Euclidean & Non-Euclidean Geometries. Development and History
Upload
juri-ranieriCategory
view
525download
0

Euclidean Distance Matrices:A Short Walk Through Theory, Algorithms and Applications
Ivan Dokmanic, Reza Parhizkar, Juri Ranieri, Miranda Krekovic and Martin Vetterli

“There are three things that matter in property: location, location, location.”
— Lord Harold Samuel, a real estate tycoon in Britain
1

The 2014 Nobel Prize in Physiology or Medicine: for their discoveries of cells thatconstitute a positioning system in the brain.
John O’Keefe,May-Britt Moser and Edvard I. Moser
2

Bat, echoes and navigation
72
70
68
66
74
Freq
uenc
y [k
Hz] 64
72
70
68
66
74
64
Hiryu, Shizuko, et al. "On-board telemetry of emitted sounds from free-flying bats: compensation for velocity and distance stabilizes echo frequency and amplitude." Journal of Comparative Physiology A 194.9 (2008): 841-851.
3

Daniel Kish, a human echo-locator
4

“You took my sonar concept and applied it to every phone in the city. With half the cityfeeding you sonar, you can image all of Gotham. This is *wrong*.”
— Lucius Fox, The Dark Knight
5

Motivation
I We land at the GVA airport and we have lost our map of Switzerland...
I We have only the train schedule!
Lausanne Geneva Zurich Neuchatel Bern
Lausanne 0 33 128 40 66
Geneva 33 0 158 64 101
Zurich 128 158 0 88 56
Neuchatel 40 64 88 0 34
Bern 66 101 56 34 0
Distances in minutes between five Swiss cities
SwitzerlandSwitzerland
Geneva
Lausanne
NeuchatelBern
Zurich
Locations (red) and estimated locations (black) ofthe cities.
6

Motivation
I We land at the GVA airport and we have lost our map of Switzerland...
I We have only the train schedule!
Lausanne Geneva Zurich Neuchatel Bern
Lausanne 0 33 128 40 66
Geneva 33 0 158 64 101
Zurich 128 158 0 88 56
Neuchatel 40 64 88 0 34
Bern 66 101 56 34 0
Distances in minutes between five Swiss cities
SwitzerlandSwitzerland
Geneva
Lausanne
NeuchatelBern
Zurich
Locations (red) and estimated locations (black) ofthe cities.
6

Sensor network localization problem
Sensor network deployed on a rock glacier
(SensorScope project)
I We measure the distances between the sensor nodes,
I The distances are noisy and some are missing,
I How do we reconstruct the locations of the sensors?
7

Molecular conformation problem
Density map and structure of a
molecule [10.7554/elife.01345]
I We measure the distances between the atoms,
I The distances are given as intervals, and some are missing,
I How do we reconstruct the molecule?
8

Echo SLAM
A
B
C
A) An unknown room, B) a
moving robot, C) a room impulse
response measured by the robot
I A robot moves autonomously in the room,
I At every step it measures the room impulse response,
I How do we simultaneously recover the room shape and therobot location?
9

Overview:
I Motivation
I Euclidean Distance Matrices (EDM) and their properties
I Applications of EDMs
I Algorithms for EDMs
I Conclusions and open problems
10

Euclidean Distance Matrix
I Consider a set of n points in d dimensions: X ∈ Rd×n,
I edm(X) contains the squared distances between the points, edm(X)ij = ‖xi − xj‖2,
I Equivalently, edm(X) is a linear function of the Gramian G = X>X.
I Rank of the Gramian G is d .
11

Rank testing of Euclidean distance matrix (EDM)
I What can we say about ‖xi − xj‖2when x ∈ Rd?
12

Rank testing of Euclidean distance matrix (EDM)
I What can we say about ‖xi − xj‖2when x ∈ Rd?
‖xi − xj‖2 = 〈x i − x j , x i − x j〉
= 〈x i , x i 〉+ 〈x j , x j〉 − 2 〈x i , x j〉
gijdef= 〈x i , x j〉 , G
def= (gij)
edm(X) = −2G + 1diag(G )T + diag(G )1T
⇒ rank(edm(X)) ≤ rank(G ) + 1 + 1
= d + 2
12

