Energy scavenging with shoe-mounted piezoelectrics - Micro ... · Joseph A. Paradiso MIT Media...
13
30 Consumer reliance on wearable elec- tronic devices has grown significantly in the past decade. With increasing use come demands for decreased size and enhanced capabilities, neces- sitating new ways to supply electric energy to these devices. Until now, chemical-cell batteries have been sufficient, but replacing them is a costly nuisance, and this solution will become less practical as demands evolve. Another approach is a centralized, body-worn power pack, with multiple distribution lines, but such a system will be cumbersome and impractical as the user wears more devices. Fortunately, as power requirements drop for body-worn devices, a third approach, which eliminates the power wiring problem, is emerg- ing: developing and storing electric energy at the devices themselves by scavenging waste energy from human activities. For example, the average person spends a significant part of the day on foot, dissipating abundant energy into the insole of a shoe. Harnessed unobtru- sively, this wasted energy could be used in a variety of low-power applications, such as pagers, health monitors, self-powered emer- gency receivers, radio frequency identification (RFID) tags, and emergency beacons or loca- tors. If wiring devices to the generator proves impractical for some applications, a battery could be trickle-charged at the shoe and man- ually moved into the devices. Studies at the MIT Media Laboratory have explored the feasibility of harnessing waste energy from a variety of body sources. Thad Starner’s benchmark conceptual investigation in 1995 analyzed various human activities and found that the heel strike during walking is the most plentiful and readily tapped source of waste energy. 1 Starner estimated that 67 watts of power are available in the heel move- ment of an average (68 kg) person walking at a brisk pace (two steps per second with the foot moving 5 cm vertically). Admittedly, scavenging most of that energy unobtrusive- ly would be impossible. But even a small per- centage of it (up to a sizable fraction of a watt), 2 removed imperceptibly, would provide enough power to operate many of the body- worn systems on the market today. A second MIT Media Lab study 3 and inde- pendent work at other institutions (for exam- ple, Antaki et al. 4 ) supported this conclusion Nathan S. Shenck Joseph A. Paradiso MIT Media Laboratory, Responsive Environments Group DECREASING SIZE AND POWER REQUIREMENTS OF WEARABLE MICROELECTRONICS MAKE IT POSSIBLE TO REPLACE BATTERIES WITH SYSTEMS THAT CAPTURE ENERGY FROM THE USER’S ENVIRONMENT . UNOBTRUSIVE DEVICES DEVELOPED AT THE MIT MEDIA LAB SCAVENGE ELECTRICITY FROM THE FORCES EXERTED ON A SHOE DURING WALKING: A FLEXIBLE PIEZOELECTRIC FOIL STAVE TO HARNESS SOLE-BENDING ENERGY AND A REINFORCED PZT DIMORPH TO CAPTURE HEEL-STRIKE ENERGY . 0272-1732/01/$10.00 2001 IEEE ENERGY SCAVENGING WITH SHOE-MOUNTED PIEZOELECTRICS
Transcript of Energy scavenging with shoe-mounted piezoelectrics - Micro ... · Joseph A. Paradiso MIT Media...

30
Consumer reliance on wearable elec-tronic devices has grown significantly in the pastdecade. With increasing use come demands fordecreased size and enhanced capabilities, neces-sitating new ways to supply electric energy tothese devices. Until now, chemical-cell batterieshave been sufficient, but replacing them is acostly nuisance, and this solution will becomeless practical as demands evolve. Anotherapproach is a centralized, body-worn powerpack, with multiple distribution lines, but sucha system will be cumbersome and impracticalas the user wears more devices.
Fortunately, as power requirements drop forbody-worn devices, a third approach, whicheliminates the power wiring problem, is emerg-ing: developing and storing electric energy atthe devices themselves by scavenging wasteenergy from human activities. For example,the average person spends a significant part ofthe day on foot, dissipating abundant energyinto the insole of a shoe. Harnessed unobtru-sively, this wasted energy could be used in avariety of low-power applications, such aspagers, health monitors, self-powered emer-gency receivers, radio frequency identification
(RFID) tags, and emergency beacons or loca-tors. If wiring devices to the generator provesimpractical for some applications, a batterycould be trickle-charged at the shoe and man-ually moved into the devices.
Studies at the MIT Media Laboratory haveexplored the feasibility of harnessing wasteenergy from a variety of body sources. ThadStarner’s benchmark conceptual investigationin 1995 analyzed various human activities andfound that the heel strike during walking isthe most plentiful and readily tapped sourceof waste energy.1 Starner estimated that 67watts of power are available in the heel move-ment of an average (68 kg) person walking ata brisk pace (two steps per second with thefoot moving 5 cm vertically). Admittedly,scavenging most of that energy unobtrusive-ly would be impossible. But even a small per-centage of it (up to a sizable fraction of awatt),2 removed imperceptibly, would provideenough power to operate many of the body-worn systems on the market today.
A second MIT Media Lab study3 and inde-pendent work at other institutions (for exam-ple, Antaki et al.4) supported this conclusion
Nathan S. ShenckJoseph A. ParadisoMIT Media Laboratory,
Responsive Environments
Group
DECREASING SIZE AND POWER REQUIREMENTS OF WEARABLE
MICROELECTRONICS MAKE IT POSSIBLE TO REPLACE BATTERIES WITH
SYSTEMS THAT CAPTURE ENERGY FROM THE USER’S ENVIRONMENT.
UNOBTRUSIVE DEVICES DEVELOPED AT THE MIT MEDIA LAB SCAVENGE
ELECTRICITY FROM THE FORCES EXERTED ON A SHOE DURING WALKING: A
FLEXIBLE PIEZOELECTRIC FOIL STAVE TO HARNESS SOLE-BENDING ENERGY
AND A REINFORCED PZT DIMORPH TO CAPTURE HEEL-STRIKE ENERGY.
0272-1732/01/$10.00 2001 IEEE
ENERGY SCAVENGING WITHSHOE-MOUNTED PIEZOELECTRICS

and proposed a system ofembedded piezoelectric mate-rials and miniature controlelectronics. The researchersobserved that a shoe or boothaving a relatively large vol-ume of space available in thesole and the heel platformwould make an ideal test bedfor exploring body-energyharvesting.
