Electrical Simulation Lab Manuval
40
SIMULATION OF TRANSIENT RESPONSE OF RLC CIRCUIT 1. RESPONSE OF PULSE INPUT 2. RESPONSE OF STEP INPUT 3. RESPONSE OF SINUSOIDAL INPUT
-
Upload
saikiranra -
Category
Documents
-
view
58 -
download
4
description
simulation lab manuval
Transcript of Electrical Simulation Lab Manuval

SIMULATION OF TRANSIENT RESPONSE OF
RLC CIRCUIT
1. RESPONSE OF PULSE INPUT
2. RESPONSE OF STEP INPUT
3. RESPONSE OF SINUSOIDAL INPUT
AIM:
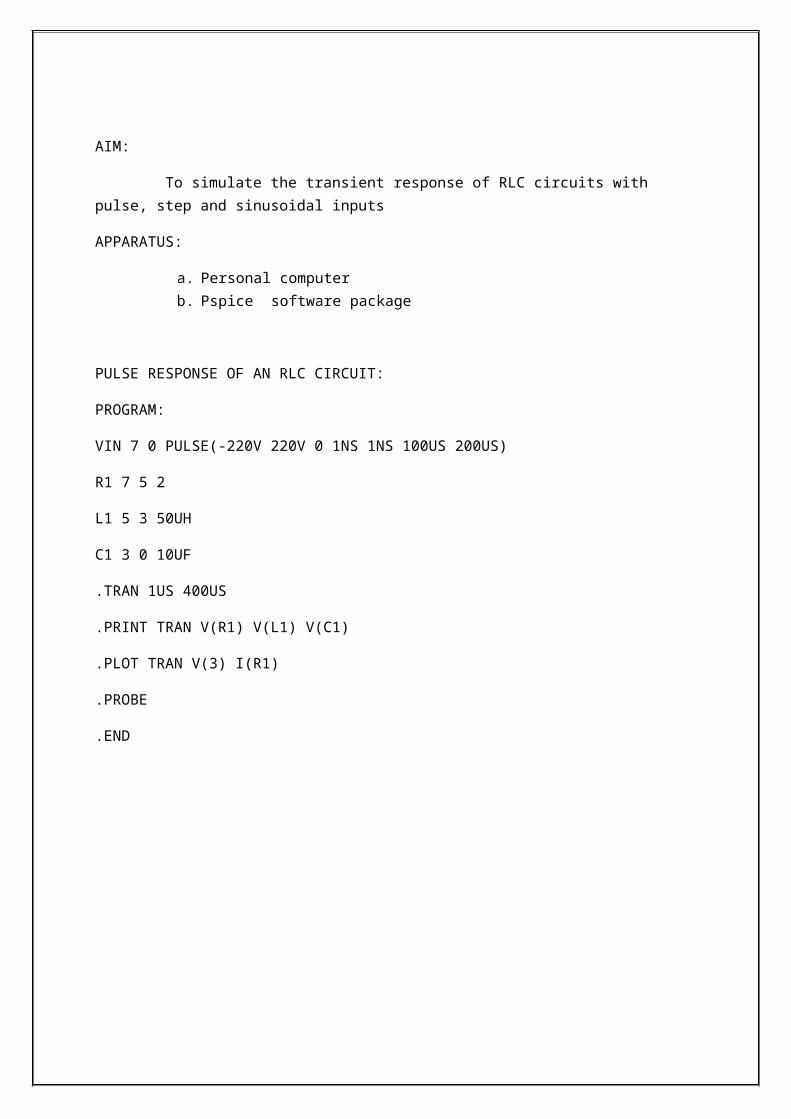
To simulate the transient response of RLC circuits with pulse, step and sinusoidal inputs
APPARATUS:
a. Personal computerb. Pspice software package
PULSE RESPONSE OF AN RLC CIRCUIT:
PROGRAM:
VIN 7 0 PULSE(-220V 220V 0 1NS 1NS 100US 200US)
R1 7 5 2
L1 5 3 50UH
C1 3 0 10UF
.TRAN 1US 400US
.PRINT TRAN V(R1) V(L1) V(C1)
.PLOT TRAN V(3) I(R1)
.PROBE
.END
SINUSOIDAL RESPONSE OF AN RLC CIRCUIT:
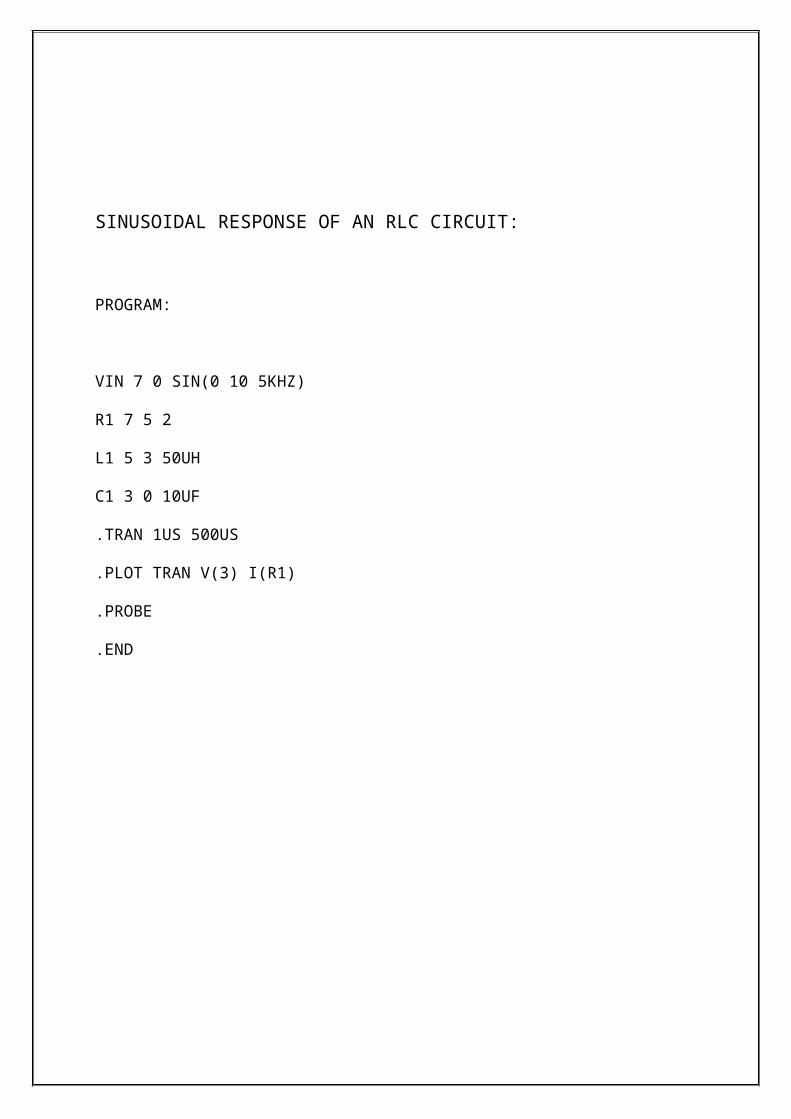
PROGRAM:
VIN 7 0 SIN(0 10 5KHZ)