Rank testing of Euclidean distance matrix (EDM)
I What can we say about ‖xi − xj‖2when x ∈ Rd?
‖xi − xj‖2 = 〈x i − x j , x i − x j〉
= 〈x i , x i 〉︸ ︷︷ ︸gii
+ 〈x j , x j〉︸ ︷︷ ︸gjj
−2 〈x i , x j〉︸ ︷︷ ︸gij
gijdef= 〈x i , x j〉 , G
def= (gij)
edm(X) = −2G + 1diag(G )T + diag(G )1T
⇒ rank(edm(X)) ≤ rank(G ) + 1 + 1
= d + 2
12

Rank testing of Euclidean distance matrix (EDM)
I What can we say about ‖xi − xj‖2when x ∈ Rd?
‖xi − xj‖2 = 〈x i − x j , x i − x j〉
= 〈x i , x i 〉︸ ︷︷ ︸gii
+ 〈x j , x j〉︸ ︷︷ ︸gjj
−2 〈x i , x j〉︸ ︷︷ ︸gij
gijdef= 〈x i , x j〉 , G
def= (gij)
edm(X) = −2G + 1diag(G )T + diag(G )1T
⇒ rank(edm(X)) ≤ rank(G ) + 1 + 1
= d + 2
12

Rank testing of Euclidean distance matrix (EDM)
I What can we say about ‖xi − xj‖2when x ∈ Rd?
‖xi − xj‖2 = 〈x i − x j , x i − x j〉
= 〈x i , x i 〉︸ ︷︷ ︸gii
+ 〈x j , x j〉︸ ︷︷ ︸gjj
−2 〈x i , x j〉︸ ︷︷ ︸gij
gijdef= 〈x i , x j〉 , G
def= (gij)
edm(X) = −2G + 1diag(G )T + diag(G )1T
⇒ rank(edm(X)) ≤ rank(G ) + 1 + 1
= d + 2
12

EDM properties: rank
I The rank of an EDM depends only on the embedding dimension of the points:
Theorem (Rank of EDMs)
Rank of an EDM corresponding to points in Rd is at most d + 2.
13

EDM properties: essential uniqueness
I EDMs are invariant to rigid transformations (translation, rotations, reflections):
edm(X) = edm(RX + b1>).
14

Counting the degrees of freedom
I Consider n points in Rd , then we have #X = nd degrees of freedom (DoF).
I If we describe the points with a symmetric rank-(d + 2) matrix, we have
#DOF = n(d + 1)− (d+1)(d+2)2 DoF.
I #DOF#X∼ d+1
d : the rank property is not a tight description of an EDM.
n101 102 103 104 105
DoF
101
102
103
104
105d=3
n101 102 103 104 105
DoF
101
102
103
104
105d=1
n101 102 103 104 105
DoF
101
102
103
104
105d=10
15

Counting the degrees of freedom
I Consider n points in Rd , then we have #X = nd degrees of freedom (DoF).
I If we describe the points with a symmetric rank-(d + 2) matrix, we have
#DOF = n(d + 1)− (d+1)(d+2)2 DoF.
I #DOF#X∼ d+1
d : the rank property is not a tight description of an EDM.
n101 102 103 104 105
DoF
101
102
103
104
105d=3
n101 102 103 104 105
DoF
101
102
103
104
105d=1
n101 102 103 104 105
DoF
101
102
103
104
105d=10
15

Forward and inverse problem related to EDMs
Forward problem
Inverse problem
I Forward problem: given the points X, find the EDM edm(X).
I Inverse problem: given the distances ‖xi − xj‖2, find the points X.
• Distances may be noisy,
• Some distances may be missing,
• We may loose the naming of the distances.
• Significantly harder than the forward problem!
16

Forward and inverse problem related to EDMs
Forward problem
Inverse problem
I Forward problem: given the points X, find the EDM edm(X).
I Inverse problem: given the distances ‖xi − xj‖2, find the points X.
• Distances may be noisy,
• Some distances may be missing,
• We may loose the naming of the distances.
• Significantly harder than the forward problem!
16

Forward and inverse problem related to EDMs
Forward problem
Inverse problem
I Forward problem: given the points X, find the EDM edm(X).
I Inverse problem: given the distances ‖xi − xj‖2, find the points X.
• Distances may be noisy,
• Some distances may be missing,
• We may loose the naming of the distances.
• Significantly harder than the forward problem!
16

