
Classification of Engineering Materials, Engineering requirements of materials.

<subnote>
Essentials of Materials Science
and Engineering
Donald R. Askeland
Pradeep P. Fulay
Writer : TransparentTape
www.transparenttape.tistory.com

1. Introduction to Materials Science and Engineering
A. What is Materials Science and Engineering?
i. Interdisciplinary field concerned with inventing new materials and improving previously known
materials
ii. Composition : the chemical make-up of a material
iii. Structure : description of the arrangement of atoms
iv. Synthesis : how materials are made from naturally occurring or man-made chemicals
v. Processing : how materials are shaped into useful compositions
B. Classification of Materials
i. Stress : load or force per unit area
ii. Strain : elongation or change in dimension divided by original dimension
iii. Application of stress causes strain
iv. Elastic : If the strain goes away after the load or applied stress is removed, the strain is said to
be elastic
v. Plastic : If the strain remains after the stress is removed, the strain is said to be plastic
vi. Metals and Alloys
1. Steels, aluminum, magnesium, zinc, cast iron, titanium, copper, nickel
2. Good electrical and thermal conductivity
3. Relatively high strength, high stiffness, ductility or formability, and shock resistance
4. Alloys
A. Combinations of metals
B. Provide improvement in a desirable property
vii. Ceramics
1. Defined as inorganic crystalline materials
2. Probably the most natural materials
3. Strong and hard, but also very brittle
viii. Glasses and glass-Ceramics
1. Glass : amorphous material, often, but not always, derived from molten silica
ix. Polymers
1. Typically organic materials
2. Mostly, good electrical resistivity and thermal insulation
3. Lower strength, but good strength-to-weight ratio
4. Typically not suitable for use at high temperatures
5. Many, have good resistance to corrosive chemicals
6. Thermoplastic
A. Long molecular chains are not rigidly connected
B. Good ductility and formability
C. Made by their molten form
7. Thermosetting
A. Strong but more brittle
B. Typically cast into molds
x. Semiconductors
xi. Composite materials

C. Functional classification of materials
D. Classification of materials based on structure
E. Environmental and other effects
i. Temperature
ii. Corrosion
iii. Fatigue
iv. Strain rate
F. Materials design and selection

2. Atomic structure
A. The structure of materials : Technological Relevance
B. The structure of the atom
i. Atom = nucleus + electrons
ii. Nucleus = neutrons + protons
iii. Electrical charge q = 1.60 × 10−19 coulomb
iv. Atomic number : equal to the number of electrons or protons
v. Atomic mass M( g/mol ) : equal to the average number of protons and neutrons in the atom
vi. Avogadro number ( NA = 6.02 × 1023 atoms/mol ) : the number of atoms or molecules in a
mole
C. The electronic structure of the atom
i. Electronegativity
1. The tendency of an atom to gain electron
2. Typically, higher as row is increased in the periodic table
3. Typically, lower as column is increased in the periodic table
D. The periodic table
E. Atomic bonding
i. Metallic bond
1. Most pure metals are good electrical conductors of electricity at low temperatures(~ 300K)
2. Relatively high Young’s modulus since bonds are strong
3. Good ductility since bonds are not directional
4. Relatively high melting points
5. Owing to their electropositive character, many tend to undergo corrosion or oxidation
6. Good conductors of heat
ii. Covalent bond
1. Formed by sharing of valence electrons
2. Bonds are very strong so hard
3. Very high melting points, useful for high-temperatures
4. Limited ductility since bonds are directional
5. Many of them do not have high electrical conductivity
iii. Ionic bond
1. Formed by donating or receiving valence electrons
2. Cation : the atom that exhibits a net positive charge
3. Anion : the atom that exhibits a net negative charge
iv. Van der waals bonding
1. Weak bonds
2. Bonds due to electrical dipole
v. Mixed bonding
1. Metals
A. Two or more metals may be bonded by a mixture of metallic and ionic bonds
2. Ceramic and semiconducting compounds
A. Combinations of metallic and nonmetallic elements

