Embodied Kismet
37
Sociable Robots Peeping into the Human World
-
Upload
padmashri-rokade -
Category
Documents
-
view
226 -
download
0
Transcript of Embodied Kismet
8/6/2019 Embodied Kismet
http://slidepdf.com/reader/full/embodied-kismet 1/37
Sociable RobotsPeeping into the Human World
8/6/2019 Embodied Kismet
http://slidepdf.com/reader/full/embodied-kismet 2/37
An Infant’s Advantages
Non-hostile environment
Actively benevolent, empathic caregiver
Co-exists with mature version of self

8/6/2019 Embodied Kismet
http://slidepdf.com/reader/full/embodied-kismet 3/37
Baby Scheme
Physical form can evoke nurturing response
Caregiver exaggerates voice, gestures
8/6/2019 Embodied Kismet
http://slidepdf.com/reader/full/embodied-kismet 4/37
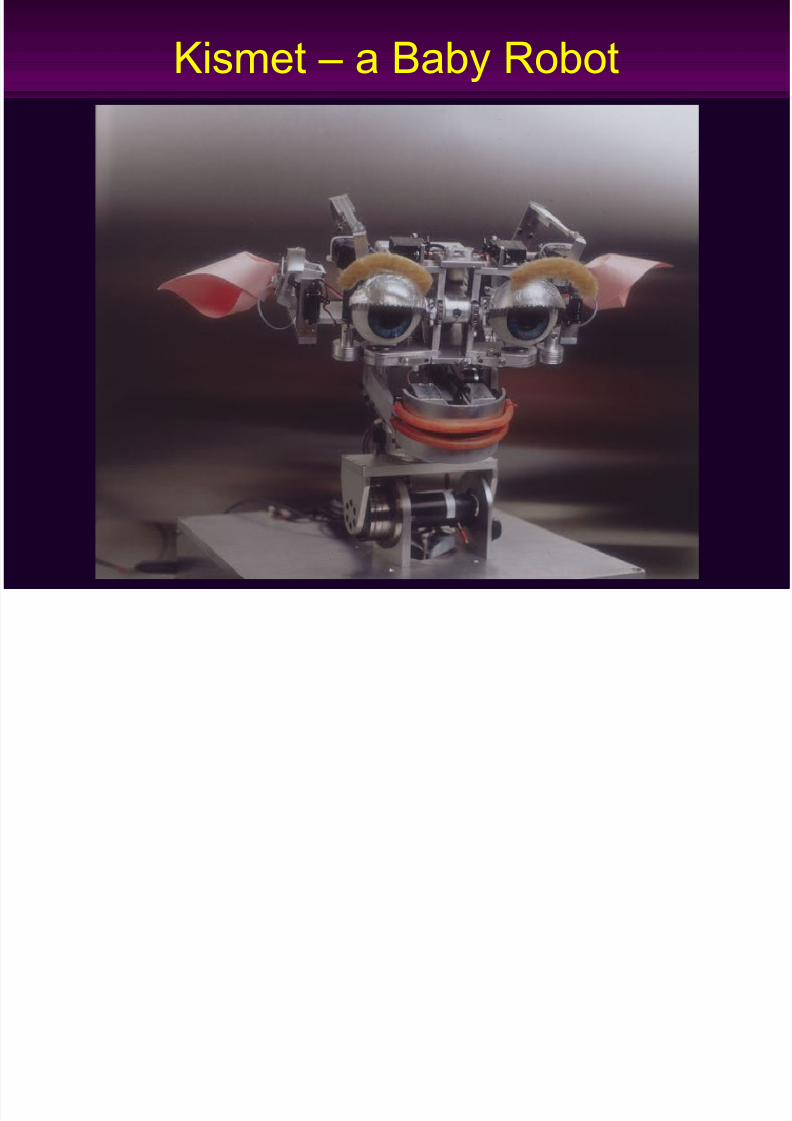
Kismet – a Baby Robot
8/6/2019 Embodied Kismet
http://slidepdf.com/reader/full/embodied-kismet 5/37