Forward and inverse problem related to EDMs
Forward problem
Inverse problem?
?
?
?
I Forward problem: given the points X, find the EDM edm(X).
I Inverse problem: given the distances ‖xi − xj‖2, find the points X.
• Distances may be noisy,
• Some distances may be missing,
• We may loose the naming of the distances.
• Significantly harder than the forward problem!
16

Forward and inverse problem related to EDMs
Forward problem
Inverse problem
I Forward problem: given the points X, find the EDM edm(X).
I Inverse problem: given the distances ‖xi − xj‖2, find the points X.
• Distances may be noisy,
• Some distances may be missing,
• We may loose the naming of the distances.
• Significantly harder than the forward problem!
16

Forward and inverse problem related to EDMs
Forward problem
Inverse problem
I Forward problem: given the points X, find the EDM edm(X).
I Inverse problem: given the distances ‖xi − xj‖2, find the points X.
• Distances may be noisy,
• Some distances may be missing,
• We may loose the naming of the distances.
• Significantly harder than the forward problem!
16

Every application has different challenges
?
?
I Problem: reconstruct the network topology.
I Nodes measure distances from each other.
I Random missing entries (e.g. distance).
I Measured entries are noisy.
17

Every application has different challenges
I Problem: reconstruct the molecular shape.
I We measure the distance between atoms.
I Distances are given as intervals.
18

Sometimes we measure distances without names
CorrectWrongI We measure a set of distances, we lost their
labels: combinatorial problem.
I Correct labels generate a low-rank matrix.
I Wrong labels generate a full-rank matrix.
I Hard to solve.
I Harder when the distances are noisy.
19

Overview:
I Motivation
I Euclidean Distance Matrices (EDM) and their properties
I Applications of EDMs
I Algorithms for EDMs
I Conclusions and open problems
20

Applications: Can you hear the shape of a room?
AI One cannot hear the shape of a drum....
but can one hear the shape of a room?(Using a source and 5+ microphones)
I Each microphone records the roomimpulse response (B), the peaks beingthe reflections on the wall.
I Using the image source model, wetransform walls to points.
I Problem 1: unlabeled distance problem
I Problem 2: some peaks do notcorrespond to any reflection, somereflections may be missing.
21

Applications: Can you hear the shape of a room?
A
B
I One cannot hear the shape of a drum....but can one hear the shape of a room?(Using a source and 5+ microphones)
I Each microphone records the roomimpulse response (B), the peaks beingthe reflections on the wall.
I Using the image source model, wetransform walls to points.
I Problem 1: unlabeled distance problem
I Problem 2: some peaks do notcorrespond to any reflection, somereflections may be missing.
21

Applications: Can you hear the shape of a room?
A
B
I One cannot hear the shape of a drum....but can one hear the shape of a room?(Using a source and 5+ microphones)
I Each microphone records the roomimpulse response (B), the peaks beingthe reflections on the wall.
I Using the image source model, wetransform walls to points.
I Problem 1: unlabeled distance problem
I Problem 2: some peaks do notcorrespond to any reflection, somereflections may be missing.
21

Applications: Can you hear the shape of a room?
A
B
I One cannot hear the shape of a drum....but can one hear the shape of a room?(Using a source and 5+ microphones)
I Each microphone records the roomimpulse response (B), the peaks beingthe reflections on the wall.
I Using the image source model, wetransform walls to points.
I Problem 1: unlabeled distance problem
I Problem 2: some peaks do notcorrespond to any reflection, somereflections may be missing.
21

Echo sorting algorithm
1 2 3 4 5
I We know the geometry of the microphone array,that is a quadrant of the EDM.
I For each microphone, we have a set of possibledistances w.r.t. the image sources,
I Location of the image sources: combinatorial search
I Rank-based EDM completion is stable to noise andcomputationally feasible.
22

Echo sorting algorithm
1
2
3
4
5
1 2 3 4 5
I We know the geometry of the microphone array,that is a quadrant of the EDM.
I For each microphone, we have a set of possibledistances w.r.t. the image sources,
I Location of the image sources: combinatorial search
I Rank-based EDM completion is stable to noise andcomputationally feasible.
22

Echo sorting algorithm
1
2
3
4
5
??
??
?? ? ??
?1 2 3 4 5
I We know the geometry of the microphone array,that is a quadrant of the EDM.
I For each microphone, we have a set of possibledistances w.r.t. the image sources,
I Location of the image sources: combinatorial search
I Rank-based EDM completion is stable to noise andcomputationally feasible.
22