B. Bonded by a mixture of covalent and ionic bonds
C. Fraction can be estimated
i. Fraction covalent = exp (−0.25∆E2)
ii. ∆E : the difference in electronegativites
F. Binding energy and interatomic spacing
i. Resulted from a balance between repulsive and attractive forces
ii. Interatomic spacing = 2r, in a solid metal
iii. Binding energy
1. The energy required to create or break the bond
2. High binding energy → high strength and melting temperature
3. Ionic bonded materials have a large binding energy
4. Metals have lower binding energies ( considering ∆E )
iv. Modulus of elasticity
1. The slope of the stress-strain curve in the elastic region, also known as Young’s modulus
2. Higher binding energy → higher modulus of elasticity
3. Does not depend strongly on the microstructure
4. Depends primarily on the atoms that make up the material

v. Coefficient of thermal expansion(CTE)
1. α = 1
L ×
dL
dT [C−1]
2. How much a material expands or contracts when its temperature is changed
3. Related to the strength of the atomic bonds
4. Higher IAE → lower CTE

3. Atomic and ionic arrangements
A. Short-range versus long-range order
i. No order
ii. Short-range order(SRO)
1. Extended only to the atom’s nearest neighbors
iii. Long-range order(LRO)
1. Extended over much larger length scales ~ >100nm
2. Crystalline materials
A. Materials comprised of one or many small crystals or grains
B. Single crystal material : useful in electronic and optical applications
C. Polycrystalline material : comprised of many crystals with varying orientations in space
D. Grain : a crystal in a polycrystalline material
E. Grain boundaries : regions between grains of a polycrystalline material
B. Amorphous materials : principles and technological applications
C. Lattice, unit cells, basis, and crystal structures
i. Lattice : collection of points that divide space into smaller equally sized segments
ii. Lattice points : points that make up the lattice
iii. Motif or basis : a group of atoms associated with a lattice point
iv. Crystal structure : lattice + basis
v. Unit cell : a subdivision of the lattice that still retains the overall characteristics of the entire
lattice
Characteristics of the seven crystal systems
Structure Axes Angles between axes Volume of the unit cell
Cubic a = b = c All angled equal 90 a3
Tetragonal a = b ≠ c All angled equal 90 a2b
Orthorhombic a ≠ b ≠ c All angled equal 90 abc
Hexagonal a = b ≠ c Two angles equal 90
One angle equals 120
a2c × cos 30
Rhombohedral
or trigonal
a = b = c All angles are equal and none
equals 90
a3√1 − 3 cos2 α + 2 cos3 α
Monoclinic a ≠ b ≠ c Two angles equal 90
One angle is not equal to 90
abc sin β
Triclinic a ≠ b ≠ c All angles are different and
none equals 90
abc√1 − cos2 α − cos2 β − cos2 γ + 2 cos α cos β cos γ
vi. Lattice parameter
1. Describe the size and shape of the unit cell
2. 1 nanometer (nm) = 10−9m = 10−7cm = 10Å
3. 1 angstrom (Å) = 0.1nm = 10−10m = 10−8cm
vii. Number of atoms per unit cell
1. Atoms/lattice point * lattice points/unit cell
2. In most metals, one atom is located at each lattice point

