Enhancing Human Synchronization through Embodied Digital ...
23
Enhancing Human Synchronization through Embodied Digital Architectures: From basic science to innovation Benoît G. Bardy EuroMov Montpellier University, France www.euromov.eu EuroMov
Transcript of Enhancing Human Synchronization through Embodied Digital ...

Enhancing Human Synchronization throughEmbodied Digital Architectures:
From basic science to innovationBenoît G. Bardy
EuroMovMontpellier University, France
www.euromov.eu
EuroMov

Between agentsHuman – agent interactions and mental health
(Bardy et al., 2014; Slovinski et al., 2016)
Between music and behaviorMusic-induced synchronisation of
biological rhythms(Bardy et al., 2015; Dotov et al., 2019)
Between the sensesSpecification across energy arrays
(Mantel et al., 2015)
Sync
Project FP7-ICT-2013-10-610633
BeatHealth “Health and Wellness on the Beat”
Collaborative Project Personalised health, active ageing and independent living
Deliverable D4.5 “Final report on cloud services in Task 4.4”
Due date of deliverable: 2016/03/31
Actual submission date: 2016/03/30
Starting date of the project: October 1st, 2013 Duration: 36 months
Lead contractor: UM Revision: 0.0
Dissemination Level
PU Public PP Restricted to other programme participants (including the Commission services) RE Restricted to a group specified by the consortium (including the Commission services) CO Confidential, only for members of the consortium (including the Commission services) X
.
Energy-1
Energy-3
Energy-2
.
Energy-1
Energy-3
Energy-2
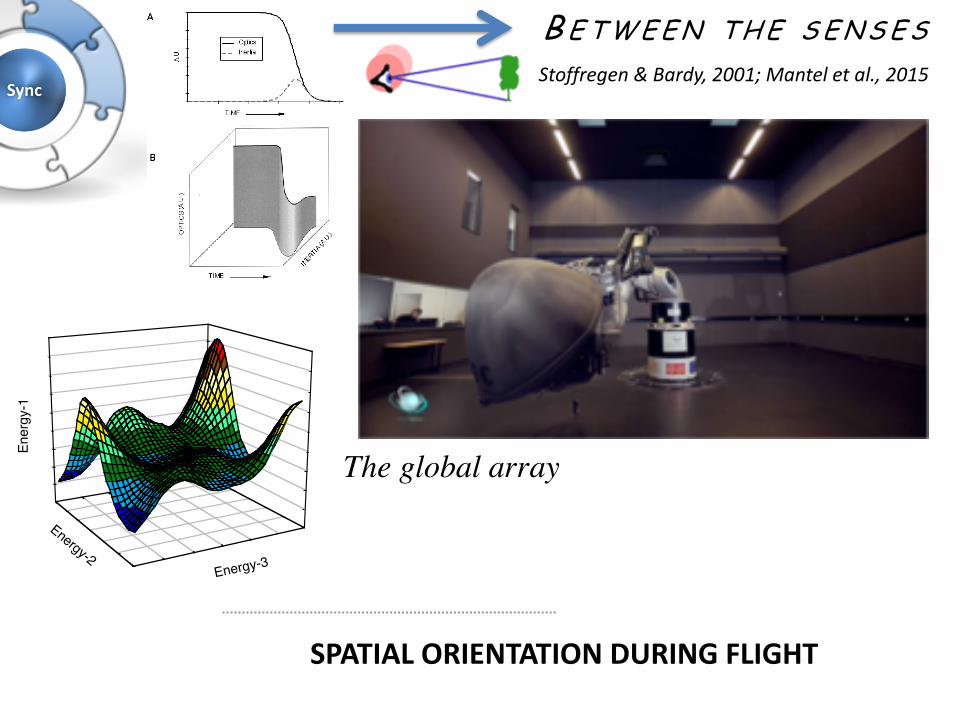
The global array
Sync
BETWEEN THE SENSESStoffregen & Bardy, 2001; Mantel et al., 2015
SPATIAL ORIENTATION DURING FLIGHT

CHALLENGES
q Modelling and testing the global array in
natural/specific situations
q Transport:
q Road: Cycling, biking, driving
q Air: Flying (Liners, Helicopters)
q Rail: Tram, train
q Motion sickness and see leg acquisition
q Walking dynamics
q Phobia, vertigo, disorientation
q Etc.
RESEARCH ARTICLE
Exploratory Movement Generates Higher-Order Information That Is Sufficient forAccurate Perception of Scaled EgocentricDistanceBruno Mantel1,2,3, Thomas A. Stoffregen4, Alain Campbell2,5, Benoît G. Bardy1,6*
1 Movement-to-Health Laboratory, EuroMov, Montpellier-1 University, Montpellier, France, 2 NormandieUniversité, Caen, France, 3 Centre d’Etudes Sport et Actions Motrices, Université de Caen Basse-Normandie, Caen, France, 4 Affordance Perception-Action Laboratory, University of Minnesota,Minneapolis, United States of America, 5 UMR 6139 Laboratoire de Mathématiques Nicolas Oresme,Université de Caen-Basse Normandie & CNRS, Caen, France, 6 Institut Universitaire de France, Paris,France
AbstractBody movement influences the structure of multiple forms of ambient energy, including op-tics and gravito-inertial force. Some researchers have argued that egocentric distance is de-rived from inferential integration of visual and non-visual stimulation. We suggest thataccurate information about egocentric distance exists in perceptual stimulation as higher-order patterns that extend across optics and inertia. We formalize a pattern that specifiesthe egocentric distance of a stationary object across higher-order relations between opticsand inertia. This higher-order parameter is created by self-generated movement of the per-ceiver in inertial space relative to the illuminated environment. For this reason, we placedminimal restrictions on the exploratory movements of our participants. We asked whetherhumans can detect and use the information available in this higher-order pattern. Partici-pants judged whether a virtual object was within reach. We manipulated relations betweenbody movement and the ambient structure of optics and inertia. Judgments were preciseand accurate when the higher-order optical-inertial parameter was available. When onlyoptic flow was available, judgments were poor. Our results reveal that participants per-ceived egocentric distance from the higher-order, optical-inertial consequences of their ownexploratory activity. Analysis of participants’movement trajectories revealed that self-selected movements were complex, and tended to optimize availability of the optical-inertialpattern that specifies egocentric distance. We argue that accurate information about ego-centric distance exists in higher-order patterns of ambient energy, that self-generatedmovement can generate these higher-order patterns, and that these patterns can be de-tected and used to support perception of egocentric distance that is precise and accurate.
