic fitness landscape . . . . . . . . . . . . . . . 23
7 Adaptation of the asexual population on a dynamic landscape . . . . 30
8 Adaptation of the sexual population on a dynamic landscape . . . . . 32
9 Adaptability regions for asexual and sexual populations . . . . . . . . 33
10 Comparison of the evolutionary dynamics of the asexual and sexual
populations on the dynamic fitness landscape . . . . . . . . . . . . . 34
6

1 Introduction
All properties of a given organism are determined by the genetic information that
it carries in its genes. This information is transferred from one generation to the
next through the process of replication. Since genome size may differ from 580 kilo
base-pairs in Mycoplasma genitalium (human parasite) to 3.2×106 kilo base-pairs in
humans, the replication mechanism must be extremely accurate in order to maintain
the integrity of the genetic information, as mutations, that is errors that occur during
replication, may degrade the viability of an organism. Several mechanisms that
increase the fidelity of replication, and reduce the number of deleterious mutations
in populations, were developed during the course of evolution.
The MisMatch Repair (MMR) mechanism is of particular interest to evolutionary
biologists, since it is believed that non-functional MMR strains, known as mutators,
play an important role in the emergence of antibiotic drug resistance, and also act as
gateway cells for the emergence of cancer [1]. Due to the importance of mutators,
they have been the subject of theoretical and experimental work [1, 2, 3, 4, 5, 6,
7, 8]. The theoretical work has concentrated on modeling the effect of mutators on
adaptation to new environments, whereas the effect of mutators in time-dependent
environments was studied numerically.
The evolution and maintenance of sexual reproduction as the preferred, and in
some cases only, mode of reproduction in complex organisms is one of the central
questions of evolutionary biology. Numerous studies have been conducted on the
subject of sexual reproduction, some of which have argued that sex is advantageous
because it helps to remove deleterious mutations [9, 10, 11, 12, 13, 14, 15], and
some of which have argued that sex allows for faster adaptation in dynamic envi-
ronments [16, 17, 18, 19]. These two classes of theories have often been presented
as opposing explanations for the existence of sex. Here, we develop mathemati-
cal models based on the asexual and sexual replication pathways of Saccharomyces
cerevisiae, or Baker’s yeast [20, 21, 22, 23], in order to test the plausibility of both
hypotheses for the existence of sex for the case of unicellular organisms. We find, in
7

contrast to previous explanations for the existence of sex, that sex can serve a dual
role: That is, sex may both act as a mechanism for purging deleterious mutations
in a static environment, as well as allow a population to adapt more quickly in a
time-varying environment.
Our study had two aims:
1. To study the effect of mutators on adaptability in dynamic environments.
In particular, we were interested in deriving an analytically solvable model
that predicts the fraction of viable mutators as a function of various system
parameters. This model is an extension of previous analytical work done on
adaptation to a new, but static, environment [4, 6], or on adaptation to an
environment that fluctuates between two states [8].
2. To derive an analytical model of sexual and asexual reproduction pathways
in Saccharomyces cerevisiae (Baker’s yeast) in a dynamic environment, that
shows that sex may have a dual role in evolution: Namely, to both purge
deleterious mutations from the population, and decrease adaptation times in
dynamic environments. This is in sharp contrast to the well-known theories
regarding maintenance of sexual reproduction.
This thesis is organized as follows: The following section (Section 2) gives the
theoretical background for our work. We start with an overview of the biological
phenomena we would like to model: The MisMatch Repair mechanism and sexual
reproduction. We go on to describe the mathematical foundations of quasispecies
theory, the framework which we used in our models.
In section 3, we develop the model of the Mismatch Repair mechanism in E.coli
in a dynamic environment. We begin with the description of the model and its
parameters. We then proceed to solve the model and present the results.
In section 4, we extend the static model of sexual and asexual reproduction
pathways in Saccharomyces cerevisiae [24], to the dynamic case. We begin with the
description of the model and its parameters. We then proceed to solve the model
and present the results.
8

We conclude our work in section 5, where we discuss the concequences of our
results, the limitations of our models and suggest directions for future research.
2 Background
2.1 Biological Background
All living organisms carry genetic information in the form of genes, which in turn are
built from DNA (Deoxyribo-Nucleic Acid) molecules. DNA is a polymer composed
of repeating subunits called nucleotides. In living organisms, the DNA molecule
usually consists of two complementary strands. A nucleotide has both a part of
the backbone of the DNA molecule and a base through which it interacts with the
other strand in the helix. The hydrogen bonds between the bases are responsible
for stabilizing the double helix structure of the molecule. There are four bases from
which the DNA molecule is built: Adenine (A), Cytosine (C), Guanine (G) and
Thymine (T). There are only two possible types of bonds between the bases: A-T
and C-G. This is known as complementary base pairing. As a result, each strand of
the double helix molecule carries the same genetic information. This is extremely
important in the replication process, where the double helix structure is broken and
each strand of the parent molecule serves as a template for the daughter molecules.
A genetic sequence of a specific individual is called the genome and the set of all
possible genetic sequences of a given population is called the sequence space. The
size of the sequence space is determined by the length of the genome: If the length
of the genome is L, and if each base is chosen out of alphabet of size S (S = 4 in
all known lifeforms), the size of the sequence space is given by SL. Genome size
may differ from 580 kilo base pairs in Mycoplasma genitalium (human parasite) to
3.2× 106 kilo base pairs in humans [25].
All properties of a living organism are just an expression of the genetic infor-
mation its DNA carries. This information is transferred from one generation to
another through the replication process. Errors in the replication process are called
9

Figure 1: The structure of a fragment of a DNA double helix molecule.
mutations and, if mutations occur, the properties of the offspring may differ from
the properties of the parent. A mutation is said to be neutral if it has no effect on
the fitness of the organism, deleterious if it decreases the fitness, lethal if it causes
death, and beneficial if it increases the fitness. Most of mutations are neutral and
beneficial mutations are relatively rare.
In order to maintain the integrity of the genome throughout the course of evo-
lution, organisms have developed various genetic damage repair mechanisms. Our
work deals with two of these mechanism: (1) MisMatch Repair - Post-replication
process, which searches and corrects errors in the daughter DNA strand; (2) Sex-
ual Reproduction - By the means of sexual recombination deleterious mutations are
removed from population.
2.1.1 MisMatch Repair
In wild-type (mutation-free) cells, mutations occur at a frequency of 1 error per
109 − 1010 base-pairs per cell division [26]. Mis-incorporation of the nucleotides
during DNA synthesis yields mismatches (non-complementary base-pairs) within the
DNA helix. In case they are not corrected, these mismatches are fixed as mutations
in subsequent rounds of DNA replication.
The nature of DNA polymerase (an enzyme that, during the replication process,
“reads” an intact DNA strand as a template and uses it to synthesize the new
10

strand) and base pair geometry induce an error rate of 10−4−10−5 at the nucleotide
insertion stage of the DNA synthesis. If an error occurs during this stage, then
a proofreading mechanism edits the mistake, so that the enzyme may again try to
insert the correct base. This mechanism reduces the error rate by about two orders
of magnitude to the rate of 10−7. Errors that are not corrected by proofreading are
corrected after daughter strand synthesis by the MisMatch Repair mechanism
(MMR), which further reduces the error rate down to 1 error per 109−1010 base-pairs
per replication cycle. This process is well understood in Escherichia coli, although
substantial information is now available for the yeast and human systems as well
[26].
Evidence of mismatch repair was first observed in Streptococcus pneumoniae
bacteria. Following these studies, work on E. coli determined the genes that were
responsible from the activation of the mismatch repair mechanism. Specifically,
when these genes were rendered non-functional by mutations, higher mutation rates
were observed. Proteins that are active components of the mismatch repair process
are encoded by these genes and are therefore called the “Mut” proteins. There are
three essential proteins that detect the errors and activate the repair process: MutS,
MutH, MutL.
There are five steps in the mismatch repair process in E. Coli [25]:
1. MutS recognizes the mismatch pair and binds to it as a homodimer.
2. MutL binds to the MutS-DNA complex, also as homodimer.
3. The MutS - MutL complex moves in different directions along the DNA
molecule, thereby forming a loop in the DNA.
4. MutH binds to the MutS - MutL complex when the latest reaches a hemimethy-
lated “GATC” base sequence (on the parent strand), which may be located
on both sides of the mismatch as far as 1000 base pairs away. Then a nick is
made on the unmethylated “GATC” sequence.
11