3. SC : 1, BCC : 2, FCC : 4
viii. Atomic radius versus lattice parameter
1. Close-packed direction : directions in the unit cell which atoms are in continuous contact
2. Using these directions to calculate the relationship; radius and lattice parameter
ix. Coordination number
1. The number of atoms touching a particular atom
2. One indication of how tightly and efficiently atoms are packed together
x. Packing factor
1. The fraction of space occupied by atoms, assuming that atoms are hard spheres
2. Packing factor = (number of atoms cell⁄ )(volume of each atom)
volume of unit cell
3. Packing factor is independent of the radius of atoms, as long as we assume that all atoms
have a fixed radius
4. Close-packed structure : structures showing a packing fraction of 0.74(FCC and HCP)
5. Metals with only metallic bonding are packed as efficiently ad possible
6. Metals with mixed bonding, such as iron, may have unit cells with less than the maximum
packing factor
xi. Density
1. Density ρ = (number of atoms cell⁄ )(atomic mass)
(volume of unit cell)(Avogadro′s number)
xii. The hexagonal closed-packed structure
1. A special form of the hexagonal structure
2. c0
a0=
2√6
3 ≒ 1.633, differ slightly because of mixed bonding
Crystal structure characteristics of some metals
Structure 𝐚𝟎 versus r Atoms per cell Coordination
number
Packing
factor
Examples
SC a0 = 2r 1 6 0.52 Polonium(Po), α-Mn
BCC a0 = 4r √3⁄ 2 5 0.68 Fe, Ti, W, Mo, Nb, Ta, K,
Na, V, Zr, Cr
FCC a0 = 4r √2⁄ 4 12 0.74 Fe, Cu, Pt, Ag, Pb, Ni
HCP a0 = 2r
c0 = 2√6
3a0
2 12 0.74 Ti, Mg, Zn, Be, Co, Zr, Cd
D. Allotropic or polymorphic transformations
i. Have more than one crystal structure
ii. Allotropy : in pure elements
iii. Polymorphism : in used for compounds
E. Points, directions, and planes in the unit cell
i. Coordinates of points
ii. Directions in the unit cell
1. The procedure for finding the Miler indices for directions
A. Using a right-handed coordinate system, determine the coordinates of two points that
lie on the direction

