
ES 240 Final Project Impact Strength of a Hand-Made Bashring Tom Milnes – 12/09/2008.

ES 240: Scientific and Engineering Computation. Interpolation
PolynomialPolynomial
Definition– a function f(x) that can be written as a finite series of power functions
like
– fn is a polynomial of order n– A polynomial is represented by coefficient vector from highest power.– p1=[3 -5 -7 1 9] p1(x) = 3x4 - 5x3 – 7x2 + x + 9
in
iin xaxf ∑
=
=0
)(

ES 240: Scientific and Engineering Computation. Interpolation
Polynomial OperationsPolynomial Operations
poly(r)– convert roots to a polynomial– r=[ 1 2 3 ]; poly(r)
roots(p)– find roots of a polynomial– p=[ 2 3 4 ]– roots(p)
Y = polyval(p, x)– returns the value of a polynomial, p(x). – P is a vector of length N+1 whose elements are the coefficients of the
polynomial in descending powers.– p=[3 -5 -7 1 9] p(x) = 3x4 - 5x3 – 7x2 + x + 9

ES 240: Scientific and Engineering Computation. Interpolation
Polynomial OperationsPolynomial Operations
P = polyfit(x, y, n)– Returns the least squares fit coefficients of a polynomial
p(x) of degree n– P is of length N+1.
conv(p1,p2)– multiply two polynomials p1 and p2– conv(p1,p2)[q r]=deconv(p1,p2)– polynomials p1 divide by p2, where q is quotient and r is
remainder– [q r]=deconv(p1,p2)
ES 240: Scientific and Engineering Computation. Interpolation
Polynomial OperationsPolynomial Operations
polyint(p,c)– integrate of polynomial p with integration constant c
(default 0)– polyint(p)– polyint(p,1)
polyder(p)– differentiate polynomial p respective to x– >> polyder(p)

ES 240: Scientific and Engineering Computation. Interpolation
Curve FittingCurve Fitting
Applications– Estimating the value of points between discrete values– Simplifying complicated functions
Methods– Interpolation
• Data are very precise • curve passes through all points
– curve fitting• Data are just approximations• curve represent a general trend of the data

ES 240: Scientific and Engineering Computation. Interpolation
Curve Fitting and InterpolationCurve Fitting and Interpolation
Curve Fitting(linear or non-linear)
Linear Interpolation(most popular interpolation)
Other Interpolation(higher order polynomial,
spline, nearest,…)

ES 240: Scientific and Engineering Computation. Interpolation
Linear InterpolationLinear Interpolation
The linear interpolation is achieved by fitting a line between two known data points
The resulting formula based on known points x1 and x2 and the values of the dependent function at those points is:
f1 x( )= f x1( )+f x2( )− f x1( )
x2 − x1
x − x1( )

