ENGINEERING Cableway oscillation problems...In the case of a “simple harmonic oscillation”, the...
4
INTERNATIONAL ROPEWAY REVIEW 6/2011 47 ENGINEERING Cableway oscillation problems Oscillations in ropeways are a frequent cause of operating problems and sometimes damage. For this reason, ISR published a series of articles on the subject in its German- language editions 1/2010 to 3/2011. In response to the keen interest shown by our readers, we have now decided to provide the articles in English and French, too. Since dynamic problems encoun- tered on ropeways re- quire a much more complex response than static systems, ropeway engineers tend to restrict them- selves to a quasi-stat- ic approach. In rope- way operations, how- ever, the laws of physics cannot be ignored, and dynamic phe- nomena in the form of various types of oscil- lations are very much a reality. Over the years,“oscillation problems in rope- ways” have been a frequent topic of research at the relevant universities and institutes, starting with an initial paper on the subject written by Professor Otto Zweifel of what was then the Institute of Construction and Transport Engineering at the Swiss Federal Institute of Technology in Zurich and pub- lished in ISR in 1972. In the abstract to his article, he wrote, “The purpose of this intro- ductory paper is to recall some of the basic facts of oscillation theory which engineers hear about in varying degrees of detail during their training but afterwards tend to forget, and then to address some specific oscillation phenomena as they affect ropeways.” In the context of this research focus at the Zurich institute – in the meantime renamed the Institute of Lightweight Structures and Ropeways – various oscillation processes en- countered in ropeways were made the subject of scientific research by Professor Gabor Oplatka and his team (Reto Canale, Georg Kopanakis, Gabor Kovacs, Willi Müller and Thomas Richter) in the 1980s and 90s. The subject of oscillations has lost none of its relevance for ropeway operations today, and Georg Kopanakis and Reto Canale kindly agreed to write a series of articles to familiar- ize the ISR readership with the basics of oscil- lations in ropeways in the spirit of the intro- duction to the subject provided by Professor Zweifel, and to indicate the solutions available for oscillation problems. The articles cover the main ropeway oscillation phenomena (rope oscillations, effects on towers and stations, and oscillations caused by wind, passage over the towers, system start-up and braking, and load shedding including ice release). The basics of oscillation theory are so clearly stated in Professor Zweifel’s initial article that we have decided to quote directly from his work here (source: O. Zweifel: “Schwingung- sprobleme bei Seilbahnen”, English and Ger- man, ISR 3/1972, p. 159). Fundamentals For oscillations to occur there must be an os- cillation system. A pendulum, for example, constitutes a simple oscillation system, which is capable of oscillating in the gravitational field. Ropeway cabins and ropes can also per- form oscillatory movements like a pendulum in the gravitational field. A spring-suspended mass is another form of a simple oscillation system. Like a spring-suspended mass, a ropeway cabin suspended from a track rope can oscillate up and down. The overall rope- way system, comprising a wide range of elas- tic members and mass bodies, is an extreme- ly complex oscillation system that is capable of oscillating in innumerable ways. The presence of an oscillation system, howev- er, does not necessarily mean that oscillation will occur. That requires some form of excita- tion; oscillation energy must be introduced in- to the system. The excitation must also occur in a specific way for oscillation to be triggered. This can be demonstrated by the case of a mass suspended from a helical spring. If the upper end of the spring is moved up and down very rapidly, the mass remains immo- bile. If the end of the spring is raised and low- ered extremely slowly, the mass follows the movement of the operator’s hand but no os- cillation occurs. But there is also a frequency – known as the natural or resonant frequen- cy – at which the mass will oscillate of its own accord. If the excitation is delivered at this frequency, even small movements in the end of the spring will generate pronounced oscil- lations. This is resonance. In Fig. 1 this situation is illustrated with ref- erence to a vehicle with a suspension system traveling over bumps in the ground with an amplitude a 0 . The amplitude of vehicle oscil- lation is a and vehicle speed is v. In the graph, the amplitude ratio a/a 0 is plotted on the y- axis over the speed ratio v/v k , where v k is the critical speed at which the bumps in the ground contact the wheels of the vehicle at the vehicle’s natural frequency. The graph shows that the amplitude for the resonance case (v/v k = 1) is in fact very large. Curves are plotted for different degrees of damping (D = 0 no damping, D = ∞ infinite damping). It is because of resonance phenomena that it is so important to be aware of the natural fre- quency of an oscillation system. In the case of ropeways, it is essential to know the natural frequencies of the ropes oscillating transverse- ly and longitudinally with or without addi- tionally oscillating masses. Account must al- so be taken of the natural frequencies of the towers, cabins, drives, tension weights, etc. Josef Nejez Fig. 1: Resonant oscillations in a vehicle passing over bumps in the ground.Where the bumps contact the wheels at the vehicle’s natural frequency, the amplitude of the oscillation is very large. Josef Nejez Techn. Editor of ISR Photo: archive ISR6_s47-50_ISR 09.12.11 13:31 Seite 47
Transcript of ENGINEERING Cableway oscillation problems...In the case of a “simple harmonic oscillation”, the...