In the years since these stud-ies, researchers have furtherexplored parasitic power har-vesting in shoes. In particular,at the MIT Media Lab, wehave implemented a demon-stration of shoe power at workand developed new ways toefficiently condition raw, low-frequency piezoelectric shoesignals into a continuous, reli-able energy source. Otherapproaches use rigid piezoelec-tric materials driven at reso-nance to achieve higher powerlevels. In contrast, we haveconcentrated on embeddingsimple mechanical structuresand flexible piezoelectric mate-rials into the shoe, resulting inminimal impact on the shoe’sdesign or feel.
Piezoelectric shoe power: two approachesThe piezoelectric effect—a material’s capac-
ity to convert mechanical energy into electri-cal energy, and the inverse—is observable in awide array of crystalline substances that haveasymmetric unit cells. When an external forcemechanically strains a piezoelectric element,these polarized unit cells shift and align in aregular pattern in the crystal lattice. The dis-crete dipole effects accumulate, developing anelectrostatic potential between opposing facesof the element. Relationships between theforce applied and the subsequent response ofa piezoelectric element depend on three fac-tors: the structure’s dimensions and geome-try, the material’s piezoelectric properties, andthe mechanical or electrical excitation vector.
To designate direction within a piezoelectricelement, engineers conventionally define a
three-dimensional, orthogonal modal space, asshown in Figure 1a. The various electro-mechanical operation modes identify the elec-trical and mechanical excitation axes: perconvention, electrical I/O appears along thefirst-named i-axis, and its mechanical counter-part appears along the following j-axis. As Fig-ures 1a and 1b show, the top and bottom of thepiezoelectric material are metallized, causing the3-axis to be electrically coupled. During man-ufacture, the material is “poled” when a highvoltage is applied across the 3-axis electrodes atelevated temperature, reordering the unit cellsso they produce a voltage across the 3-axis inresponse to strain across axes 1, 2, or 3.5 Forexample, 31-mode operation signifies transversemechanical strain along the 1-axis, inducing anelectric field along the 3-axis, as shown in Fig-ure 1b. This action is equivalent to pulling both
31MAY–JUNE 2001
3
12
Electrostaticpoling direction
(across metallizedsurfaces)
Mechanically stressed axis
during fabrication
Piezoelectric material
Front ofshoe
(a)
(b)
(c)
Expansion strain along 1-axis
Compression strainalong 1-axis
View from side of shoe
along3-axis
VoutMetallized
piezoelectric laminate
Metallizedpiezoelectric laminate
Piezoelectricelement
Neutral axis
Compression strain along 3-axis
Thicknessof heelinsole
Figure 1. Conventional axis definition for a piezoelectric material (a). Our applications rely on 31-mode (b) in bending. The 33-mode (c)—when the heel motion in the 3-axis direction compress-es the shoe’s sole and induces an electric field along the same axis—is intuitively appealing butinefficient because of the small integrated strain across the thickness dimension (3-axis).
ends of a ruler, thereby developing a potentialdifference between the ruled faces.
Piezoelectric materials can be fabricatedfrom crystals, ceramics, or flexible foils. In
addition to applications as sensors or inputdevices (such as this one), piezoelectric mate-rials can be driven with a voltage to producemechanical deflection, for a wide range of output-device applications.
An insole’s dimensions limit the size andshape of materials that can be integrated intofootwear without loss of comfort or a radicalchange in design. Therefore, a thin, flat piezo-electric element is a natural choice for thisapplication. Commonly, we excite an elementof this shape in 31-mode operation by flexinga plate about its neutral axis, inducing com-pression or extension of the piezoelectric mate-rial bonded to the plate’s faces (Figure 1b).Although intuitively attractive, bulk compres-sion under the wearer’s weight (33-mode exci-tation, as shown in Figure 1c) is impracticalbecause of the typical material and electro-mechanical properties of inelastic piezoelectricsand the limited forces exerted in walking.Other excitation modes are equally impracti-cal under these constraints. Therefore, we con-sider 31-mode operation most appropriate forharnessing waste energy in an insole.
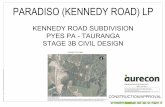
We explored two main methods, illustrat-ed in Figure 2, of piezoelectrically scavengingshoe power in bending 31-mode operation.One method is to harness the energy dissi-pated in bending the ball of the foot, using aflexible, multilaminar polyvinylidene fluoride(PVDF) bimorph stave mounted under theinsole. The second method is to harness footstrike energy by flattening curved, prestressedspring metal strips laminated with a semiflex-ible form of piezoelectric lead zirconatetitanate (PZT) under the heel. This device,which we call a dimorph, consists of two back-to-back, single-sided unimorphs.
We developed the elongated, hexagonal,multilaminate piezoelectric-foil stave6 in col-laboration with Kyung Park and Minoru Todaof the Sensor Products Division of Measure-ment Specialties (formerly AMP Sensors).Thestave consists of two eight-layer stacks of 28-micron PVDF sandwiching a 2-mm flex-ible plastic substrate bonded with epoxy. Thehexagonal design maximizes integrated stressacross the bending distribution of a typicalinsole and conforms to the shoe’s shape (seeFigure 3a). Bending the stave elongates its out-side surface and compresses its inside surfacewith respect to its plastic core because of their
32
Shoe-Mounted Piezoelectrics
IEEE MICRO
Insole
Sole
PVDFstave
PZTdimorph
Metalmidplate
PZT unimorph
PZT unimorph
Figure 2. Two approaches to unobtrusive 31-mode piezoelectric energy scav-enging in shoes: a PVDF stave under the ball of the foot and a PZT dimorphunder the heel.