R1 7 5 2
L1 5 3 50UH
C1 3 0 10UF
.TRAN 1US 500US
.PLOT TRAN V(3) I(R1)
.PROBE
.END
STEP RESPONSE OF AN RLC CIRCUIT:
PROGRAM:
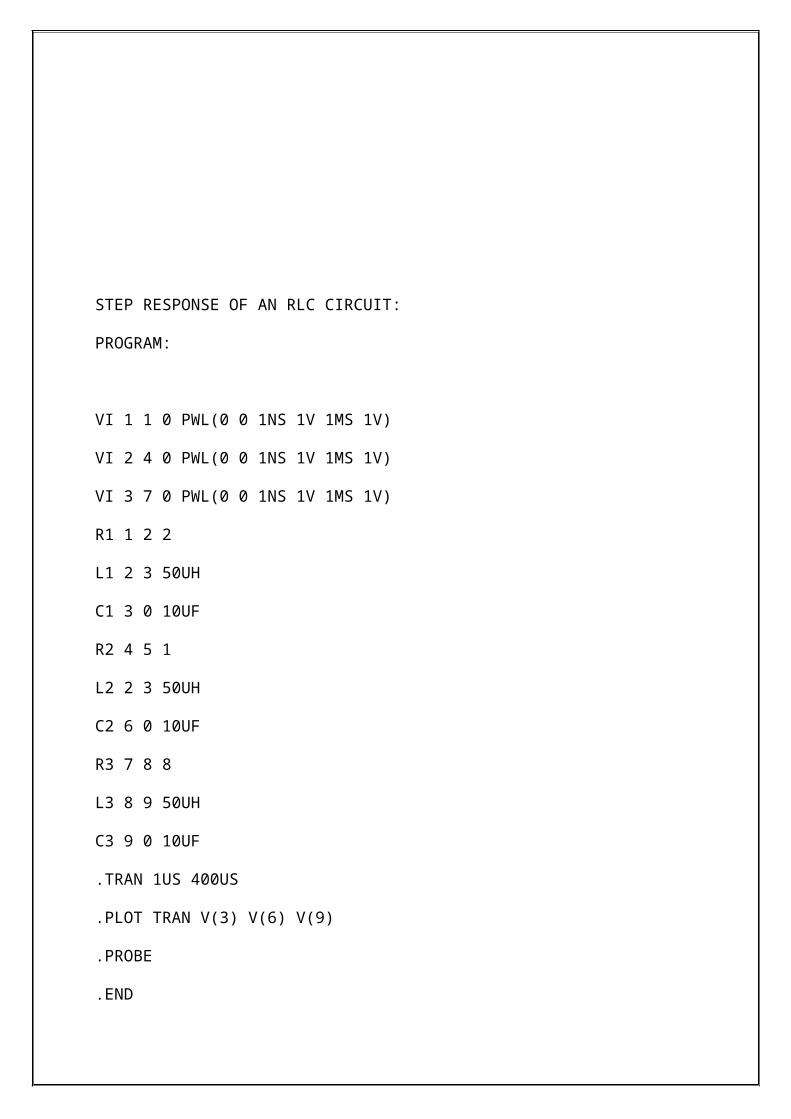
VI 1 1 0 PWL(0 0 1NS 1V 1MS 1V)
VI 2 4 0 PWL(0 0 1NS 1V 1MS 1V)
VI 3 7 0 PWL(0 0 1NS 1V 1MS 1V)
R1 1 2 2
L1 2 3 50UH
C1 3 0 10UF
R2 4 5 1
L2 2 3 50UH
C2 6 0 10UF
R3 7 8 8
L3 8 9 50UH
C3 9 0 10UF
.TRAN 1US 400US
.PLOT TRAN V(3) V(6) V(9)
.PROBE
.END
ANALYSIS OF THREE PHASE CIRCUITS REPRASENTING THE GENRATION, TRANSMISSION AND LOAD.
PLOT THREE PHASE CURRENTS USING PSPICE
AIM:
To plot the phase currents and neutral currents using pspice for the 3-Ф circuits representing the generation, transmission line and load
APPARATUS:
a. Personal computerb. Pspice software package
PROGRAM:
Van 1 0 AC 120V 0 SIN(0 169.7V 60HZ)
Vbn 2 0 AC 120V 120 SIN(0 169.7V 60HZ 0 0 120DEG)
Vcn 3 0 AC 120V 240 SIN(0 169.7V 60HZ 0 0 240DEG)
RA 1 4 0.5
RB 2 5 0.5
RC 3 6 0.5
RX 4 7 1
RY 5 8 1
RZ 6 9 1
R1 7 10 5
