En Route to Robot Safety - Amazon S3 · available for detailed safety requirements. Both parts are...
4
Robotics Industry As the efficiency of robot applications generally increases, the closer human and machine are able to work together. Static safeguards are increasingly reaching their limits. The trend is moving away from full enclosures for robot cells in favour of human-robot collaborations (HRC), which manage without guards where possible, but still guarantee operator safety. In practice, each application requires a separate safety- related assessment. Robots are classed as partly completed machinery in terms of the Machinery Directive. The two standards ISO 10218 “Safety of Industrial Robots” Part 1: “Robots” and Part 2: “Robot systems and integration” are available for detailed safety requirements. Both parts are published as EN ISO 10218- 1:2011 and EN ISO 10218-2:2011 and are listed as harmonised C standards under the Machinery Directive 2006/42/EC. Part 2: “Robot systems and integration” also contains information on collaborative operation, and there is an accepted de facto requirement for all safety functions to meet Category 3 / PL d of EN ISO 13849-1. When planning an HRC application, robot selection is an important element for the systems integrator. Various methods can be applied to verify and validate safety requirements, including visual inspections, practical tests and measurements. The systems integrator has to verify or validate over 200 points in all. The status of the standards is clear, therefore. In practice, however, the question remains as to whether an HRC can be implemented safely with this standards framework. There is some guidance found in HSE’s guidance document HSG43. The Technical Specification ISO/TS 15066: “Robots and Robotic Devices – Collaborative industrial robots” is intended to demonstrate the ways forward and is due for publication by the end of 2015. Steps toward a safe HRC application When the normative specifications are implemented, the fact that robot cells are classified as a machine under the Machinery Directive means that each step of the conformity assessment procedure must be completed. It should be noted that the robot itself is only regarded as partly completed machinery; it is not until the end effector or the necessary tool for the respective application is in place that the robot achieves a specific purpose and must then be regarded as final machinery. The integrator or user becomes the manufacturer of the machinery and is responsible for the safety-related inspection, including CE marking. En Route to Robot Safety White Paper - Robotics Industry The efficiency of robot applications increases, the closer human and machine are able to work together.
Transcript of En Route to Robot Safety - Amazon S3 · available for detailed safety requirements. Both parts are...

Robotics Industry
As the efficiency of robot applications generally increases, the closer human and machine are able to work together. Static safeguards are increasingly reaching their limits. The trend is moving away from full enclosures for robot cells in favour of human-robot collaborations (HRC), which manage without guards where possible, but still guarantee operator safety. In practice, each application requires a separate safety-related assessment.
Robots are classed as partly
completed machinery in terms of
the Machinery Directive. The two
standards ISO 10218 “Safety of
Industrial Robots” Part 1:
“Robots” and Part 2: “Robot
systems and integration” are
available for detailed safety
requirements. Both parts are
published as EN ISO 10218-
1:2011 and EN ISO 10218-2:2011
and are listed as harmonised C
standards under the Machinery
Directive 2006/42/EC. Part 2:
“Robot systems and integration”
also contains information on
collaborative operation, and there
is an accepted de facto
requirement for all safety
functions to meet Category 3 / PL
d of EN ISO 13849-1.
When planning an HRC
application, robot selection is an
important element for the systems
integrator. Various methods can
be applied to verify and validate
safety requirements, including
visual inspections, practical tests
and measurements. The systems
integrator has to verify or validate
over 200 points in all. The status
of the standards is clear,
therefore. In practice, however,
the question remains as to
whether an HRC can be
implemented safely with this
standards framework.
There is some guidance found in
HSE’s guidance document
HSG43. The Technical
Specification ISO/TS 15066:
“Robots and Robotic Devices –
Collaborative industrial robots” is
intended to demonstrate the ways
forward and is due for publication
by the end of 2015.
Steps toward a safe HRC application
When the normative specifications
are implemented, the fact that
robot cells are classified as a
machine under the Machinery
Directive means that each step of
the conformity assessment
procedure must be completed. It
should be noted that the robot
itself is only regarded as partly
completed machinery; it is not
until the end effector or the
necessary tool for the respective
application is in place that the
robot achieves a specific purpose
and must then be regarded as
final machinery. The integrator or
user becomes the manufacturer of
the machinery and is responsible
for the safety-related inspection,
including CE marking.
En Route to Robot Safety
White Paper - Robotics Industry
The efficiency of robot applications increases, the closer human and machine are
able to work together.