ES 240: Scientific and Engineering Computation. Interpolation
Quadratic (Polynomial) InterpolationQuadratic (Polynomial) Interpolation
One problem that can occur with solving for the coefficients of a polynomial is that the system to be inverted is in the form:
Matrices such as that on the left are known as Vandermonde matrices, and they are very ill-conditioned - meaning their solutions are very sensitive to round-off errors.The issue can be minimized by scaling and shifting the data.
x1n−1 x1
n−2 L x1 1x2
n−1 x2n−2 L x2 1
M M O M Mxn−1
n−1 xn−1n−2 L xn−1 1
xnn−1 xn
n−2 L xn 1
⎡
⎣
⎢ ⎢ ⎢ ⎢ ⎢
⎤
⎦
⎥ ⎥ ⎥ ⎥ ⎥
p1p2M
pn−1pn
⎧
⎨ ⎪ ⎪
⎩ ⎪ ⎪
⎫
⎬ ⎪ ⎪
⎭ ⎪ ⎪
=
f x1( )f x2( )
Mf xn−1( )f xn( )
⎧
⎨
⎪ ⎪
⎩
⎪ ⎪
⎫
⎬
⎪ ⎪
⎭
⎪ ⎪
ES 240: Scientific and Engineering Computation. Interpolation
Newton Interpolating PolynomialsNewton Interpolating Polynomials
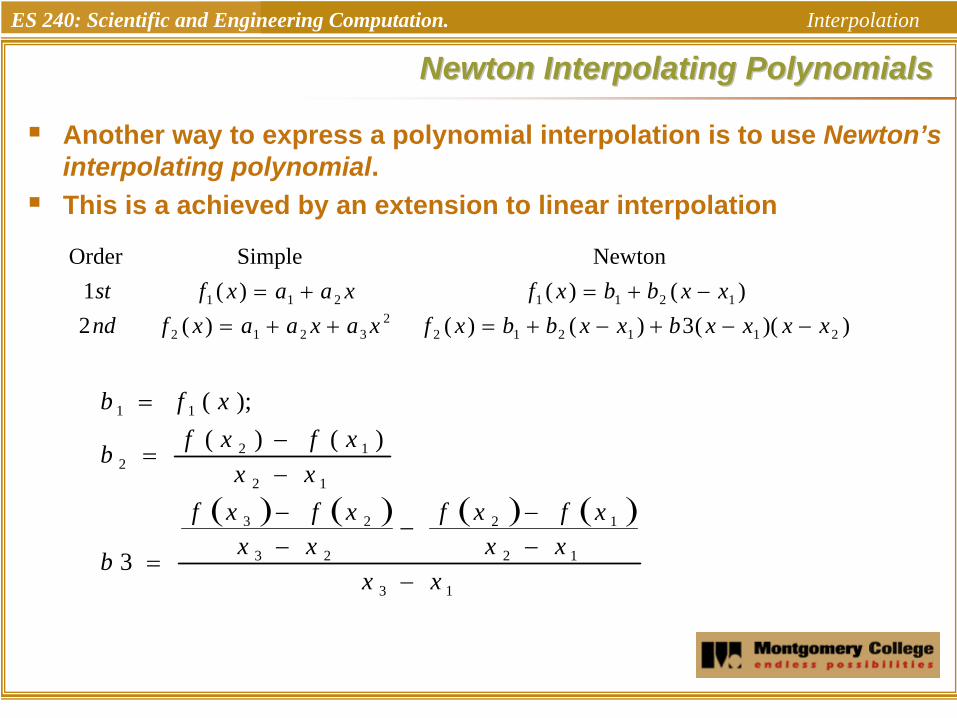
Another way to express a polynomial interpolation is to use Newton’s interpolating polynomial.This is a achieved by an extension to linear interpolation
))((3)()()(2)()()(1
NewtonSimpleOrder
2112122
3212
1211211
xxxxbxxbbxfxaxaaxfndxxbbxfxaaxfst
−−+−+=++=−+=+=
( ) ( ) ( ) ( )
13
12
12
23
23
12
122
11
3
)()();(
xxxx
xfxfxx
xfxf
b
xxxfxfb
xfb
−−−
−−−
=
−−
=
=

ES 240: Scientific and Engineering Computation. Interpolation
Newton Interpolating Polynomials (cont)Newton Interpolating Polynomials (cont)
The second-order Newton interpolating polynomial introduces some curvature to the line connecting the points, but still goes through the first two points.
The resulting formula based on known points x1, x2, and x3 and the values of the dependent function at those points is:
( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( )
( )( )2113
12
12
23
23
112
1212 xxxx
xxxx
xfxfxx
xfxf
xxxx
xfxfxfxf −−−
−−
−−−
+−−−
+=

ES 240: Scientific and Engineering Computation. Interpolation
GeneralizationGeneralizationAn (n-1)th Newton interpolating polynomial has all the terms of the (n-2)th polynomial plus one extra.
The general formula is:where
and the f[…] represent divided differences.
fn−1 x( )= b1 + b2 x − x1( )+L+ bn x − x1( ) x − x2( )L x − xn−1( )
b1 = f x1( )b2 = f x2, x1[ ]b3 = f x3, x2, x1[ ]M
bn = f xn, xn−1,L, x2 , x1[ ]

ES 240: Scientific and Engineering Computation. Interpolation
Divided DifferencesDivided Differences
Divided difference are calculated as follows:
Divided differences are calculated using divided difference of a smaller number of terms:
f xi , x j[ ]=f xi( )− f x j( )
xi − xj
f xi , x j , xk[ ]=f xi , xj[ ]− f x j , xk[ ]
xi − xk
f xn, xn−1,L, x2, x1[ ]=f xn, xn−1,L, x2[ ]− f xn−1, xn−2,L, x1[ ]
xn − x1
ES 240: Scientific and Engineering Computation. Interpolation
ExampleExample
15.115.1
Do by handDo by hand
Use the Use the newtintnewtint functionfunction