Requirements
Robot needs to perceive human state
– Computer vision, speech processing
Human needs to perceive robot state
– Animatronics, speech generation
Closed loop interaction requires both
directions
8/6/2019 Embodied Kismet
http://slidepdf.com/reader/full/embodied-kismet 6/37
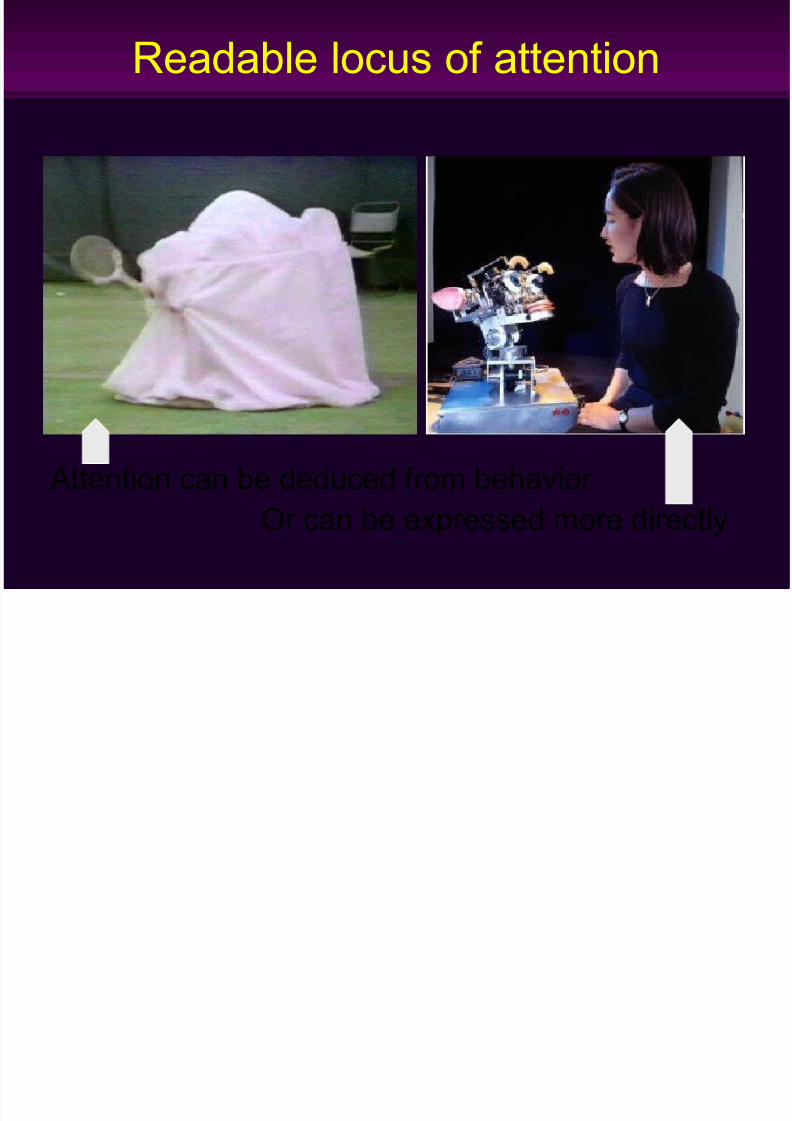
Attention can be deduced from behavior
Or can be expressed more directly
Readable locus of attention
8/6/2019 Embodied Kismet
http://slidepdf.com/reader/full/embodied-kismet 7/37
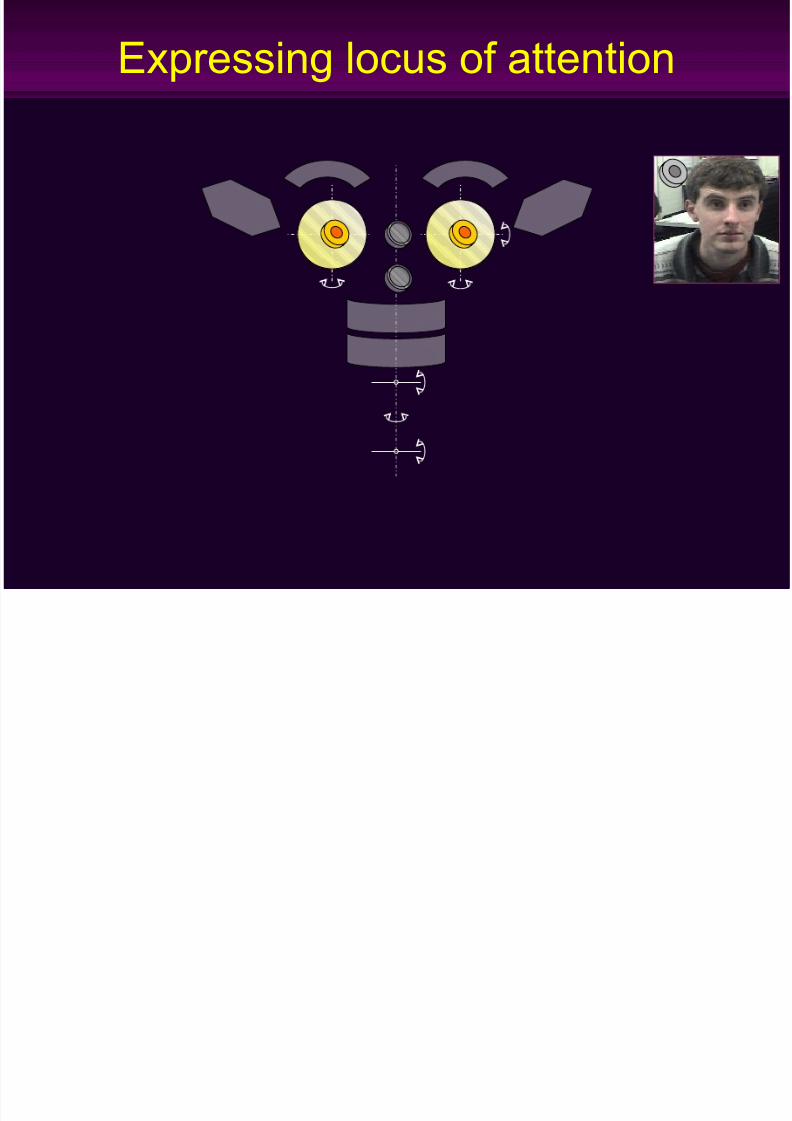
Expressing locus of attention
8/6/2019 Embodied Kismet
http://slidepdf.com/reader/full/embodied-kismet 8/37
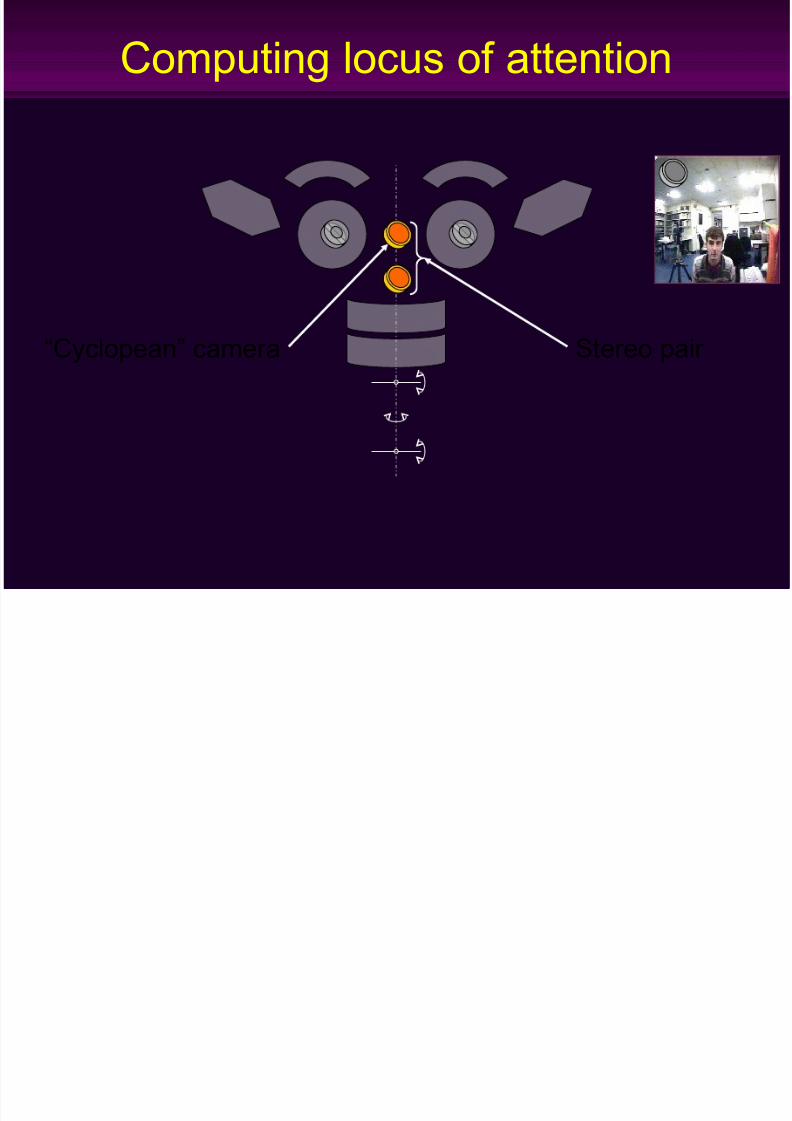
Computing locus of attention
“Cyclopean” camera Stereo pair

8/6/2019 Embodied Kismet
http://slidepdf.com/reader/full/embodied-kismet 9/37
Computing locus of attention