Sophisticated solutions for press retrofit increase availabilityEn Route to Robot Safety
White Paper - Robotics Industry
One of the most important points
en route to achieving a safe robot
application is to produce a risk
analysis in accordance with
EN ISO 12100. On robot
applications, the challenge for the
“risk assessment” is the
dissolution of the boundaries
between what used to be clearly
separate work areas for human
and machine. The operator’s
movement must be considered in
addition to the hazards emanating
from the robot. However, these
cannot always be calculated in
terms of speed, reflexes or the
sudden approach of additional
people.
Based on the risk analysis, the
next steps are the “safety
concept” and “safety design”,
including component selection.
The results from the “risk
analysis” and “safety concept” are
used to document the selected
safety measures in the “risk
assessment” and to implement
these in the “system
implementation”. This is followed
by the “validation”, in which the
previous steps are re-examined.
Validation is essential for proving
that machines are safe.
The checklists in EN ISO 10218-2
provide additional guidance for
robot applications. By attaching
the CE mark, the integrator
ultimately confirms that the robot
cell and its assured properties
meet all the legal requirements of
the Machinery Directive 2006/42/
EC when used in accordance with
its intended purpose.
Selection of robot and safety components
A wide range of robot systems is
available on the market, which are
suitable for various application
areas. Although they form the
basis of a safe robot application,
a safety-related assessment of
the application and any additional
components and systems is
always required in order to
implement a safe HRC.
In future we will need safety
systems that are considerably
more intelligent so that work areas
in which human and machine
collaborate can be designed
safely, even without guards. These
systems may be part of the actual
robot control system, for
calculating the robot’s movements
safely for example. This enables
the path of the robot arm to be
calculated in advance. In many
cases however, safe motion
functions such as these will not
be enough to achieve the safety
objective. Combinations will often
be needed, which will include
near-field protection (e.g. tactile
safety sensors, such as those
exhibited by Pilz at the
Automatica exhibition in June
2014), personal protection
equipment (safety goggles and
clothing) and safe sensor
technology for monitoring the
detection zone, such as the safe
3D camera system SafetyEYE
from Pilz, for example. This is able
to monitor warning and detection
zones safely in 3D.
Integration of sensor, control and
actuator technology opens up
new freedoms when it comes to
planning dynamic process cycles
and work areas in which human
and robot interact safely.
Ultimately a safe HRC application
is the result of several factors:
interplay between normative
framework conditions and a
complex risk analysis on this
HRC requires intelligent safe control systems such as the 3D camera system
SafetyEYE

White Paper - Robotics Industry
basis, selection of a robot with the
relevant safety functions,
selection of appropriate,
additional safety components and
finally, validation through a
systems integrator.
The development of new
technologies for safe human-
robot interaction is one of the key
research areas at Fraunhofer IFF.
Seven years ago they launched a
research project in which a
service robot was developed for
fetch and carry services in
laboratories in life science
companies. It very quickly
became clear that human-robot
collaboration within the same
workspace will only be possible if
the issue of safety plays a central
role, open questions are resolved
and new technologies are
developed. The human must not
be injured by the robot. A
distinction is made between hard
safety and soft safety.
Hard safety is defined as
technologies that comply with the
safety requirements from the
standards and can be certified.
These are technologies such as
tactile sensor technology for
detecting contact between human
and robot, as well as other
technologies for detecting
approach such as the SafetyEYE,
and for the restriction of speed
and force.
Technologies that help to create
higher acceptance and simplify
interaction between humans and
robots, such as the projection of
warning and detection zones on
to the workspace around the
robot, are regarded as soft safety.
This is of particular interest with
dynamic warning and detection
zones, which are calculated online
based on robot movements.
The main areas for HRC in the
future will be in industrial
applications; and not just in the
field of small robots but also on
high load systems. But there will
be some challenges with regard
to safety; firstly, there isn’t one
safe robot or one safe sensor
technology that covers every
eventuality, in terms of safety.
There will be a range of
technologies and these must
safety certified. It’s the job of the
integrator to describe the hazards
and implement solutions, based
on a risk analysis. For example,
contact with humans should be
ruled out generally where there
are hot workpieces or sharp tools.
In this case it makes sense to
detect the coming together of
human and robot using tactile
floors, laser scanners or camera
systems. It depends on the
respective scenario and
environment.
Practical guidance for system integrators
To simplify implementation of the
normative specifications for
human-robot collaborations (HRC)
and demonstrate the ways
forward, the international
standards committee ISO/TC 184/
SC2 WG3 was tasked with
developing a Technical
Specification (TS). As a member
of this international standards
committee, Pilz is working actively
with robot manufacturers,
integrators, notified bodies such
as BG and other automation
companies to formulate this
specification.