5. The strands are separated by the UvrD helicase enzyme, and another cut is
introduced on the other side of the mismatch. Then, a correct base can be
inserted in the created gap.
Eukaryotic MMR mechanisms are far more complicated than those of E. coli.
In eukaryotes, five homologs of MutL and six homologs of MutS, which form het-
erodimers on mismatched DNA, are expressed. However, homologs of MutH only
appear in gram-negative bacteria (bacteria that do not retain crystal violet dye in
the Gram staining protocol. This is an experimental method to differentiate bacte-
ria into two large groups, based on the chemical and physical properties of their cell
walls). It suggests that the eukaryotes must have some other way of differentiating
the parental and daughter strands (the exact mechanism in eukaryotes remains un-
clear, but it is believed that it is connected to the presence of nicks in the daughter
strand during DNA replication).
Cells with a dysfunctional MMR mechanism have much higher than wild-type
mutation rates, and are therefore termed mutators. Under normal conditions, the
fraction of mutators in the population will be low, as they accumulate more delete-
rious mutations. Experiments have placed an upper bound of 0.1% on mismatch-
repair deficient strains of E. coli. However, under adverse conditions, because of
their higher adaptability, mutators can rise to a significant fraction of the popula-
tion, sometimes as high as 10− 30% [27] (and therein).
We are motivated to study the MMR mechanism for two main reasons:
• In bacteria, it is believed that the mutator strains play a major role in the
emergence of antibiotic drug resistance [27].
• In humans, mutations in the homologues of the Mut proteins are implicater in
most types of cancers. In particular, it is the cause of hereditary nonpolyposis
colon cancer (HNPCC) and has been implicated in the development of a subset
of sporadic tumors that occur in a variety of tissues [26].
12

2.1.2 Asexual and sexual pathways in Saccharomyces cerevisiae
Yeast can exist in two phases: A haploid phase and a diploid phase. In the haploid
phase, each cell carries one copy of the 17 chromosomes in its nucleus, whereas in
the diploid phase, there are two copies of each chromosome, each one coming from
a differen haploid cell [22]. Both the haploid and diploid cells have an elipsoidal
shape. The size of a haploid cell is approximately 4.76 (long axis) by 4.19 µm and
the size of the diploid cell is 6.01 by 5.06 µm. Thus, the volume of the diploid is
almost twice that of a haploid [22].
In the haploid phase, given sufficient nutrients, yeast reproduce through mitotic
cell division: The chromosomes are duplicated and then distributed between the
parent and daughter cells. In contrast to cell fission, a process in which the original
cell grows and then pinches off into two daughter cells (for instance in E. coli), yeast
grow by budding. Budding means that the daughter cell arises from the parent cell
and it is made of entirely new surface material.
The haploid yeast cell may be of two mating types, α or a, and it has the ability
to switch its mating type. When two haploids of different mating types are near each
other, they fuse and form a diploid cell [22]. In turn, the diploid cell undergoes a
meiosis division, a process by which four haploid cells are produced. There are three
essintial steps in this process. First, the chromosomes of a parent cell are replicated.
Then the first meiotic division occurs, resulting in two diploid cells. Finally, four
haploids are created by another meiotic division of the two diploids, which were
created in the previous step.
13

Figure 2: Asexual pathway in yeast. The replication of chromosomes is followed bymitotic division of the diploid cell.
2.2 The Molecular Quasispecies
2.2.1 Introduction
The theory of the molecular quasispecies was developed by Eigen in 1971 [28] in order
to describe evolutionary dynamics of self-replicating single-stranded RNA genomes,
which gave rise to cellular life. This theory, which takes the form of a system of
ordinary differential equations, was found to be relevant to in vitro studies of the
RNA virus Qβ-virus.
2.2.2 The quasispecies equations
We begin by assuming that each genome, denoted by σ, may be represented as a
string of length L of the form σ = {s1, s2, ..sL}, where each digit is chosen out of an
alphabet of size S. Thus, there are N = SL genomes forming the sequence space.
Given two sequences σi and σj, we may define the Hamming distance DH(σi, σj) to
be the number of digits by which one sequence differs from another.
Replication is modeled as a first-order growth process, and so we associate with
each genome σ a first-order growth rate constant, or fitness, κσ. The set {κσ}
14

Figure 3: Main steps of sexual pathway in yeast. Step 1: The chromosomes arereplicated. Step 2: First meiotic division. Step 3: Second meiotic division. Step 4:Fusion of haploids.
of all growth constants is termed the fitness landscape. Since different sequences
are differently suited to a given environment, in general the fitness landscape is
inhomogeneous. The fact that environmental conditions tend to change over time
makes the fitness landscape time-dependent.
During the replication process, each genome σ serves as template for its daughter
σ′. Due to replication being error-prone, the daughter genome may not be identical
to the parent genome. We denote by pm(σi, σj) the probability that, after replication,
genome σi produces daughter genome σj. Then, the number of genomes σi, denoted
by nσi , varies in time according to,
dnσidt
=N∑σj
κσjpm(σj, σi)nσj (1)
One must assume a large population so that the population numbers, which are
discrete quantities, can be described by continuous variables. This assumption is
justified in most molecular systems since, in a typical experiment, the number of
molecules involved is in the range of 1018 or more, and the fluctuations are pro-
15

portional to the square root of the number of molecules, which makes them hardly
detectable [28]. Furthermore, it is convenient to write the quasispecies equations in
terms of the population fractions xσi , which are defined as xσi = nσi/∑
j nσj :
nσi = xσi∑j
nσj + xi∑j
nj (2)
plugging eq. (2) into eq. (1) we obtain,
xσi =∑j
κσjpm(σj, σi)xσj − xσi∑
j nσj∑k nσk
(3)
We note that,
∑j
nσj =∑j
∑k
κσkpm(σk, σj)nσk =∑k
κσknσk (4)
so that eq. (3) may be written in terms of the mean fitness of the population, which
we define as
κ(t) =
∑k nσkκσk∑k nσk
(5)
as follows:
xσi =∑j
κσjpm(σi, σj)xσj − κ(t)xσi (6)
This system of equations is known as the quasispecies equations. These equation
may also be put into matrix form:
d~x
dt= A~x− (~κ · ~x)~x (7)
where ~x is the vector of population fractions, ~κ is the vector of population fitnesses
and A is the matrix of all mutation rates constants. Note that Ai,j = κσjpm(σi, σj)
and ~κ · ~x = κ(t). The diagonal terms of A comprise the effects of error-free replica-
tion, while the off-diagonal terms comprise the effect of mutations on the population
16