I N T E R N AT I O N A L RO P E WAY R E V I E W 6 / 2 0 1 147
ENGINEERING
Cableway oscillation problemsOscillations in ropeways are a frequent cause of operating problems and sometimesdamage. For this reason, ISR published a series of articles on the subject in its German-language editions 1/2010 to 3/2011. In response to the keen interest shown by ourreaders, we have now decided to provide the articles in English and French, too.
Since dynamicproblems encoun-tered on ropeways re-quire a much morecomplex responsethan static systems,ropeway engineerstend to restrict them-selves to a quasi-stat-ic approach. In rope-way operations, how-ever, the laws of
physics cannot be ignored, and dynamic phe-nomena in the form of various types of oscil-lations are very much a reality.Over the years,“oscillation problems in rope-ways” have been a frequent topic of researchat the relevant universities and institutes,starting with an initial paper on the subjectwritten by Professor Otto Zweifel of whatwas then the Institute of Construction andTransport Engineering at the Swiss FederalInstitute of Technology in Zurich and pub-lished in ISR in 1972. In the abstract to hisarticle, he wrote, “The purpose of this intro-ductory paper is to recall some of the basicfacts of oscillation theory which engineershear about in varying degrees of detail duringtheir training but afterwards tend to forget,and then to address some specific oscillationphenomena as they affect ropeways.”In the context of this research focus at theZurich institute – in the meantime renamedthe Institute of Lightweight Structures andRopeways – various oscillation processes en-countered in ropeways were made the subjectof scientific research by Professor GaborOplatka and his team (Reto Canale, GeorgKopanakis, Gabor Kovacs, Willi Müller andThomas Richter) in the 1980s and 90s. The subject of oscillations has lost none of itsrelevance for ropeway operations today, andGeorg Kopanakis and Reto Canale kindlyagreed to write a series of articles to familiar-ize the ISR readership with the basics of oscil-lations in ropeways in the spirit of the intro-duction to the subject provided by ProfessorZweifel, and to indicate the solutions available
for oscillation problems. The articles cover themain ropeway oscillation phenomena (ropeoscillations, effects on towers and stations,and oscillations caused by wind, passage overthe towers, system start-up and braking, andload shedding including ice release).The basics of oscillation theory are so clearlystated in Professor Zweifel’s initial article thatwe have decided to quote directly from hiswork here (source: O. Zweifel: “Schwingung-sprobleme bei Seilbahnen”, English and Ger-man, ISR 3/1972, p. 159).
Fundamentals
For oscillations to occur there must be an os-cillation system. A pendulum, for example,constitutes a simple oscillation system, whichis capable of oscillating in the gravitationalfield. Ropeway cabins and ropes can also per-form oscillatory movements like a pendulumin the gravitational field. A spring-suspendedmass is another form of a simple oscillationsystem. Like a spring-suspended mass, aropeway cabin suspended from a track ropecan oscillate up and down. The overall rope-way system, comprising a wide range of elas-tic members and mass bodies, is an extreme-ly complex oscillation system that is capableof oscillating in innumerable ways.The presence of an oscillation system, howev-er, does not necessarily mean that oscillationwill occur. That requires some form of excita-tion; oscillation energy must be introduced in-to the system. The excitation must also occurin a specific way for oscillation to be triggered.This can be demonstrated by the case of amass suspended from a helical spring. If theupper end of the spring is moved up anddown very rapidly, the mass remains immo-bile. If the end of the spring is raised and low-ered extremely slowly, the mass follows themovement of the operator’s hand but no os-cillation occurs. But there is also a frequency– known as the natural or resonant frequen-cy – at which the mass will oscillate of its ownaccord. If the excitation is delivered at thisfrequency, even small movements in the end
of the spring will generate pronounced oscil-lations. This is resonance.