The current draft ISO/TS 15066
“Robots and Robotic Devices –
Collaborative industrial robots”
substantiates solutions for safe
human-robot collaboration in an
industrial environment. A body
area model has been defined in
the Annex to the Technical
Specification (TS). The model
defines points in the
corresponding body areas, with
details of the respective pain
threshold. Once ISO/TS 15066
has been published, these pain
threshold values can be applied
as validation for safe HRC. The
Via software, warning zones and detection zones can be configured quickly and
easily on the PC using the SafetyEYE Configurator.
Pilz Automation Technology
3 Little Colliers Field, Corby, Northants, NN18 8TJ
Tel: +444 (0)1536 460766 Fax: +44 (0)1536 460866
[email protected], www.pilz.com
White Paper - Robotics Industry
body area model provides details
of the respective pain threshold
for each part of the body (e.g. on
the head, hand, arm or leg), which
marks the start of the pain
threshold. If the application
remains within these thresholds
during any encounter between
human and robot, then it complies
with the standard. The Technical
Specification currently has the
status of Committee Draft.
Publication is planned for the end
of 2015.
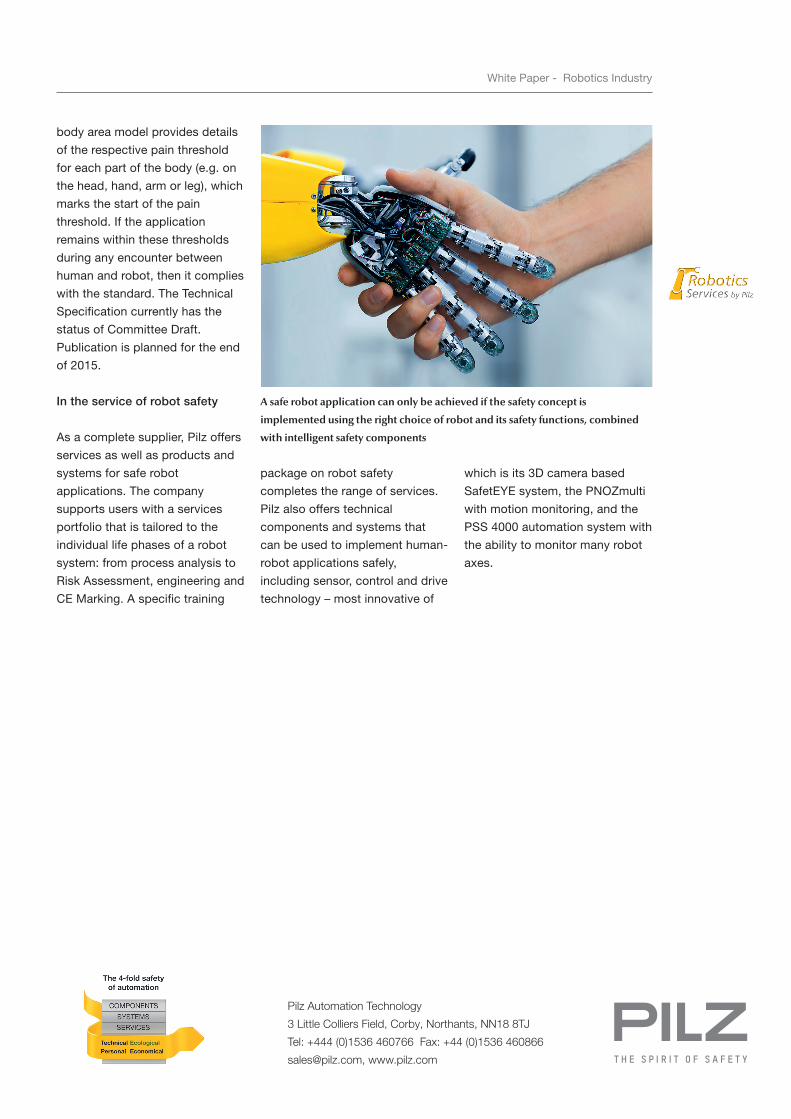
In the service of robot safety
As a complete supplier, Pilz offers
services as well as products and
systems for safe robot
applications. The company
supports users with a services
portfolio that is tailored to the
individual life phases of a robot
system: from process analysis to
Risk Assessment, engineering and
CE Marking. A specific training
package on robot safety
completes the range of services.
Pilz also offers technical
components and systems that
can be used to implement human-
robot applications safely,
including sensor, control and drive
technology – most innovative of
which is its 3D camera based
SafetEYE system, the PNOZmulti
with motion monitoring, and the
PSS 4000 automation system with
the ability to monitor many robot
axes.
A safe robot application can only be achieved if the safety concept is
implemented using the right choice of robot and its safety functions, combined
with intelligent safety components