Visual input Pre-attentive filters Saliency map Pursuit
Eye movementBehavior system
Modulatory influence
Primary information flow
(Cyclopean camera)

8/6/2019 Embodied Kismet
http://slidepdf.com/reader/full/embodied-kismet 10/37
Looking Preference
“Seek face” –high skin gain, low color saliency gain
Looking time 80% face, 20% block
“Seek toy” –low skin gain, high saturated-color gain
Looking time 28% face, 72% block
Internal influences bias how salience is measured
The robot is not a slave to its environment
Prefers behaviorally relevant stimuli
8/6/2019 Embodied Kismet
http://slidepdf.com/reader/full/embodied-kismet 11/37
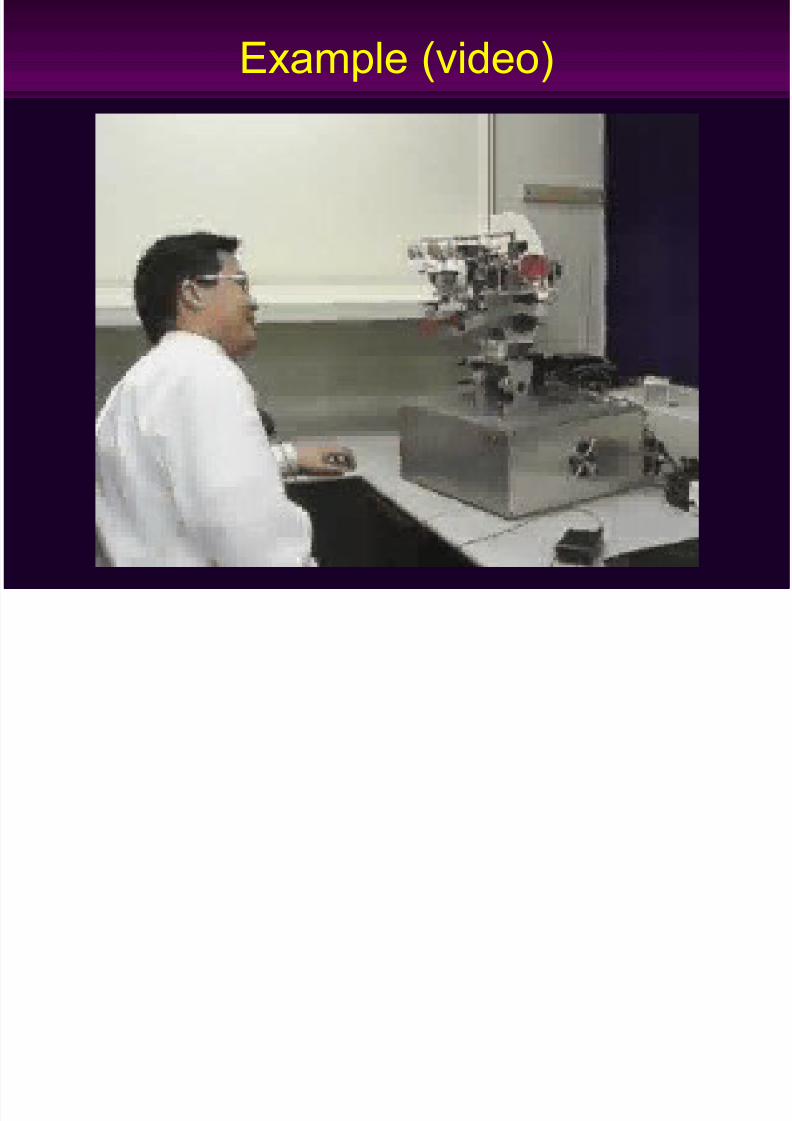
Example (video)
8/6/2019 Embodied Kismet
http://slidepdf.com/reader/full/embodied-kismet 12/37
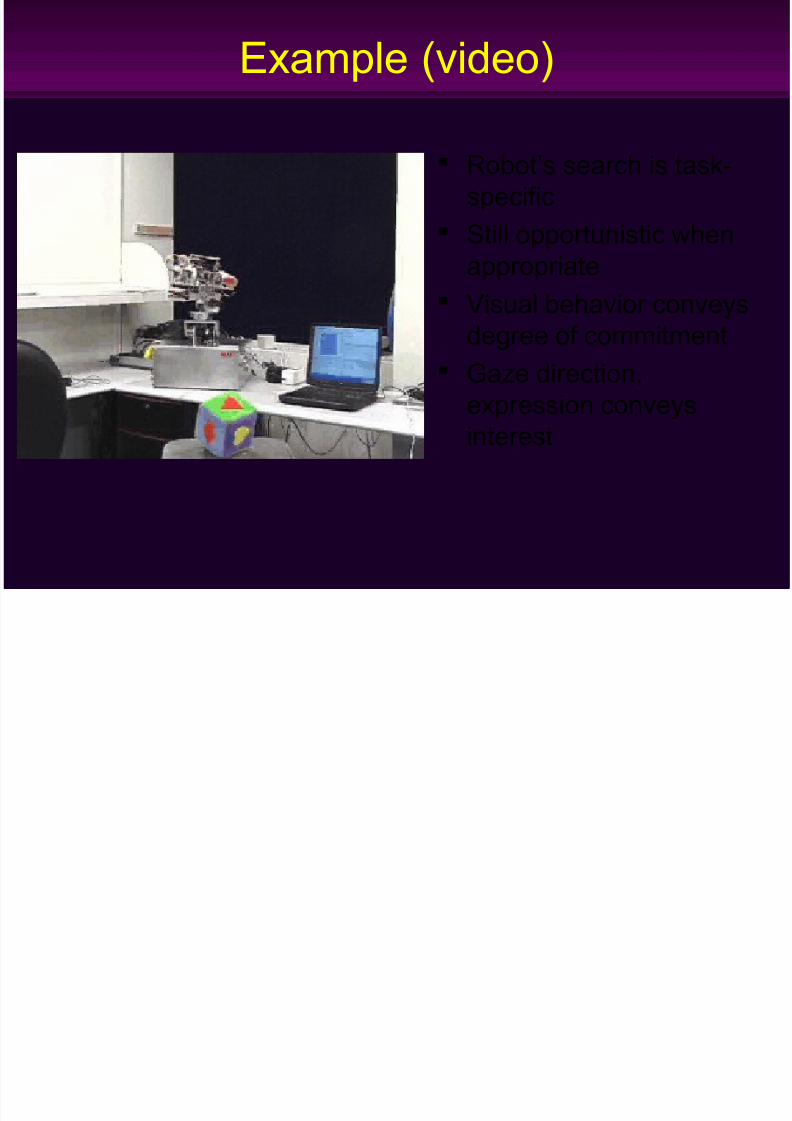
Example (video)
Robot’s search is task-
specific
Still opportunistic when