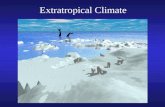
In Fig. 1 this situation is illustrated with ref-erence to a vehicle with a suspension systemtraveling over bumps in the ground with anamplitude a0. The amplitude of vehicle oscil-lation is a and vehicle speed is v. In the graph,the amplitude ratio a/a0 is plotted on the y-axis over the speed ratio v/vk, where vk is thecritical speed at which the bumps in theground contact the wheels of the vehicle atthe vehicle’s natural frequency. The graphshows that the amplitude for the resonancecase (v/vk = 1) is in fact very large. Curves areplotted for different degrees of damping (D= 0 no damping, D = ∞ infinite damping).It is because of resonance phenomena that itis so important to be aware of the natural fre-quency of an oscillation system. In the case ofropeways, it is essential to know the naturalfrequencies of the ropes oscillating transverse-ly and longitudinally with or without addi-tionally oscillating masses. Account must al-so be taken of the natural frequencies of thetowers, cabins, drives, tension weights, etc.
Josef Nejez
Fig. 1: Resonant oscillations in a vehicle passing overbumps in the ground. Where the bumps contact thewheels at the vehicle’s natural frequency, the amplitudeof the oscillation is very large.
Josef NejezTechn. Editor of ISR
Phot
o: a
rchi
ve
ISR6_s47-50_ISR 09.12.11 13:31 Seite 47
Verwendete Acrobat Distiller 8.0/8.1 Joboptions
Dieser Report wurde mit Hilfe der Adobe Acrobat Distiller Erweiterung "Distiller Secrets v4.0.0" der IMPRESSED GmbH erstellt.Registrierte Kunden können diese Startup-Datei für die Distiller Versionen 8.0/8.1 kostenlos unter http://www.impressed.de/DistillerSecrets herunterladen.ALLGEMEIN ----------------------------------------Beschreibung: Postyellow-PDF PDF 1.4 + Transparency Colour spaces remain as used Printing resolution for commercial printing up to 2540 dpiDateioptionen: Kompatibilität: PDF 1.4 Komprimierung auf Objektebene: Nur Tags Seiten automatisch drehen: Aus Bund: Links Auflösung: 1200 dpi Alle Seiten Piktogramme einbetten: Nein Für schnelle Web-Anzeige optimieren: NeinPapierformat: Breite: 240.002 Höhe: 327.002 mmKOMPRIMIERUNG ------------------------------------Farbbilder: Neuberechnung: Bikubische Neuberechnung auf 350 ppi (Pixel pro Zoll) für Auflösung über 571 ppi (Pixel pro Zoll) Komprimierung: Automatisch (JPEG) Bildqualität: MaximalGraustufenbilder: Neuberechnung: Bikubische Neuberechnung auf 350 ppi (Pixel pro Zoll) für Auflösung über 571 ppi (Pixel pro Zoll) Komprimierung: Automatisch (JPEG) Bildqualität: MaximalSchwarzweißbilder: Neuberechnung: Aus Komprimierung: CCITT Gruppe 4 Mit Graustufen glätten: AusRichtlinien: Richtlinien für Farbbilder Bei Bildauflösung unter: 150 ppi (Pixel pro Zoll) Ignorieren Richtlinien für Graustufenbilder Bei Bildauflösung unter: 150 ppi (Pixel pro Zoll) Ignorieren Richtlinen für monochrome Bilder Bei Bildauflösung unter: 1200 ppi (Pixel pro Zoll) IgnorierenFONTS --------------------------------------------Alle Schriften einbetten: JaUntergruppen aller eingebetteten Schriften: NeinWenn Einbetten fehlschlägt: AbbrechenEinbetten: Schrift immer einbetten: [ ] Schrift nie einbetten: [ ]FARBE --------------------------------------------Farbmanagement: Einstellungsdatei: None Farbmanagement: Farbe nicht ändern Wiedergabemethode: StandardGeräteabhängige Daten: Unterfarbreduktion und Schwarzaufbau beibehalten: Ja Transferfunktionen: Entfernen Rastereinstellungen beibehalten: NeinERWEITERT ----------------------------------------Optionen: Überschreiben der Adobe PDF-Einstellungen durch PostScript zulassen: Nein PostScript XObjects zulassen: Nein Farbverläufe in Smooth Shades konvertieren: Ja Geglättene Linien in Kurven konvertieren: Nein Level 2 copypage-Semantik beibehalten: Ja Einstellungen für Überdrucken beibehalten: Ja Überdruckstandard ist nicht Null: Ja Adobe PDF-Einstellungen