Electricity generating dance floor
21
ELECTRICITY GENERATING DANCE FLOOR BY USING RACK & PINION MECHANISM PRESENTED BY- Sunny snehi ELECTRICITY GENERATING DANCE FLOOR BY USING RACK & PINION MECHANISM
-
Upload
shivam-snehi -
Category
Engineering
-
view
606 -
download
2
Transcript of Electricity generating dance floor

ELECTRICITY GENERATING DANCE FLOOR
BY USING RACK & PINION MECHANISM
PRESENTED BY-
Sunny snehi
ELECTRICITY GENERATING DANCE FLOOR
BY USING RACK & PINION MECHANISM

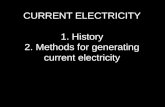
• Generating Dance Floor converts the movement of the dancing crowd into electricity and uses this power to change the appearance of the floor’s surface. The dance floor can also give feedback to other systems that use electricity, such as the sound system, motivating the DJ to outperform his/herself by responding to the energy generated by the crowd.
INTRODUCTION

The floor can have different platforms, providing unique visual experiences on every energy level, from loading and average, to the maximum level of the evening, ultimate high! All visuals are a continuous real-time interaction between the clubbers on the floor made visible, allowing every individual’s actions to contribute to the collective experience.
.

• Making the clubbers and DJ aware of their own energy, their interaction and their impact on the ‘environment’, is all part of the Sustainable Clubbing Experience.
Development and technique• The dance floor is a fusion of electronics,
embedded software and smart durable materials. This is by researching the ways to generate electricity through minimal amounts of movement. The actual technology is further processed by R&D for sustainable energy solutions.
• At present the demo version of this is to be implemented by using simple technique with pressure sensors at floor with spring arrangements.

OVERVIEW OF THE ACTUAL PROJECT
The modified way to make dance floor contains a rack and pinion assembly connected with spring mechanism to uplift the stage always. Whenever the person jumps on stage, the rack moves to downward direction. Its pinion is connected to an alternator to generate electrical energy. Stepper motors are connected to this pinion assembly to generate more power as it consist of four coils in one. One can charge the battery.
OVERVIEW OF THE ACTUAL PROJECT

Click icon to add picture

i N SIDE THE MODEL OF EGDF

REQUIREMENT OF PROJECT
• FRAME - (47*37*18) Cm (18*15*7)• RACK & PINION• STEPPER MOTOR• SPRINGS• LEAD SCREW• LED & WIRE
REQUIREMENT OF PROJECT

• A rack and pinion is a pair of gears which convert rotational motion into linear motion. The circular pinion engages teeth on a flat bar - the rack. Rotational motion applied to the pinion will cause the rack to move to the side, up to the limit of its travel. For example, in a rack railway, the rotation of a pinion mounted on a locomotive or a railcar engages a rack between the rails and pulls a train along a steep slope.
RACK & PINION

• The rack and pinion arrangement is commonly found in the steering mechanism of cars or other wheeled, steered vehicles. This arrangement provides a lesser mechanical advantage than other mechanisms such as recirculating ball, but much less backlash and greater feedback, or steering "feel". The use of a variable rack was invented by Arthur E Bishop,[1] so as to improve vehicle response and steering "feel" on-centre, and that has been fitted to many new vehicles, after he created a hot forging process to manufacture the racks, thus eliminating any subsequent need to machine the form of the gear teeth.
RACK & PINION

RACK & PINION

MESH
MESH GEOMETRY

• A stepper motor, also called stepping motor, pulse motor or digital motor, is an electromechanical device which rotates a discrete step angle when energized electrically. Stepper motors are synchronous motors in which rotor’s positions depend directly on driving signal. Rotary moment is defined by magnetic energy and is proportional to the tooth number of the rotor.
STEPPER MOTOR

Stepper motor
• The main difference between the stepping motor and a general motor is that the stepping motor only powered by a fixed driving voltage does not rotate.


Types
• There are three basic stepper motor types. They are :
• Variable-reluctance• Permanent-magnet• Hybrid

Springs
• Four springs attached to a wall and a mass. In a situation like this, the two springs can be replaced by one with a spring constant of
keq=k1+k2+k3+k4
• F = - Kx• Where• x is the displacement vector - the distance and
direction in which the spring is deformed

Springs
• F is the resulting force vector - the magnitude and direction of the restoring force the spring exerts
• • k is the spring constant or force
constant of the spring


• In the future, the technology could be used for surfaces where there is a high volume of foot traffic, such as shopping centers, train stations or airports. Beginning next year the "sustainable floor" will be on sale -- for about 4,000 dollars per square meter.
SCOPE