Erik Nielsen Interna onal Airport Obstacle Limita on ... · proved to be an improved method for...
1
Background Whitehorse Erik Nielsen InternaƟonal Airport is a cerƟfied aerodrome (i.e., airport) owned and operated by Yukon Government. They are required “to maintain and operate the site in accordance with applicable Transport Canada standards listed in Transport Canada’s TP 312— Aerodrome Standards and Recommended PracƟces” periodically. The internaƟonal airport serves a wide array of aircraŌ types on 3 runways, (14R‐32L, 01‐19 and 14L‐32R), which are surrounded by nearby forested areas, power poles, buildings, fences and steep terrain (Figure 1). Erik Nielsen Interna Ɵonal Airport Obstacle Limita Ɵon Surfaces Survey Whitehorse, Yukon ERIC BARDIN MSc GeomaƟcs and G.C. (CARL) FRIESEN CLS, BCLS, PEng, FEC Underhill GeomaƟcs Ltd. 4081 4th Avenue, Whitehorse, Yukon Y1A 1H3 (867) 668‐2048 Challenge IdenƟfying all obstacles encroaching and their degree of protrusion within the diff erent Obstacle LimitaƟon Surfaces (OLS) of Whitehorse InternaƟonal Airport runways. IntroducƟon The OLS and Airport Zoning RegulaƟons (AZR) surfaces are a series of surfaces that define the limits in which objects may project into the airspace. There are 11 diff erent plans to create, all requiring the same amount of OLS‐AZR surveys to be executed with each one having diff erent specificaƟons (e.g. take‐off/approach slopes and length, strip width). All individual obstacles and obstacle areas extent within the perimeter of all surfaces needed to be idenƟfied. The Government of Yukon AviaƟon Branch approved our proposal of using current exisƟng LIDAR data to locate and measure the intrusion height of obstacles due to the extent and cost of field surveys and the limitaƟons of convenƟonal survey (total staƟon) to see beyond an obstacle. In 2015‐2016, Underhill GeomaƟcs Ltd. (UGL) was contracted to update the plans and survey the OLS for the cerƟficaƟon part as well as the surfaces defined in the AZR using available LIDAR data. LIDAR is a remote sensing method that enables scruƟnizaƟon of the terrain below the OLS‐AZR surfaces, (at sub‐meter level of accuracy), while also giving an accurate coordinated posiƟon of a potenƟal obstacle. Orthophotos of the area were used to determine the nature of the obstacles and some field work was executed for ground truthing and verificaƟon purposes. DescripƟon of work Conclusion The bulk of the analysis work was performed using two soŌware: VRMesh (3D point cloud and mesh processing) and Civil 3D (AutoCAD). The first one allowed us to visually compare the LIDAR data above OLS‐AZR surfaces in 3D and extract only clusters of point clouds around obstacles (Figure 2). This step dramaƟcally reduced the size of the files to deal with the subsequent steps of the project. Figure 2: LIDAR points showed above the designed OLS‐AZR surface. Note the top of roofs in the foreground (A), lamp poles (B) and trees (C). A B C C The second soŌware was able to handle the rest of the work by creaƟng surfaces from extracted VRMesh LIDAR data. By idenƟfying and outlining where LIDAR derived surfaces intersected our designed OLS‐AZR surfaces with an automated process that creates a 3D polyline; it gave us the extent of almost all obstacles we would have to report on the face of the plans. A meƟculous recogniƟon and verificaƟon of type of the obstacles was accomplished with the help of orthophotos and limited field work, while the coordinates and heights were corroborated in the office and field. AddiƟonally, a volume was created between the LIDAR and the OLS‐AZR surfaces combined with a range interval elevaƟon gradient analysis, (Figure 3), to precisely idenƟfy the degree of protrusion of a mulƟple obstacle area, the locaƟon for a single obstacle, and the highest elevaƟon(s) of obstacle(s) within a 3D polyline (Figure 4). PosiƟons, elevaƟons, magnitude of encroachments and nature of the obstacles were then ready to be published on their respecƟve plans. Figure 3 : Plan view of 3d polylines created by intersecƟng the LIDAR surfaces and the designed OLS‐AZR surfaces. Figure 4: ElevaƟon analysis comparing the LIDAR data and the OLS‐AZR surface for fast detecƟon of the highest obstacles protrusions. Despite not registering some finer features such as poles and fences, the LIDAR data proved to be an improved method for execuƟng an Obstacle LimitaƟon Surfaces survey and for covering such terrain extent and complexity compared to convenƟonal survey. Furthermore, LIDAR data off ers an efficient, accurate and cost‐eff ecƟve method for idenƟfying obstacle encroachments. Figure 1: Erik Nielsen InternaƟonal Airport aerial view showing an example of run‐ way 14L‐32R (blue) and 01‐19 (red) OLS surfaces. Both surfaces have different specificaƟons pertaining to the type of aircraŌ they can accommodate.