fractions.
2.2.3 Solutions of the rate equations
We woud like to solve the quasispecies equations (7). A detailed solution appears
in [28], whereas here we present the outline of the solution and the results. First,
we would like to remove the non-linear term κ(t). It can be done by the following
substitution:
xi(t) = zi(t)f(t) (8)
where the function f(t) is given by
f(t) = exp
[∫ t
0
κ(τ)dτ
](9)
yielding the differential equations in the coordinates z(t):
zi =∑k
Ai,kzk(t) (10)
f(t) may be expressed in terms of z(t) coordinates together with the normalization
condition∑
k xk(t) = 1 as follows:
f(t) =1∑
k zk(t)(11)
Once the solution of (10) is obtained, we can plug (11) back into (8) in order to
get the solution for the population fractions xi(t).
The solutions of the quasispecies equations may be expressed in terms of another
variable yi(t), as introduced in [28]. The meaning of these solutions becomes more
obvious in terms of these variables. The differential equations take the form,
yi(t) =[λi − λ(t)
]yi(t), (12)
17

where the mean eigenvalue equals the mean fitness: λ(t) =∑
k κσkxk. The variables
yi(t) are directly related to the normal modes of the population fractions xi(t) (xi(t)
are linear combinations of yi(t)). They are, like the xi(t), normalized to 1, that is∑k yk(t) = 1.
With these new variables, we are actually looking at N combinations of se-
quences, rather than N distinct sequences. These combinations compete for selec-
tion: those with λi < λ(t) have a negative growth and will eventualy die out; those
combinations with λi > λ(t) will survive. The combination with the largest eigen-
value λmax ≡ λ0 will win the competition. The mean fitness of the population will
grow as a function of time, until it is equal to the maximum eigenvalue λ0, so that
only one combination is left. This stable combination is termed the quasispecies.
The quasispecies equations may be solved explicitly, given specific mutation rates
Aij [28]. However, if the off-diagonal terms in A are small compared to the diagonal
terms, and the diagonal terms can be brought into some hierarchical order, where
Amm > Akk for any k, second-order perturbation theory may be used in order to
find the largest eigenvalue λ0 and the corresponding eigenvector I0 [28],
λ0 = Amm +∑k 6=m
AmkAkmAmm − Akk (13)
and the dominant eigenvector I0,
lk0lm0
=Akm
Amm − Akk +∑j 6=k,m
AkjAjm(Amm − Akk)(Amm − Ajj) (14)
2.2.4 Single fitness-peak landscape
In this thesis, we are particularly interested in the single fitness-peak landscape, in
which there is some master sequence σ0 with growth constant κσ0 = k > 1, and all
other sequences have a growth constant of 1, that is, κσ 6=σ0 = 1. In this section,
we present some results of the quasispecies theory in a static environment, which
are relevent to our work. These results may be found in [27] (Review), giving the
18

solution of the single fitness-peak landscape in the limit of infinite sequence length
L and small mutation rates ε, such that the product εL = µ is kept constant.
At steady state, the mean fitness of the population is given by,
κ(t =∞) =
ke−µ if µ < µcrit;
1 if µ > µcrit.(15)
where µcrit is given by µcrit = ln k. The fraction of viable organisms, i.e., organisms
that carry the master sequence, is given by,
x0 =
ke−µ−1k−1
if µ < µcrit;
0 if µ > µcrit.(16)
The behaviour of such a system is best understood in terms of the localization
length parameter, which is defined as,
〈l〉 =∑σ
DH(σ, σ0)xσ (17)
This parameter measures the mean number of mutations by which the population
differs from the master sequence. It may be shown that the localization length is
given by [27]
〈l〉 =
µ ke−µke−µ−1
if µ < µcrit;
∞ if µ > µcrit.(18)
The localization length is finite when µ < µcrit, meaning that the population is
concentrated around the master sequence, i.e. localized, whereas for µ > µcrit the
mutation rate is too high and no viable quasispecies can exist, and the popula-
tion delocalizes over the entire sequence space. This transition from localization to
delocalization is termed the error catastrophe.
Even though these expressions were developed in the infinite sequence length
limit, they may well be used in the finite case. Figure 4 compares the solutions of
the quasispecies equations obtained by second-order perturbation theory, for which
19

Figure 4: Comparison of solutions of the quasispecies equations for the single fitness-peak landscape. Solutions of second-order perturbation theory given by equations(13) and (14), and the infinite sequence limit, given by equations (15) and (16). Thecalculation was carried out with the following set of parameters: L = 10, S = 2,k = 10.
we used equations (13) and (14), and the infinite sequence solution, which is given by
equations (15) and (16). The upper figure in 4 shows the steady-state mean fitness of
the population, κ, as a function of mutation rate ε, whereas the bottom figure shows
the fraction of viable organism as a function of the mutation rate. For sufficiently
low mutation rates we obtain a good agreement between the two solutions.
20

3 MMR (MisMatch Repair) Mechanism
In this part of the thesis, we would like to extend a previous work that has been done
on the evolution of quasispecies in time-dependent single fitness-peak landscapes
[29], to account for the effect of mutators.
Our population consists of organisms which have two-gene genomes denoted by
σ = σviaσrep, where σvia is the part of the genome that controls the viability of
the organism, i.e. its reproduction rate, and σrep is a part of the genome which is
responsible for activating the MMR mechanism. σvia contains Lvia bases and σrep
contains Lrep bases, so that the total size of the genome is L = Lvia+Lrep. Each base
is chosen from an alphabet of size S. The general scheme of replication is depicted
in figure 5.
We assume that there is one high fitness-sequence, the master sequence σvia,0, in
an otherwise flat landscape. Thus the fitness of a given organism is determined by:
κσ =
k if σvia = σvia,0;
1 otherwise.(19)
that is, if the sequence that controls viability of a given organism is equal to the
master sequence, its first-order growth constant will be k. In any other case the first-
order growth constant will be equal to 1. The functionality of the MMR mechanism
is modeled in an analogous manner:
εσ =
εεr if σrep = σrep,0;
ε otherwise.(20)
where ε is the per-base replication error probability and εr is the per-base repair
failure probability, meaning that working MMR mechanism corresponds to some
sequence σrep,0, in which case the per-base mutation rate is decreased by a factor of
εr.
The dynamic landscape is created by making σvia,0 time-dependent. We move
21

Figure 5: The replication scheme of a haploid cell. Each genome contains tworegions: A region that controls viability, denoted by σvia, and a region that controlsrepair, denoted by σrep, both of arbitrary length. In the case shown in the figure,the viability region was hit by a mutation during the replication process, while theparent genome remained unchanged.
it to one of its nearest neighbors (point-mutation) in the sequence space (chosen
randomly) at regular time intervals τ . In terms of the parameters defined above
we would like to answer the following question: Under what conditions, that is, for
what values of mutation rate ε and cycle length τ will our population will adapt
to the dynamic environment? Put in another way, for what parameter values will
the quasispecies cloud follow the moving fitness peak? In particular, as mentioned
above, we are interested in deriving an analytical expression for the fraction of viable
mutators. The statement of the problem is schematically depicted in figure 6.
Further details of the analytical model, stochastic simulations and the results
appear in:
P. Gorodetsky and E. Tannenbaum, ”The Effect of Mutators on Adaptability in
Time-Varying Fitness Landscapes”, Phys. Rev. E 77, 042901 (2008)
which is also attached as an appendix to this thesis.
22