B. Subtract the coordinates of the “tail” point from the coordinates of the “head” point to
obtain the number of lattice parameters traveled in the direction of each axis of the
coordinate system
C. Clear fractions and/or reduce the results obtained from the subtraction to lowest
integers
D. Enclose the numbers in square brackets [ ]. If a negative sign is produced, represent the
negative sign with a bar over the number
2. Important aspects
A. Because directions are vectors, A direction and its negative are not identical
B. A direction and its multiple are identical
C. Certain groups of directions are equivalent ex) <1 1 0>
iii. Significance of crystallographic directions
iv. Repeat distance, linear density, and packing fraction
1. Repeat distance : the distance from one lattice point to the adjacent lattice point along a
direction
2. Linear density : the number of lattice points per unit length
3. Packing fraction : the fraction actually covered by atoms
v. Planes in the unit cell
1. Metals deform easily along planes of atoms that are most tightly packed together
2. The procedure for finding the Miler indices for planes
A. Identify the points at which the plane intercepts the x, y, and z coordinates in terms of
the number of lattice parameters. If the plane passes through the origin, the origin of
the coordinate system must be moved!
B. Take reciprocals of these intercepts
C. Clear fractions but do not reduce to lowest integers
D. Enclose the resulting numbers in parentheses ( ). Again, negative numbers should be
written with a bar over the number
3. Important aspects
A. Planes and their negatives are identical
B. Planes and their multiples are not identical
i. Planar density : the number of atoms per unit area
ii. Packing fraction : the fraction of the area of that plane actually covered by these
atoms
C. Planes of a form : groups of equivalent planes having notation { }
D. In cubic systems, a direction that has the same indices as plane is perpendicular to that
plane
4. Construction of directions and planes
5. Miller indices for hexagonal unit cells
A. Miller-Bravais indices
i. [h k i l]
ii. h + k = -i
iii. Three-axis to four-axis notation
1. h = (2h’ – k’)/3
2. k = (2k’ – h’)/3
3. i = -(h’ + k’)/3
4. l = l’
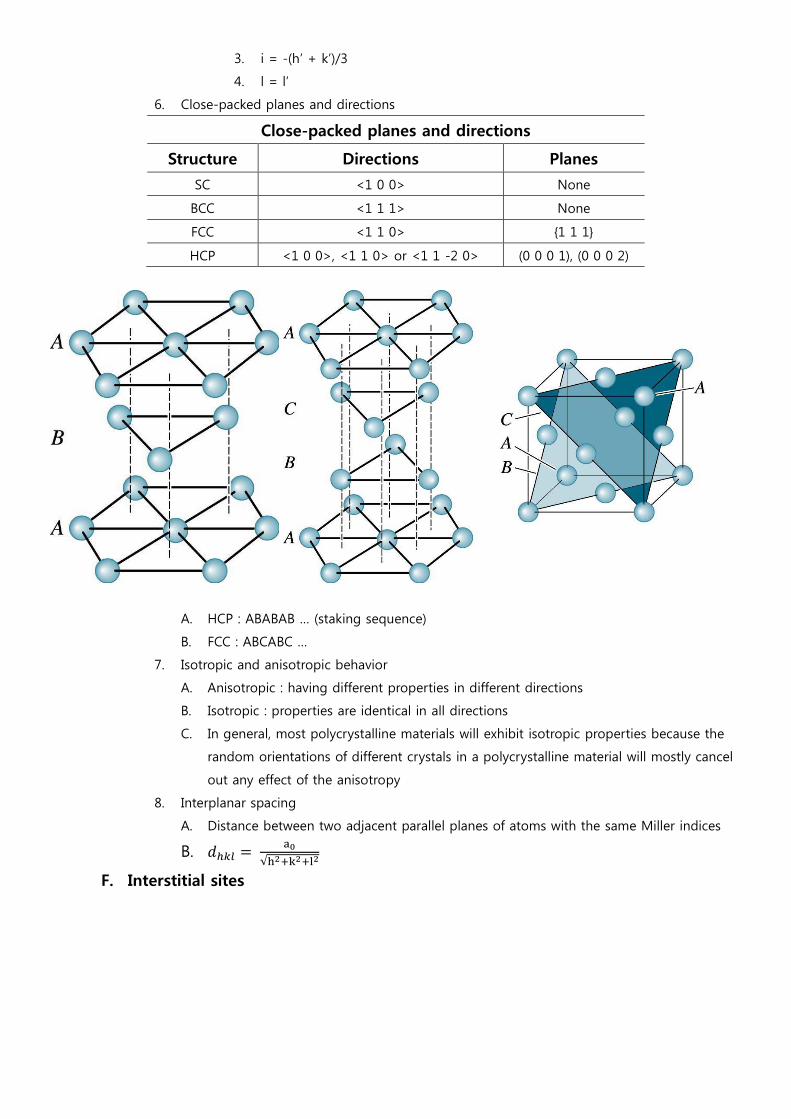
6. Close-packed planes and directions
Close-packed planes and directions
Structure Directions Planes
SC <1 0 0> None
BCC <1 1 1> None
FCC <1 1 0> {1 1 1}
HCP <1 0 0>, <1 1 0> or <1 1 -2 0> (0 0 0 1), (0 0 0 2)
A. HCP : ABABAB … (staking sequence)
B. FCC : ABCABC …
7. Isotropic and anisotropic behavior
A. Anisotropic : having different properties in different directions
B. Isotropic : properties are identical in all directions
C. In general, most polycrystalline materials will exhibit isotropic properties because the
random orientations of different crystals in a polycrystalline material will mostly cancel
out any effect of the anisotropy
8. Interplanar spacing
A. Distance between two adjacent parallel planes of atoms with the same Miller indices
B. 𝑑ℎ𝑘𝑙 = a0
√h2+k2+l2
F. Interstitial sites