-
Upload
trinhthuan -
Category
Documents
-
view
216 -
download
0
Transcript of Erik Nielsen Interna onal Airport Obstacle Limita on ... · proved to be an improved method for...
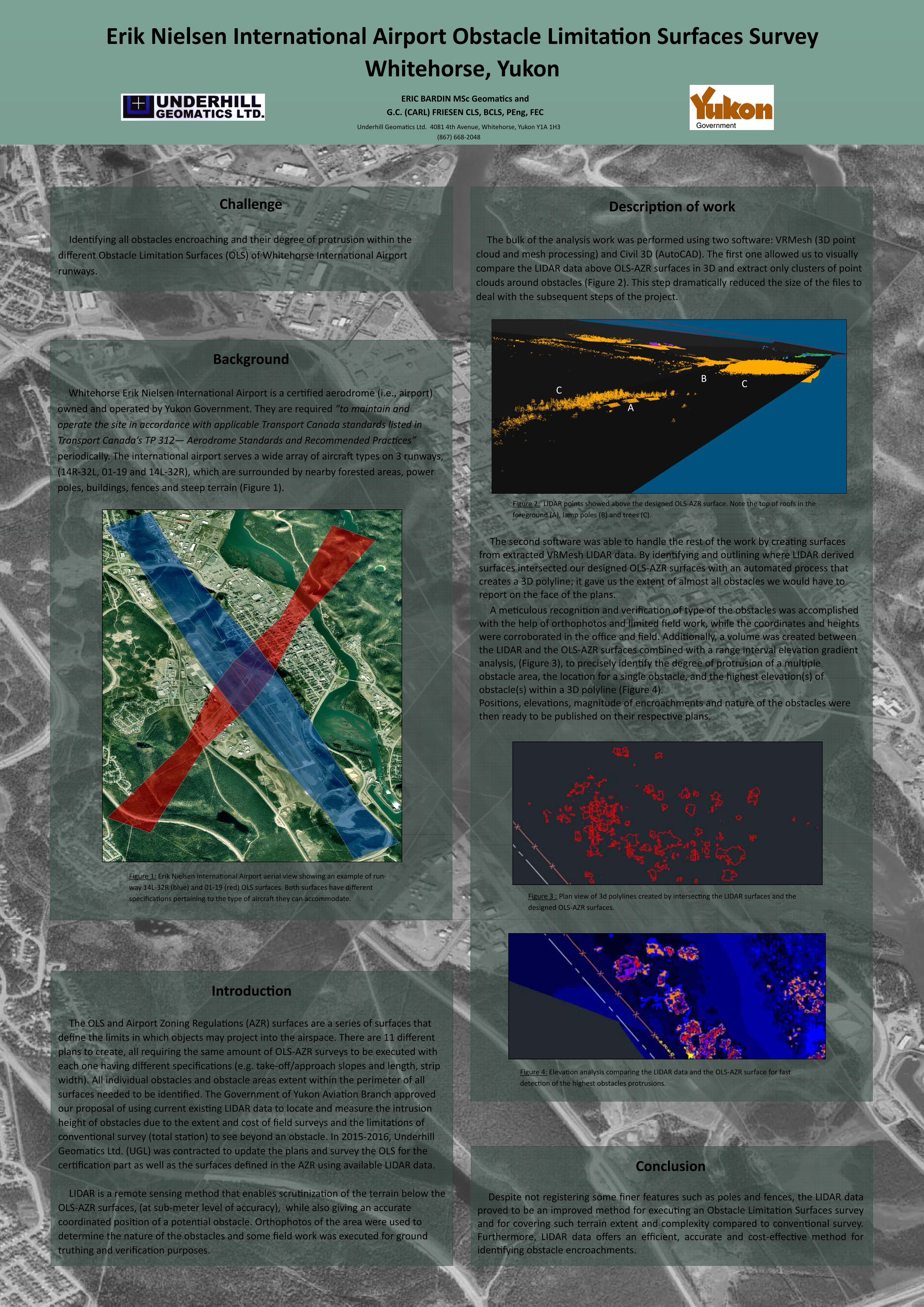
Background
Whitehorse Erik Nielsen Interna onal Airport is a cer fied aerodrome (i.e., airport)
owned and operated by Yukon Government. They are required “to maintain and
operate the site in accordance with applicable Transport Canada standards listed in
Transport Canada’s TP 312— Aerodrome Standards and Recommended Prac ces”
periodically. The interna onal airport serves a wide array of aircra types on 3 runways,
(14R‐32L, 01‐19 and 14L‐32R), which are surrounded by nearby forested areas, power
poles, buildings, fences and steep terrain (Figure 1).
