Embedded System and Real-time Lecture 2
30
Tishk International University Engineering Faculty Mechatronics Engineering Department Lecture 2: 18/10/2020 Embedded System and Real-time Lecture 2 Instructor: Dr. Rand Basil Alhashimie
Transcript of Embedded System and Real-time Lecture 2

Tishk International UniversityEngineering FacultyMechatronics Engineering DepartmentLecture 2: 18/10/2020
Embedded System and Real-timeLecture 2
Instructor: Dr. Rand Basil Alhashimie

Outline
• Embedded System Design Model
• Types Of Embedded System
• Processors/Devices For Embedded Systems
• Introduction To PLD’s
• Classification Of PLD’s
• Programmable Logic Devices

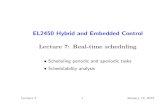
Model of Embedded System
• The simplest and most general form of
embedded system consists of a processors,
sensors, actuators and memory as shown in
following fig.
• Sensors: read the data from real-word
• Processor: processing unit (for the
processing of data)
• Actuators: perform appropriate actions on
the output data of the processor.
• Memory: for storage

Types of Embedded System
Embedded systems can be classified into different types based on performance & functional
requirements and performance of the microcontroller

Types of Embedded System1. Standard Embedded System
• Stand alone embedded systems do not require a host system like a computer, it works by itself.
• Examples for the stand alone embedded systems are mp3 players, digital cameras, microwave ovens
and temperature measurement systems
2. Real time Embedded System
• A real time embedded system is defined as, a system which gives a required o/p in a particular time.
• These types of embedded systems follow the time deadlines for completion of a task.
• Examples: Process control for power plants & chemical plants, medical systems for radiation therapy,
patient monitoring , telephone, radio, and satellite communications, computer games multimedia
systems

Types of Embedded System
3. Networked Embedded Systems
• These types of embedded systems are related to a network to access the resources.
• The connected network can be LAN, WAN or the internet. The connection can be any wired or
wireless.
• Example for the LAN networked embedded system is a home security system
4. Mobile Embedded System
• Mobile embedded systems are used in portable embedded devices like cell phones, digital
cameras

Types of Embedded System5. Small Scale Embedded System
• These types of embedded systems are designed with a single 8 or 16-bit microcontroller, that may even
be activated by a battery.
• For developing embedded software for small scale embedded systems, the main programming tools
are an editor, assembler, cross assembler and integrated development environment (IDE).
6. Medium Scale Embedded System
• These types of embedded systems design with a single 16 or 32 bit microcontroller, RISCs or DSPs.
• These types of embedded systems have both hardware and software complexities
• For developing embedded software for medium scale embedded systems, the main programming tools
are C, C++, JAVA, Visual C++, RTOS, debugger, source code engineering tool, simulator and IDE

Types of Embedded System
7. Sophisticated Embedded Systems
• These types of embedded systems have enormous hardware and software complexities, that may
need ASIPs, IPs, PLAs, scalable or configurable processors.
• They are used for cutting-edge applications that need hardware and software Co-design and
components which have to assemble in the final system

Processor List for Embedded System

PROCESSORS/DEVICES FOR EMBEDDED SYSTEMS
1. MCU:
• 4-bit MCUs: Intel 4004 (First μP) used in small applications like calculations & Toys.
• 8-bit MCUs: The most popular of this is the 8051 family.
• 16-bit MCUs: There are a few 16-bit MCUs like Intel’s 8086, 8096, 80196, some version of
PIC, etc.
• 32-bit MCUs: ARM (Advanced RISC Machine) is the most popular 32-bit MCUs use today
in image and video applications, it is used in complex applications requiring low power,
high speed, and good computing capability.

PROCESSORS/DEVICES FOR EMBEDDED SYSTEMS
2. ASIC (APPLICATION SPECIFIC INTEGRATED CIRCUIT )
• The term 'ASIC' stands for 'application-specific integrated circuit’.
• An ASIC is basically an integrated circuit designed specifically for a special
purpose or application.
• ASIC is built only for one and only one customer.
• An example of an ASIC is an IC designed for a specific line of cellular phones of a
company.