Figure 6: Illustration of a dynamic fitness landscape and statement of the problem.After each time interval τ we move the master sequence one point-mutation in thesequence space. The problem we wish to solve is whether or not the “quasispeciescloud” will follow the landscape peak.
4 Maintenance of Sexual Reproduction
4.1 Description of the model
In order to analyze asexual and sexual replication in unicellular organisms, we begin
by assuming a unicellular population of replicating organisms, where each organism
has a two-chromosome genome, and each chromosome is taken to be of length L,
where each base is chosen from an alphabet of size S (for simplicity we are assuming
single-stranded genomes). A chromosome is taken to be functional, or viable, if its
base sequence is identical to some “master” sequence σ0. Otherwise, the chromo-
some is non-functional, or unviable. The first-order growth rate constant, or fitness,
of an organism is then determined by the number of functional and non-functional
chromosomes in its genome. κvv denotes the fitness of an organism with two func-
tional chromosomes, κvu denotes the fitness of an organism with one functional and
one non-functional chromosome, and κuu denotes the fitness of an organism with
two non-functional chromosomes. It is assumed that κvv > κvu > κuu. It should
be noted that, in the language of population genetics, we are considering what is
23

known as a single-locus model.
We also assume that the master sequence shifts by a single point-mutation after
every time τ (see Fig. 6). It is assumed that the point-mutation occurs in an un-
mutated portion of the genome, so that the master sequences move further away
in sequence space from the original master sequence [29]. A static landscape is
obtained by taking the limit τ →∞.
During the mitotic cell division for the case of asexual reproduction, each of the
parent chromosomes replicate, and the resulting pairs segregate into the daughter
cells, where each cell receives one of the chromosomes from each pair. It is assumed
that replication is not error-free, so that there is a per-base error probability ε.
For sexual reproduction, the diploid cell divides into two diploids via the normal
mitotic pathway described above, after which each of the diploids divide into two
haploids, producing a total of four haploids [20, 21, 22, 23]. These haploids enter
a haploid pool, where they fuse with other haploids to produce diploids that then
repeat the life cycle. It is assumed that haploid fusion is random, and is characterized
by a second-order rate constant γ. Furthermore, it is assumed that the population
density ρ, defined as the total number of diploids plus half the number of haploids,
divided by the total volume V , remains constant.
The evolution of the asexual and sexual populations may be simulated stochas-
tically in a chemostat-type model [27], where a fixed total population of organisms
undergoes reproduction and mutation according to probabilities defined by the first-
order growth rate constants and error probabilities defined above. The per-organism
reproduction probability per time step is κrs=vv,vu,uu∆t, where κrs is the fitness of
the organism, and ∆t is the simulation time step. For the sexual case, it is also
necessary to consider haploid fusion, which occurs with a pairwise probability that
is given by(γV
)∆t. Organisms are randomly removed at each time step in order to
maintain a constant population size.
The evolutionary dynamics of the asexual and sexual populations may each be
accurately described by respective systems of ordinary differential equations. For the
24

asexual population, we define nvv to be the number of organisms with two functional
chromosomes, nvv1 to be the number of organisms with one functional chromosome
and one chromosome that will be functional after the next peak shift, nvu to be the
number of organisms with one functional and one non-functional chromosome, nv1v1
to be the number of organisms where both chromosomes will be functional after the
next peak shift, nv1uto be the number of organisms where one chromosome will be
functional after the next peak shift and one chromosome is non-functional, and nuu
to be the number of organisms with two non-functional chromosomes (note that a v1
chromosome is also non-functional, but we place it in a separate category from the
other non-functional chromosomes, since it will become functional after one peak
shift). For the sexual population, the diploid population numbers are defined as for
the asexual population. In addition, we also define haploid population numbers nv,
nv1 , nu.
The probability that a given chromosome is replicated correctly is p = (1− ε)L,
and the probability that a given chromosome produces a daughter with a specific
sequence that differs from the parent by a single point-mutation is q = εS−1
(1−ε)L−1.
We also assume that the genomes are sufficiently long that backmutations may be
neglected, so that a “u” parent chromosome only produces “u” daughters.
With these approximations, the asexual population is governed by the following
25

system of ordinary differential equations:
dnvvdt
= [1
2(1 + p)2 − 1]κvvnvv +
1
2q(1 + p)κvunvv1 +
1
2q2κuunv1v1
dnvv1dt
= q(1 + p)κvvnvv + {1
2[(1 + p)2 + q2]− 1}κvunvv1 + q(1 + p)κuunv1v1
dnv1v1dt
=1
2q2κvvnvv +
1
2q(1 + p)κvunvv1 + [
1
2(1 + p)2 − 1]κuunv1v1
dnvudt
= (1− p− q)(1− p)κvvnvv +1
2[1− (p+ q)2]κvunvv1 + q(1− p− q)κuunv1v1
+ pκvunvu + qκuunv1u
dnv1udt
= q(1− p− q)κvvnvv +1
2[1− (p+ q)2]κvunvv1 + (1− p− q)(1 + p)κuunv1v1
+ (1− p− q)(1 + p)κuunv1v1 + qκvunvu + pκuunv1u
dnuudt
=1
2(1− p− q)2κvvnvv +
1
2(1− p− q)2κvunvv1 +
1
2(1− p− q)2κuunv1v1
+ (1− p− q)κvunvu + (1− p− q)κuunv1u + κuunuu
(21)
while the sexual population is governed by the following system of ordinary differ-
26

ential equations:
dnvvdt
= −κvvnvv +1
2
γρ
nn2v
dnvv1dt
= −κvunvv1 +γρ
nnvnv1
dnvudt
= −κvunvu +γρ
nnvnu
dnv1v1dt
= −κuunv1v1 +1
2
γρ
nn2v1
dnv1udt
= −κuunv1u +γρ
nnv1nu
dnuudt
= −κuunuu +1
2
γρ
nn2u
dnvdt
= 2(1 + p)κvvnvv + (1 + p+ q)κvunvv1 + (1 + p)κvunvu
+ 2qκuunv1v1 + qκuunv1u −γρ
nnv(nv + nv1 + nu)
dnv1dt
= 2qκvvnvv + (1 + p+ q)κvv1nvv1 + qκvunvu + 2(1 + p)κuunv1v1
+ (1 + p)κuunv1u −γρ
nnv1(nv + nv1 + nu)
dnudt
= 2(1− p− q)κvvnvv + 2(1− p− q)κvunvv1 + (2− p− q)κvunvu
+ 2(1− p− q)κuunv1v1 + (3− p− q)κuu
(22)
Let us rewrite the equations for the sexual population dynamics in the γρ→∞limit. In this limit, the cost for sex is zero, meaning that there are no haploids in
the population, since the efficency of the gametes’ fusion is close to 100% [22]. We
begin with defining haploid population fractions xi = ni/nH , where nH is the total
number of haploids. The haploid equations of (22) take the following form:
0 = Qv − γρ
nn2Hxv
0 = Qv1 −γρ
nn2Hxv1
0 = Qu − γρ
nn2Hxu
(23)
27

where the parameters Qi are given by,
Qv = κvvnvv [2(1 + p)] + κvunvv1 [1 + p+ q] + κvunvu [1 + p]
+ κuunv1v1 [2q] + κuunv1u [q]
Qv1 = κvvnvv [2q] + κvunvv1 [1 + p+ q] + κvunvu [q]
+ κuunv1v1 [2(1 + p)] + κuunv1u [1 + p]
Qu = κvvnvv [2(1− p− q)] + κvunvv1 [2(1− p− q)] + κvunvu [3− p− q]
+ κuunv1v1 [2(1− p− q)] + κuunv1u [3− p− q] + κuunuu · 4
(24)
Now we can express the haploid population fractions in terms of the Qi param-
eters:
xv =Qv
QT
xv1 =Qv1
QT
xu =Qu
QT
(25)
where QT is given by QT ≡ Qv + Qv1 + Qu = γρnn2H . With these definitions the
dynamics of the sexual population is governed by the following system of differential
equations:
dnvvdt
= −κvvnvv +1
2
Q2v
QT
dnvv1dt
= −κvv1nvv1 +QvQv1
QT
dnvudt
= −κvunvu +QvQu
QT
dnv1v1dt
= −κuunv1v1 +1
2
Q2v1
QT
dnv1udt
= −κuunv1u +Qv1Qu
QT
dnuudt
= −κuunuu +1
2
Q2u
QT
(26)
28