in PDF-Datei speichern: Nein Ursprüngliche JPEG-Bilder wenn möglich in PDF speichern: Ja Portable Job Ticket in PDF-Datei speichern: Nein Prologue.ps und Epilogue.ps verwenden: Nein JDF-Datei (Job Definition Format) erstellen: Nein(DSC) Document Structuring Conventions: DSC-Kommentare verarbeiten: Ja DSC-Warnungen protokollieren: Nein EPS-Info von DSC beibehalten: Ja OPI-Kommentare beibehalten: Nein Dokumentinfo von DSC beibehalten: Ja Für EPS-Dateien Seitengröße ändern und Grafiken zentrieren: JaSTANDARDS ----------------------------------------Standards - Berichterstellung und Kompatibilität: Kompatibilitätsstandard: OhneANDERE -------------------------------------------Distiller-Kern Version: 8000ZIP-Komprimierung verwenden: JaASCII-Format: NeinText und Vektorgrafiken komprimieren: JaMinimale Bittiefe für Farbbild Downsampling: 1Minimale Bittiefe für Graustufenbild Downsampling: 2Farbbilder glätten: NeinGraustufenbilder glätten: NeinFarbbilder beschneiden: NeinGraustufenbilder beschneiden: NeinSchwarzweißbilder beschneiden: NeinBilder (< 257 Farben) in indizierten Farbraum konvertieren: JaBildspeicher: 1048576 ByteOptimierungen deaktivieren: 0Transparenz zulassen: JaICC-Profil Kommentare parsen: JasRGB Arbeitsfarbraum: sRGB IEC61966-2.1DSC-Berichtstufe: 0Flatness-Werte beibehalten: NeinGrenzwert für künstlichen Halbfettstil: 1.0RGB-Repräsentation als verlustfrei betrachten: NeinOptionen für relative Pfade zulassen: NeinIntern: Alle Bilddaten ignorieren: NeinIntern: Optimierungen deaktivieren: 0Intern: Benutzerdefiniertes Einheitensystem verwenden: 0Intern: Pfad-Optimierung deaktivieren: NeinENDE DES REPORTS ---------------------------------Die "Distiller Secrets" Startup-Datei ist eine Entwicklung derIMPRESSED GmbHBahrenfelder Chaussee 4922761 Hamburg, GermanyTel. +49 40 897189-0Fax +49 40 897189-71Email: [email protected]: www.impressed.de

The world is con-stantly in motion. Asa simplification,“movements” relat-ing to the subject ofoscillation can be di-vided into two cate-gories depending onwhether somethingmoves back and forthrelative to a fixed lo-cation or whether it
travels from one point to another.
The first group comprises such movements asvibrations in a body, the movement of a pen-dulum, the oscillation of an electrical oscilla-tor circuit and so on. In such cases we speakof “oscillations” and often, in the case of me-chanical oscillations, of “vibrations”. Move-ments in the latter category include such phe-nomena as the movement of the surface of thewater in swell, the movement of a wave alonga guitar string or a rope, and the propagationof sound, etc. Here we speak of “waves”.
Oscillations and vibrations
A body will oscillate when it is disturbedfrom a position of stable equilibrium and“subsequently forced” to return to the initialposition by “restoring force FR”(Fig. 1).
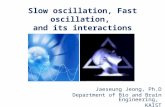
The simplest types of oscillating systems arethe “spring-mass system” and the “oscillatingpendulum”. Their movement processes canbe described in simple mathematical terms;the resulting movement is called a simple har-monic oscillation. In the case of a “simpleharmonic oscillation”, the various positionsof the body can be plotted over time as a sinewave (Fig. 2).
In the oscillation process, kinetic energy iscontinuously converted into potential ener-gy and vice-versa. At the highest point of de-flection “o” and the lowest point “u”, veloc-ity and momentary kinetic energy are zero,while potential energy is greatest in keepingwith maximum spring extension and com-pression. In the mid position “m” (equilibriumpoint), velocity and momentary kinetic en-ergy in the system are at a maximum, whilepotential energy, in the presence of the un-loaded spring, is zero. The “period” of timethat elapses before the oscillating mass pass-es the same position in the same direction isthe “time period” “T”.