PLOS ONE | DOI:10.1371/journal.pone.0120025 April 9, 2015 1 / 26
OPEN ACCESS
Citation: Mantel B, Stoffregen TA, Campbell A,Bardy BG (2015) Exploratory Movement GeneratesHigher-Order Information That Is Sufficient forAccurate Perception of Scaled Egocentric Distance.PLoS ONE 10(4): e0120025. doi:10.1371/journal.pone.0120025
Academic Editor: Suliann Ben Hamed, Centre deNeuroscience Cognitive, FRANCE
Received: August 5, 2014
Accepted: January 19, 2015
Published: April 9, 2015
Copyright: © 2015 Mantel et al. This is an openaccess article distributed under the terms of theCreative Commons Attribution License, which permitsunrestricted use, distribution, and reproduction in anymedium, provided the original author and source arecredited.
Data Availability Statement: All relevant data arewithin the paper and its Supporting Information files.
Funding: This research was funded by ENACTIVE,a network of Excellence of the European Union (FP6-IST-022114). The funders had no role in studydesign, data collection and analysis, decision topublish, or preparation of the manuscript.
Competing Interests: The authors have declaredthat no competing interests exist.
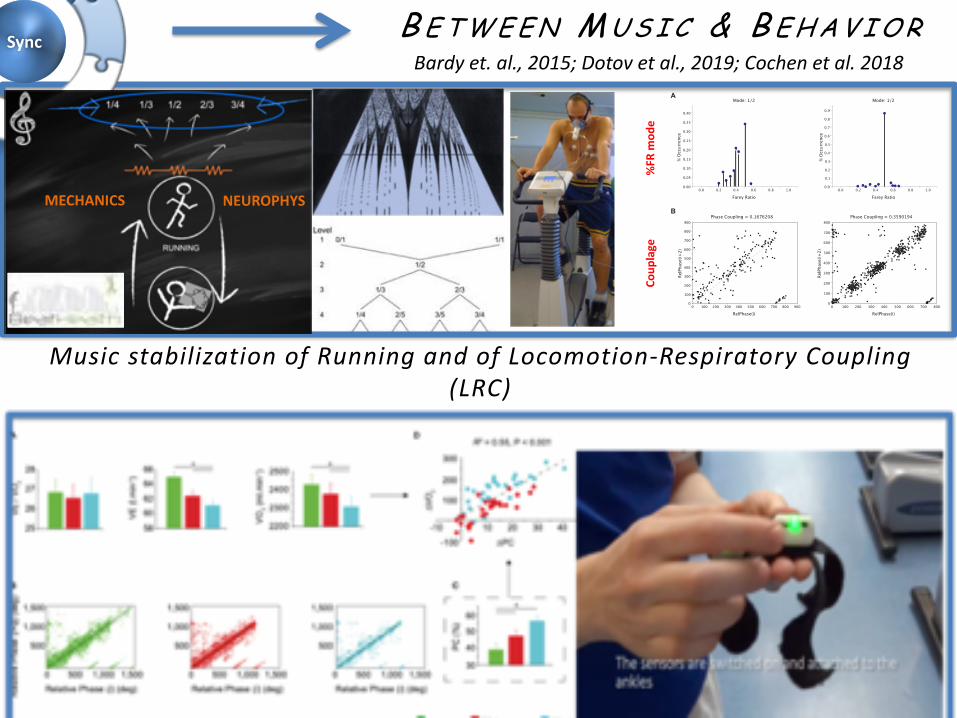
B E T W E E N M U S I C & B E H A V I O RBardy et. al., 2015; Dotov et al., 2019; Cochen et al. 2018
Sound stabilizes moving and breathing Bardy et al.
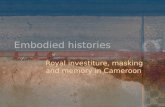
Figure 1. Farey tree and Arnold tongues, two representations of synchronization regions when biological rhythms are coupled. (A)Five first levels of the Farey tree, a hierarchical mathematical structure representing the different frequency ratios of any rhythmicsystems coupled together, such as running and breathing, according to their relative stability. Upper-level frequency ratios (e.g.,1:2) are more stable than lower-level ratios (e.g., 3:8); (B) Arnold tongues. Specific mode-locking patterns occur according to thecoupling strength (K) and the detuning between the two oscillators (bare winding number). Darker regions correspond to morestable behaviors. Taken from Ref. 31.
specific instructions to cycle or breathe in synchronywith the regular metronome when sound was on(sessions 3 and 4). The main relevant dependentvariables included the modal value of the LRC fre-quency ratio (FRmode), the phase-coupling index(PC), expressing strength of the coupling betweenthe two systems, and the energy efficiency expressedby VO2. A stabilizing effect of sound on respirationand locomotion was expected in the form of an inc-rease in the occurrence of FRmode, an increase inPC, accompanied by a decrease in VO2. Statisticalsignificance was tested using an analysis of variance(ANOVA, P < 0.05). The results confirmed ourpredictions. When participants were instructed tobreathe or cycle in synchrony with a sound, FRmodeincreased from 55% to 70%, and PC increased from11% to 14%. These changes were accompanied by asmall but significant decrease in VO2, from 2.36 to2.32 L/minute. Interestingly, the effect of sound onLRC happened to depend on the initial LRC stabil-ity. Sound stabilized (Fig. 2, left) an initially unstableLRC, while it destabilized (Fig. 2, right) an initiallystable LRC. This relation between initial LRC stabil-ity and sound-induced (de)stabilization was furtherquantified by a negative linear correlation (mean racross conditions = −0.75) between FRmode in thesound-off condition and the difference in FRmodebetween both sound conditions (sound-on andsound-off).
Sound-induced (de)stabilization of LRC at anunpreferred frequencyFollowing this first study, we more recently exam-ined whether the stabilizing effect of a metronomesound is dependent on the rhythm frequency (ortempo) of the presented stimuli. On the basis ofresults on bimanual coordination and our own re-sults described earlier, we hypothesized that thestabilizing effect of a metronome sound would bemaintained at rhythm frequencies far off the pref-erential respiratory or cycling rhythm frequency(i.e., above and below) compared to silence. Inthis ongoing work,32 participants (N = 15) againcycled or breathed in synchrony with the exter-nal metronome. This time, however, the imposedmetronome tempo frequency was −15% (i.e., slowcondition), 0% (i.e., preferential condition), or+15% (i.e., fast condition) of the natural cyclingfrequency, or −10%, 0%, and +10% of the naturalbreathing frequency. In general, the results of thissecond study were in line with the predictions. Par-ticipants were found to increase FRmode (from 41%to 68%) with sound, again providing evidence thatperiodic auditory stimulation is an efficient way tostabilize the coordination between locomotion andrespiration. In addition, the most stable LRC (evi-denced by phase-coupling and frequency-couplingindexes) occurred at a preferred frequency, withan increase in variability occurring below or above