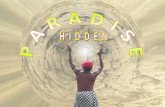
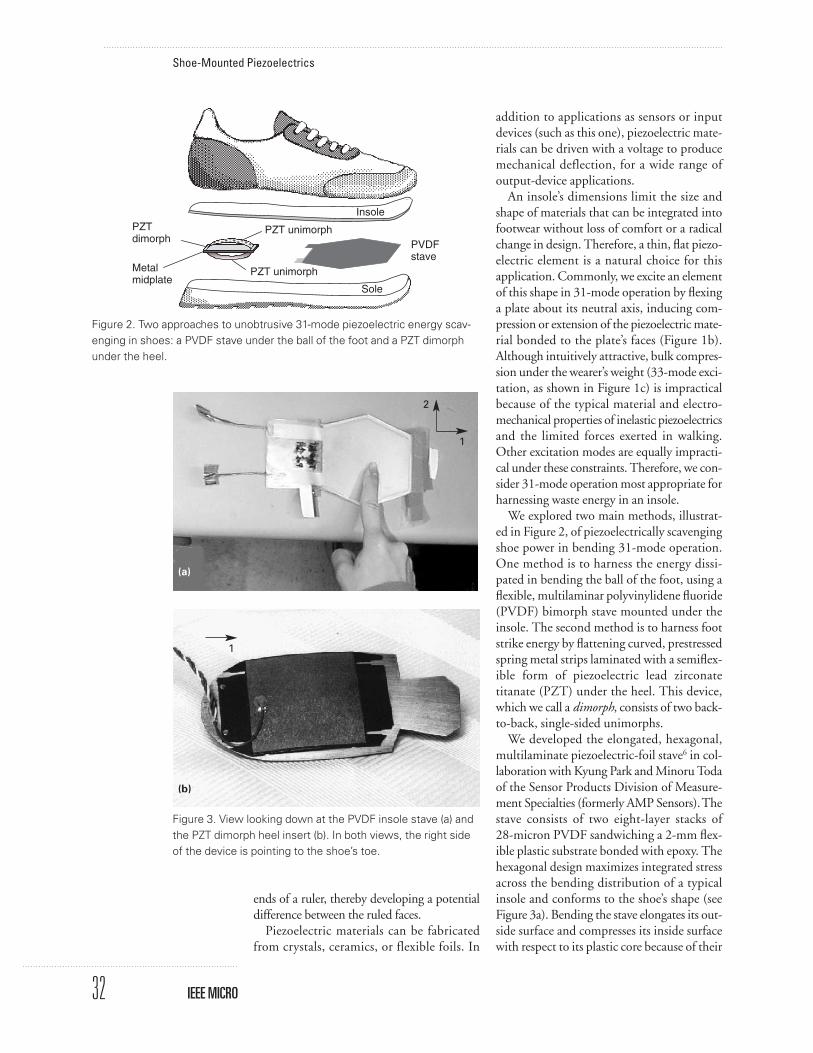
Figure 3. View looking down at the PVDF insole stave (a) andthe PZT dimorph heel insert (b). In both views, the right sideof the device is pointing to the shoe’s toe.
2
1
1
(a)
(b)

different curvature radii. ThePVDF sheets on either side ofthe core are connected appro-priately so the silver elec-trodes on each sheet appear inparallel (flipping polarity onopposite sides as in Figure 1b)and the discrete charge accu-mulations of the 16 layers areadditive. A voltage thereforedevelops across the two leads,supported by the multilami-nate structure’s net 330-nFcapacitance. Restoring thestave’s shape, as well as bend-ing it, liberates energy if theresulting charge is optimallyremoved at each relative min-imum and maximum deflec-tion in the step cycle.
The second device (Figure3b) exploits the abundantenergy exerted in a heel strike.Although we used a simpleunimorph7 in our first model,we later constructed anonbending, compressibledimorph8 in cooperation withthe C.S. Draper Laboratory.It consists of two commer-cially available PZT transduc-ers, a heel-shaped 0.025-inchberyllium-copper midplate,and two aluminum rivets. The insert fits snug-gly into the heel portion of a hollowed ortho-pedic insole, and because its volume andcompressive flexibility closely match the mate-rial removed to accommodate it, its presenceis unnoticeable. We incorporated two Thun-der TH-6R transducers manufactured by FaceInternational Corp. using a semiflexible piezo-ceramic manufacturing process developed byNASA Langley in the Rainbow (reduced andinternally biased oxide wafer) design project.The transducers consist of a 5 × 5-cm, 0.015-inch PZT strip bonded to a prestressed, neu-trally curved, 5 × 8.5-cm sheet of spring steel.We trimmed them to fit the beryllium-coppermidplate, mounted them under the heel-strikeforce center with two rivets, and connectedthem in electrical parallel. As with the PVDFstave, charge develops across the faces of thePZT strips when the dimorph is compressed or
released. Hence, a voltage appears, supportedby the source’s net 140-nF capacitance.
PerformanceTo evaluate and compare the output of the
two shoe generators, we installed and testedthem. We placed the PVDF stave under theinsole of a standard Nike athletic sneaker andthe PZT dimorph in an orthopedic insole ina US Navy work boot. We chose these testplatforms with the devices’ physical charac-teristics in mind: The Nike insole’s flexibilityaccommodated the flexible stave, and thework boot’s rigid heel cup suited the rigiddimorph. Neither device affected the gait,and, with a little padding, both were at mostbarely perceivable during the wearer’s normalactivity. To determine the devices’ approxi-mate raw power and electromechanical effi-ciency, we terminated the transducers with
33MAY–JUNE 2001
0
50
50
100
150
200
<P> = 8.4 mW
|V| = 44 V
0 1 2 3 4 5Time (s)
0 1 2 3 4 5Time (s)
0
10
20
40
60
<P> = 1.3 mW
|V| =9.8 V
Vol
ts (
mW
)V
olts
(m
W)
0
0
(a)
(b)
Figure 4. Power and rectified voltage waveforms from brisk-walking tests of optimally loadedPVDF stave (a) and PZT dimorph (b).

matched resistive loads and measured theirvoltage during a brisk walk. Figure 4 (previouspage) shows the resulting plots.