The distance between equilibrium point “m”and maximum displacement points “o” and“u” is the amplitude “A” of the oscillation.
The number of time periods (wave cycles)that can occur in a unit of time is “frequen-cy” “f”. Frequency is the reciprocal value ofthe time period: f=1/T.
Waves
In a “medium” like water, the string of a gui-tar or a rope, waves are also triggered by a dis-turbance introduced at some point in themedium. In this case, however, we are nottalking about the behavior of a completebody but about the behavior and interactionof the individual particles of which the medi-um is composed and which are involved inthe formation and propagation of the wave.
It should be underscored that in the case of apropagating wave, each individual particleperforms a harmonious movement around afixed position (equilibrium point) as in thecase of the oscillation of a spring-mass sys-tem. The perceived movement of the wave ismerely a change in the shape of the medium;no mass flow takes place! (Fig. 3).
I N T E R N AT I O N A L RO P E WAY R E V I E W 6 / 2 0 1 148
ENGINEERING
Fig. 3: Running wave: When the wave moves in the direction of propagation, each particle moves aroundits own equilibrium point. That is illustrated here bythe “yellow particle”, which performs a harmoniousoscillation between the two maximum deflectionpoints during wave propagation.
Fundamentals on the subject of oscillations and waves (recapitulation of the basics of oscillation theory for oscillation problems encountered on ropeways).
Oscillations in ropeways,part 1
Gra
phic
s: G
. Kop
anak
is
Dipl.-Ing. Georg A. Kopanakis
Phot
o: a
rchi
ve
Fig.1: Spring-mass system and oscillating pendulum Fig. 2: Harmonic movement
ISR6_s47-50_ISR 09.12.11 13:31 Seite 48

When the direction of movement of the in-dividual particles is transverse to the directionof propagation of the wave, we speak of a“transverse wave”; when it is parallel to the di-rection of propagation, it is a “longitudinalwave” (Fig. 4).
The wave produced in a guitar string or arope following excitation (plucking) is anexample of a transverse wave; sound wavesare a typical example of longitudinalwaves.
The distance between two successive particleswith the same value on the y axis and thesame direction of movement is “wavelength”“l”. Time period “T” is the time required bythe wave to travel a wavelength.
In the case of waves, too, the distance be-tween the equilibrium position and the max-imum displacement points of a particle is“amplitude” “A”.
The number of wavelengths that pass a fixedpoint during a unit of time is again „frequen-cy” „f ”.
When a wave travels along an infinitely longmedium, e.g. the surface of the sea, we speakof a “running wave”. The characteristic fea-tures of a running wave are the constant di-rection of travel and the infinite variety ofpossible wavelengths (Fig. 3).
When a wave travels along a finite medium,it is reflected at the end of the medium, i.e.the direction of travel is reversed after everyreflexion.. In this case, only certain wave-lengths can occur depending on the length ofthe field line. Such waves are known as“standing waves” (Fig. 5).
Damping
Theoretically, i.e. in a frictionless environ-ment, a body that has been caused to oscillateas a result of a single disturbance will contin-ue to oscillate ad infinitum, as the above-mentioned energy conversion will continueinfinitely without energy loss. A real system,i.e. a system in an environment to which thelaws of friction apply, on the other hand,eventually returns to a state of rest followinga single disturbance because some of the en-ergy is constantly dissipated in the form offrictional losses. This process, involving con-tinuously declining amplitudes, is known as“damping”. Real systems are always subject todamping; they differ only in the degree ofdamping (Fig. 6).
Free and forced oscillations andnatural frequency
A real system caused to oscillate by a singledisturbance and nothing more performs a“free oscillation”. As mentioned above, how-ever, energy is constantly released to the en-vironment so that the system returns to theequilibrium position after a certain length oftime or number of cycles. The frequency of a
freely oscillating system depends on the massand stiffness of the system itself. This fre-quency is characteristic of the system and re-mains constant. It is known as the “naturalfrequency”.
If a real system is to continue to oscillate, ad-ditional energy must be introduced fromwithout. A repeated source of disturbance,known as the “exciter”, keeps the system sup-plied with energy and the oscillation is main-tained. In this case we speak of “forced oscil-lation” (Fig. 7). Most types of oscillation andwave phenomena in the field of ropewaysthat we will be looking at are forced oscilla-tions.