appropriate Visual behavior conveys
degree of commitment
Gaze direction,
expression conveysinterest

8/6/2019 Embodied Kismet
http://slidepdf.com/reader/full/embodied-kismet 13/37
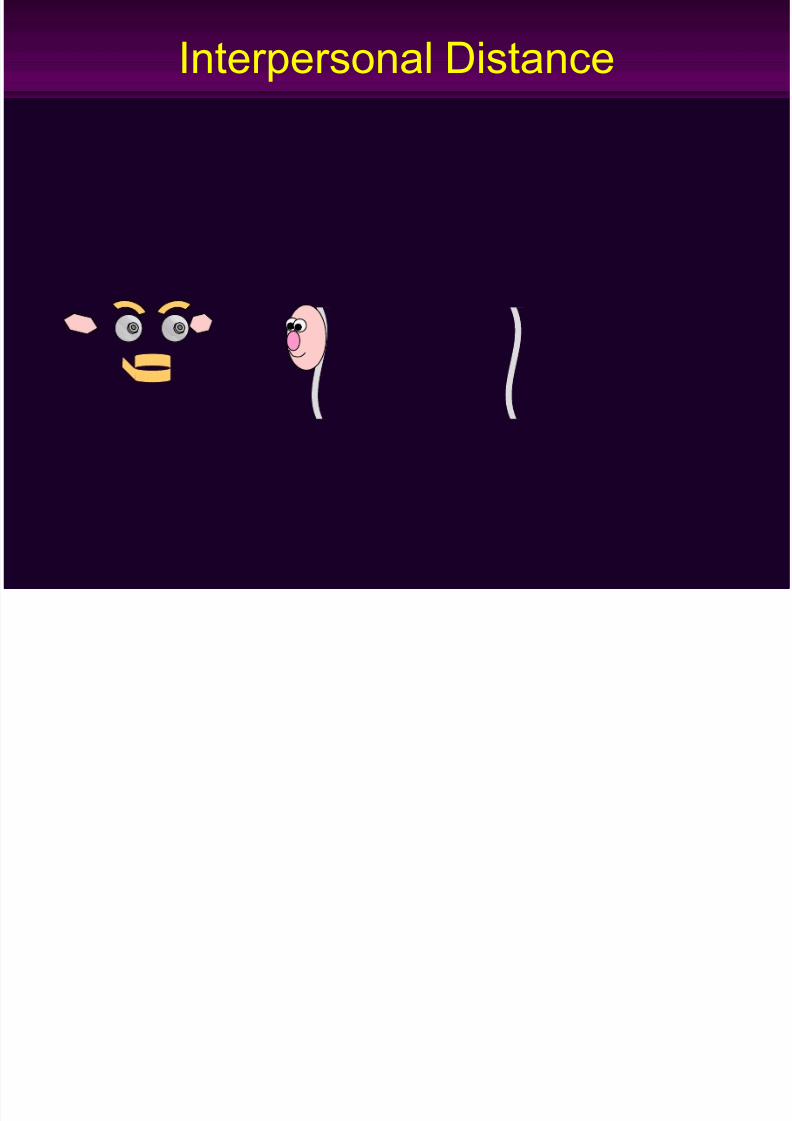
Interpersonal Distance
Comfortableinteraction distance
8/6/2019 Embodied Kismet
http://slidepdf.com/reader/full/embodied-kismet 14/37
Interpersonal Distance
8/6/2019 Embodied Kismet
http://slidepdf.com/reader/full/embodied-kismet 15/37
Interpersonal Distance

8/6/2019 Embodied Kismet
http://slidepdf.com/reader/full/embodied-kismet 16/37
Interpersonal Distance
8/6/2019 Embodied Kismet
http://slidepdf.com/reader/full/embodied-kismet 17/37
Interpersonal Distance
8/6/2019 Embodied Kismet
http://slidepdf.com/reader/full/embodied-kismet 18/37
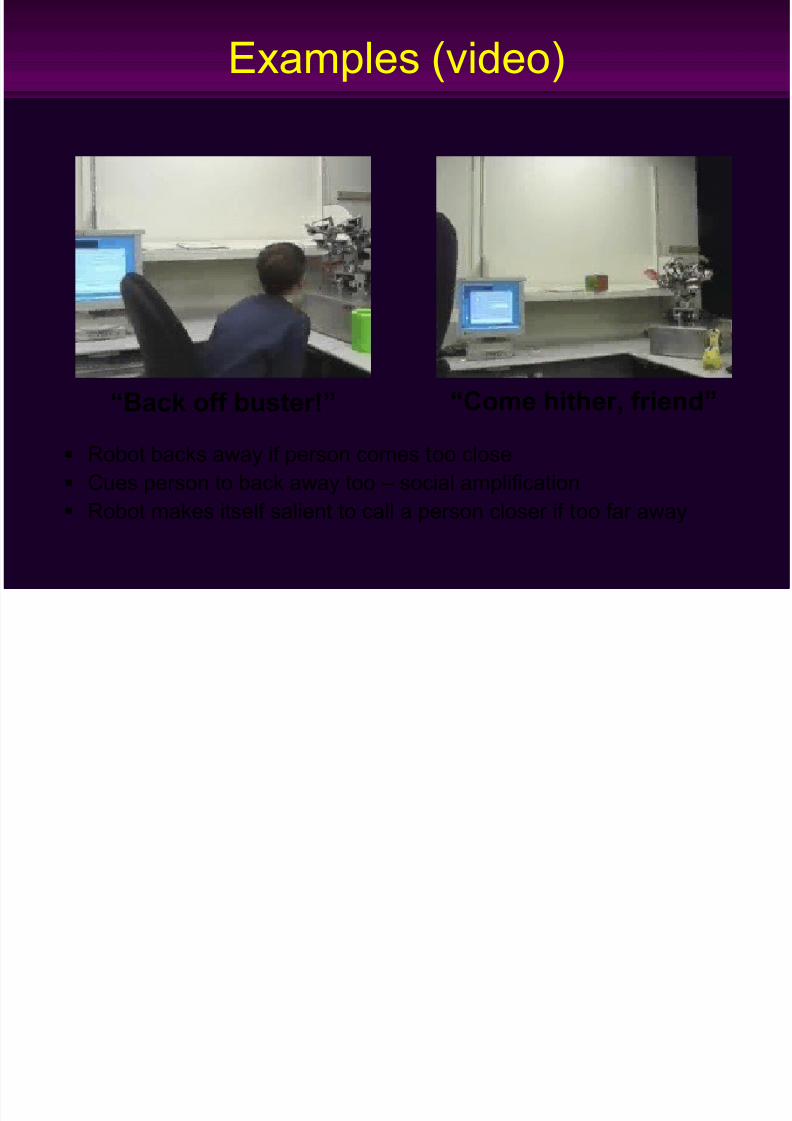
Examples (video)
Robot backs away if person comes too close