For the PVDF stave, the average power ina 250-kΩ load at a 0.9-Hz walking pace was1.3 mW. Conversely, the PZT dimorph pro-duced on average 8.4 mW in a 500-kΩ loadunder similar excitation. The footfall charac-teristics are evident in these plots. The largerpower spikes correspond to the device’s rapidinitial bending or compression, and the fol-lowing smaller spikes represent transducerrestoration when the walker more slowly shiftshis weight to the opposite foot. Therefore,both sources alternate polarity with respect tothe source ground twice between steps, yield-ing two distinct current pulses per step cycle.Because of the source voltage’s bipolar nature,rectification is required.
Finally, by comparing the open-circuit volt-age across each device’s known static capaci-tance under a constant test force, we measuredthe raw electromechanical efficiencies asapproximately 0.5 percent for the stave and20 percent for the dimorph. Further, at lowfrequencies, the equivalent circuit for bothtransducers is essentially the device’s staticcapacitance in parallel with a large resistancefor modeling dielectric leakage. This impliesthat the test force must be applied quickly and
the source voltage read immediately to mini-mize deleterious leakage effects on an accu-rate approximation of available energy.
Shoe-powered RF tag systemTo demonstrate the feasibility and utility of
scavenged shoe power, we developed a simpleapplication circuit.7 The design is a self-pow-ered, active radio frequency (RF) tag that trans-mits a short-range, 12-bit wireless identification(ID) code while the bearer walks. This systemhas immediate application in a smart environ-ment, in which multiple users transmit theiridentities to the local surroundings. The IDs,for example, can enable a central server to makedynamic, near-real-time decisions to personal-ize the environment or route appropriate infor-mation to mobile users. Most previous work inthis area relied on battery-powered infrared (IR)badges.9 Our RF-based design, however,requires no line of sight to the reader and there-fore can be mounted in a shoe, operating with-out a battery under the power of a piezoelectricinsert. Figure 5 shows a functional prototypepair of self-powered RFID sneakers.
Figure 6 shows the RF tag system schemat-ic. This design uses scavenged energy fromeither the PVDF or PZT source to encode andtransmit a periodic, On/Off-keyed RFID sig-nal using devices developed for automotivekeyless entry systems. A local base stationreceives the transmission and emits an audiblechirp upon identifying the transmitter. Thesignal from the piezoelectric source is full-waverectified through 500-mA diode bridge D1.As the source signal ramps up, charge transfersto electrolytic bucket capacitor C1 wheneverthe source voltage overcomes the voltagealready supported by this capacitor (plus twodiode drops). As C1 charges beyond 12.6 V(the Z1 breakdown voltage plus the diode dropacross the base-emitter junction of Q1), Q1 isforced into conduction, in turn activating Q2and latching Q1. With Q1 on, the high side ofC1 now has a current return path to groundand discharges through the Maxim MAX666low-dropout (LDO) linear regulator U1.
The regulator is biased to provide a stable +5V to the serial ID encoder U2 and RF trans-mitter U3, as long as C1 has sufficient chargeto produce a valid regulator output voltage(Vout). Note that Vout exhibits some ripple whensupplying the transmitter during the ID code’s
34
Shoe-Mounted Piezoelectrics
IEEE MICRO
Figure 5. Piezoelectric-powered RFID shoes with mounted electronics.

On periods. When Vout swings below approxi-mately 4.5 V (as set by R5 and R6), the low-battery in pin (LBin on U1) is pulled below itsthreshold, driving the low-battery out pin(LBout) to ground momentarily. This negativepulse through C3 turns Q1 Off, thus deacti-vating Q2 and renewing the C1 charging cycle.Note that R1, R2, and R3 bias Q1 and Q2 toshow C1 a very high load impedance when theQ1-Q2 latch is deactivated. Finally, we includ-ed R4 and C2 to better match the load stage tothe charging circuit and source impedance; theremaining resistors support the load stage com-ponents in other ways.
Figure 7 is a representative graph of signalsfrom the power-conditioning circuitry withthe PZT source during a walk. The upper traceshows the voltage across C1 (in this case, 47µF), and the lower trace shows the MAX666linear regulator’s output. Charge accumulateson the bucket capacitor, increasing with eachstep until the capacitor stores enough energy topower the transmitter for roughly half a sec-
ond, generally after three to five steps with thecurrent system. Substituting a high-frequencyswitching regulator for the MAX666 would
35MAY–JUNE 2001
PVDF, PZTpower source
1 Meg
R2
10K
R3
D212 V
VN2222L
Q2
R1510K
R4
C2
500 mAbridge
D1
Gnd
Shtdn
Vset
VinLBout
LBin
Sense
Vout
MAX 666
6
8 2
4
5
3
1
U1 R5
R6
100KR7
0.1 µFC3
NCA0A1A2A3A4A5A6A7GND
NCVdd
DoutOsc1Osc2
TEAD11AD10AD9AD8
HT
12E
/S
123456788
1314
1617181920
10 1112
15
U2
R8
JP11JP10JP9JP8
JP 0-7
Data test
TX-66310 MHz
Antenna+5 V in
Data inGND
U3
C4
Transmit antenna
22-4
7 µF
Q12N3906
7
750K
0.1
µF
1.8
Me
g75
0K
2 µF 1.5
Me
g
enco
der
Inpu
t vol
tage
C1
volta
ge
C1
Reg
ulat
ed s
uppl
y vo
ltage
0
2
4
6
8
10
12
14
Out
put a
nd s
tore
d ca
paci
tor
volta
ges
(vol
ts)
Time (s)
Regulated5-V supply
output
Transmitting Transmitting Transmitting
Voltage onstorage capacitor
(C1 = 47µF)
0 2 4 6 8 10
Figure 6. Schematic of power-conditioning electronics and encoder circuitry for the shoe-powered RF tag system.
Figure 7. Stored voltage (top) and regulated power output (bottom) waveformsfor shoe-powered RFID transmitter while walking.

further improve the efficiency of this circuit;this line of inquiry led to the results summa-rized in the following section.