Initiation and intensity of oscil-lations and types of exciter
Oscillations occur when we have both an “os-cillatable system” and an “exciter” capable ofsupplying the system with energy on a one-off or continuous basis.
A system is considered to be oscillatable whenit has both mass and elasticity. Since all real-life systems are neither without mass nor per-fectly rigid, they can all be caused to oscillatein the presence of a suitable exciter. ■ In the case of a single excitation, the ampli-tude of the oscillation diminishes at a ratethat depends on the degree of damping (Fig. 6).■ A system can be subjected to multiple, butrandom excitation. In this case we speak, notof periodic but of stochastic (random) excita-tion.■ Finally, if the excitation is harmonious, thesystem will respond with a harmonious oscil-lation at a frequency corresponding to that ofthe excitement.The most important point in the case offorced oscillation is the fact that the ampli-tude of the oscillator depends on the frequen-cy of the exciter. If, in the case of an un-damped oscillation, exciter frequency is iden-tical with the natural frequency of the oscil-
I N T E R N AT I O N A L RO P E WAY R E V I E W 6 / 2 0 1 149
ENGINEERING
Fig. 5: Standing wave (only certain wavelengths possible)
Fig. 6: Damping
Fig. 4: Transverse and longitudinal waves
Fig. 7: Forced oscillation
ISR6_s47-50_ISR 09.12.11 13:31 Seite 49

lator, its amplitude increases infinitely, a statethat is known as “resonance”. For a real sys-tem this means that, in the case of resonance,the system’s amplitude – especially if there islittle damping – can become very large andthe system will be subjected to correspond-ingly greater loads (Fig. 8).
Solutions to oscillation prob-lems
The first approach to tackling an oscillationproblem is to “eliminate the cause”, i.e. theexciter, regardless of whether one-off or peri-odic excitement is involved. As we shall seelater, however, this is rarely possible. Thismeans that alternatives normally have to besought, and although they may not com-pletely eliminate the oscillation, it will bepossible to reduce the intensity of the oscilla-tion to a level at which it no longer has anysignificant impacts (excessive loads on struc-tural components, noise, reduced quality ofthe ride, etc).
Unfortunately, the following potential solu-tions are not effective in all cases or applica-ble to all oscillation phenomena and must beinvestigated separately in the individual case.
■ Changing exciter frequency or the naturalfrequency of the oscillator in order to miti-gate the resonance effect is an effective solu-tion, but it may involve operating restrictionsor significant re-engineering. ■ Damping the oscillations is only effective inthe case of oscillations above a “certain ampli-tude”.■ Isolating the exciter (i.e. interrupting theenergy flow from the exciter to the oscillator)has the disadvantage that the stability and/orgeometry of the system could be compro-mised.■ Superimposing a counter-oscillation, amethod known as active oscillation damping,requires continuous intervention within thesystem.
In the next chapter we will be looking at theoscillations caused in the structural compo-nents of a ropeway installation by passage ofthe rope over the sheaves and bullwheels. To close, I should like to express my sincerethanks to Dipl.-Ing. ETH Reto Canale (Di-rector of the IKSS intercantonal authority)and Dipl.-Ing. ETH Istvan Szalai (CEO Gar-aventa AG) for their critical review of themanuscript and helpful suggestions.
Georg A. Kopanakis
ENGINEERING
50I N T E R N AT I O N A L RO P E WAY R E V I E W 6 / 2 0 1 1
Fig. 8: Resonance: The graph shows the amplitude ofthe oscillator as a function of the frequency of theexciter. The x axis (frequency of the exciter) is “normalized” to the resonant frequency of the oscil-lator (f0), i.e. the value “1” corresponds to the valuefor the resonant frequency of the oscillator. The y-axis (amplitude of the oscillator) is “normalized” tothe amplitude of the exciter (A0), i.e. the value “1”corresponds to the value for the amplitude of theexciter, and the oscillator performs exactly themovement determined by the exciter. The closer ex-citer frequency, starting from lower values, comes tothe resonant frequency of the oscillator, the greaterthe amplitude of the oscillator. Once exciter fre-quency exceeds resonant frequency, the amplitude of the oscillator gradually declines again. When ex-citer frequency is high enough, the system will finallycome to a stop. “κ” is the “amping constant”.