i. Cubic site in SC(1 basis) : 1 interstitial sites, each has 1 atoms
ii. Tetrahedral site in BCC(2 basis) : 24 interstitial sites, each has 1/2 atoms
iii. Octahedral site in BCC(2 basis) : 6 interstitial sites, each has 1/2 atoms
iv. Tetrahedral site in FCC(4 basis) : 8 interstitial sites, each has 1 atoms
v. Octahedral site in FCC(4 basis) : 12+1 interstitial sites, first has 1/4 and last has 1 atoms
The coordination number and the radius ratio
Coordination number Location of interstitial Radius ratio
2 Linear 0 ~ 0.155
3 Center of triangle 0.155 ~ 0.225
4 Center of tetrahedron 0.225 ~ 0.414
6 Center of octahedron 0.414 ~ 0.732
8 Center of cube 0.732 ~ 1.000
G. Crystal structures of ionic materials
i. Using charge balance and radius ratio
ii. Cesium chloride structure
1. Simple cubic structure
2. Coordinate number : 8
3. Possible when the anion and cation have the same valence
4. Bigger atom places in cubic site
iii. Sodium chloride structure
1. Coordinate number : 6
2. FCC structure with octahedral sites
3. Both ion has the same valence
4. Smaller atoms place in octahedral sites
iv. Zinc blende structure
1. Coordinate number : 4
2. FCC structure with 4 tetrahedral sites

3. Both ion has the same valence
4. Bigger atoms place in tetrahedral sites
v. Fluorite structure
1. FCC structure with 8 tetrahedral sites
2. Possible when one ion have twice valence than the other
3. Bigger atoms place in tetrahedral sites
vi. Perovskite structure
vii. Corundum structure
H. Covalent structures
I. Diffraction techniques for crystal structure analysis

4. Imperfections in the atomic and ionic arrangements
A. Point defects
i. Vacancies
1. Produced when an atom or an ion is missing from its normal site in the crystal structure
2. nv = n exp (−Qv
RT)
A. nv = the number of vacancies per cm3
B. n = the number of atoms per cm3
C. Qv = the energy required to produce one mole of vacancies, in cal/mol or Joules/mol
D. R = the gas constant, 1.987cal
mol−K or 8.31
Joules
mol−K
E. T = the temperature in degrees Kelvin
ii. Interstitial defects
1. Formed when an extra atom or ion is inserted into the crystal structure at a normally
unoccupied position
2. The surrounding crystal region is compressed and distorted
3. One way of increasing the strength of metallic materials
iii. Substitutional defects
1. Introduced when one atom or ion is replaced by a different type of atom or ion
B. Other point defects
C. Dislocations
i. Introduced typically into the crystal during solidification of the material or when the material is
deformed permanently
ii. Screw dislocations
1. Burgers vector b : the vector required to complete the loop
2. Burgers vector is parallel to the screw dislocation
iii. Edge dislocations
1. Burgers vector is perpendicular to the dislocation
2. The atoms above the disloacation line are squeezed too closely together
3. The atoms below the dislocation are stretched too far apart
iv. Mixed dislocations
v. Slip
1. The process by which a dislocation moves and causes a metallic material to deform
2. Slip direction
A. The direction which the dislocation moves
B. Equal to the Burgers vector for edge dislocations
C. Perpendicular to the Burgers vector for screw dislocations
3. Slip plane : the plane swept out by the dislocation line during slip
4. Slip system = slip direction + slip plane
5. Peierls-Nabarro stress
A. τ = c exp (−k𝑑/b)
B. τ : the shear stress required to move the dislocation
C. 𝑑 : the interplanar spacing between adjacent slip spanes
D. b : the magnitude of the Burgers vector