96 Ann. N.Y. Acad. Sci. 1337 (2015) 94–100 C⃝ 2015 New York Academy of Sciences.
Music stabilization of Running and of Locomotion-Respiratory Coupling (LRC)
Sync
Figure 4. LRC variables for two representative participants in the FREE session. The left three panels correspond to S05 and the right threepanels correspond to S15. The first two panels (A. Frequency Ratios Distribution) represent the distribution of the frequency ratios. The next twopanels (B. Return Maps) represent the dispersion of the relative phase in the return map. The last two panels (C. Relative Phases) represent the relativephase values during five consecutive minutes where red dots represent the relative phase values for the modal frequency ratio and black dotsrepresent the relative phase values for the other expressed frequency ratios.doi:10.1371/journal.pone.0045206.g004
Sound, Energy and Locomotor-Respiratory Coupling
PLOS ONE | www.plosone.org 7 September 2012 | Volume 7 | Issue 9 | e45206
Hoffmann et al., 2012; Hoffmann & Bardy, 2015
Phase&rela)v
e Co
uplage
%FR
&mod
e
MECHANICS NEUROPHYS
Project FP7-ICT-2013-10-610633
BeatHealth “Health and Wellness on the Beat”
Collaborative Project Personalised health, active ageing and independent living
Deliverable D4.5 “Final report on cloud services in Task 4.4”
Due date of deliverable: 2016/03/31
Actual submission date: 2016/03/30
Starting date of the project: October 1st, 2013 Duration: 36 months
Lead contractor: UM Revision: 0.0
Dissemination Level
PU Public PP Restricted to other programme participants (including the Commission services) RE Restricted to a group specified by the consortium (including the Commission services) CO Confidential, only for members of the consortium (including the Commission services) X
Project FP7-ICT-2013-10-610633
BeatHealth “Health and Wellness on the Beat”
Collaborative Project Personalised health, active ageing and independent living
Deliverable D4.5 “Final report on cloud services in Task 4.4”
Due date of deliverable: 2016/03/31
Actual submission date: 2016/03/30
Starting date of the project: October 1st, 2013 Duration: 36 months
Lead contractor: UM Revision: 0.0
Dissemination Level
PU Public PP Restricted to other programme participants (including the Commission services) RE Restricted to a group specified by the consortium (including the Commission services) CO Confidential, only for members of the consortium (including the Commission services) X
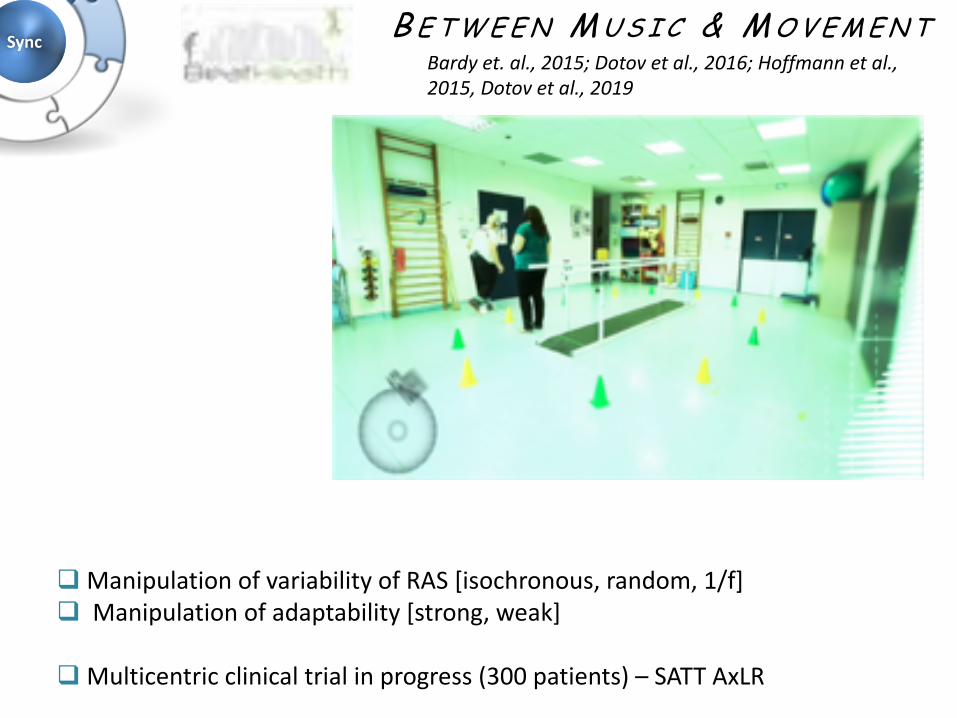
B E T W E E N M U S I C & M O V E M E N TBardy et. al., 2015; Dotov et al., 2016; Hoffmann et al., 2015, Dotov et al., 2019
Sync
q Manipulation of variability of RAS [isochronous, random, 1/f]q Manipulation of adaptability [strong, weak]
q Multicentric clinical trial in progress (300 patients) – SATT AxLR
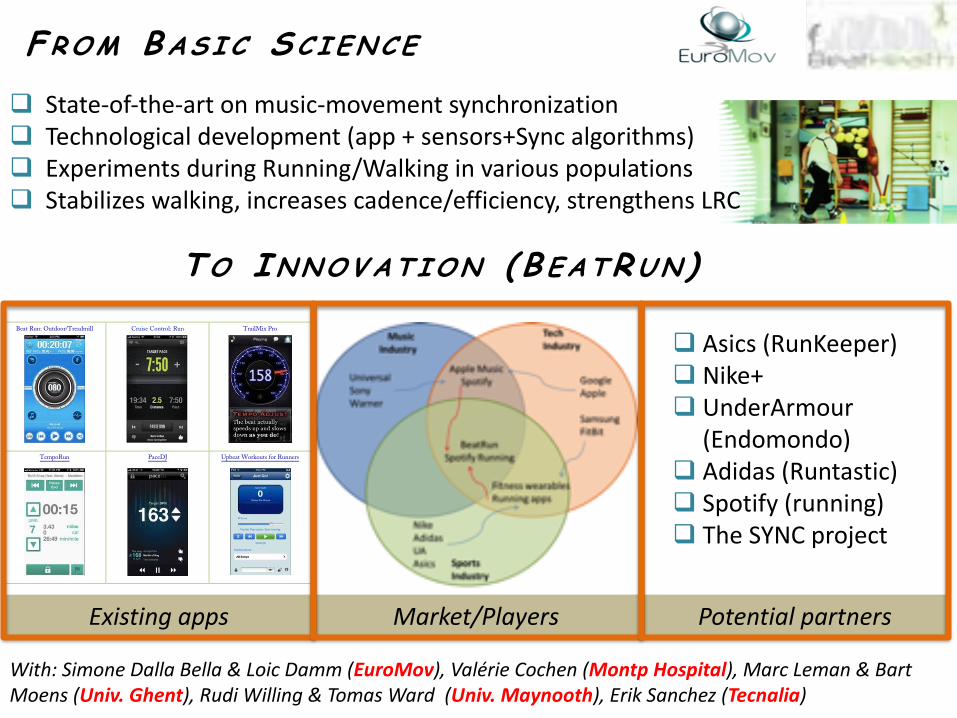
F ROM BASIC S CIENCE
Project FP7-ICT-2013-10-610633
BeatHealth “Health and Wellness on the Beat”
Collaborative Project Personalised health, active ageing and independent living
Deliverable D4.5 “Final report on cloud services in Task 4.4”
Due date of deliverable: 2016/03/31
Actual submission date: 2016/03/30
Starting date of the project: October 1st, 2013 Duration: 36 months
Lead contractor: UM Revision: 0.0
Dissemination Level
PU Public PP Restricted to other programme participants (including the Commission services) RE Restricted to a group specified by the consortium (including the Commission services) CO Confidential, only for members of the consortium (including the Commission services) X
q State-of-the-art on music-movement synchronizationq Technological development (app + sensors+Sync algorithms)q Experiments during Running/Walking in various populationsq Stabilizes walking, increases cadence/efficiency, strengthens LRC
With: Simone Dalla Bella & Loic Damm (EuroMov), Valérie Cochen (Montp Hospital), Marc Leman & Bart Moens (Univ. Ghent), Rudi Willing & Tomas Ward (Univ. Maynooth), Erik Sanchez (Tecnalia)
Existing apps
TO INNOVATION (B EATRUN)Beat Run: Outdoor/Treadmill Cruise Control: Run TrailMix Pro
TempoRun PaceDJ Upbeat Workouts for Runners
!