After a peak shift at time kτ , the population numbers are re-defined via,
nvv(kτ) = limt→kτ,t<kτnv1v1(t)
nvv1(kτ) = 0
nv1v1(kτ) = 0
nvu(kτ) = limt→kτ,t<kτ [nv1u(t) + nv1u(t)]
nv1u(kτ) = 0
nuu(kτ) = limt→kτ,t<kτ [nvv(t) + nvu(t) + nuu(t)]
(27)
4.2 Results
The analytical model was solved numerically using the Runge-Kutta45 solver. We
find that the approximate solutions of the asexual and sexual evolutionary dynamics
defined by Eq. (21) and (22) agree well with stochastic simulations of the exact model
(see Figures 7 and 8). Therefore, the approximate model may be used to analyze
the asexual and sexual reproduction pathways being considered in this thesis.
After a sufficient number of iterations, the ratios between the various population
numbers reach a periodic solution. The criterion for determining whether the asexual
population succeeds in adapting on this dynamic landscape is then given by the
criterion,
nvv((k + 1)τ) + nvu((k + 1)τ)
nvv(kτ) + nvu(kτ)> eκuuτ (28)
since the population will only adapt if the organisms with viable chromosomes grow
faster than the unviable organisms between the peak shifts [29]. The criterion for
adaptability for the sexual population is identical, provided that γρ is sufficiently
large that the size of the haploid population is negligible (i.e. if γρ→∞).
If both the asexual and sexual populations survive on the dynamic landscape,
then it is necessary to compare which strategy out-competes the other. This is done
by measuring the overall per capita growth of each population in between peak
shifts, which is given by, exp[∫ (k+1)τ
kτκ(t)dt
], where κ(t) is the mean fitness of the
population, and is simply the first-order growth rate constant of the population as
29

0 5 10 15 20 25 30 35 40 45 500
1
2
3
4
5
6
7
8
9
10
time [a.u.]
Mea
n Fi
tnes
s
simulatedanalyticalstatic landscape
Figure 7: Adaptation of the asexual population on a dynamic landscape, simulatedusing both the approximate system of differential equations and the stochastic sim-ulations. The plot shows the mean fitness of the population as a function of time.Note that the time between peak shifts is sufficiently large that the population isable to reach the steady-state mean fitness (“static landscape” line), which is thesame as predicted by theory [24]. Parameter values are L = 20, S = 4, ε = 0.01,τ = 5, κvv = 10, κvu = 5, κuu = 0.1, and the total population size is 30, 000.
30

a whole at the given time t. The population with the larger per capita growth is
the one with the advantageous reproduction strategy [27].
Figure 9 illustrates regimes where the asexual and sexual populations adapt as
a function of both ε and τ . Note that the sexual population always adapts more
rapidly than the asexual population (other figures with other parameter values give
similar results).
Figure 10 shows plots of the mean fitness as a function of time for both the
asexual and sexual populations, for parameter values where both populations adapt
according to Figure 9. Note that the sexual population is clearly adapting to the
landscape more quickly than the asexual population.
In a static environment, it has been previously shown that the asexual mean
fitness at steady state is given by [24]
φa = max[1
2(1 + p)2 − 1, αp] (29)
while the sexual mean fitness at steady-state is given by [24]
[φs + 1][φs − αp][φs(1− 2α) + αp]− 1
2(1 + p)2(1− α)2φ2
s = 0 (30)
where φa and φs are simply the steady-state mean fitnesses of the asexual and
sexual populations respectively, normalized by the fitness of the wild-type, and α =
κvu/κvv. From these expressions it is possible to show that the sexual population
has a higher steady-state mean fitness than the asexual population[24].
31

0 5 10 15 20 25 30 35 40 45 500
1
2
3
4
5
6
7
8
9
10
time [a.u.]
Mea
n Fi
tnes
s
simulatedanalyticalstatic landscape
Figure 8: Adaptation of the sexual population on a dynamic landscape, simulatedusing both the approximate system of differential equations and the stochastic sim-ulations. The plot shows the mean fitness of the population as a function of time.Note that the time between peak shifts is sufficiently large that the population isable to reach the steady-state mean fitness (“static landscape” line), which is thesame as predicted by theory [18]. Parameter values are L = 20, S = 4, ε = 0.01,τ = 5, κvv = 10, κvu = 5, κuu = 0.1, and the total population size is 30, 000.
32

! [a.u.]
"
1 2 3 4 5 6 7 8 9 10
0
0.02
0.04
0.06
0.08
0.1
0.12
asexualsexual
Figure 9: Illustration of the regions of adaptability for both the asexual and sexualpopulations. The blue continuous line defines the boundary separating the regionswhere the sexual population adapts, colored black and white, and where the sexualpopulation does not adapt, colored grey. The red line defines an analogous boundaryfor the asexual population, except that the asexual population only adapts in thewhite colored region. In the black colored region, the asexual population does notadapt, while the sexual population does. Furthermore, although both the asexualand sexual population adapt in the white region, the sexual population does so morequickly than the asexual population, and so the sexual population out-competes theasexual population in this regime. There is therefore no region where the asexualpopulation out-competes the sexual population. Parameter values are L = 20,S = 4, ε = 0.01, κvv = 10, κvu = 5, κuu = 0.1, and we assume that γρ is sufficientlylarge that the population spends a negligible amount of time in the haploid phase.
33

0 2 4 6 8 10 12 14 16 18 200
1
2
3
4
5
6
7
8
9
10
time [a.u.]
Mea
n Fi
tnes
s
sexualasexual
Figure 10: Comparison of the evolutionary dynamics of the asexual and sexualpopulations on the dynamic fitness landscape. The plot is of the mean fitness forboth populations, generated via stochastic simulations. The parameter regimes aresuch that both populations adapt to the landscape. However, note that the sexualpopulation adapts more quickly. The parameter values are L = 20, S = 4, ε = 0.01,τ = 2, κvv = 10, κvu = 5, κuu = 0.1.
34

5 Discussion
We have demonstrated how the quasispecies framework may be applied to problems
in evolutionary dynamics. In the first part of this thesis, we developed a model for
the effect of mutators on adaptability of populations in dynamic environments, in a
point-mutation limit. We were able to solve the model analytically, and for the first
time to give an analytical expression for estimating the fraction of viable mutators
as a function of genome length L, mutation rate ε and the length of the cycle τ .
We obtained good agreement between the point-mutation model and the sim-
ulation for sufficiently small mutation rates ε. This agreement breaks down as we
increase ε, because when ε is small, the n00 → n01, n00 → n10 and n01 → n11 transi-
tion probabilities are all first order in ε, while the transition probability n00 → n11
is second-order in ε, and therefore may be neglected in a first-order approximation.
This is not the case for large ε, so if we wish to use point-mutation models for large
ε, we must count for additional transition probabilities.
For future research, we would like to develop models without any assumptions
about the mutation rate, that will correctly predict the fraction of mutators in the
population in a dynamic fitness landscape. Furthermore, we would like to develop
models that will reflect the stochastic nature of the evolutionary dynamics.
In the second part of this thesis, we extended the model of sexual and asexual
reproduction pathways in yeast that appear in [24], to the dynamic case. The
results of our work and in [24] serve to reconcile two sets of experiments exploring
the selective advantage for sex in S. cerevisiae [15, 19]. In [15], the authors concluded
that the purpose of sex is to purge deleterious mutations, while in [19] the authors
concluded that sex speeds adaptation to a new environment. Our work suggests
that sex serves a dual role, so that both interpretations in [15, 19] are correct.
35