Echo sorting algorithm
1
2
3
4
5
??
??
?? ? ??
?1 2 3 4 5
I We know the geometry of the microphone array,that is a quadrant of the EDM.
I For each microphone, we have a set of possibledistances w.r.t. the image sources,
I Location of the image sources: combinatorial search
I Rank-based EDM completion is stable to noise andcomputationally feasible.
22

It works... at EPFL
1
23
4
5
0.99
2.08
89.9°90.0°
63.2°62.0°
116.8°118.0°
90.190.0°
7.01m7.08m
B
12
3
4 5
2.520.4
100.9° 100.5°
90.3°90.0°
79.1°79.5°
89.7°90.0°
C
° Height
Exp. B 2.70mExp. C 2.71mReal 2.69m
4.55m4.59m
A
23

It works... at the Lausanne cathedral!
D
EFD
DDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDD
EEEEEEEEEEEEEEEE DDDDDDDDDDDDDDDDDDDDDDDDDD
E
D
12 3
1
2 3
6.48m6.53m
6.71m6.76m
L
24

Applications: Sparse Phase Retrieval
Forward problem
Inverse problem
I (A) We measure a sparse auto-correlation function a(x).
I The ACF is supported on the distances between the elements of the original signal.
I The distances are unlabeled and noisy.
I (B) We recover the support of f (x) by labeling the distances.
I Knowing the support, it is easy to recover the amplitudes.25

Algorithm for Sparse Phase Retrieval
Forward problem
Inverse problem
I Distance measurements are shift invariant, we set the first element at the origin.
I The support of the signal is a subset of the support of the autocorrelation function.
I Greedy algorithm selects the best element from the support of the measured ACF
I Cost function: distance between the support of the ACF of the partial solution and thesupport of the measured ACF
26

Algorithm for Sparse Phase Retrieval
Forward problem
Inverse problem
I Distance measurements are shift invariant, we set the first element at the origin.
I The support of the signal is a subset of the support of the autocorrelation function.
I Greedy algorithm selects the best element from the support of the measured ACF
I Cost function: distance between the support of the ACF of the partial solution and thesupport of the measured ACF
26

Algorithm for Sparse Phase Retrieval
Forward problem
Inverse problem
I Distance measurements are shift invariant, we set the first element at the origin.
I The support of the signal is a subset of the support of the autocorrelation function.
I Greedy algorithm selects the best element from the support of the measured ACF
I Cost function: distance between the support of the ACF of the partial solution and thesupport of the measured ACF
26

Algorithm for Sparse Phase Retrieval
Forward problem
Inverse problem
I Distance measurements are shift invariant, we set the first element at the origin.
I The support of the signal is a subset of the support of the autocorrelation function.
I Greedy algorithm selects the best element from the support of the measured ACF
I Cost function: distance between the support of the ACF of the partial solution and thesupport of the measured ACF
26

Algorithm for Sparse Phase Retrieval
SNR of the ACF
Num
ber o
f del
tas
Phase transition: Noise vs Complexity
−10 −9 −8 −7 −6 −5 −4 −3
4
6
8
10
12
14
16
18
20
22
24 0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
I Sparse Phase Retrieval using the structure of the EDMs,
I The obtained algorithm is stable to noise.
27

Echo SLAM
A
B
C
I We would like to localize a robot (B) insidean unknown room (A)
I The robot walks autonomously; we knowsome statistics of the steps.
I After each step, the robot emits a sound andmeasures the room impulse response (C).
I Each peak in the RIR likely corresponds toan image source.
I Problem: joint reconstruction of roomgeometry and robot location
28

Echo SLAM
A
B
C
I We would like to localize a robot (B) insidean unknown room (A)
I The robot walks autonomously; we knowsome statistics of the steps.
I After each step, the robot emits a sound andmeasures the room impulse response (C).
I Each peak in the RIR likely corresponds toan image source.
I Problem: joint reconstruction of roomgeometry and robot location
28

Echo SLAM
A
B
C
I We would like to localize a robot (B) insidean unknown room (A)
I The robot walks autonomously; we knowsome statistics of the steps.
I After each step, the robot emits a sound andmeasures the room impulse response (C).
I Each peak in the RIR likely corresponds toan image source.
I Problem: joint reconstruction of roomgeometry and robot location
28