Cues person to back away too – social amplification
Robot makes itself salient to call a person closer if too far away
“Back off buster!”“Come hither, friend”

8/6/2019 Embodied Kismet
http://slidepdf.com/reader/full/embodied-kismet 19/37
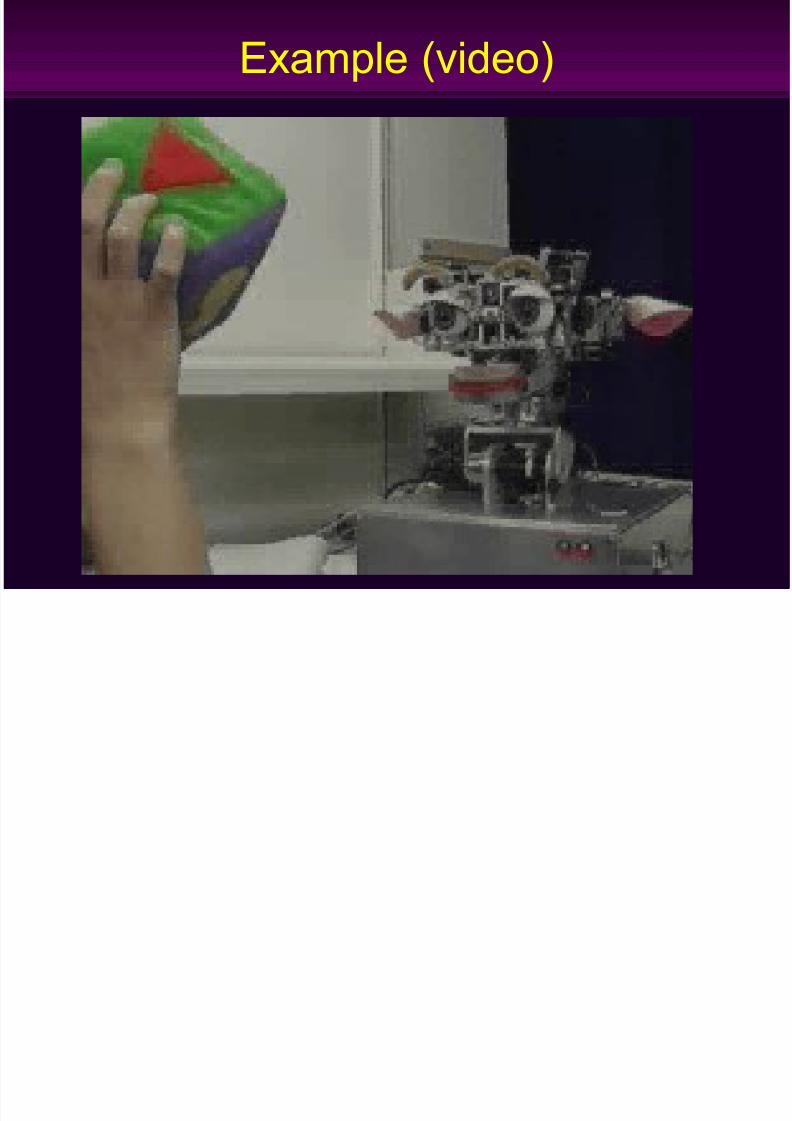
Negotiating object showing
Comfortable interaction
speed
Too fast –
irritation response
Too fast,
Too close –threat response
8/6/2019 Embodied Kismet
http://slidepdf.com/reader/full/embodied-kismet 20/37
Example (video)
8/6/2019 Embodied Kismet
http://slidepdf.com/reader/full/embodied-kismet 21/37
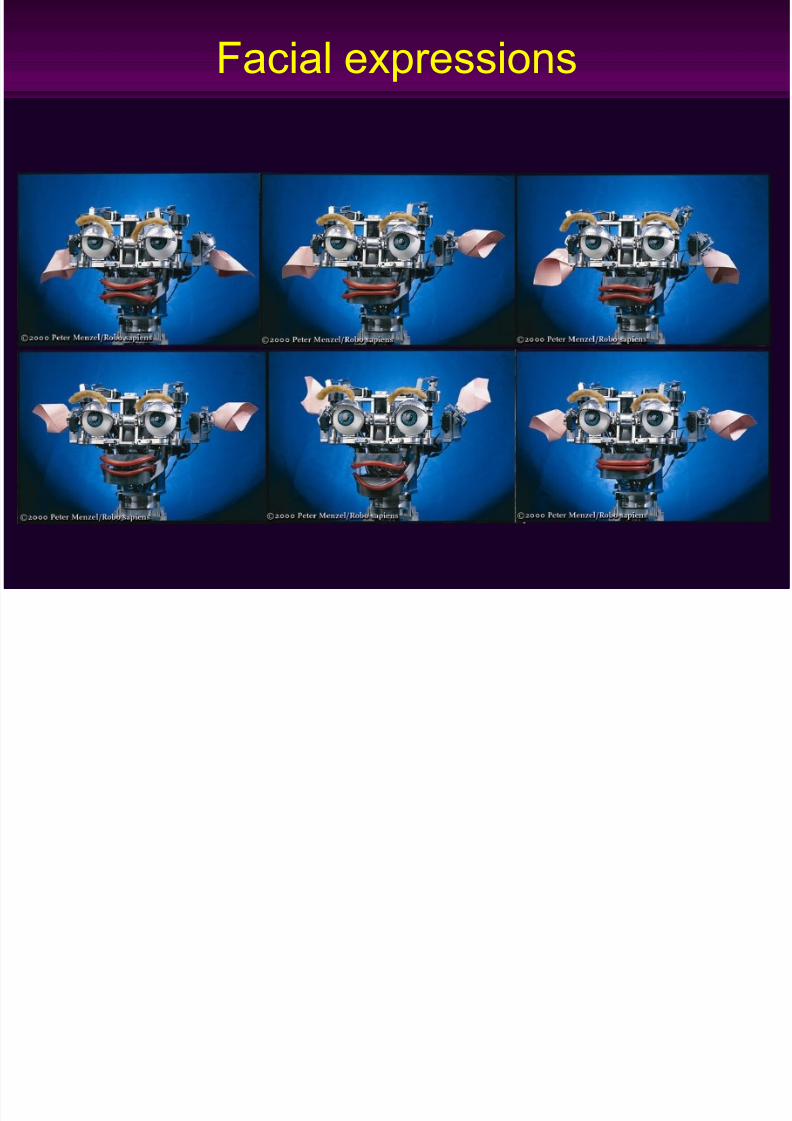
Facial expressions
8/6/2019 Embodied Kismet
http://slidepdf.com/reader/full/embodied-kismet 22/37

8/6/2019 Embodied Kismet
http://slidepdf.com/reader/full/embodied-kismet 23/37
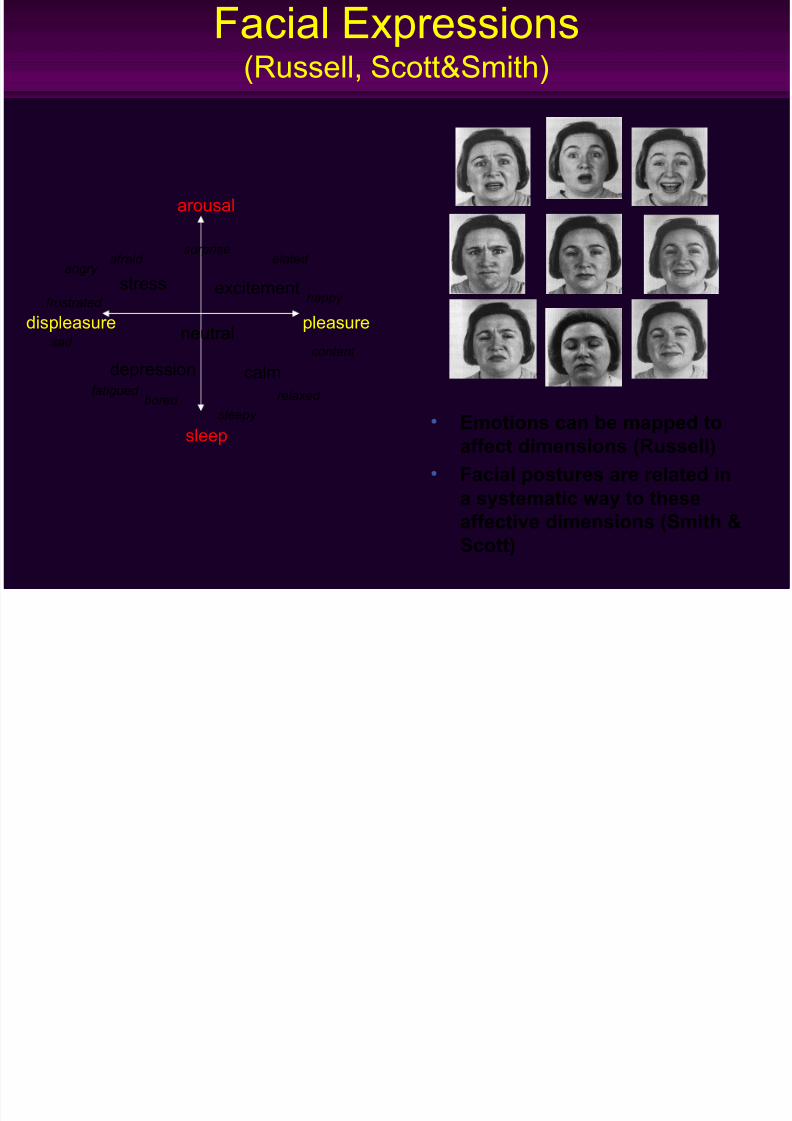
Negative
valence
Open
stance
Low
arousal
High