Market/Players Potential partners
q Asics (RunKeeper)q Nike+q UnderArmour
(Endomondo)q Adidas (Runtastic)q Spotify (running)q The SYNC project
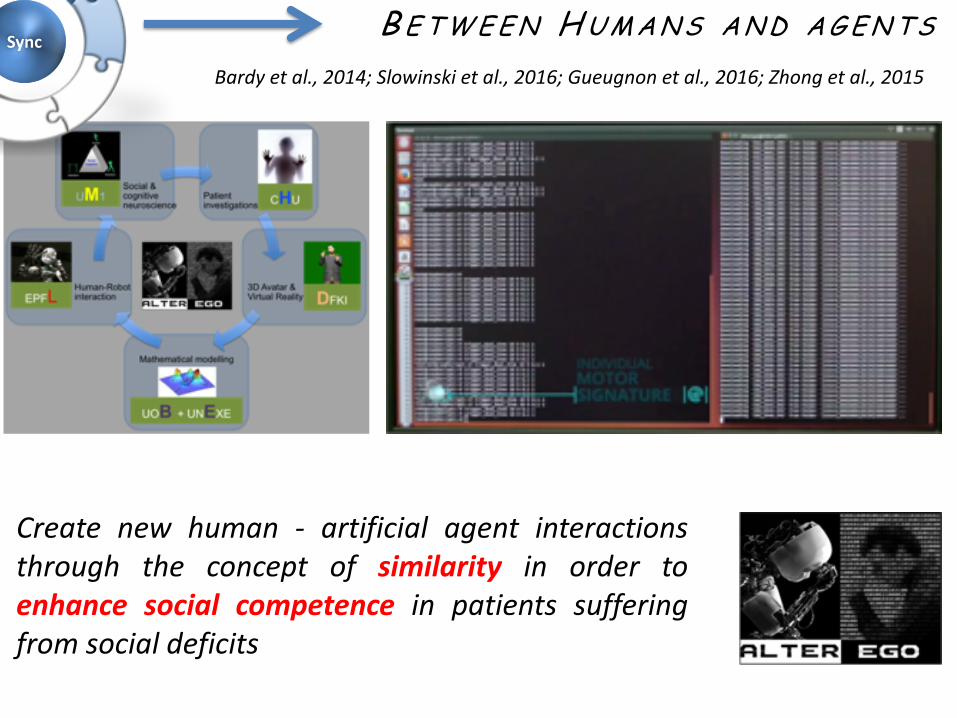
BETWEEN HUMANS AND AGENTS
Bardy et al., 2014; Slowinski et al., 2016; Gueugnon et al., 2016; Zhong et al., 2015
Create new human - artificial agent interactionsthrough the concept of similarity in order toenhance social competence in patients sufferingfrom social deficits
Sync

Similarity, Entrainment, Synchronization, and Affiliation
q Similarity increases synchronization
q Synchronization increases cooperation

Similarity and Synchronization
- In physics -> two systems possessing the same frequency tend to synchronize better (Huygens, 1666)
- In physiology -> two biological systems possessing the same intrinsic properties tend to synchronize (von Holst, 1939, Bramble & Carrier, 2003)
- In motor control-> two individuals coordinate better when they exchange more similar information (Schmidt & Richardson, 2008; Varlet et al., 2012)
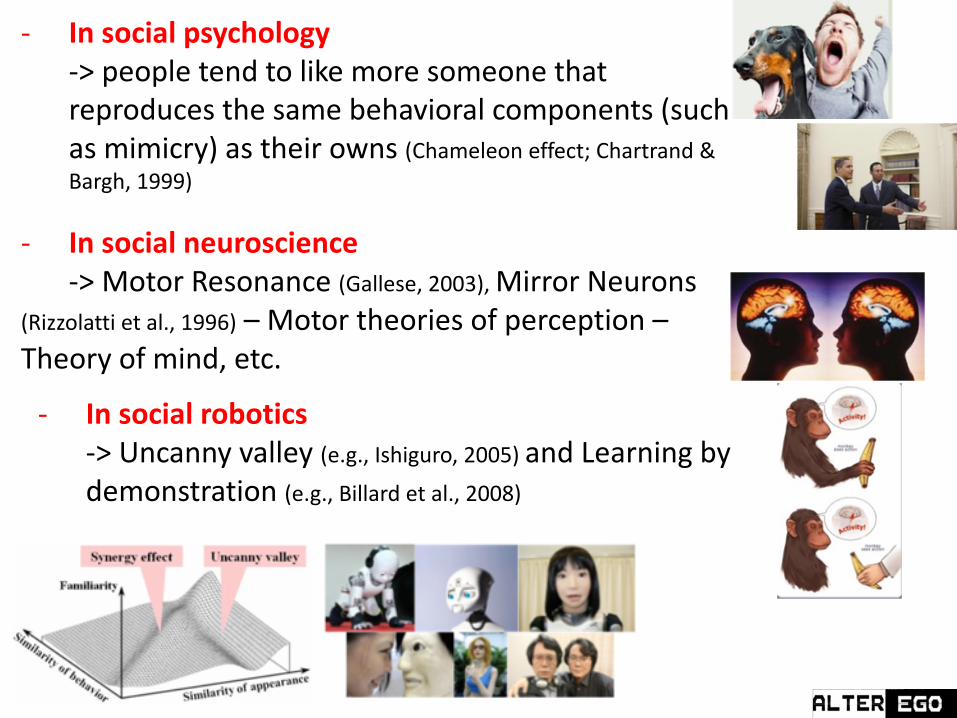
- In social psychology-> people tend to like more someone that reproduces the same behavioral components (such as mimicry) as their owns (Chameleon effect; Chartrand & Bargh, 1999)
- In social neuroscience-> Motor Resonance (Gallese, 2003), Mirror Neurons
(Rizzolatti et al., 1996) – Motor theories of perception –Theory of mind, etc.