Exploring high-frequency switching conversion
Despite its novelty, simplicity, and low qui-escent power requirement, the shoe-poweredRF tag system is inherently inefficient. Low-frequency piezoelectric sources are essentiallypurely capacitive, and during walking theyproduce high-voltage, low-energy, low-duty-cycle current pulses at approximately one cycleper second. This excitation profile results inan extremely high source impedance, withvoltage signals in the hundreds of volts andcurrents on the order of 10-7 A. A linear reg-ulation scheme, therefore, is not well suitedto the electrical characteristics of a piezoelec-tric element excited by a brisk walk. For thatreason, we devoted our subsequent researchto finding a more efficient means of convert-ing the raw electric energy produced by thetransducers into a useful form. We exploredvarious switching conversion schemes, includ-ing switched-capacitor converters and directdc-dc down converters. In the end, we devel-oped an offline, forward-switching converter,consisting of a small number of inexpensive,readily available components and materials.
A suitable low-frequency circuit modelequivalent to a piezoelectric source consistsof a capacitor in parallel with a resistor tomodel the dielectric leakage, and a chargesource dependent on mechanical displace-ment to model the energy transduction.Because excitation occurs at such a low fre-quency and because the circuit should pro-vide a stable, low-ripple output voltage, thepower-conditioning system must performlow-pass filtering with an extremely low cor-ner frequency. For that goal, the most efficientapproach would be to discharge the sourcethrough a diode and a matched inductor intothe bucket capacitor, ringing the circuit witheach step. This technique is often used in accharging circuits for capacitors in flash pho-tography systems. At an average 1-Hz walk-ing pace and a 140-nF source capacitance,however, resonant shunting requires an induc-tance on the order of 105 H. Certainly, sucha value is not practical, especially if the deviceis to fit in a shoe.
Techniques for synchronously interrupting aresonant circuit have recently been proposed—for instance, allowing the ringing voltage onthe source capacitance to swing up (or down)after the piezoelectric voltage has peaked (orreached a minimum).10 The resonant frequen-cy is then made independent of the excitationperiod. Although this allows a resonance fre-quency much higher than the 1-Hz walk, anysignificant energy storage advantage could stillrequire an impractically large inductor.
Switching converters are the natural alter-native to resonant shunting because they offertwo distinct advantages over linear systems.First, because they are truly power convertersand not voltage regulators, switching convert-ers are much more efficient when the differ-ence between input and output voltages is large.Second, they function as impedance convertersbecause the average dc output current can belarger than the average dc input current. Fur-ther, we selected the forward-converter topol-ogy because the step-down transformationshows a high reflected impedance to the piezo-electric source when the switch is closed. It alsoreduces switch stresses when the differencebetween input and output voltages is large andallows the simplest gate drive circuitry.
The piezoelectric power system presentedhere has much different characteristics andboundary conditions from those in normalswitching-converter applications. Therefore,using commercially available control ICs wasinappropriate, and much of the theory andpractice common to switcher implementationdidn’t apply. Specifically, the following pointshad particular weight in our converter topol-ogy selection and design:
• A low-frequency piezoelectric source isessentially a capacitor and a parallel chargesource, and Ec = (1/2)CV2 describes theenergy stored on a capacitor. Therefore,it is advantageous to allow the source volt-age to peak before removing the energy.
• The charge liberated per cycle is relative-ly constant under the same peak loadingforce, regardless of frequency.
• Output ripple is dominated by the lowexcitation frequency of walking. There-fore, a large output capacitance (greaterthan 100 µF) is necessary to keep volt-age ripple within acceptable limits.
36
Shoe-Mounted Piezoelectrics
IEEE MICRO

• Duty-cycle control is not an issue—weimplemented switching simply to pro-vide current gain.
• The average source current is very small(approximately 100 nA), so we selectedsemiconductor switches to minimizegate charge, not the drain-to-source Onresistance.
• We chose the switching frequency tominimize system energy loss, specificallyin the transformer, switch control, andgate drive.
• The control circuitry must bootstrapitself from a cold startup; no battery isincluded to start the switching regulator.
Forward-switching converter design and operation
Figure 8 shows a block diagram of our for-ward-switching power-conditioning system.Note that this system has two ground buses—one referenced to the PZT source, the secondto the load. We refer to these ground refer-ences as source ground (SGND) and loadground (LGND). Mg, an n-channel MOS-FET (metal-oxide semiconductor field-effecttransistor), joins the two buses; Mg’s source
connects to SGND and its drain to LGND.Because bucket capacitor Cb is sufficientlydischarged and Z2 is not conducting at start-up, resistor R3 pulls Mg’s gate to SGND. Thisconfiguration assures that SGND and LGNDdo not reference each other at startup and donot do so until Q1 goes into conduction. Thislatching circuit is identical to the one in Fig-ure 6; we recycled it here for bootstrapping.
The source signal is full-wave rectified by adiode bridge (D1 to D4). Because LGND isnot referenced to the source and Q1 is Off atstartup, the only current path available to therectified source signal is through the feed-for-ward loop and into Cb. Diodes Df1, D5, D6,Ds1, and Ds2 prevent Cb from dischargingback through transformer T1 as it charges. Toensure Mf1 is On at startup, we placed Df2 andCff in series on a second feed-forward branchto couple charge onto its gate. Further, Mf2’sgate shares the same node as Mg’s gate (that is,they share the same conduction state), so Mf2is Off at startup and charge accumulates onMf1, holding it On. Note that both Mf1 andMf2 must be low-leakage, high-standoff-voltage devices. It is desirable to minimizesource charge leakage through Mf1 after the
37MAY–JUNE 2001
R1 A+ V+V+ R
A-D Q
Q
QSckB+
B-
A+
THTR
Ct
REF
Ao
Ra
RbBo OUT
V-GND
Rr1 Rr2
Rc1
Rc2
D1 D4
D3 D4
PZTdimorphsource
q(t)
Dp2
Dp1C1
C2
R5
R6
R7
LGND
V+
Cvc
MAX934a
D+V+
D-
C+C-REF
Do
Co
SGND
MAX934b
ICM7555VddU2B
Vss
D Q
RQS
ck
VddU2A
Vss
GND VC Ds
Ds1
Ds2
Ms
P
T1
D5
D5T
S
L1
L2
Df1 Mf1 Mf2
Df1 Cff
Cb
Zb Z2
R3
R4
R2
Q1
Mg
V+
LGND
LGND
SGND
R6
R7
U1B
U1C
R′ SENSELBO
LBISHDN
VinVout
VoutVset
MAX666
GND
Q+
–
Figure 8. Forward-switching converter system.