References
[1] Emmanuel Tannenbaum, Eric J. Deeds, and Eugene I. Shakhnovich. Equilib-
rium distribution of mutators in the single fitness peak model. Phys. Rev. Lett.,
91(13):138105, Sep 2003.
[2] Emmanuel Tannenbaum and Eugene I. Shakhnovich. Error and repair catas-
trophes: A two-dimensional phase diagram in the quasispecies model. Phys.
Rev. E, 69(1):011902, Jan 2004.
[3] Akira Sasaki and Martin A. Nowak. Mutation landscapes. Journal of Theoret-
ical Biology, 224(2):241 – 247, 2003.
[4] David A. Kessler and Herbert Levine. Mutator dynamics on a smooth evolu-
tionary landscape. Phys. Rev. Lett., 80(9):2012–2015, Mar 1998.
[5] E. R. Travis J. M. J. Travis. Mutator dynamics in fluctuating environments.
269:591– 597, 03 2002.
[6] PR Painter. Mutator genes and selection for mutation rate in bacteria. Genetics,
79(4):649–660, 1975.
[7] PD Sniegowski, PJ Gerrish, and RE Lenski. Evolution of high mutation rates
in experimental populations of E-coli. NATURE, 387(6634):703–705, JUN 12
1997.
[8] Michael E. Palmer and Marc Lipsitch. The Influence of Hitchhiking and Dele-
terious Mutation Upon Asexual Mutation Rates. Genetics, 173(1):461–472,
2006.
[9] Alexey S Kondrashov. Deleterious mutations and the evolution of sexual re-
production. Nature, 336:435–440, 1988.
[10] G C Williams. Sex and evolution. Princeton, 1st edition, 1975.
36

[11] R E Michod. Eros and evolution: A natural philosophy of sex. Addison-Wesley,
New York, 1st edition, 1995.
[12] J H Muller. The relation of recombination to mutational advance. Mutation
Research, 1:2–9, 1964.
[13] Byerly H C Hopf F A Bernstein, H and R E Michod. Origin of sex. J. Theor.
Biol., 110:323–351, 1984.
[14] Richard E Michod Aurora M Nedelcu, Oana Marcu. Sex as a response to
oxidative stress: a twofold increase in cellular reactive oxygen species activates
sex genes. Proceedings of the Royal Society B: Biological Sciences, 227:1591–
1596, 2004.
[15] C Zeyl and G Bell. The advantage of sex in evolving yeast populations. Nature
(London), 388:465–468, 1997.
[16] P D Keightley and S P Otto. Interference among deleterious mutations favours
sex and recombination in finite populations. Nature (London), 443:89–92, 2006.
[17] W D Hamilton, R Axelrod, and R Tanese. Sexual reproduction as an adaptation
to resist parasites (a review). Proceedings of the National Academy of Sciences
of the United States of America, 87(9):3566–3573, 1990.
[18] R.S. Howard and C.M. Lively. Parasitism, mutation accumulation, and the
maintenance of sex. Nature (London), 367:554–557, 1994.
[19] Godfray H.C. Goddard, M. R. and A. Burt. Sex increases the efficacy of natural
selection in experimental yeast populations. Nature (London), 434:636–640,
2005.
[20] B De Massy, F Baudat, and A Nicolas. Initiation of recombination in Sac-
charomyces cerevisiae haploid meiosis. Proceedings of the National Academy of
Sciences of the United States of America, 91(25):11929–11933, 1994.
37

[21] Sarah P Otto Barbara K Mable. The evolution of life cycles with haploid and
diploid phases. BioEssays, 20(6):453–462, 1998.
[22] I Herskowitz. Life cycle of the budding yeast Saccharomyces cerevisiae. Micro-
biol. Mol. Biol. Rev., 52(4):536–553, 1988.
[23] G S Roeder. Sex and the single cell: meiosis in yeast. Proceedings of the
National Academy of Sciences of the United States of America, 92(23):10450–
10456, 1995.
[24] Emmanuel Tannenbaum. A comparison of sexual and asexual replication strate-
gies in a simplified model based on the yeast life cycle. Theory in Biosciences,
127:323–333, 2008.
[25] D Voet and J G Voet. Biochemistry. Wiley, 3rd edition, 2004.
[26] Ravi R Iyer, Anna Pluciennik, Vickers Burdett, and Paul L Modrich. Dna
mismatch repair: Functions and mechanisms. Chemical Reviews, 106(2):302–
323, 2006.
[27] Emmanuel Tannenbaum and Eugene I Shakhnovich. Semiconservative repli-
cation, genetic repair, and many-gened genomes: Extending the quasispecies
paradigm to living systems. Physics of Life Reviews, 2(4):290 – 317, 2005.
[28] Manfred Eigen. Selforganization of matter and the evolution of biological
macromolecules. Naturwissenschaften, 58:465–523.
[29] Martin Nilsson and Nigel Snoad. Error thresholds for quasispecies on dynamic
fitness landscapes. Phys. Rev. Lett., 84(1):191–194, Jan 2000.
38

