Lysis and Beyond: ESC Guidelines and Reality J N Townend Queen Elizabeth Hospital Birmingham.
Upload
edward-milesCategory
view
213download
0
Esci 203, Earth Structure and Deformation
Introduction to the global positioning system (GPS)
John Townend
EQC Fellow in Seismic Studies

Recent events
Preliminary GPS displacement data (version 0.1) provided by the ARIA
team at JPL and Caltech. All Original GEONET RINEX data provided to
Caltech by the Geospatial Information Authority (GSI) of Japan.

Overview
• What is GPS– A space-based Global Positioning System
• How does it work?– Trilateration using very accurate timing
measurements
• What are some of its limitations?
• How can earth scientists use it?– General positioning, deformation monitoring…

What is GPS?
• Space segment, Navstar– 24 satellites orbiting at an
altitude of ~20,000 km
• Control segment– 5 ground stations
• User segment– Users with GPS receivers
Global
Positioning
System

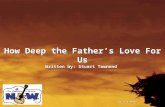
Campaign and permanent GPS
Campaign (temporary) GPS station
Pu`u O`o, Kilauea, Hawai`i
Continuous (permanent) GPS station
Gisborne, New Zealand
Figures courtesy of Peter Cervelli, HVO, and Land Information New Zealand

The satellite signal
• Each satellite transmits low-power (20–50 W) signals on various frequencies– Civilian receivers listen at 1575.42 MHz
• The receiver determines the signal travel time from the satellite– With four or more satellites, the receiver
can determine its latitude, longitude, altitude, and internal clock error

Pseudo-random codes
• The signal emitted by each satellite is unique and extremely complex (“pseudo-random”)
• The receiver generates the same signal, and compares it with what it receives from the satellite to determine the travel time
Receiver
signal
Satellite
signal
t

Extra steps
• What is the time? – Each satellite carries an atomic clock but the
receiver’s internal clock is much less accurate– So, the receiver uses an extra satellite signal to
estimate the difference in time between it’s onboard clock and the standardised satellite time
• And where are the satellites exactly?– The control stations measure each satellite’s
ephemeris very precisely; this data is broadcast to the satellites and included in the GPS signal

Trilateration
distance = travel time speed of light
Sat1
Sat3
Sat2
Sat4
The receiver determines the distance (“pseudo-range”) to 4+
satellites, and calculates its position; it’s like locating an
earthquake in reverse!

Sources of error
• Ionospheric/tropospheric delays
• Multi-pathing
• Receiver clock errors
• Ephemeris errors
• Constellation geometry and weather
• Intentional signal degradation:– “selective availability”, which limited accuracy to
~6–12 m but has now been switched off

Selective availability
Figure courtesy of Peter Cervelli, HVO

Geometric dilution of precision
High GDOP; low confidence Low GDOP; high confidence

Differential GPS (“dGPS”)G
PS sign
al
GPS signal
dGPS correctionsignal
Satellite
Reference station Mobile receiver
Reference stations broadcast corrections to the satellites’
signals; typical dGPS accuracy is ~1–5 m

A typical permanent GPS installation

Geodetic velocities
We commonly make use of the east and north components of
velocity, vE and vN
The overall velocity vector v has a magnitude (length), v2 = vE
2 + vN2,
and an azimuth = atan (vE/vN)
vE
vN v

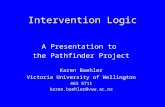
Measuring velocities
The velocity in each direction
(east, north, up) is just the gradient of the position time
series

Measuring velocities
The velocity in each direction
(east, north, up) is just the gradient of the position time
series
e.g. vN = n/t
t
n

Relative motion (1)
vplane-air
vair-ground
vplane-ground = vplane-air + vair-ground

Relative motion (2)
vA-B
vB-ref
vA-ref = vA-B + vB-ref
meaning that
vA-B = vA-ref – vB-ref = vA-ref + (– vB-ref)

Relative motion (3)
Site A
Site B
vA
vB
vA
vB
–vB
vA-B

Summary
• Points to revise– How GPS basically works– Key factors affecting position estimates– Measuring site velocities from GPS data
and relative velocities between sites
• Extra material online– http://ww2.trimble.com/gps_tutorial

Reading material
• Van der Pluijm and Marshak– Section 14.9
• Fowler (2005)– Sections 2.1 and 2.2
• Mussett and Khan– Section 20.5
• If you need to brush up on vectors, try “Mathematics : a simple tool for geologists”, by Waltham; this is in the library