switcher is operating, and a leaky Mf2 wouldstrip charge off the Mf1 gate during startup.
As Cb charges beyond Z2’s breakdown volt-age plus the diode drop across the Q1 base-emitter junction, Q1 is forced intoconduction, which in turn activates Mf2 andMg. With Mf2 On, Mf1’s gate is pulled toground and current flow through the feed-for-ward loop is blocked in both directions. Mosthigh-standoff-voltage MOSFETs have a bodydiode connected from source to drain, so weincluded Df1 to prevent reverse current flowthrough Mf1. Further, in the On state, Mgreferences LGND to SGND, which will thendiffer only by the voltage drop across the chan-nel. Cb now has a current path through theconditioning circuitry and into the commonground, and the system is activated. LGNDremains a viable current-return path until thevoltage across R3 goes low enough to pinchoff Mg. Adjusting the ratio between R2 andR3 can set the Cb voltage at which this occurs.
Once the control and regulation circuitry isactivated and the direct current path from thesource to the secondary side opens, the onlymeans to transfer energy from the source intoCb is through the transformer and the MOS-FET switch. A peak detector (Dp1, Dp2, C1,and C2) and comparators A and B in theMAX934 IC perform zero-slope peak detec-tion of the source signal. The switcher is acti-vated when the signal reaches its maximumvoltage and deactivated when a low signal isdetected. Further, Ms is held open at startup sothat the transformer will not load the source.R1, Rc1, and Rc2 constitute a very high resis-tance voltage divider (R1 is approximately 100MΩ), and Rr1 and Rr2 divide the referencevoltage (1.182 V) so that the input voltage atpin A− is limited as the source voltageapproaches 300 V. Ao therefore remains Highuntil the source signal voltage reaches the pre-set level and A− becomes greater than A+; theReset pin on FF2 is then set Low. As the inputsignal continues to rise, the voltage drop acrossDp2 holds B− higher than B+, thereby keep-ing Bo Low as C2 charges.
When the slope of the source signal reach-es zero and begins to fall, the voltage acrossC2 is greater than the signal voltage, and thevoltage drop across Dp1 causes the compara-tor to drive the Bo pin High. With Reset Lowand a positive slope edge at the clock input of
U2B, the flip-flop latches Q high, therebysupplying power to the biasing circuitry of theICM7555 CMOS oscillator. In using the Qpin to source this current, we reduce quies-cent losses in the biasing resistors by supply-ing power only when the oscillator is needed.The oscillator will function as long as Q isHigh and the biasing circuitry is powered. Itwill remain High until the input signal fallsbelow the threshold set at A+ and Reset is dri-ven High. Further, feeding Ao into Reset pre-vents the oscillator from being turned Onuntil the input signal reaches the A+ thresh-old, regardless of the source signal. This con-vention prevents small signals, such as theones produced by weight shifts on the insole,from inadvertently activating the switcher.Rc1, Rc2, and C1 bias and filter the signalinto the B−/B+ peak detector. We selectedthese values experimentally, and the circuitbehaves somewhat erratically without them.
The forward-converter switcher conven-tionally operates at or near a 50 percent dutycycle to minimize switch stress and core loss-es (this regulator circuit8 achieves optimal per-formance at a 25-kHz switching frequency).However, biasing-circuitry losses approach amaximum as the duty cycle goes to 50 per-cent using the 7555 timer in this standardastable configuration. Simply, the Rb/Ra ratioshould be made as small as practical to mini-mize losses, but it is impossible to reduce thisratio and approach a 50 percent duty cyclesimultaneously. To address this quandary, weused a second D flip-flop to establish a per-fect 50 percent duty-cycle square wave anddrive the gate of the n-channel MOSFETswitch Ms. We could then minimize theRb/Ra ratio and use the 7555 to supplymomentary trigger pulses to the flip-flop.
Therefore, at the peak of every current pulsefrom the dimorph source, the gate drive cir-cuit switches an exponentially decaying sourceenvelope through the step-down transformerT1 and into the storage stage. The T1 primaryis coupled into two windings with the sameturn ratio, N. S is the secondary winding, andtertiary winding T is inverted with respect toSGND. We use T to reset the magnetic fluxthrough the transformer core during switchOff periods, transferring the magnetizationenergy into Cb.
Following D5 and D6 are filter inductors
38
Shoe-Mounted Piezoelectrics
IEEE MICRO

and freewheeling diodes for both low-sidewindings. L1 (and L2 on the tertiary) and Cbform a second-order filter, normally imple-mented to reduce the high-frequency ripple atthe output. In this design, the filter must con-tend with the source’s dominant 1-Hz excita-tion frequency. The inductors therefore operatediscontinuously and do little to filter the dom-inant ripple. We included them merely to sup-port the voltage difference between Cb and thetransformed source when the switch is closed.The bucket capacitor is large enough to sustainan operable voltage between each current pulse(as shown in Figure 9a), and Zb protects thecontrol circuitry if the voltage on Cb approach-es the supply rating of the CMOS logic.
The final stage is for load switching. In thisstage, two comparators and a NAND Set/Resetlatch sense V+ and provide hysteresis in theLDO linear regulator’s On/Off control. Thiscombination provides a regulated output volt-age, prevents Cb from draining completely, andthereby reduces the number of slow boot-strapped restarts. Hysteresis is importantbecause it prevents jitter or oscillation in loadstage control and allows low-duty-cycle opera-tion, as shown in Figure 9b, if a load demandshigher power than the system provides.
Compared with the simple scheme of Fig-ure 6, the switching converter proved a bet-ter means of conditioning power harvestedfrom piezoelectric sources, although its effi-ciency was not as high as we anticipated. Fig-ure 9a shows that the forward converter cansupply at least 1.3 mW continuously at awalking pace of 0.8 Hz. Comparing this withthe dimorph source’s raw power (8.4 mW at1.1 Hz) and normalizing with respect to acommon frequency, we found that the con-verter’s electrical efficiency is 17.6 percent.This result is better than twice the original lin-ear regulator’s efficiency using the same sourceand bucket capacitor.7 More important, theswitching-converter system provides electricpower continuously during walking, arequirement of many potential applications.