PROCESSORS/DEVICES FOR EMBEDDED SYSTEMS
3. FPGA (Field Programmable Gate Array)
A high capacity programmable logic device A field-programmable gate array (FPGA) is an integrated
circuit designed to be configured by the customer or designer after manufacturing—hence "field
programmable". FPGAs can be used to implement any logical function that an ASIC could perform.
SoC
A common array of n configuration for very-high-volume embedded systems is the system on a chip
(SoC) which contains a complete system consisting of multiple processors, multipliers, caches and
interfaces on a single chip. SoCs can be implemented as an application-specific integrated circuit
(ASIC) or using a field programmable gate array(FPGA).

PROCESSORS/DEVICES FOR EMBEDDED SYSTEMS
4. DSP PROCESSORS
• A Digital Signal Processor is a specialized microprocessor with its architecture optimized
for the operational needs of digital signal processing.
• The goal of DSPs is usually to measure, filter and/or compress continuous real-world
analog signals.
• Most general-purpose microprocessors can also execute digital signal processing
algorithms successfully, but dedicated DSPs usually have better power efficiency thus
they are more suitable in portable devices such as mobile phones because of power
consumption constraints.

Introduction to PLDs (Programmable Logic Device)
Classification of PLDs
• PLA
• PAL
• PROM
• GAL
• CPLD
• FPGA

Programmable Logic Devices (PLDs)
• PLD is a general purpose chip whose hardware can be reconfigured to meet particular
specifications.
• The first PLDs were called PAL (Programmable Array Logic) or PLA
• They used only logic gates (no flip-flops), thus allowing only the implementation of combinational
circuits(a circuit whose output is dependent only on the state of its inputs).
• To overcome this problem, registered PLDs were launched soon after, which included one flip-flop
at each output of the circuit. With them, simple sequential functions (logic circuit whose output
depends not only on the present value of its input signals but on the sequence of past inputs)
could then be implemented as well.

Programmable Logic Devices (PLDs)
• Programmable Logic Devices (PLDs) were
introduced in the mid 1970s.
• PLD is a general purpose chip whose
hardware can be reconfigured to meat
particular specifications.
• Pre-fabricated building block of many
AND/OR gates (or NOR, NAND)
• "Personalized" by making or breaking
connections among the gates

Classification of PLDs

Classification of PLDs
• In the beginning of the 1980s, additional logic circuitry was added to each PLD output. The new
output cell, called Macrocell, contained (besides the flip-flop) logic gates and multiplexers.
Moreover, the cell itself was programmable, allowing several modes of operation. Additionally, it
provided a ‘return’ (feedback) signal from the output of the circuit to the programmable array,
which gave the PLD greater flexibility. This new PLD structure was called generic PAL (GAL).
• Several GAL devices were fabricated on the same chip, using a more sophisticated routing
scheme, more advanced silicon technology, and several additional features (like JTAG support and
interface to several logic standards). This approach became known as CPLD (Complex PLD). CPLDs
are currently very popular due to their high density, high performance, and low cost (CPLDs under
a dollar can be found).

Classification of PLDs
• In the mid 1980s, FPGAs (Field Programmable Gate Arrays) were introduced.
• FPGAs differ from CPLDs in architecture, technology, built-in features, and cost. They are aimed
mainly at the implementation of large size, high-performance circuits.

1. Simple PLDsBasic Programmable Logic Operation• Depending on which of the AND/OR logic arrays is programmable, we
have three basic organizations

Programmable Logic Array (PLA)
• AND & OR Array both are
programmable in a PLA.
• PLAs come in various sizes
Typical size is 16 inputs, 32
product terms, 8 outputs.

PLA Implementation

PLA Implementation

PLA Implementation

Programmable Array Logic (PAL)
• The circuit is composed of a
programmable array of AND
gates, followed by a fixed array
of OR gates.
• Each output line permanently
connected to a specific set of
product terms

PAL Logic Implementation

PAL Logic Implementation Design Example: BCD to Gray Code Converter
Truth Table

PAL Logic Implementation Programmable PAL:

COMPARING PALS AND PLAS
• PALs have the same limitations as PLAs (small number of allowed AND terms).
• PALs have a fixed OR plane
• less flexibility than PLAs.
• PALs are simpler to manufacture, cheaper, and faster (better performance).
• PALs also often have extra circuitry connected to the output of each OR gate.
• The OR gate plus this circuitry is called a macrocell

Next Lecture
• PROGRAMMABLE ROM( PROM)
• PROM LOGIC IMPLEMENTATION
• Programmable Logic Devices