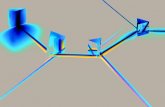
Echo SLAM with fixed sound source
Estimated ISImage source Measured distance
Robot trajectoryRobot locationRoom
1st step of the robot
I At each step, we measure the RIR anddetermine the distance from the imagesources.
I At the 1st step, initialization of theprobability distribution of the image source
I At every step, the robot movesautonomously and we update the probabilitydistributions.
I The precision of the estimated image sourcesimproves with the steps.
I The estimated image sources are then usedto estimate the room shape.
29

Echo SLAM with fixed sound source
Estimated ISImage source Measured distance
Robot trajectoryRobot locationRoom
2nd step of the robot
I At each step, we measure the RIR anddetermine the distance from the imagesources.
I At the 1st step, initialization of theprobability distribution of the image source
I At every step, the robot movesautonomously and we update the probabilitydistributions.
I The precision of the estimated image sourcesimproves with the steps.
I The estimated image sources are then usedto estimate the room shape.
29

Echo SLAM with fixed sound source
Estimated ISImage source Measured distance
Robot trajectoryRobot locationRoom
3rd step of the robot
I At each step, we measure the RIR anddetermine the distance from the imagesources.
I At the 1st step, initialization of theprobability distribution of the image source
I At every step, the robot movesautonomously and we update the probabilitydistributions.
I The precision of the estimated image sourcesimproves with the steps.
I The estimated image sources are then usedto estimate the room shape.
29

Echo SLAM with fixed sound source
Estimated ISImage source Measured distance
Robot trajectoryRobot locationRoom
4th step of the robot
I At each step, we measure the RIR anddetermine the distance from the imagesources.
I At the 1st step, initialization of theprobability distribution of the image source
I At every step, the robot movesautonomously and we update the probabilitydistributions.
I The precision of the estimated image sourcesimproves with the steps.
I The estimated image sources are then usedto estimate the room shape.
29

Echo SLAM with fixed sound source
Estimated ISImage source Measured distance
Robot trajectoryRobot locationRoom
5th step of the robot
I At each step, we measure the RIR anddetermine the distance from the imagesources.
I At the 1st step, initialization of theprobability distribution of the image source
I At every step, the robot movesautonomously and we update the probabilitydistributions.
I The precision of the estimated image sourcesimproves with the steps.
I The estimated image sources are then usedto estimate the room shape.
29

Echo SLAM with fixed sound source
Estimated ISImage source Measured distance
Robot trajectoryRobot locationRoom
9th step of the robot
I At each step, we measure the RIR anddetermine the distance from the imagesources.
I At the 1st step, initialization of theprobability distribution of the image source
I At every step, the robot movesautonomously and we update the probabilitydistributions.
I The precision of the estimated image sourcesimproves with the steps.
I The estimated image sources are then usedto estimate the room shape.
29

Echo SLAM with fixed sound source
Estimated ISImage source Measured distance
Robot trajectoryRobot locationRoom
Estimated room
10th step of the robot
I At each step, we measure the RIR anddetermine the distance from the imagesources.
I At the 1st step, initialization of theprobability distribution of the image source
I At every step, the robot movesautonomously and we update the probabilitydistributions.
I The precision of the estimated image sourcesimproves with the steps.
I The estimated image sources are then usedto estimate the room shape.
29

Applications: Multidimensional unfolding of echoes
Microphones Acoustic events
1
32
4 1
2
3
??
??
??
??
??
????
??
??
I Multidimensional unfolding:
• Divide the points in two sets,
• Measure the distances between the points belonging to different subsets,
• Other distances are unknown.
I Example: calibration of microphones with sources at unknown locations.
I Many distances are missing, the measured ones are noisy.30

Applications: Multidimensional unfolding of echoes
MORE DETAILS, REFERENCES
31

Applications: Calibration in ultrasound tomography
A B
I Ultrasound transceivers deployed on a circle (A), their location is unknown.
I Each transceiver can measure the distance w.r.t. the transceivers in front.
I We can fill the EDM, with structured missing entries (B).
I Problem: estimate the locations of the transceiver to improve the imaging performance.
32