E. c, k : constants for material
6. Factors determine the most likely slip systems that will be active
A. Slip direction should have a small repeat distance or high linear density
B. Slip planes are typically close-packed planes or those ad closely packed ad possible
Slip planes and directions in metallic structures
Crystal structure Slip plane Slip direction
BCC metals {1 1 0}
{1 1 2}
{1 2 3}
<1 1 1>
FCC metals {1 1 1} <1 1 0>
HCP metals {0 0 0 1}
{1 1 -2 0}
{1 0 -1 0}
{1 0 -1 1}
<1 0 0>
<1 1 0>
MgO, NaCl (ionic) {1 1 0} <1 1 0>
Silicon (covalent) {1 1 1} <1 1 0>
C. Dislocations do not move easily in materials, which have covalent bonds or ionic bonds
D. Significance of dislocations
i. Dislocations are most significant in metals and alloys since they provide a mechanism for plastic
doformation
ii. Slip provided ductility in metals
iii. We control the mechanical properties of a metal or alloy by interfering with the movement of
dislocations
E. Schmid’s law
i. τr = σ cos ϕ cos λ
ii. τr = Fr
A= resolved shear stress in the slip direction
iii. σ = F
A= unidirectional stress applied to the cylinder
iv. ϕ = the angle between the normal to the slip plane and the applied force
These planes are active in some metals and alloys or at elevated temperatures

v. λ = the angle between the slip direction and the applied force
vi. the sum of angles ϕ and λ can be but does not have to be 90°
vii. critical resolved shear stress( τcrss ) : the shear stress required to break enough metallic bonds
in order for slip occur
F. Influence of crystal structure
G. Surface defects
i. Material surface
ii. Grain boundaries
1. Grain : one of the crystals present in a polycrystalline material
2. Grain boundary : a surface defect representing the boundary between grains
3. Hall-petch equation
A. Controlling the grain size
B. the grain size↓ → the number of grains↑ → the amount of grain boundary area↑ →
dislocation moves only a short distance → the strength of the metallic material↑
C. σy = σ0 + Kd−0.5
i. d : the average diameter of the grains [ mm−.05 ]
ii. σ0, K : constants for the metal [ MPa ]
iii. σy : yield strength of a metallic material [ MPa ]
D. This equation is not valid for materials with unusually large or ultrafine grains
iii. Small angle grain boundaries
iv. Stacking faults : interfere with the slip process
v. Twin boundaries : interfere with the slip process and increase the strength of the metal
H. Importance of defects

5. Atom and ion movements in materials
A. Applications of diffusion
i. Diffusion : the net flux of any species, magnitude of this flux depends upon the initial
concentration gradient and temperature
B. Stability of atoms and ions
i. The rate of atom or ion movement is related to temperature by Arrhenius equation
1. Rate = c0 exp (−Q
RT) or ln(rate) = ln(𝑐0) −
Q
RT
A. c0 = constant
B. R = gas constant ( 1.987cal
mol−K )
C. T = absolute temperature ( K )
D. Q = activation energy ( ca/mol )
C. Mechanisms for diffusion
i. Vacancy diffusion
ii. Interstitial diffusion : As in Fe-C system, when the atomic size difference is big, no vacancy is
required fir C to diffuse to Fe
iii. Self diffusion : diffusion in pure metals
D. Activation energy for diffusion
i. Qv > Qi
E. Rate of diffusion [Fick’s First Law]
i. J = −Ddc
dx
1. J = the flux, the number of atoms passing through a plane of unit area per unit time
2. D = diffusivity, diffusion coefficient ( cm2
s )
3. dc
dx = concentration gradient (
atoms
cm3∗cm ), constant, steady state
ii. D = D0 exp (−Q
RT)
F. Factors affecting diffusion

G. Permeability of polymers
H. Composition profile [Fick’s Second Law]
i. If the concentration gradient change with time(= non steady state), use this law
ii. ∂c
∂t=
∂
∂x(D
∂c
∂x), if D ≠ f(x, c), then
Cs− Cx
Cs− C0= erf (
x
2√Dt)
1. Cs = constant concentration of the diffusing atoms at the surface of the material
2. C0 = the initial uniform concentration of the diffusing atoms in the material
3. Cx = the concentration of the diffusing atom at location x below the surface after time t
I. Diffusion and materials processing