- In social robotics-> Uncanny valley (e.g., Ishiguro, 2005) and Learning by demonstration (e.g., Billard et al., 2008)
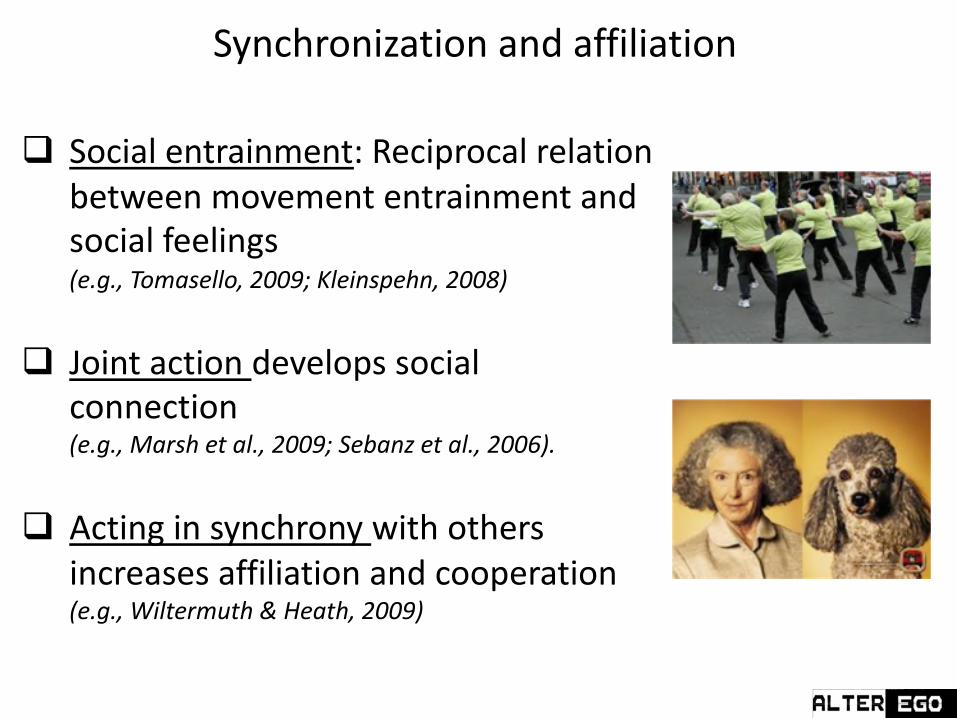
Synchronization and affiliation
q Social entrainment: Reciprocal relation between movement entrainment and social feelings(e.g., Tomasello, 2009; Kleinspehn, 2008)
q Joint action develops social connection(e.g., Marsh et al., 2009; Sebanz et al., 2006).
q Acting in synchrony with others increases affiliation and cooperation (e.g., Wiltermuth & Heath, 2009)

From Similarity…
Morphological
Behavioural
Temporal
To Difference !q Similarity triggers social interactionq A bridge toward interacting with others

Evaluating similarity in a social perceptuo-coordination context
Between humans, humans and artificial agentsManipulation of several parameters, mental, social, physical, etc.
terms of amplitude from the movement he/she had to look at (i.e., the movement of the second participant), leading to anasymmetry between hand movements and eyes movements for each participant. This asymmetry induced a reduction ofsynchronization between participants (Varlet et al., 2012). In this latter study, they manipulated the movement amplitudeof stimuli during an unintended interpersonal coordination in which each participant was instructed to look at the stimuluswhile performing oscillations with a pendulum at their natural frequency. They observed that the stimulus amplitude influ-enced synchronization and concluded that the difference of amplitude between hand and eyes movements reducedsynchronization.
Movement richness was manipulated through the amount of frequency values contained in the movement in order to notinfluence similarity in amplitude. Therefore, movement richness was manipulated by asking participants to produce eitherone natural oscillation (Simple group) or to produce two nested-frequency movements (Rich group). We asked participantsof the Rich group to perform a double oscillation superimposing a faster frequency component onto their natural oscillation.We assumed that (1) multi-frequency movements are richer than mono-frequency movements in term of amount of ‘‘sub-movements” (i.e., two different oscillations for the Rich group) and that (2) performing a double oscillation provides a largerrepertoire of movements than performing only one oscillation.
Each dyad was randomly attributed to one of the four groups, resulting from the combination of synchronization andrichness. Fig. 2 illustrates the four conditions.
During these exposure sessions, participants were asked to perform the requested movements at their own preferred fre-quency while looking at the other participant’s movement. The first exposure (step 2) included three 1-mn trials and thesecond exposure (step 4) included seven 1-mn trials.
2.3.2. Test sessions: the mirror game taskIn order to measure the improvement of improvisation competences, three sessions using the mirror game were
performed by our dyads. During the first (Pre-test), third (Intermediary-test) and fifth (Post-test) steps, participantsperformed a mirror game task resembling the one used by Noy et al. (2011). They were instructed to ‘‘create interesting,complex and various movements and stay as coordinated as possible” by moving the handle they were holding along thestring. In order to observe the enhancement of improvisation in novice groups, two conditions of improvisation were used(Noy et al., 2011). In the Leader/Follower condition (LF) one participant, designated as the leader, was improvising,whereas the second participant followed the leader; in the Joint Improvisation condition (JI), no follower or leader wasdesignated. Altogether, each participant of the dyad performed two trials as Leader, two trials as Follower, and two trialsof Joint Improvisation, in each of the test sessions (Pre-test, Intermediary-test, Post-test). The order of conditions wascounterbalanced across dyads but remained identical for the three steps. After several pretest experiments, we selecteda duration of 45 s for each trial, with 45 s at rest in order to maintain the motivation of the participants during the entireexperiment.