ES 240: Scientific and Engineering Computation. Interpolation
Lagrange Interpolating PolynomialsLagrange Interpolating Polynomials
Weighted average of the two values being connectedThe differences between a simple polynomial and Lagrange interpolating polynomials for first and second order polynomials is:
where the Li are weighting coefficients that are functions of x.
Order Simple Lagrange1st f1(x) = a1 + a2x f1(x) = L1 f x1( )+ L2 f x2( )2nd f2 (x) = a1 + a2x + a3x
2 f2 (x) = L1 f x1( )+ L2 f x2( )+ L3 f x3( )

ES 240: Scientific and Engineering Computation. Interpolation
Lagrange Interpolating Polynomials (cont)Lagrange Interpolating Polynomials (cont)
The first-order Lagrange interpolating polynomial may be obtained from a weighted combination of two linear interpolations, as shown.
The resulting formula based on known points x1 and x2 and the values of the dependent function at those points is:
f1(x) = L1 f x1( )+ L2 f x2( )
L1 =x − x2
x1 − x2
, L2 =x − x1
x2 − x1
f1(x) =x − x2
x1 − x2
f x1( )+x − x1
x2 − x1
f x2( )

ES 240: Scientific and Engineering Computation. Interpolation
Lagrange Interpolating Polynomials (cont)Lagrange Interpolating Polynomials (cont)
In general, the Lagrange polynomial interpolation for n points is:
where Li is given by:
fn−1 xi( )= Li x( ) f xi( )i=1
n
∑
Li x( )=x − xj
xi − x jj=1j≠i
n
∏

ES 240: Scientific and Engineering Computation. Interpolation
ExampleExample
15.115.1
Solve by handSolve by hand
Use the Use the lagrangelagrange functionfunction
ES 240: Scientific and Engineering Computation. Interpolation
ExtrapolationExtrapolation
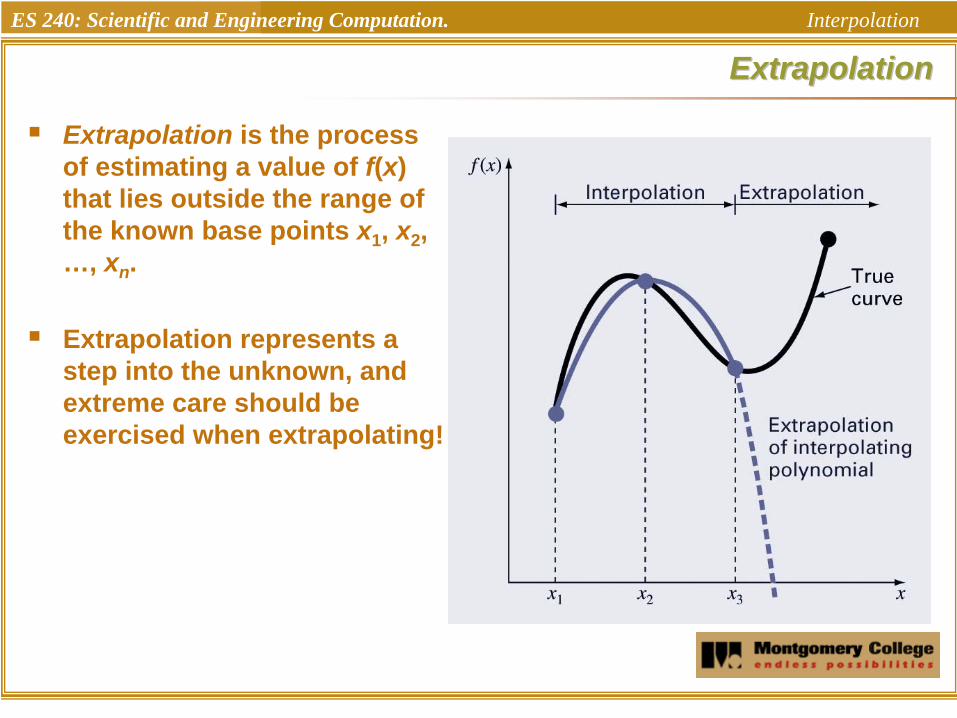
Extrapolation is the process of estimating a value of f(x) that lies outside the range of the known base points x1, x2, …, xn.
Extrapolation represents a step into the unknown, and extreme care should be exercised when extrapolating!