Related work and future developmentsResearch is necessary in a few areas to
enhance the efficiency and output of the twoshoe-power-harvesting systems presented here.For better performance from the switching reg-ulator, several electrical design factors need clos-
er examination. The switching converter incurslosses in the transformer core and switchingMOSFET. We could reduce these losses byusing components tailored to micropower sig-nals. Finally, applying soft-switching techniquesand developing an optimal circuit layout wouldfurther reduce electrical system overhead.
Without straying from the relative sim-plicity of low-frequency passive excitation, thelogical next steps for the piezoelectric shoepower system are refining the transformer andFET switch designs and developing an inte-grated circuit to perform control. Commer-cially available high-voltage FETs are built forhigh-current applications. They have rela-tively high gate charge requirements, and thegate drive dissipates a large portion of a piezo-electric source’s power even at low frequen-cies. The most important enhancementtherefore is to optimize the switching transis-tor for high voltages but very small currents.Further, placing the control on an IC wouldreduce losses associated with coupling multi-
39MAY–JUNE 2001
Time (s)
2.0-mW load5
4
3
2
1
0
Vol
ts
0 1 2 3 4 5
Vout
VCb
Time (s)
1.3-mW load
5
6
4
3
2
1
0
Vol
ts
0 1 2 3 4 5
Vout
VCb
(0.01)x
Vsource
(a)
(b)
Figure 9. Switching converter signals for a continuous 1.3-mWload (a) and a 2.0-mW load (b), showing low-voltage shut-down. Both examples resulted from walking with the PZTdimorph source, represented in the bottom plot of (a).

ple discrete components and force the devel-opment of an optimal layout. Layout is oftenjust as important as component selection tothe performance of a switching converter. Abetter layout could reduce switching noise andeliminate stray resonances that degrade thediscrete design’s performance.
Of prime importance in obtaining betterperformance is improving the mechanics ofexciting the transducer from foot dynamics.An aspect not fully addressed here is the phys-ical impedance match between foot and trans-ducer. We selected the piezoelectric elements’dimensions and mechanical braces to balancecomfort and energy transfer, but a more rig-orous study, depending on specific applica-tions, is needed. Also, piezoelectric elementshave been used for many years to activelydamp the high-frequency mechanical vibra-tions. We could apply those relationships inreverse by artificially exciting the material nearits mechanical resonance and against the forceof the downward footstep, liberating a largernet electrical energy.
Cyclic mechanical excitation near the mate-rial’s resonant frequency can make a piezo-electric element undergo many efficientcharge/discharge cycles during a single heelstrike. As a result, the element would producemuch more energy, potentially extracting a fewwatts of power from a heel strike.11 Thisscheme is mechanically more complicated thanthe simple insole mounting schemes shownearlier in Figure 2, making the piezoelectricgenerators too large to be easily embedded.
Developers in the United Kingdom havereported on recent experiments using a bootwith inserted piezoelectric crystals,12 and
approaches of this sort have been explored formobile medical applications.4 The power out-put of these devices is said to be more than anorder of magnitude beyond the levels pre-sented in this article. But conventional piezo-electric crystals and ceramics are much stifferthan the materials used in our generators,potentially requiring a hard-hit excitationthrough a mechanical linkage or indirect exci-tation through modulated hydraulics.4,11
These techniques would possibly impact thelook and feel of the shoe, as well as the gener-ator’s longevity and mechanical complexity.
Other proposed designs use electroactivepolymers to achieve a similar level of power,with the generator (a rubbery dielectric mater-ial) mounted in the compressible heel of theshoe.13 These designs require a very high poten-tial (such as several kilovolts) to be applied acrossthe dielectric (because current is produced asthe material is compressed and its capacitancechanges). Hence, achieving efficient power con-ditioning is challenging in these systems.
Moving-magnet systems likewise involvea more complicated integration,14 but theycan become competitive because of theirhigh efficiency and well-established tech-nology. As an example, we conducted a sim-ple test of a foot-mounted rotary generator.7
Our device significantly hampered the wear-er’s gait because of its primitive mechanicallinkage. However, it generated an average of250 mW, two orders of magnitude higherthan the results from the piezoelectric sys-tems presented here.
We further explored integrating the mag-netic generators and their associated mechan-ics into the shoe sole itself.15 Figure 10 showsan example that generated approximately 60mW of average power. Adding mechanicalenergy storage, such as a clock spring, wouldallow more energy to be harvested per foot-fall (driving the generator continuouslybetween steps), increasing the resulting powerto about one watt. Their abundant movingparts, high gear ratios, and intrinsic complex-ity, however, can make these devices fragileand expensive. Better engineering—for exam-ple, driving a magnetic generator via ahydraulic link to reservoirs compressing withthe sole16—can produce a longer-lived devicethat generates considerably more power thanour piezoelectric sources.
40
Shoe-Mounted Piezoelectrics
IEEE MICRO
Figure 10. Pair of rotary magnetic generators embedded in asneaker sole with step-up gear mechanisms.

After improving the shoe-generatordesigns, we must integrate them with
useful body-worn systems. The RFID trans-mitter is one example of a simple and practi-cal application of scavenged shoe power.However, at such low power levels, embeddedbatteries might be a viable (but environmen-tally unfriendly) alternative, depending on thefrequency of use and product lifetime. Otherpossibilities include a personal positioning sys-tem for military or police units, a personalnavigator or smart pedometer, a data collec-tion tool for monitoring an athlete’s move-ments, and a child-tracking device. There arecountless other potential applications.
As the power yield increases and wearable elec-tronics become more efficient, foot-poweredenergy-harvesting systems can drive more com-ponents of wearable computers, eliminating theneed for batteries or enabling them to be charged“on the hoof.” These systems would open a hostof applications in situations where power gridaccess is often unavailable, such as extended hik-ing expeditions or military missions.