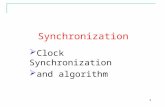
Fig. 1. Set-up of the protocol, showing two participants engaged in a one-dimensional perceptuo-motor task consisting of sliding a hand-held handle alonga string (a.k.a. mirror game). Maximal movement amplitude is 1.80 m. The ‘‘Make Human” model is part of the open source modeling tool ‘‘MakeHuman”(www.makehuman.org). Blender 2.72b was used to create the environmental set-up.
120 M. Gueugnon et al. / Human Movement Science 46 (2016) 117–128
The mirror game task (e.g. Noy et al., 2011)

Manipulating Morphology(Physical resemblance)
terms of amplitude from the movement he/she had to look at (i.e., the movement of the second participant), leading to anasymmetry between hand movements and eyes movements for each participant. This asymmetry induced a reduction ofsynchronization between participants (Varlet et al., 2012). In this latter study, they manipulated the movement amplitudeof stimuli during an unintended interpersonal coordination in which each participant was instructed to look at the stimuluswhile performing oscillations with a pendulum at their natural frequency. They observed that the stimulus amplitude influ-enced synchronization and concluded that the difference of amplitude between hand and eyes movements reducedsynchronization.
Movement richness was manipulated through the amount of frequency values contained in the movement in order to notinfluence similarity in amplitude. Therefore, movement richness was manipulated by asking participants to produce eitherone natural oscillation (Simple group) or to produce two nested-frequency movements (Rich group). We asked participantsof the Rich group to perform a double oscillation superimposing a faster frequency component onto their natural oscillation.We assumed that (1) multi-frequency movements are richer than mono-frequency movements in term of amount of ‘‘sub-movements” (i.e., two different oscillations for the Rich group) and that (2) performing a double oscillation provides a largerrepertoire of movements than performing only one oscillation.
Each dyad was randomly attributed to one of the four groups, resulting from the combination of synchronization andrichness. Fig. 2 illustrates the four conditions.
During these exposure sessions, participants were asked to perform the requested movements at their own preferred fre-quency while looking at the other participant’s movement. The first exposure (step 2) included three 1-mn trials and thesecond exposure (step 4) included seven 1-mn trials.
2.3.2. Test sessions: the mirror game taskIn order to measure the improvement of improvisation competences, three sessions using the mirror game were
performed by our dyads. During the first (Pre-test), third (Intermediary-test) and fifth (Post-test) steps, participantsperformed a mirror game task resembling the one used by Noy et al. (2011). They were instructed to ‘‘create interesting,complex and various movements and stay as coordinated as possible” by moving the handle they were holding along thestring. In order to observe the enhancement of improvisation in novice groups, two conditions of improvisation were used(Noy et al., 2011). In the Leader/Follower condition (LF) one participant, designated as the leader, was improvising,whereas the second participant followed the leader; in the Joint Improvisation condition (JI), no follower or leader wasdesignated. Altogether, each participant of the dyad performed two trials as Leader, two trials as Follower, and two trialsof Joint Improvisation, in each of the test sessions (Pre-test, Intermediary-test, Post-test). The order of conditions wascounterbalanced across dyads but remained identical for the three steps. After several pretest experiments, we selecteda duration of 45 s for each trial, with 45 s at rest in order to maintain the motivation of the participants during the entireexperiment.
Fig. 1. Set-up of the protocol, showing two participants engaged in a one-dimensional perceptuo-motor task consisting of sliding a hand-held handle alonga string (a.k.a. mirror game). Maximal movement amplitude is 1.80 m. The ‘‘Make Human” model is part of the open source modeling tool ‘‘MakeHuman”(www.makehuman.org). Blender 2.72b was used to create the environmental set-up.
120 M. Gueugnon et al. / Human Movement Science 46 (2016) 117–128
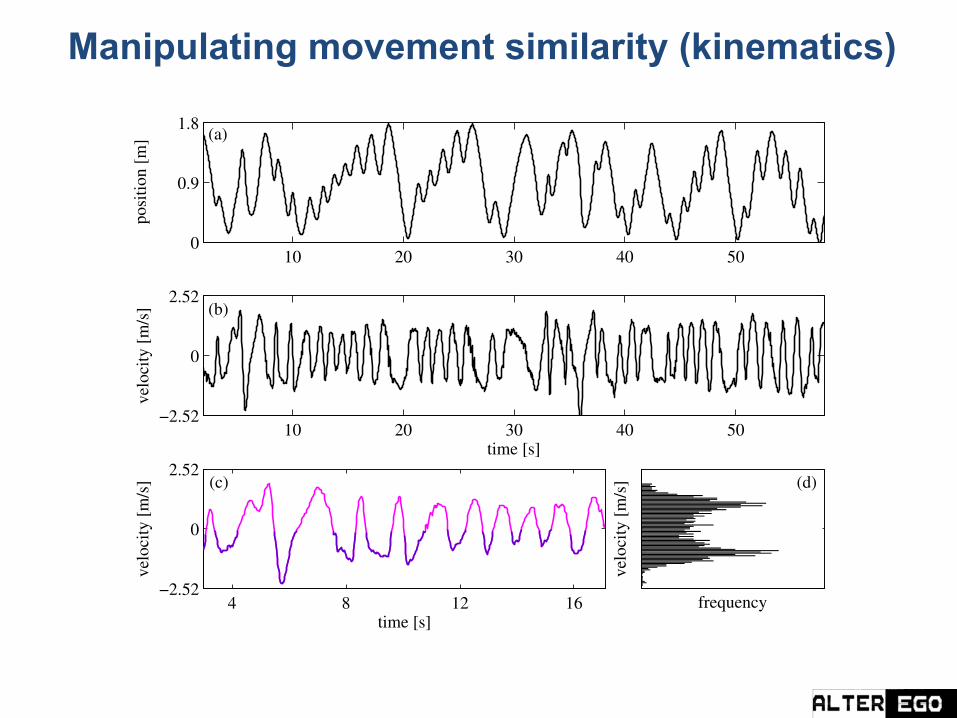
Manipulating movement similarity (kinematics)i
i“dynamic˙characteristics˙of˙motion˙PNAS˙v3” — 2015/5/26 — 20:18 — page 9 — #9 i
i
ii
ii
10 20 30 40 500
0.9
1.8posi
tion [
m] (a)
10 20 30 40 50−2.52
0
2.52
time [s]
vel
oci
ty [
m/s
] (b)
4 8 12 16−2.52
0
2.52
time [s]
vel
oci
ty [
m/s
] (c)
frequencyvel
oci
ty [
m/s
] (d)
Figure 4. (a) An example of solo position time series from the Experiment 3. (b) Velocity estimated from position data. (c) Fragment of the velocity time series withindicated, positive velocity segments (magenta) negative velocity segments (purple). (d) Velocity profile - histogram of the velocity time series.
conditions:
Positive definiteness: d(x1, x1) = 0, x1 6= x2 ) d(x1, x2) > 0,
Symmetry: d(x1, x2) = d(x2, x1),
Triangle inequality: d(x1, x2) d(x1, x3) + d(x2, x3).