arousal
Positive
valence
Closedstance
tired
content
anger
fear
Generating Posture, Expressions
8/6/2019 Embodied Kismet
http://slidepdf.com/reader/full/embodied-kismet 24/37
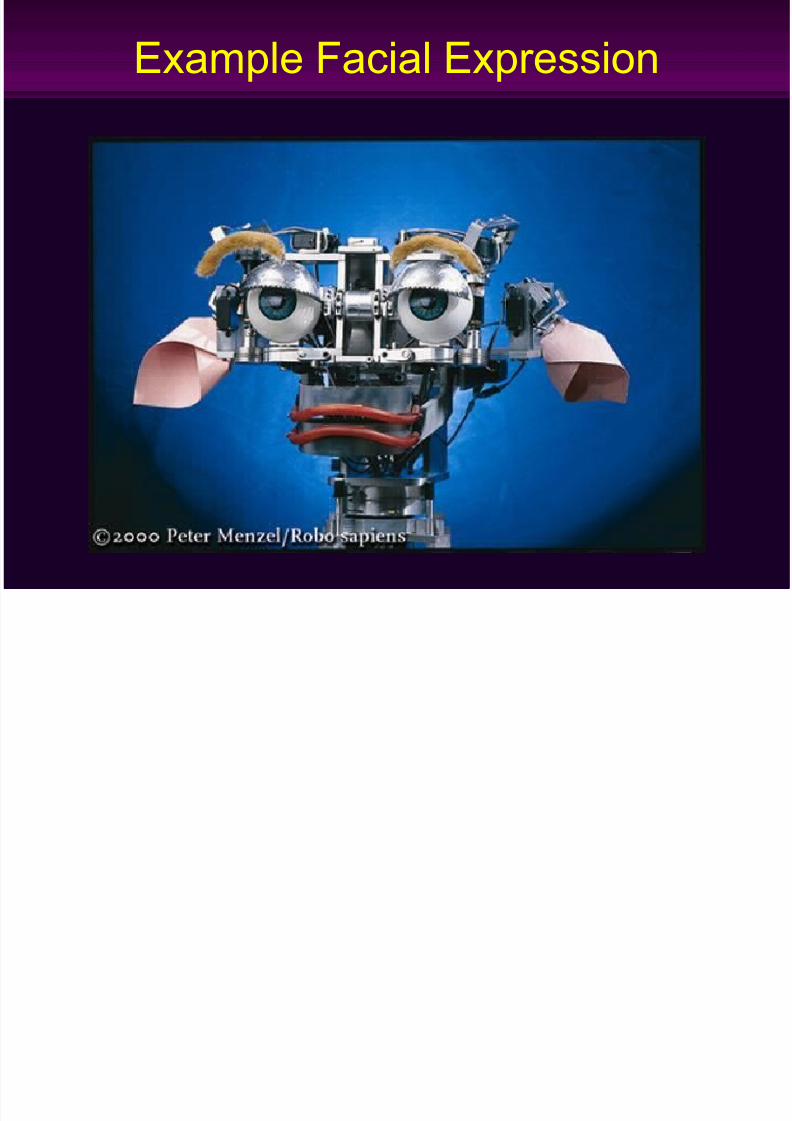
Example Facial Expression
8/6/2019 Embodied Kismet
http://slidepdf.com/reader/full/embodied-kismet 25/37
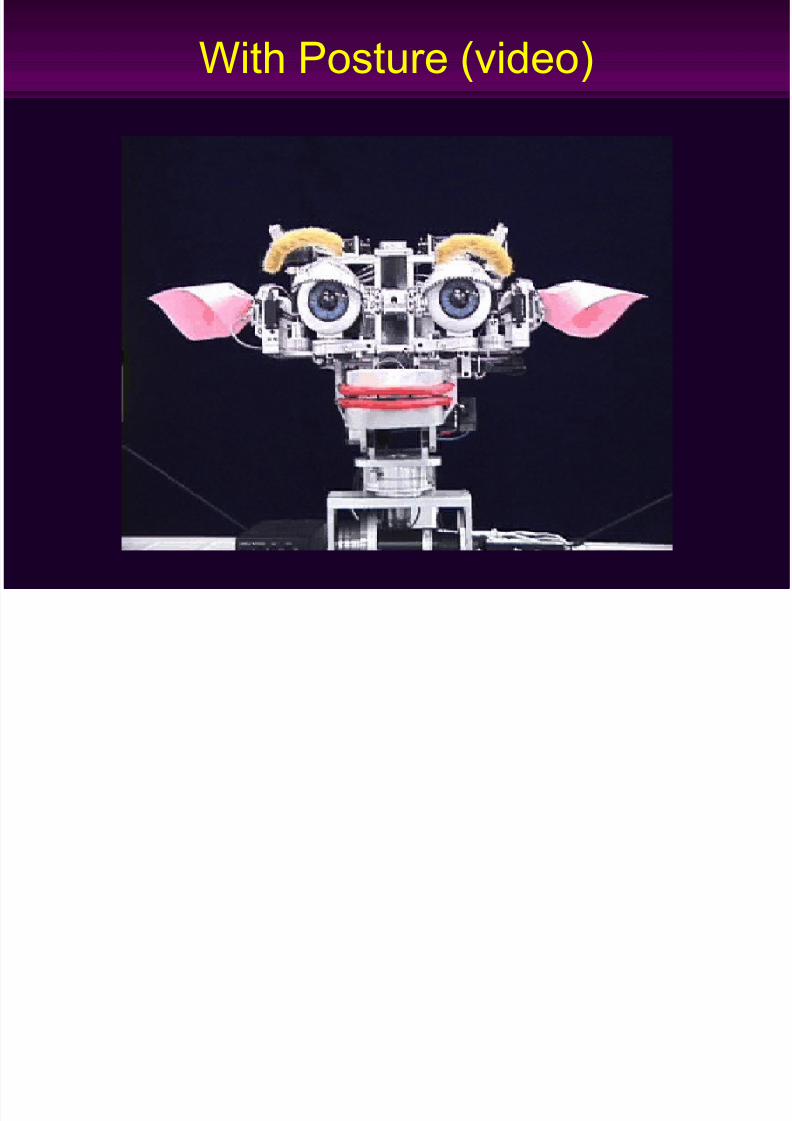
With Posture (video)
8/6/2019 Embodied Kismet
http://slidepdf.com/reader/full/embodied-kismet 26/37
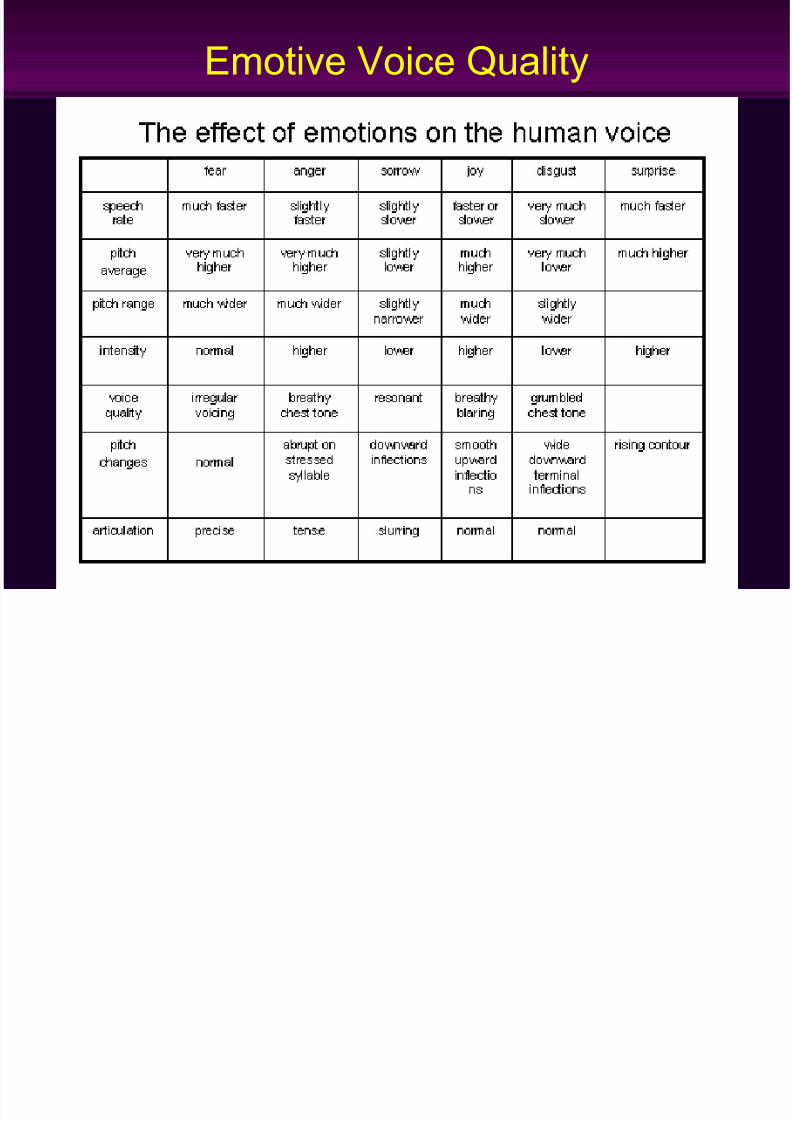
Emotive Voice Quality
8/6/2019 Embodied Kismet
http://slidepdf.com/reader/full/embodied-kismet 27/37
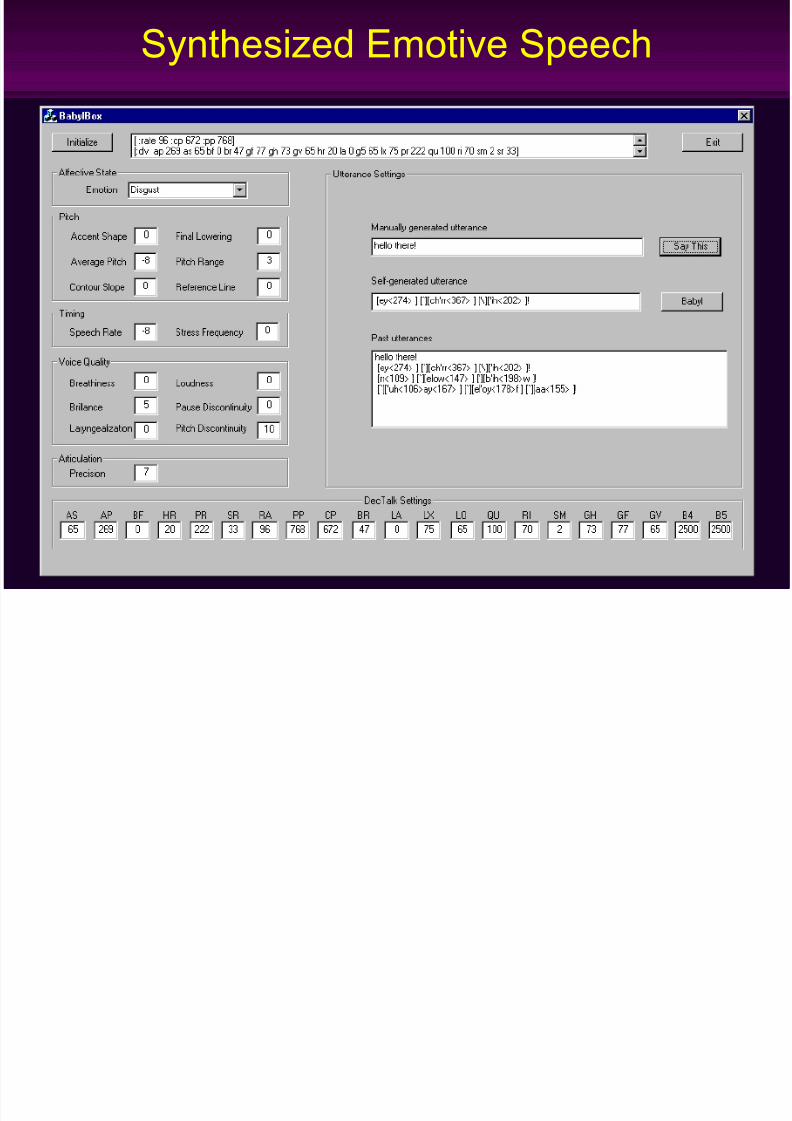
Synthesized Emotive Speech
8/6/2019 Embodied Kismet
http://slidepdf.com/reader/full/embodied-kismet 28/37
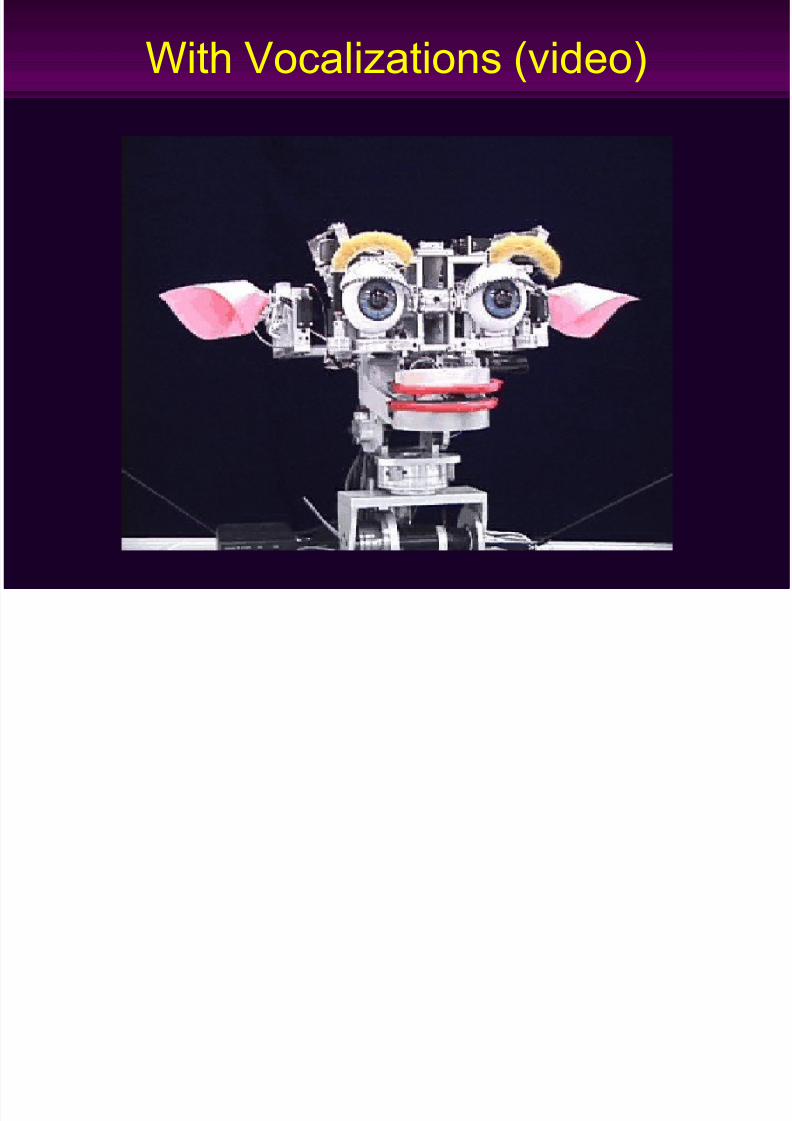
With Vocalizations (video)
8/6/2019 Embodied Kismet
http://slidepdf.com/reader/full/embodied-kismet 29/37