6. Mechanical properties: fundamentals and tensile, hardness,
and impact testing
A. Technological significance
B. Terminology for mechanical properties
Symbols
stress strain
Tensile σ ε
shear τ γ
i. Young’s modulus (E) : the slope of a tensile stress-strain curve in the linear regime
ii. The compliance of the material : the inverse of Young’s modulus
iii. Shear modulus (G) : the slope of a shear stress-strain curve in the linear regime
C. The tensile test : use of the stress-strain diagram
i. Engineering stress and strain
1. Engineering stress = σ = F
A0
2. Engineering strain = ε = Δl
l0
A. A0 = the original cross-sectional area of the specimen before the test begins
B. l0 = the original distance between the gage marks
C. Δl = the change in length after force F is applied
3. 1 N m2⁄ = 1 Pa, 1 Pa = 10−6 MPa
4. psi : pounds per square inch
5. 1 lb = 4.448N
6. 1 MPa = 0.145 ksi = 145 psi
D. Properties obtained from the tensile test
i. Elastic limit : the critical stress value needed to initiate plastic deformation
1. In metallic materials, this is usually the stress required for dislocation motion, or slip to be
initiated
2. In polymeric materials, this stress will correspond to disentanglement of polymer molecule
chains or sliding of chains past each other
ii. Proportional limit : the level of stress above which the relationship between stress and strain is
not linear
iii. Both limit point can not be determined precisely → Use offset strain value(typically, 0.2%)
iv. Engineers normally prefer to use the offset yield strength for design purposes
v. Tensile strength
1. The stress obtained at the highest applied force
2. Necking : local deformation causing reduction in the cross-sectional area of a tensile
specimen
3. The tensile strength is the stress at which necking begins in ductile materials
vi. Elastic properties
1. Binding forces, and thus the modulus of elasticity are typically higher for high melting-point
materials

2. Young’s modulus is a measure of the stiffness of a component
3. The modulus of resilience ( Er ) : the maximum elastic energy absorbed by a material when
a load is applied, Er =1
2× yield strength × strain at yielding
4. Poisson’s ratio ( μ ) : the ratio between the lateral and longitudinal strains in the elastic
region, μ = −εlateral
εlongitudinal
vii. Tensile toughness : the energy absorbed by a material prior to fracturing
viii. Ductility
1. The ability of a material to be permanently deformed without breaking when a force is
applied
2. % Elongation = lf − l0
l0 × 100, lf is the distance between gage marks after the specimen
breaks
3. % Reduction in area = A0− Af
A0 × 100, Af is the final cross-sectional area at the fracture surface
ix. Effect of temperature
1. Yield strength, tensile strength, and modulus of elasticity decrease at higher temperatures,
whereas ductility commonly increases
E. True stress and true strain
i. True stress = σt = F
A
ii. True strain = ∫dl
l= ln (
l
l0) = ln (
A0
A)
1. In plastic deformation we assume a constant volume
2. The expression ln (A0
A) should be used after necking begins
iii. True stress continues to increase after necking because, although the load required decreases,
the area decreases even more
F. The bend test for brittle materials
i. Flexural strength for three-point bend test = 3FL
2wh2 = σbend, stress at fracture
ii. Flexural modulus(modulus of elasticity in bending) = L3F
4wh3δ= Ebend
1. δ = the deflection of the beam when a force F is applied
iii. The four-point bend test is better suited for testing materials containing flaws
G. Hardness of materials
i. Hardness : resistance to penetration of the surface of a material by a hard object
H. Strain rate effects and impact behavior
I. Properties obtained from the impact test
i. Ductile to brittle transition temperature (DBTT)
1. The temperature at which a material changes from ductile to brittle fracture
2. BCC metals have DBTT
3. Most FCC metals do not have
ii. Notch sensitivity
iii. Relationship to the stress-strain diagram
iv. Use of impact properties