ES 240: Scientific and Engineering Computation. Interpolation
Extrapolation HazardsExtrapolation Hazards
World population using a 7th order polynomial extrapolation.

ES 240: Scientific and Engineering Computation. Interpolation
OscillationsOscillations
Higher-order polynomials can not only lead to round-off errors due to ill-conditioning, but can also introduce oscillations to an interpolation or fit where they should not be.
In the figures below, the dashed line represents a function, the circles represent samples of the function, and the solid line represents the results of a polynomial interpolation:

ES 240: Scientific and Engineering Computation. Interpolation
Introduction to SplinesIntroduction to Splines
An alternative approach to using a single (n-1)th order polynomial to interpolate between n points is to apply lower-order polynomials in a piecewise fashion to subsets of data points.
These connecting polynomials are called spline functions.
Splines minimize oscillations and reduce round-off error due to their lower-order nature.

ES 240: Scientific and Engineering Computation. Interpolation
Higher Order vs. SplinesHigher Order vs. Splines
Splines eliminate oscillations by using small subsets of points for each interval rather than every point. This is especially useful when there are jumps in the data:
a) 3rd order polynomialb) 5th order polynomialc) 7th order polynomiald) Linear spline
• seven 1st order polynomials generated by using pairs of points at a time

ES 240: Scientific and Engineering Computation. Interpolation
Spline DevelopmentSpline Development
a) First-order splines find straight-line equations between each pair of points that
• Go through the pointsb) Second-order splines find quadratic
equations between each pair of points that
• Go through the points• Match first derivatives at the interior
pointsc) Third-order splines find cubic
equations between each pair of points that
• Go through the points• Match first and second derivatives at
the interior points
Note that the results of cubic spline interpolation are different from the results of an interpolating cubic.

ES 240: Scientific and Engineering Computation. Interpolation
Spline DevelopmentSpline Development
Spline function (si(x))coefficients are calculated for each interval of a data set.The number of data points (fi) used for each spline function depends on the order of the spline function.

ES 240: Scientific and Engineering Computation. Interpolation
Cubic Splines Cubic Splines
While data of a particular size presents many options for the order of spline functions, cubic splines are preferred because they provide the simplest representation that exhibits the desired appearance of smoothness.
In general, the ith spline function for a cubic spline can be written as:
For n data points, there are n-1 intervals and thus 4(n-1) unknowns to evaluate to solve all the spline function coefficients.There is no ‘one equation’ that can represent the whole spline function on the domain
si x( )= ai + bi x − xi( )+ ci x − xi( )2 + di x − xi( )3
ES 240: Scientific and Engineering Computation. Interpolation
Piecewise Interpolation in MATLABPiecewise Interpolation in MATLAB
MATLAB has several built-in functions to implement piecewise interpolation. The first is spline:
yy=spline(x, y, xx)
This performs cubic spline interpolation

ES 240: Scientific and Engineering Computation. Interpolation
ExampleExample
Generate data:x = linspace(-1, 1, 9);y = 1./(1+25*x.̂ 2);
Calculate 100 model points anddetermine not-a-knot interpolationxx = linspace(-1, 1);yy = spline(x, y, xx);
Calculate actual function values at model points and data points, the 9-point (solid), and the actual function (dashed), yr = 1./(1+25*xx.̂ 2)plot(x, y, ‘o’, xx, yy, ‘-’, xx, yr, ‘--’)
ES 240: Scientific and Engineering Computation. Interpolation
MATLABMATLAB’’s s interp1interp1
FunctionFunction
While spline can only perform cubic splines, MATLAB’s interp1 function can perform several different kinds of interpolation:yi = interp1(x, y, xi, ‘method’)–
x
& y
contain the original data–
xi
contains the points at which to interpolate–
‘method’
is a string containing the desired method:•
‘nearest’- nearest neighbor interpolation•
‘linear’
- connects the points with straight lines•
‘spline’
- not-a-knot cubic spline interpolation•
‘pchip’
or ‘cubic’
- piecewise cubic Hermite interpolation
ES 240: Scientific and Engineering Computation. Interpolation
LabLab
15.9


