Applications: Calibration in ultrasound tomography
−0.1
0
0.1
1200
1500
1800
0 1.01.0−
−0.1
0
0.1
1490
1500
1510
0 1.01.0−
Uncalibrated device Calibrated device
I Solution of the ultrasound tomography when measuring water (1500 m/s).
I Calibration improves significantly the tomographic imaging.
33

Overview:
I Motivation
I Euclidean Distance Matrices (EDM) and their properties
I Applications of EDMs
I Algorithms for EDMs
I Conclusions and open problems
34

Algebraic algorithm: Multidimensional scaling (MDS)
Classical Multidimensional scaling (MDS)
I Choose x1 = 0, then the first column of D,call it d1, is diag(X>X )
I Thus we can construct the Gram matrix asG = −1
2(D − 1d>1 − d11>)
I The point set is obtained from G = X>X
35

Iterative optimization: s-stress function
Alternating descent on the s-stress function
I Minimize the s-stress,∑(i ,j)∈E
(‖x i − x j‖2 − dij)2
I Alternate between minimizing individualcoordinate component of each point x i
True location Estimated location
Round 1
36

Iterative optimization: s-stress function
Alternating descent on the s-stress function
I Minimize the s-stress,∑(i ,j)∈E
(‖x i − x j‖2 − dij)2
I Alternate between minimizing individualcoordinate component of each point x i
True location Estimated location
Round 1
36

Iterative optimization: s-stress function
Alternating descent on the s-stress function
I Minimize the s-stress,∑(i ,j)∈E
(‖x i − x j‖2 − dij)2
I Alternate between minimizing individualcoordinate component of each point x i
True location Estimated location
36

Iterative optimization: s-stress function
Alternating descent on the s-stress function
I Minimize the s-stress,∑(i ,j)∈E
(‖x i − x j‖2 − dij)2
I Alternate between minimizing individualcoordinate component of each point x i
True location Estimated location
Round 1
36

Iterative optimization: s-stress function
Alternating descent on the s-stress function
I Minimize the s-stress,∑(i ,j)∈E
(‖x i − x j‖2 − dij)2
I Alternate between minimizing individualcoordinate component of each point x i
True location Estimated location
Round 1
36

Iterative optimization: s-stress function
Alternating descent on the s-stress function
I Minimize the s-stress,∑(i ,j)∈E
(‖x i − x j‖2 − dij)2
I Alternate between minimizing individualcoordinate component of each point x i
True location Estimated location
Round 1
36

Iterative optimization: s-stress function
Alternating descent on the s-stress function
I Minimize the s-stress,∑(i ,j)∈E
(‖x i − x j‖2 − dij)2
I Alternate between minimizing individualcoordinate component of each point x i
True location Estimated location
Round 1
36

Iterative optimization: s-stress function
Alternating descent on the s-stress function
I Minimize the s-stress,∑(i ,j)∈E
(‖x i − x j‖2 − dij)2
I Alternate between minimizing individualcoordinate component of each point x i
True location Estimated location
Round 1
36

Iterative optimization: s-stress function
Alternating descent on the s-stress function
I Minimize the s-stress,∑(i ,j)∈E
(‖x i − x j‖2 − dij)2
I Alternate between minimizing individualcoordinate component of each point x i
True location Estimated location
Round 1
36

Iterative optimization: s-stress function
Alternating descent on the s-stress function
I Minimize the s-stress,∑(i ,j)∈E
(‖x i − x j‖2 − dij)2
I Alternate between minimizing individualcoordinate component of each point x i
True location Estimated location
Round 1
36

Iterative optimization: s-stress function
Alternating descent on the s-stress function
I Minimize the s-stress,∑(i ,j)∈E
(‖x i − x j‖2 − dij)2
I Alternate between minimizing individualcoordinate component of each point x i
True location Estimated location
Round 1
36

Iterative optimization: s-stress function
Alternating descent on the s-stress function
I Minimize the s-stress,∑(i ,j)∈E
(‖x i − x j‖2 − dij)2
I Alternate between minimizing individualcoordinate component of each point x i
True location Estimated location
Round 2
36

Iterative optimization: s-stress function
Alternating descent on the s-stress function
I Minimize the s-stress,∑(i ,j)∈E
(‖x i − x j‖2 − dij)2
I Alternate between minimizing individualcoordinate component of each point x i
True location Estimated location
Round 3
36