Effect of mutators on adaptability in time-varying fitness landscapes
Pavel Gorodetsky* and Emmanuel Tannenbaum†
Ben-Gurion University of the Negev, Be’er-Sheva, Israel�Received 15 January 2008; published 10 April 2008�
This Brief Report studies the quasispecies dynamics of a population capable of genetic repair evolving on atime-dependent fitness landscape. We develop a model that considers an asexual population of single-stranded,conservatively replicating genomes, whose only source of genetic variation is due to copying errors duringreplication. We consider a time-dependent, single-fitness-peak landscape where the master sequence changesby a single point mutation at every time �. We are able to analytically solve for the evolutionary dynamics ofthe population in the point-mutation limit. In particular, our model provides an analytical expression for thefraction of mutators in the dynamic fitness landscape that agrees well with results from stochastic simulations.
DOI: 10.1103/PhysRevE.77.042901 PACS number�s�: 87.23.Kg
Genetic repair plays an important role in maintaining theintegrity of nearly all organismal genomes �1�. An importantrepair mechanism is mismatch repair �MMR�, which is ofparticular interest to evolutionary biologists, because it isbelieved that mismatch-repair-deficient strains, or mutators,play a crucial role in the emergence of antibiotic drug resis-tance, and also act as gateway cells for the emergence ofcancer �2� �and references therein�.
In static environments, mutators are generally a relativelysmall fraction of the population �3�, because their higher thanwild-type mutation rate means that they accumulate deleteri-ous mutations more quickly than nonmutators. However, indynamic environments, mutators can adapt more quicklythan nonmutators, and so can rise to relatively large fractionsof the population. Experimentally, it is known that in staticenvironments the mutator fraction of Escherichia coli is onthe order of 0.1%, while pathogenic strains under pressure torespond to an adaptive immune system can have mutatorfractions on the order of 10% or more �3�.
Because of their importance, mutators have been the sub-ject of considerable experimental and theoretical work�2,4–10�. Theoretical work on the subject has consisted bothof numerical studies modeling the evolution of mutation ratein time-varying environments, as well as analytical workmodeling how mutators influence adaptation to a new envi-ronment.
In this Brief Report, we develop an analytically solvablemodel describing the influence of mutators on adaptation intime-varying environments. Such a model is an extension ofprevious analytical work on the subject, which focused eitheron adaptation to a new, but static, environment �6,8�, or onadaptation in environments that alternate between two states�10�. This Brief Report is also an extension of previous nu-merical work, in that we provide approximate analytical ex-pressions for the fraction of mutators in dynamic environ-ments. The work here therefore provides a starting point forunderstanding the role of mutators in environments wherecoevolutionary dynamics is important, as is the case with anadaptive immune system.
An analytically solvable model describing quasispeciesevolution in a dynamic fitness landscape was first developedin �11�. Following the approach in �11�, we assume a single-peak-fitness landscape in which there is one high-fitness se-quence, the master sequence �via,0, in an otherwise flat land-scape. We also assume that there exists a sequence �rep,0which corresponds to a working MMR mechanism. Our or-ganisms then have genomes that may be denoted by �=�via�rep, where �via is the genome region that controls vi-ability and �rep is a region that controls repair. Each base ofthe genome is chosen from an alphabet of size S �=4 forknown terrestrial life�.
�via consists of Lvia bases, and �rep consists of Lrep bases,so that the total genome length is L=Lvia+Lrep. Note that weare essentially considering a two-locus model, which is theapproach taken by previous authors �6,8�. The differencehere is that we are assuming master-sequence-based fitnessand “repair” landscapes, so that, in contrast to previouswork, various transition probabilities do not need to be con-sidered as independent variables, but rather may be com-puted from per base error probabilities and sequence lengths.
A viable organism, i.e., an organism for which �via=�via,0, has a first-order growth rate constant ��=k�1,while for an unviable organism, ��=1. We define a repairlandscape in an analogous manner: ��=�r� for organismswith �rep=�rep,0 and ��=� otherwise, where � is the per basereplication error probability and �r is the per base repair errorprobability.
To create a dynamic landscape, we move the fitness peakin the genotype space to one of its nearest neighbors �chosenrandomly� at regular time intervals �. We then define theparameters n00, n01, n10, and n11 as follows: n00 is the numberof viable nonmutators, n01 is the number of viable mutators,n10 is the number of nonmutators that will be viable after thenext peak shift, and n11 is the number of mutators that will beviable after the next peak shift.
We assume that � is sufficiently small that only point mu-tations are important, and we also assume that n10 and n11 arezero immediately after a peak shift. That is, when the fitnesspeak shifts to a new master sequence, the number of organ-isms that will be viable after the next peak shift is assumedto be negligible. It should also be noted that we neglect back-mutations, since we assume that the sequence lengths aresufficiently long that the probability of a mutation occurring
*[email protected]†[email protected]
PHYSICAL REVIEW E 77, 042901 �2008�
1539-3755/2008/77�4�/042901�4� ©2008 The American Physical Society042901-1

at a base that has already undergone mutation is negligiblysmall.
Based on these assumptions, we have that, during the timeinterval �n� , �n+1��� immediately following the nth peakshift, the quasispecies equations take the form
d
dt�n00
n01
n10
n11
� =�C1 0 0 0
C3 C2 0 0
C5 0 C4 0
0 C7 C8 C6
��n00
n01
n10
n11
� , �1�
where the Ci coefficients are defined as
C1 = k�1 − ��r�L
C2 = k�1 − ��Lvia,
C3 = k�1 − ��r�Lvia�1 − �1 − ��r�Lrep� ,
C4 = �1 − ��r�L,
C5 =k��r
S − 1�1 − ��r�L−1,
C6 = �1 − ��Lvia,
C7 =k�
S − 1�1 − ��Lvia−1,
C8 = �1 − ��r�Lvia�1 − �1 − ��r�Lrep� . �2�
We may solve Eq. �1� for t� �n� , �n+1�t� with the initialconditions n10�n��=n11�n��=0. Noting that at t= �n+1�� thefitness peak shifts to the next master sequence, we have
n00„�n + 1��… = A10���n00�n�� ,
n01��n + 1��� = A11���n00�n�� + B11���n01�n�� , �3�
where the coefficients A10���, A11���, and B11��� are given by
A10��� =�ek�C4 − e�C4�C5
�k − 1�C4,
A11��� =�e�C4 − ek�C4�C5C6C8
�k − 1��C4 − C6��kC4 − C6�C4
+k�e�C6 − ek�C6�C4C7C8
�k − 1��C4 − C6��kC4 − C6�C6
+�ek�C4 − e�C6 + k�e�C6 − e�C4��C5C8
�k − 1��C4 − C6��kC4 − C6�
+��k − 1�ek�C4 − ke�C6 + ek�C6�C7C8
�k − 1��C4 − C6��kC4 − C6�C4C6,
B11��� =�ek�C6 − e�C6�C7
�k − 1�C6. �4�
Let us denote by rn the ratio of viable mutators to viablenonmutators immediately following the nth peak shift. Thenfrom the solution given above we have
rn+1 = ���� + ����rn, �5�
where �����A11��� /A10��� and ����=B11��� /A10���, fromwhich it can be shown that rn=�����i=0
n−1������i+�n���r0. If0��1, then, as n→, we obtain that r� limn→ rn
=A11���
A10���−B11��� , which implies a periodic solution where thefraction of viable organisms that are nonmutators at the be-ginning of each cycle is nonzero. When ��1 we obtain thatrn diverges, and so the fraction of viable organisms that aremutators goes to 1. This phenomenon is known as the repaircatastrophe �2�.
For the periodic solution that develops after a sufficientnumber of iterations, the fraction of viable organisms that aremutators at the beginning of a peak shift is then r / �1+r�.As �→, it may be readily shown that the fraction of viableorganisms that are mutators just before the next peak shift isgiven by the static landscape expression obtained in �4�.
In order for the population to form a stable quasispeciesand remain viable in the time-varying landscape, the relativegrowth of the viable population between the peak shiftsshould be larger than that of the background �genome se-quences some distance away from the master sequence�.Since the growth constant of nonviable organisms is equal to1, the criterion for adaptability is given by
n00„�n + 1��… + n01„�n + 1��…n00�n�� + n01�n��
� e�. �6�
If this condition is not met there will be a drift from themaster sequence to the “background,” corresponding to theerror catastrophe.
When the fraction of viable organisms that are nonmuta-tors is nonzero, Eq. �6� may be shown to be equivalent to
�nm �k
k − 1
��r
1 − ��r
e�k�1 − ��r�L−1�� − e��1 − ��r�
L−1��
S − 1� 1,
�7�
while when the fraction of viable organisms that are nonmu-tators is zero, i.e., when the population has undergone therepair catastrophe, Eq. �6� may be shown to be equivalent to
�m �k
k − 1
�
1 − �
e�k�1 − ��Lvia−1�� − e��1 − ��Lvia−1��
S − 1� 1. �8�
We may define three distinct parameter regimes, each corre-sponding to the viability or nonviability of the nonmutatorand mutator populations, respectively.
The first region is defined by �nm�1,�m. Here, the non-mutators’ effective growth rate is larger than both that of thebackground and that of the mutators, so that a stable qua-sispecies is formed with a nonzero fraction of viable nonmu-tators.
The second region is defined by �m�1,�nm. Here the
BRIEF REPORTS PHYSICAL REVIEW E 77, 042901 �2008�
042901-2