Furthermore, it is non-parametric and quantifies partial matches. Hence, it allows to compare PDFs rather than their selectedmoments. This represents a significant advantage of our analysis in comparison to using selected moments, which are notsu�cient to uniquely parameterise a PDF. We note that a bounded PDF is uniquely determined by its moments of all orders(0 to infinity) [23].Figure 5 shows an example of two histograms which have the same estimates of first four moments. The histogram in panel
(a) is a velocity profile (ha) computed for a time series in our data, while panel (b) shows a histogram (hb) of random variablegenerated with distribution of type-1 from the Pearson system [32]; Matlab command: pearsonpdf. Figure 5 (c) demonstratesthat by using the EMD we can distinguish between distributions which have the same first four moments; it also illustrates howthe EDM between two experimental PDFs is computed. The red line, in Fig. 5 (c), is the experimental CDF of the histogramfrom panel (a), while the blue line is the experimental CDF of the histogram from panel (b). The EMD(ha, hb) between thetwo velocity profiles is the area between the red and the blue line, which is indicated with the magenta shading.In practice, to compute empirical CDFs we take the cumulative sum of histogram bins normalised by the number of data
points. We use histograms with 101 equidistant bins over fixed range of velocity values (outliers are assigned to the most extremebins). Furthermore, we normalise the EMDs with the maximal EMD for a given support Z; since |CDF1(z)� CDF2(z)| 1,the maximal EMD is given by the length of the support EMDmax = |Z|. EMD can be computed using following Matlab code:
1 bins=linspace(z1,z2,101); % support Z with 101 bins2 bin width=bins(2)-bins(1); % widths of the bins, i.e. dz3 max emd=abs(z2-z1); % maximal EMD4
5 h1=hist(v1,bins); % h1 and h2 are velocity profiles6 h2=hist(v2,bins); % v1 and v2 are velocity time series7 l1=numel(v1); % for normalistion8 l2=numel(v2); % for normalistion9 emd v1v2=sum(abs(cumsum(h1/l1)-cumsum(h2/l2)))*bin width/max emd;
Multidimensional scaling.We use multidimensional scaling (MDS) to study relations between players’ velocity profiles. MDSallows us to model the players’ motion as points in an abstract geometric space, which we name similarity space. It is a wellestablished tool in data visualisation and data mining [13]. It allows to reduce dimensionality of the data and visualise relationsbetween the objects under investigation while preserving as much information as possible. Since the EMD is a metric in the
Footline Author PNAS Issue Date Volume Issue Number 9
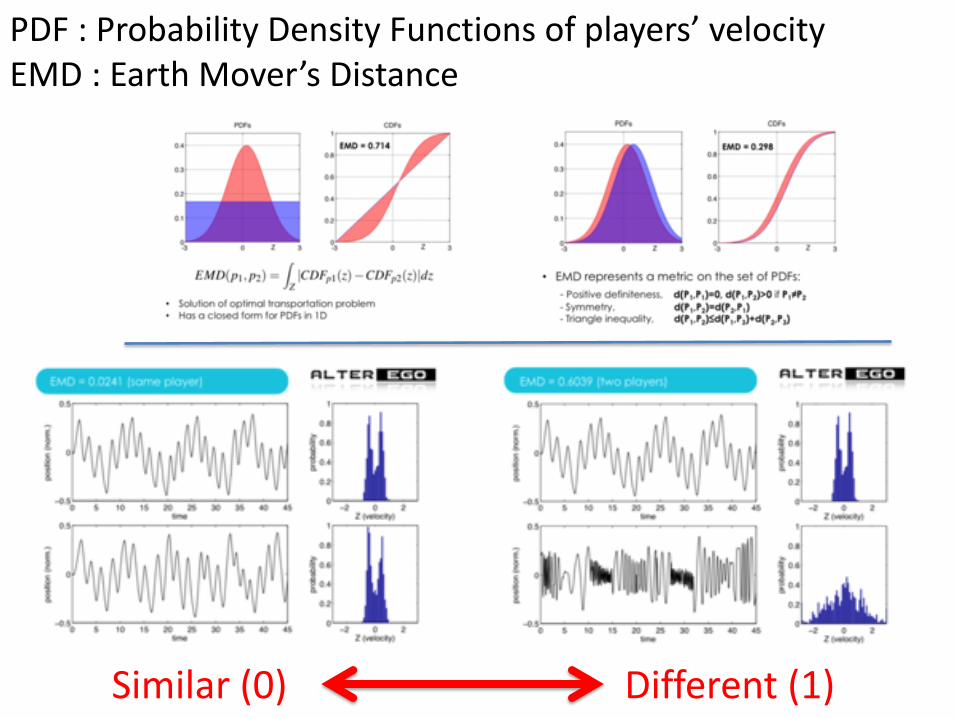
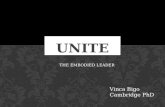
PDF : Probability Density Functions of players’ velocityEMD : Earth Mover’s Distance
Similar (0) Different (1)

Individual Motor Signature (IMS) and the similarity space
x: (first dimension of MDS): Average velocityy: (second dimension of MDS): Kurtosis
Solo Solo against VP
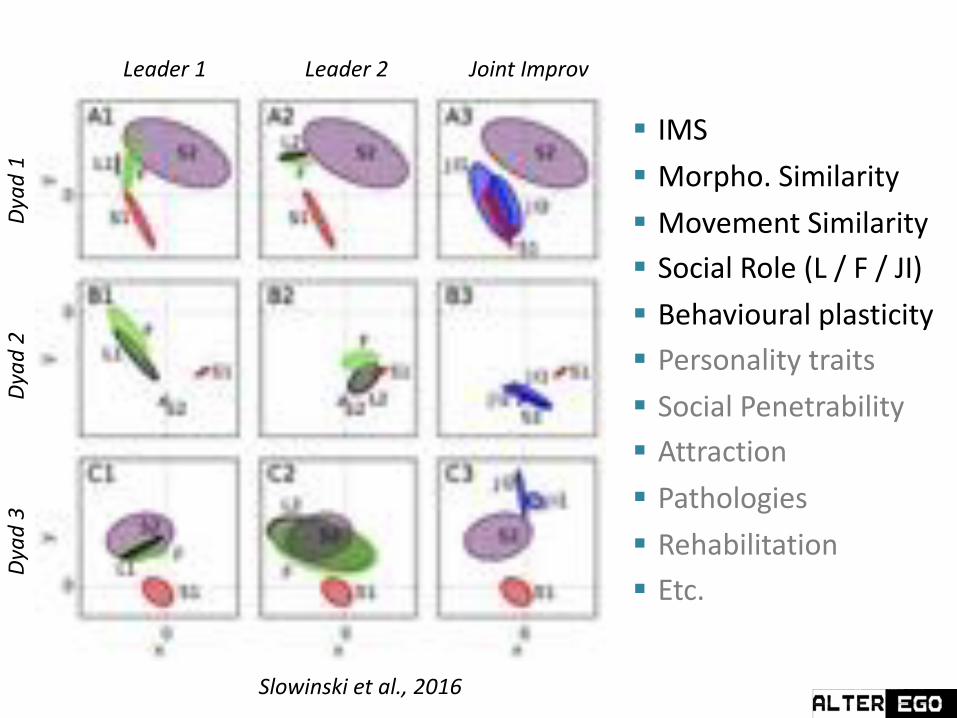
Slowinski et al., 2016
§ IMS§ Morpho. Similarity§ Movement Similarity§ Social Role (L / F / JI)§ Behavioural plasticity§ Personality traits§ Social Penetrability§ Attraction§ Pathologies§ Rehabilitation§ Etc.