Iterative optimization: s-stress function
Alternating descent on the s-stress function
I Minimize the s-stress,∑(i ,j)∈E
(‖x i − x j‖2 − dij)2
I Alternate between minimizing individualcoordinate component of each point x i
True location Estimated location
Round N
36

Exploiting the EDM cone: Semidefinite relaxations
Semidefinite relaxation
I The Gram matrix is positive semidefinite
minimizeG
∥∥∥W ◦ (D − edm(G ))∥∥∥2
F
subject to (((((((hhhhhhhrank(G ) ≤ d and G ∈ Sn+ ∩ Snc .d12d13
23
The EDM cone for 3 points
37

Algorithms comparison
Algorithm Pros Cons
Classical MDS Very simple No missing distancesHandles noise Unnatural cost function
Alternating Descent Simpleon s-stress Good cost function (s-stress) Convergence issues
Missing distances, noise
SDR Good cost function SlowMissing distances, noise Can’t enforce the embeddingHandles constraints on distances dimension
38

Algorithms: performance w.r.t. missing entries
20 40 60 80 100 120 1400
20
40
60
80
100
Succ
ess
perc
enta
ge
Number of deletions
Alternating Descent
Rank Alternation
Semidefinite Relaxation
Rank Alternation
50 100 1500
0.2
0.4
0.6
0.8
1Semidefinite Relaxation
50 100 150Number of deletions
Rel
ativ
e er
ror
Alternating Descent
Jitter
50 100 150
39

Algorithms: performance w.r.t. number of acoustic events
5 10 15 20 25 30
20
40
60
80
100
Succ
ess
perc
enta
ge
Number of acoustic events
Semidefinite Relaxation
Rank Alternation
Alternating Descent
Alternating Descent
5 10 15 20 25 300
0.2
0.4
0.6Rank Alternation
5 10 15 20 25 30
Semidefinite Relaxation
Number of acoustic events
Rel
ativ
e er
ror
Algorithm 4
Jitter
5 10 15 20 25 30
40

The choice of algorithm is fundamental
41

Overview:
I Motivation
I Euclidean Distance Matrices (EDM) and their properties
I Applications of EDMs
I Algorithms for EDMs
I Conclusions and open problems
42

Open problems
I Distance matrices on manifolds I Projections of EDMs on subspaces
I Efficient algorithms for distancelabeling
I Analytical local minimum of s-stress
−5
0
5
−5
0
5
0
500
1000
1500
2000
0
200
400
600
800
1000
1200
1400
1600
1800
2000
global min.
local max.saddle
43

Conclusions
Application missing distances noisy distances unlabeled distances
Wireless sensor networks * 4 4 ×Molecular conformation 4 4 ×
Hearing the shape of a room * × 4 4
Indoor localization × 4 4
Calibration * 4 4 ×Sparse phase retrieval * × 4 4
* Applications that we have discussed in this talk.
44

Literature
I I.Dokmanic, R.Parhizkar, J.Ranieri, and M.Vetterli, Euclidean Distance Matrices: A ShortWalk Through Theory, Algorithms and Applications, to appear in IEEE Signal ProcessingMagazine, 2015.
I R.Parhizkar, A.Karbasi, S.Oh, M.Vetterli, Calibration Using Matrix Completion withApplication to Ultrasound Tomography, IEEE Transaction on Signal Processing, 2013.
I I.Dokmanic, R.Parhizkar, A.Walther, Y.M.Lu, and M.Vetterli, Acoustic echoes revealroom shape, Proceedings of the National Academy of Sciences, 2013.
I J.Ranieri, A.Chebira, Y.M.Lu, and M.Vetterli, Phase Retrieval for Sparse Signals:Uniqueness Conditions and Algorithms in preparation.
I R.Parhizkar, Euclidean Distance Matrices: Properties, Algorithms and Applications, PhDThesis EPFL, 2013.
I I.Dokmanic, Listening to Distances and Hearing Shapes: Inverse Problems in RoomAcoustics and Beyond, PhD Thesis EPFL, 2015.
45

Acknowledgments
I Farid Movahedi Naini for helping with the numerical experiments.
I Funding resources:
• Swiss National Science Foundation, Grant 200021 138081.
• European Research Council SPARSAM, Grant 247006.
• Google Focused Research Award.
• Google PhD fellowship.
46

Thank you for your attention!
Googlecar
Batmobile with echolocation
47