mutators’ effective growth is larger than both that of thebackground and that of the nonmutators, so that a stablequasispecies is formed, but it consists entirely of mutators.The transition between the first and second regions corre-sponds to a localization to delocalization transition over therepair portion of the genome that is termed the repair catas-trophe �2�.
Finally, the third region is defined by �nm ,�m1, so thatno stable quasispecies forms, and the population is unable toadapt to the changing fitness landscape.
The solutions to the equations �nm ,�m=1 set the upperand lower mutation thresholds for the population to survive�see Fig. 1�. The upper mutation threshold is the ordinaryerror catastrophe for the static landscape, while the lowerthreshold appears only in the case of a dynamic landscape.This lower threshold arises because, in a dynamic fitnesslandscape, the mutation rate must have a minimal value toallow the population to adapt. Below this dynamic errorthreshold, the population is unable to adapt, and so no stablequasispecies is formed �11�.
There is some minimal value of �, denoted �min, belowwhich the population cannot adapt. This corresponds to athreshold rate of change of the fitness landscape above whichthe population cannot adapt, irrespective of the error thresh-old. This minimal value for � arises because, as � is de-creased, the mutation rate must increase to maintain a stablequasispecies. Once this minimal mutation rate exceeds thestatic error threshold, then no quasispecies can exist.
An analytical approximation for �min can be found by ex-panding Eq. �8� to second order in �, solving for �, and thensolving for the value of � where the two solutions are equal.Assuming that k is sufficiently larger than 1, and that � issufficiently large, so that ek��e�, we obtain that �min�1 /k�ln�4�k−1��S−1�Lvia�.
An � versus � plot of the solution to the equation �nm=�m yields a continuous curve, above which it can be shownthat �nm��m, and below which it can be shown that �nm�m. An approximate expression describing this curve, onethat agrees reasonably well with numerical calculations for���min, is ��nm=�m
��� ln�1 /�r� / �kL�Lvia /L−�r��− �1−�r��.The region above this curve that also lies between the
lower and upper mutational thresholds of the nonmutatorscorresponds to a parameter regime where there is a stablequasispecies with a nonzero fraction of nonmutators. Theregion below this curve that also lies between the lower andupper mutational thresholds of the mutators corresponds to aparameter regime where there is a stable quasispecies con-sisting entirely of mutators.
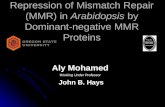
We developed a stochastic code to simulate the dynamicsof a population of self-replicating genomes of the form �=�via�rep. At each time step, a given genome replicates withprobability �� t, where �� is the growth constant and t isthe size of the time step. We choose t to be sufficientlysmall so that the replication probability is much smaller than1. Since we only allow a genome to replicate itself at mostonce during an iteration, making the replication probabilitysmall ensures that this restriction is a good approximation ofthe dynamics. After every time interval �, a shift occurs anda new master sequence is generated to be one point mutationaway from the old one. The mutation is generated at a dif-ferent random location in the viable region to avoid popula-tion accumulation �to meet the initial conditions of the ana-lytical model�, i.e., the mutation position repeats itself everyLvia peak shifts. Each realization simulated at least 104 timesteps to make sure a periodic solution was reached. Weshould note that, in contrast to the analytical model, the sto-chastic simulations do not make any additional assumptions
FIG. 2. �Color online� A single trajectory from a stochasticsimulation for N=1.5�105, Lvia=20, Lrep=10, S=4, �=0.02, �r
=0.1, and �=2. The top graph shows the mean fitness of the popu-lation as a function of time, while the bottom graph shows thefraction of viable organisms that are mutators. Note that the meanfitness reaches its static landscape value. The simulated fraction ofmutators at the beginning and at the end of each cycle shows goodagreement with the analytical results.
FIG. 1. �Color online� Solution of �nm=1 and �m=1 as a func-tion of cycle length � for Lvia=20, Lrep=10, S=4, �r=0.1. The areaconfined by the red diamonds is the survivability region of themutators, while the area confined by the blue asterisks is the sur-vivability region of the nonmutators. In the region above the solidcurve the fraction of nonmutators is nonzero, while below the solidcurve only mutators exist. �min is computed from the analyticalformula given in the text.
BRIEF REPORTS PHYSICAL REVIEW E 77, 042901 �2008�
042901-3

beyond the ones detailed here. In particular, backmutationsare allowed.
As can be seen from Figs. 2 and 3, as long as � is suffi-ciently small, we obtain good agreement between theory andsimulation, which seems to justify the various approxima-tions made in our analytical model. However, due to stochas-
tic effects, the fraction of mutators requires a larger popula-tion size than other evolution parameters �e.g., mean fitness,mean Hamming distance� before reasonable agreement withthe theoretical results is obtained.
For sufficiently large �, the agreement between our point-mutation model and the simulation results breaks down. Thereason for this is that, when � is small, the n00→n01, n00
→n10, and n01→n11 transition probabilities are all first orderin �, while the transition probability n00→n11 is second orderin �, and is therefore neglected in a model that considers onlymutation probabilities that are up to first order in �.
For larger �, the nonmutator to mutator transition prob-ability, which is 1− �1−�r��Lrep, goes from being first order in� to zeroth order, so that the n00→n11 transition becomesfirst order in � as well. Therefore, if we wish to use a first-order model for larger �, then this additional transition prob-ability must be included. Including the n00→n11 transitionfor larger � significantly improves the theoretical predictionof the mutator fraction. For future research, we wish to de-velop a more systematic approach for estimating the mutatorfraction in a dynamic fitness landscape that does not requirethe assumption of small �. Furthermore, we would like tomove beyond mean-field descriptions of the evolutionary dy-namics and develop analytical approaches for quantifyingvarious stochastic effects.
This research was supported by the Israel Science Foun-dation and by the United States–Israel Binational ScienceFoundation.
�1� D. Voet and J. G. Voet, Biochemistry, 3rd ed. �Wiley, NewYork, 2004�.
�2� E. Tannenbaum, E. J. Deeds, and E. I. Shakhnovich, Phys.Rev. Lett. 91, 138105 �2003�.
�3� J. LeClerc, B. Li, W. Payne, and T. Cebula, Science 274, 1208�1996�.
�4� E. Tannenbaum and E. I. Shakhnovich, Phys. Rev. E 69,011902 �2004�.
�5� A. Sasaki and M. A. Nowak, J. Theor. Biol. 224, 241 �2003�.
�6� D. A. Kessler and H. Levine, Phys. Rev. Lett. 80, 2012 �1998�.�7� J. M. J. Travis and E. R. Travis, Proc. R. Soc. London, Ser. B
269, 591 �2002�.�8� P. R. Painter, Genetics 79, 649 �1975�.�9� P. D. Sniegowski, P. J. Gerrish, and R. E. Lenski, Nature �Lon-
don� 387, 703 �1997�.�10� M. E. Palmer and M. Lipsitch, Genetics 173, 461 �2006�.�11� M. Nilsson and N. Snoad, Phys. Rev. Lett. 84, 191 �2000�.
FIG. 3. �Color online� Fraction of mutators right after a peakshift for the long-time periodic solution of the quasispecies dynam-ics as a function of �. N=1.5�105, Lvia=20, Lrep=10, S=4, �=0.02, and �r=0.1. The results are averaged over ten independentruns.
BRIEF REPORTS PHYSICAL REVIEW E 77, 042901 �2008�
042901-4