But…
Is there moreto life thanbeing really,
really, really,ridiculously
good-looking?
8/6/2019 Embodied Kismet
http://slidepdf.com/reader/full/embodied-kismet 30/37
Affective Intent (video)
8/6/2019 Embodied Kismet
http://slidepdf.com/reader/full/embodied-kismet 31/37
8/6/2019 Embodied Kismet
http://slidepdf.com/reader/full/embodied-kismet 32/37
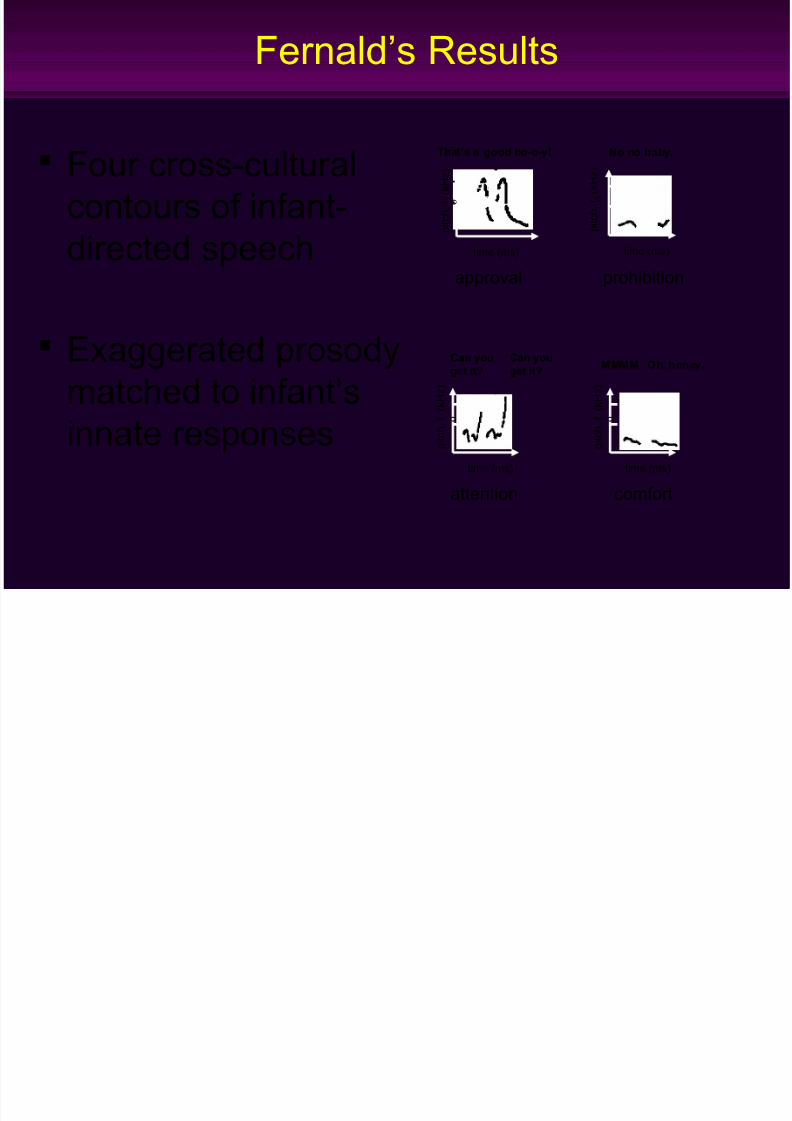
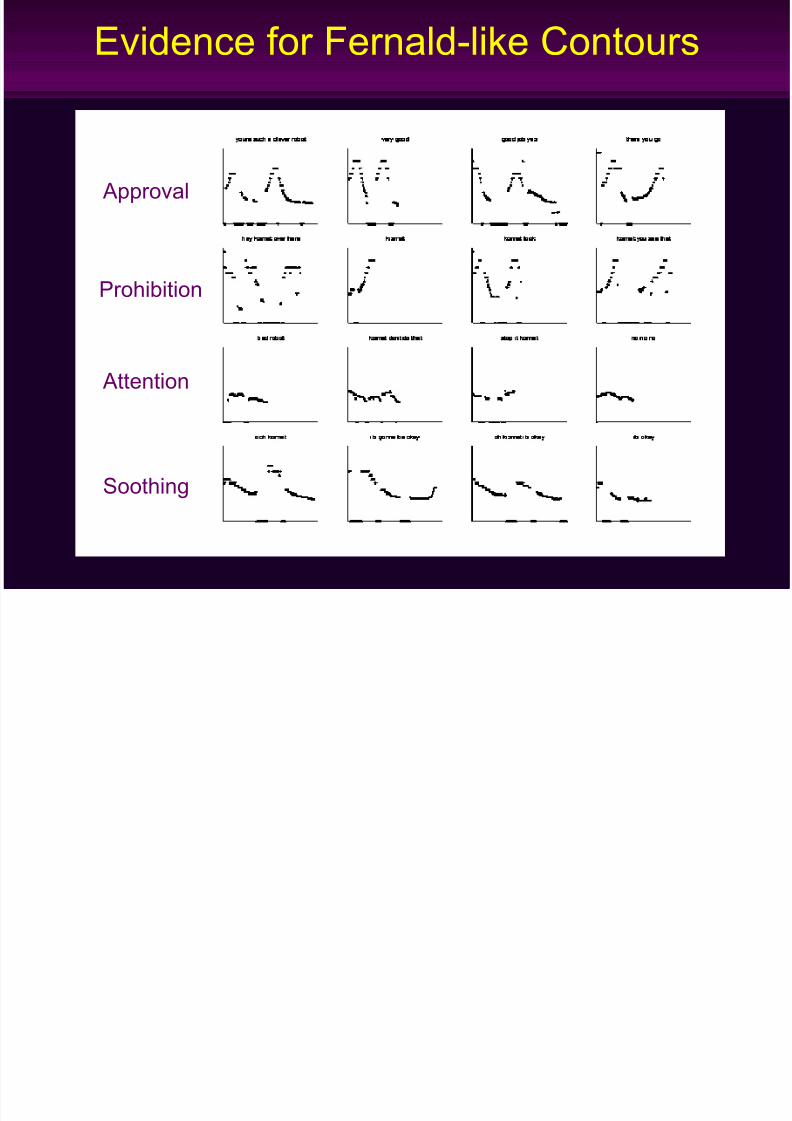
Evidence for Fernald-like Contours
Approval
Prohibition
Attention
Soothing
8/6/2019 Embodied Kismet
http://slidepdf.com/reader/full/embodied-kismet 33/37
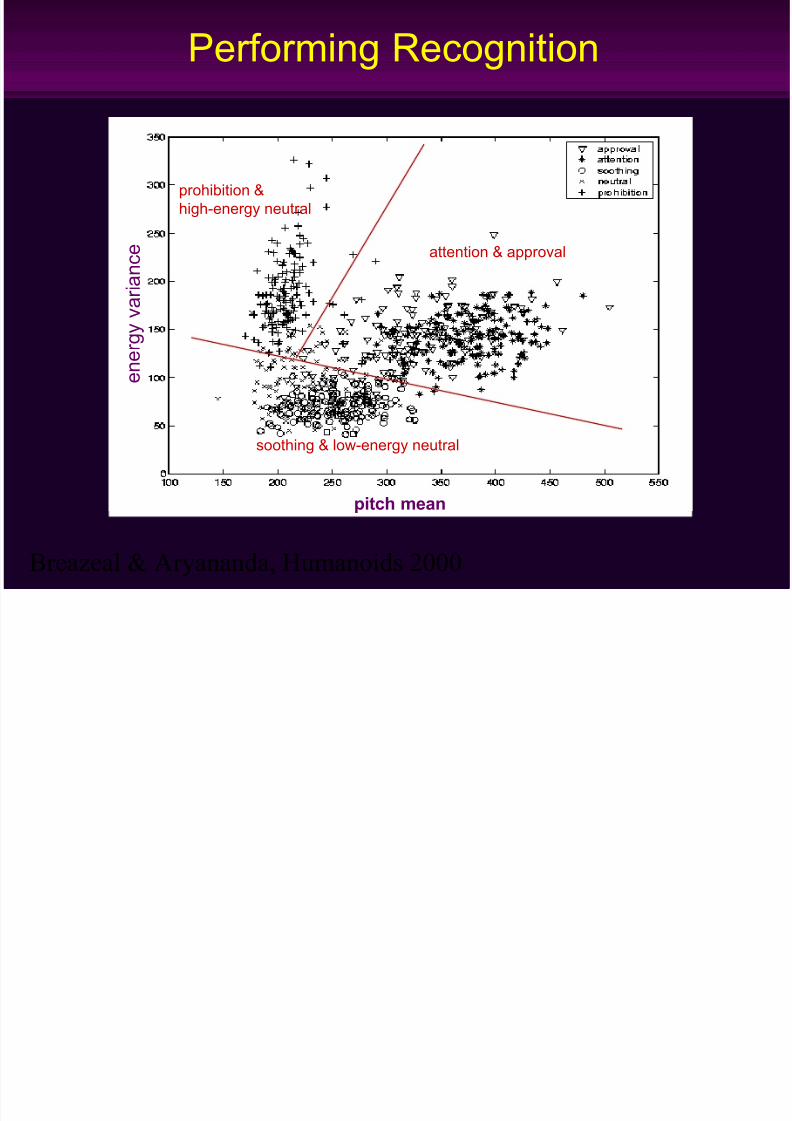
Performing Recognition
prohibition &
high-energy neutral
attention & approval
soothing & low-energy neutral
energy
varia
nce
pitch mean
Breazeal & Aryananda, Humanoids 2000

8/6/2019 Embodied Kismet
http://slidepdf.com/reader/full/embodied-kismet 34/37