As applications increase, so should ease ofuse. The piezoelectric insole and conditioningelectronics could be marketed as separate com-ponents to be modularly linked to electronicsembedded in the heel via a weatherproof con-nector. As insoles wore out, consumers wouldreplace or upgrade them. With appropriateadaptations, shoe-mounted energy-scaveng-ing systems are likely to power a wide range ofbody-worn devices. MICRO
AcknowledgmentsWe are grateful to our MIT Media Lab col-
laborators Jake Kendall, John Kymissis, and NeilGershenfeld of the Physics and Media Group.We also thank our associates in the Media Lab’ssponsor community, in particular Kyung Parkand Minoru Toda at the Sensor Products Divi-sion of Measurement Specialties (formerly AMPSensors) for working with us on the design ofthe PVDF stave and providing the foil. Weacknowledge helpful and interesting discussionswith many other research colleagues, especiallyRobert Nowak of the Defense AdvancedResearch Projects Agency and Nesbit Hagoodof MIT. We appreciate the support of theThings That Think Consortium and our othersponsors at the MIT Media Laboratory.
Nathan Shenck is grateful to the C.S. Drap-
er Laboratory in Cambridge, Mass., for theopportunity to study at MIT as a Draper Fel-low while conducting research at CSDL andthe MIT Media Lab. He acknowledges the USNavy for granting him a two-year leave of ser-vice to pursue graduate education. He alsothanks John Sweeney, Richard Gardener, andPaul Rosenstrach for guidance and support atCSDL.
References1. T. Starner, “Human Powered Wearable
Computing,” IBM Systems J., vol. 35, nos.3 and 4, 1996, pp. 618-629.
2. J.P. Marsden and S.R. Montgomery, “Plan-tar Power for Arm Prosthesis Using BodyWeight Transfer,” Human Locomotor Engi-neering, Inst. Mechanical Engineers Press,London, 1971, pp. 277-282.
3. R. Fletcher, “Force Transduction Materials forHuman-Technology Interface,” IBM SystemsJ., vol. 35, nos. 3 and 4, 1996, pp. 630-638.
4. J.F. Antaki et al., “A Gait Powered Autolo-gous Battery Charging System for ArtificialOrgans,” Proc. 1995 American Society ofArtificial Internal Organs Conf., LippincottWilliams & Wilkins, Philadelphia, 1995, pp. M588-M595.
5. “Piezoelectric Tutorial,” Piezo Systems, Cam-bridge, Mass.; http://www.piezo.com/intro.html.
6. C.J. Kendall, Parasitic Power Collection inShoe-Mounted Devices, BS thesis, Dept. ofPhysics and MIT Media Laboratory, Massa-chusetts Institute of Technology, Cam-bridge, Mass., June 1998.
7. J. Kymissis et al., “Parasitic Power Harvest-ing in Shoes,” Second IEEE Int’l Conf. Wear-able Computing, IEEE CS Press, LosAlamitos, Calif., 1998, pp. 132-139.
8. N. Shenck, A Demonstration of Useful Elec-tric Energy Generation from Piezoceramicsin a Shoe, MS thesis, Dept. of Electrical Engi-neering and Computer Science, Massachu-setts Institute of Technology, Cambridge,Mass., 1999.
9. R. Want et al., “The Active Badge LocationSystem,” ACM Trans. Information Systems,vol. 10, no. 1, Jan. 1992, pp. 91-102.
10. P. Smalser, Power Transfer of PiezoelectricGenerated Energy, US patent 5703474,Patent and Trademark Office, Washington,D.C., 1997.
41MAY–JUNE 2001

11. N. Hagood et al., “Development of Micro-Hydraulic Transducer Technology,” Proc.10th Int’l Conf. Adaptive Structures andTechnologies, Technomic Publishing, Lan-caster, Penn., 1999, pp. 71-81.
12. J. Drake, “The Greatest Shoe on Earth,”Wired, vol. 9, no. 2, Feb. 2001, pp. 90-100.
13. R.E. Pelrine, R.D. Kornbluh, and J.P. Joseph,“Electrostriction of Polymer Dielectrics withCompliant Electrodes as a Means of Actua-tion,” Sensors and Actuators A: Physical,vol. 64, no. 1, 1998, pp.77-85.
14. N. Lakic, Inflatable Boot Liner with ElectricalGenerator and Heater, US patent 4845338,Patent and Trademark Office, Washington,D.C., 1989.
15. J. Hayashida, Unobtrusive Integration ofMagnetic Generator Systems into CommonFootwear, BS thesis, Dept. of Electrical Engi-neering and MIT Media Laboratory, Massa-chusetts Institute of Technology, Cambridge,Mass., 2000.
16. E. Tkaczyk, “Technology Summary,” Prospec-tor IX: Human-Powered Systems Technolo-gies, M.F. Rose, ed., Space Power Institute,Auburn Univ., Auburn, Ala., 1997, pp. 38-43.
Nathan S. Shenck is a submarine lieutenanton the USS Philadelphia, stationed in Gro-ton, Connecticut. While not at sea, he enjoysinvestigating alternative energy sources andresearching wireless technology. Shenck has aBS in electrical engineering from the USNaval Academy and an MS in electrical engi-neering from MIT.
Joseph A. Paradiso is a principal research sci-entist at the MIT Media Laboratory, wherehe leads the Responsive Environments Groupand is the Technology Director of the ThingsThat Think Consortium. In earlier work, hedeveloped high-energy physics detectors,spacecraft control algorithms, and various sen-sor systems. Paradiso has a BS in electricalengineering and physics from Tufts Universi-ty and a PhD in physics from MIT, where hewas a Compton Fellow. He is a member of theIEEE, AIAA, ACM, and APS.
Direct questions and comments about thisarticle to Joseph A. Paradiso, Responsive Envi-ronments Group, MIT Media Laboratory,Cambridge, MA 02139; [email protected].
42
Shoe-Mounted Piezoelectrics
IEEE MICRO
Next-generation coursesfor the
next
generation
of computer
professionals
Influence what our
students learn. Review the
latest draft of Computing Curricula 2001.
http://computer.org/education/curricula2001
Prepared by the
IEEE Computer Society/ACM joint task force
on Computing Curricula 2001