IMPRESSUM/IMPRINTMedieninhaber (Verleger) ● Owner: Bohmann Druck und Verlag, Gesellschaft m.b.H. & Co. KG, A-1110 Wien, Leberstraße 122, Tele fon: +43(1)740 95-0, Telefax: +43(1)740 95-537, DVR 0408689Herausgeber ● Pu b li sher: Komm.-Rat Dr. Rudolf BohmannGeschäftsleitung ● Managing directors: Mag. Dr. Gabriele Ambros, Gerhard MilletichVerlagsleitung: ● Management: Mag. Dr. Gabriele Ambros, Mag. (FH) Patrick Lenhart Redaktion ● Editorial staff: Chefredakteur Mag. (FH) Josef Schramm (JS); Leitender Redakteur Mag. Christian Amtmann (CA); Fachtechn. Redakteur Univ.-Prof. Dipl.-Ing. Dr. techn. Josef Nejez (JN); Redaktions assistenz & Anzeigenverwaltung Birgit Holzer; E-Mail: [email protected], Internet: www.isr.atAnzeigenverkauf ● Advertisement sales: Mag. (FH) Josef Schramm, Dietrich KopsLayout & electronic Publishing: Markus FrühwirthUmwelt ● Environment: Dipl.-Ing. Dr. Maria Nejez, LandschaftsarchitektinAutoren und Mitarbeiter ● Authors and Contributors: Burgi Triendl-Schwetz, Innsbruck; Dr. Ing. Heinrich Brugger, Bozen; Dr. Gabor Kovacs, Zürich; Ing. Reijo Riila, Helsinki; Resham Raj Dhakal, NepalFrankreich ● France: Alain Soury-Lavergne, 40 chemin de Malanot, F-38700 Corenc, Tel. +33/(0)476 88 03 10, E-Mail: [email protected] ● Italy: Dr. Ing. Heinrich Brugger, Claudia de Medicistr. 19, I-39100 Bozen, Tel. +39/0471/300 347, Mob.+39 347 5907305, E-Mail: [email protected] – Canada: Beat von Allmen, 2871 South 2870 East, Salt Lake City, Utah 84109, Tel. +1/801/468 26 62, E-Mail: [email protected], Slowakei und Polen ● Czech Republic, Slovakia, Poland: Dipl.-Ing. Roman Gric, Has kova 14, CZ-638 00 Brno-Lesná, Tel. +420/5/41 637 297, E-Mail: [email protected] ● CIS: Dr. David Pataraia, Shertavastr. 18/16, Tbilissi-1060, Georgien, Tel. & Fax +995/32/373785, E-Mail: [email protected]; Maya SemivolosovaRumänien und Bulgarien ● Romania and Bulgaria: Dipl.-Ing.Petre Popa jr., str. Lunga 53 c/7, RO-500035 Brasov, Tel. & Fax +40/268/5436 98, E-Mail: [email protected] ● China: Dr. Ou Li, Dr. Schober Str. 84 199, A-1130 Wien, Tel. +43/1/889 74 10, Fax+43/1/889 87 19, E-Mail: [email protected]; Autorisierte Übersetzer ● Translation: Dr. Chris Marsh (E), Andrée Pazmandy Lic. ès. L. (F), Federico Dalpiaz (ES), Mag. Hubert Rinner (IT) Vertriebsleitung ● Dispatch manager: Angelika Stola, Tel.: +43/1/740 95-462, Erscheint 6 mal jährlich/published 6 times a yearAbonnementverwaltung ● Subscriptions: [email protected] ● Austria: Einzelpreis: € 19,95; Jahres be zugs preis: € 109,90 (inkl. 10 % MwSt), Ausland ● Other countries: Einzelpreis/single issue: € 23,30; Jahres bezugs preis/6 issues/year: € 130,00 (inkl. MwSt, inkl. Porto u. Ver sandspesen), Die Abonnementgebühr ist im Voraus zu ent richten. Das Abonnement ist spätestens 30 Tage vor Bezugsjahresende schriftlich kündbar.Bankverbindungen ● Bank accounts: Bank Austria Creditanstalt AG 653-092-700; Österr. Postsparkasse 1732.755Druck ● Print: AV + Astoria Druckzentrum, A-1030 Wien, Faradaygasse 6, Druckauflage 1. Halbjahr 2011 ● Circulation 1st half-year 2011: 6.500
ISR6_s47-50_ISR 09.12.11 13:31 Seite 50