Examples (video)
8/6/2019 Embodied Kismet
http://slidepdf.com/reader/full/embodied-kismet 35/37
Turn-Taking
Cornerstone of human-style communication, learning,
and instruction
Four phases of turn cycle
– relinquish floor
– listen to speaker
– reacquire floor
– speak
Integrates
– visual behavior & attention
– facial expression & animation
– body posture
– vocalization & lip synchronization
8/6/2019 Embodied Kismet
http://slidepdf.com/reader/full/embodied-kismet 36/37
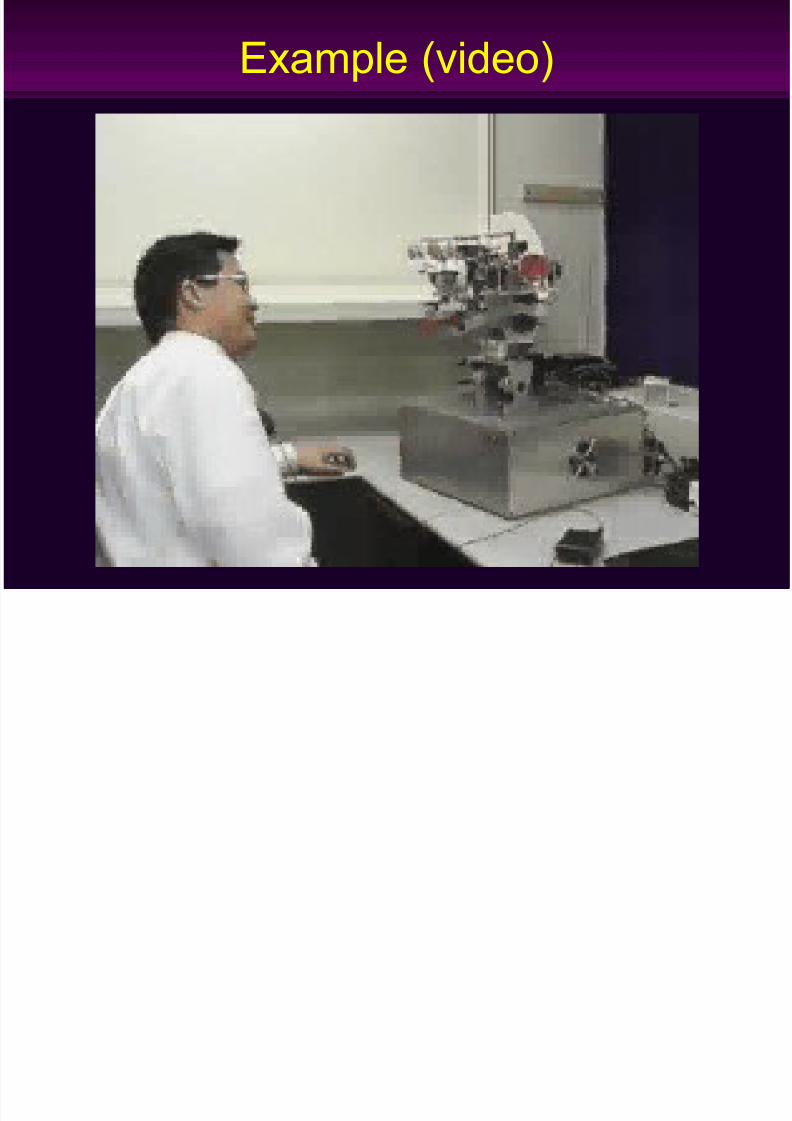
Example (video)
8/6/2019 Embodied Kismet
http://slidepdf.com/reader/full/embodied-kismet 37/37
Conclusions
Robots can partake in “infant-caregiver”
interactions
These interactions are rich with scaffolding acts
Prerequisite for socially situated learning
Kismet’s really, really, ridiculously detailed web-pages:
htt // i it d / j t /ki t/