Leader 1 Leader 2 Joint Improv
Dyad
1Dy
ad 2
Dyad
3

The AlterEgo cognitive architecture

Similarity space for patients vs. controls
Slowinski et al., submitted
§ 22 schizophrenic patients vs. 22 healthy controls§ ICub leader / Subject follower
-1.15
0.59
Posi
tion
[a.u
.]
(a)
(b)
4
2
1
0.5
0.25
0.125
0.0625
Freq
uenc
y [H
z]
(c)
0 1|φr(f)|
0 10 20 30 40 50Time [s]
-0.1
0
0.1
φr(t)
(d)
Probability
(e)
: distribution of absolute phase lag over frequencies φr f( )
-0.08 0 0.08x
-0.03
0
0.03
y
ControlsPatients
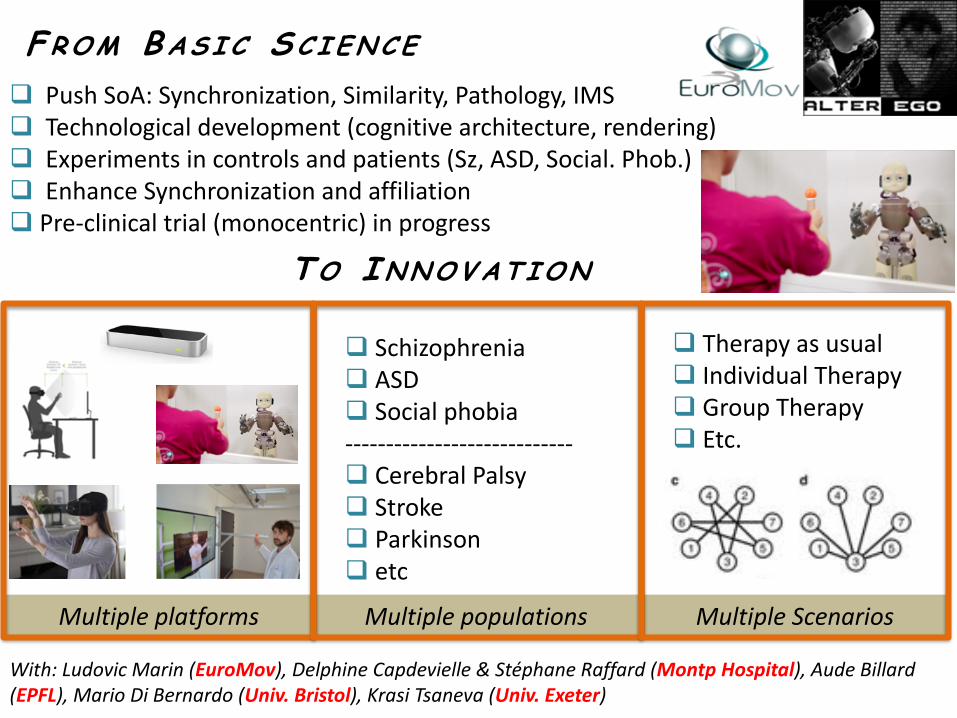
F ROM BASIC S CIENCE
With: Ludovic Marin (EuroMov), Delphine Capdevielle & Stéphane Raffard (Montp Hospital), Aude Billard(EPFL), Mario Di Bernardo (Univ. Bristol), Krasi Tsaneva (Univ. Exeter)
Multiple platforms
TO INNOVATION
Multiple populations Multiple Scenarios
q Therapy as usualq Individual Therapyq Group Therapyq Etc.
q Push SoA: Synchronization, Similarity, Pathology, IMSq Technological development (cognitive architecture, rendering)q Experiments in controls and patients (Sz, ASD, Social. Phob.)q Enhance Synchronization and affiliationq Pre-clinical trial (monocentric) in progress
q Schizophreniaq ASDq Social phobia----------------------------q Cerebral Palsyq Strokeq Parkinsonq etc
Figure 2: Interaction patterns implemented through visual coupling in the experiment. (a) Com-plete graph: each participant can see the movements of all the others. (b) Ring graph: each participant cansee the movements of only her/his two neighbours. (c) Path graph: similar to the ring graph configuration, butagents 1 and 7, defined as external, have only one neighbour (2 and 6, respectively) and consequently are notvisually coupled. (d) Star graph: agent 3, defined as central, can see the movements of all the others, definedas peripheral, who in turn see the movements of only the central player. The other panels show the actualarrangement of the players during the experiment [(e) for the complete graph, (f) for ring and path graphs,and (g) for the star graph].
9
Thank you !Virtual RealityJosé HenriquesNorbert SchmitzDidier Stricker
Movement SciencesSimone Dalla BellaLoic DammDobri DotovJérémie LandrieuMathieu GueugnonPetra IhalainenLudovic MarinRobin SalesseZhong Zhao
Bruno Mantel
Mathematical modeling Francesco AlderisioMario Di Bernardo Piotr SlowinskiKrasimira TsanevaChao Zhai
RoboticsAude BillardMadhi KhoramshahiLaura Cohen
Psychiatry
Catherine BortolonDelphineCapdevielleStephane Raffard
PsychologyRichard Schmidt
KinesiologyTom Stoffregen
Music CognitionMarc LemanBart Moens
ExploitationErik Hernandez
EngineeringRudi VillingTomas Ward
AeronauticsJean-Christophe SarrazinValérie Juppet / Charlotte Heulin