7. Fracture mechanics, fatigue, and creep behavior
A. Fracture mechanics
i. Fracture mechanics : the study of a material’s ability to withstand stress in the presence of a flaw
ii. Flaw : small pores(holes) , inclusions, or micro-cracks, not refer to vacancies, dislocations
iii. Fracture toughness : the resistance of a material to failure in the presence of a flaw
iv. K = fσ√πα
1. K : stress intensity factor
2. f : geometry factor for the specimen and flaw, edge : 1.12, internal : 1.0
3. σ : applied stress
4. α : the flaw size
v. Kc : fracture toughness, K required for a crack to propagate
vi. As thickness increases, fracture toughness Kc decreases to a constant value
vii. KIc : the plane strain fracture toughness, material property, not depend upon the thickness
Group 1 : engineering alloys, possess both high fracture toughness and strength
Group 2 : engineering ceramics, high strength but low fracture toughness
Group 3 : engineering polymers, possess both low fracture toughness and strength
viii. The factors to influence to materials ability of resist the growth of a crack
1. Larger flaws reduce the permitted stress
2. The ability of material to deform is critical, strength of a metal↑ → ductility↓ and gives a
lower fracture toughness
3. Thicker, more rigid pieces of a given material have a lower fracture toughness than thinner
materials
4. Increasing the rate of application of the load typically reduces the fracture toughness of the
material
5. Increasing the temperature normally increased the fracture toughness
6. A small grain size normally improves fracture toughness, whereas more point defects and
dislocations reduce fracture toughness
B. The importance of fracture mechanics
1.The property of the material
2.The stress that the material must withstand
3.The size of the flaw
If we know two of these variables, the third can be determined
i. Brittle fracture
A. The actual stress at the crack tip

i. σactual ≅ 2σ√a r⁄ , r : radius of the crack
B. Griffith equation
i. σcritical ≅ 2σ√Eγ
πα
ii. α : the length of a surface crack (or one-half the length of an internal crack)
iii. γ : the surface energy (per unit area)
C. Microstructural features of fracture in metallic materials
i. Ductile fracture
1. Normally occurs in a transgranular manner ( through the grains )
2. Caused by simple overloads, or by applying too high a stress
ii. Brittle fracture
1. Frequently observed when impact, rather than overload
2. Little or no plastic deformation is required
D. Microstructural features of fracture in ceramics, glasses, composites
E. Weibull statistics for failure strength analysis
F. Fatigue
i. Fatigue : the lowering of strength or failure of a material due to repetitive stress which may be
above or below the yield strength
ii. Fatigue failures in three stage
1. A tiny crack initiates or nucleates typically at the surface, often at a time well after loading
begins
2. The crack gradually propagates as the load continues to cycle
3. A sudden fracture of the material occurs when the remaining cross-section of the material is
too small to support the applied load
iii. Normally concerned with fatigue of metallic and polymeric materials
iv. Rotating cantilever beam test
1. ±σ = 32 Μ
πd3 = 5.09FL
d3
G. Results of the fatigue test
i. Endurance limit
1. The stress below which there is a 50% probability that failure by fatigue will never occur
2. Recent research on many metals has shown that probably an endurance limit does not exist
ii. Endurance ratio allows us to estimate fatigue properties from the tensile test
H. Application of fatigue testing
I. Creep, stress rupture, and stress corrosion
i. Creep : a time dependent permanent deformation under a constant load or constant stress and
at high temperatures
ii. Stress rupture : when a material does actually creep and then ultimately break the fracture
iii. Ductile stress-rupture generally occur at high creep rates and relatively low exposure
temperatures and have short rupture times
iv. Brittle stress-rupture usually show little necking and occur more often at smaller creep rates and
high temperatures
v. Stress corrosion : a phenomenon in which materials react with corrosive chemicals in the
environment

J. Evaluation of creep behavior

8. Strain hardening and annealing A. Relationship of cold working to the stress-strain curve






![Engineering Graphics Essentials [4th Edition]](https://static.fdocuments.us/doc/165x107/586829cc1a28ab4a408be724/engineering-graphics-essentials-4th-edition.jpg)