Erik Nielsen Interna onal Airport Obstacle Limita on Surfaces Survey
Whitehorse, Yukon ERIC BARDIN MSc Geoma cs and
G.C. (CARL) FRIESEN CLS, BCLS, PEng, FEC
Underhill Geoma cs Ltd. 4081 4th Avenue, Whitehorse, Yukon Y1A 1H3
(867) 668‐2048
Challenge
Iden fying all obstacles encroaching and their degree of protrusion within the
different Obstacle Limita on Surfaces (OLS) of Whitehorse Interna onal Airport
runways.
Introduc on
The OLS and Airport Zoning Regula ons (AZR) surfaces are a series of surfaces that
define the limits in which objects may project into the airspace. There are 11 different
plans to create, all requiring the same amount of OLS‐AZR surveys to be executed with
each one having different specifica ons (e.g. take‐off/approach slopes and length, strip
width). All individual obstacles and obstacle areas extent within the perimeter of all
surfaces needed to be iden fied. The Government of Yukon Avia on Branch approved
our proposal of using current exis ng LIDAR data to locate and measure the intrusion
height of obstacles due to the extent and cost of field surveys and the limita ons of
conven onal survey (total sta on) to see beyond an obstacle. In 2015‐2016, Underhill
Geoma cs Ltd. (UGL) was contracted to update the plans and survey the OLS for the
cer fica on part as well as the surfaces defined in the AZR using available LIDAR data.
LIDAR is a remote sensing method that enables scru niza on of the terrain below the
OLS‐AZR surfaces, (at sub‐meter level of accuracy), while also giving an accurate
coordinated posi on of a poten al obstacle. Orthophotos of the area were used to
determine the nature of the obstacles and some field work was executed for ground
truthing and verifica on purposes.
Descrip on of work
Conclusion
The bulk of the analysis work was performed using two so ware: VRMesh (3D point
cloud and mesh processing) and Civil 3D (AutoCAD). The first one allowed us to visually
compare the LIDAR data above OLS‐AZR surfaces in 3D and extract only clusters of point
clouds around obstacles (Figure 2). This step drama cally reduced the size of the files to
deal with the subsequent steps of the project.
Figure 2: LIDAR points showed above the designed OLS‐AZR surface. Note the top of roofs in the
foreground (A), lamp poles (B) and trees (C).
A
B C
C
The second so ware was able to handle the rest of the work by crea ng surfaces from extracted VRMesh LIDAR data. By iden fying and outlining where LIDAR derived surfaces intersected our designed OLS‐AZR surfaces with an automated process that creates a 3D polyline; it gave us the extent of almost all obstacles we would have to report on the face of the plans.
A me culous recogni on and verifica on of type of the obstacles was accomplished with the help of orthophotos and limited field work, while the coordinates and heights were corroborated in the office and field. Addi onally, a volume was created between the LIDAR and the OLS‐AZR surfaces combined with a range interval eleva on gradient analysis, (Figure 3), to precisely iden fy the degree of protrusion of a mul ple obstacle area, the loca on for a single obstacle, and the highest eleva on(s) of obstacle(s) within a 3D polyline (Figure 4). Posi ons, eleva ons, magnitude of encroachments and nature of the obstacles were then ready to be published on their respec ve plans.
Figure 3 : Plan view of 3d polylines created by intersec ng the LIDAR surfaces and the
designed OLS‐AZR surfaces.
Figure 4: Eleva on analysis comparing the LIDAR data and the OLS‐AZR surface for fast
detec on of the highest obstacles protrusions.
Despite not registering some finer features such as poles and fences, the LIDAR data proved to be an improved method for execu ng an Obstacle Limita on Surfaces survey and for covering such terrain extent and complexity compared to conven onal survey. Furthermore, LIDAR data offers an efficient, accurate and cost‐effec ve method for iden fying obstacle encroachments.
Figure 1: Erik Nielsen Interna onal Airport aerial view showing an example of run‐
way 14L‐32R (blue) and 01‐19 (red) OLS surfaces. Both surfaces have different
specifica ons pertaining to the type of aircra they can accommodate.