R2 8 11 10
R3 9 12 10
C1 10 12 150UF
L2 11 12 120MH
VX 12 0 DC 0V
.TRAN 5US 50MS
.AC LIN 1 60HZ 120HZ
.PRINT AC IM(RA) IP(RA) VM(7,12) VP(7,12)
.PRINT AC IM(RB) IP(RB) VM(8,12) VP(8,12)
.PRINT AC IM(RC) IP(RC) VM(9,12) VP(9,12)
.PRINT AC IM(VX) IP(VX)
.PROBE
.END
SINGLE PHASE FULL CONVERTER
AND
SINGLE PHASE AC VOLTAGE CONTROLLER
AIM:
To simulate the single phase full converter using RL&E loads and single phase ac voltage controller using RL&E loads
APPARATUS:
a. PERSONAL COMPUTERb. PSPICE SOFTWARE PACKAGE
SINGLE PHASE FULL BRIDGE CONVERTER
PROGRAM:
VS 10 0 SIN(0V 169.7V 60HZ)
VS1 6 2 PULSE(0V 10V 2777.8US 1NS 1NS 100US 16666.7US)
VS2 7 0 PULSE(0V 10V 2777.8US 1NS 1NS 100US 16666.7US)
VS3 8 2 PULSE(0V 10V 2777.8US 1NS 1NS 100US 16666.7US)
VS4 9 1 PULSE(0V 10V 2777.8US 1NS 1NS 100US 16666.7US)
R 2 4 10
L 4 5 20MH
C 2 11 793UF
RX 11 3 0.1
VX 5 3 DC 10V
VY 10 1 DC 0V
XT1 1 6 2 SCR
XT3 0 8 2 SCR
XT2 3 7 0 SCR
XT4 3 9 1 SCR
.SUBCKT SCR 1 3 2
S1 1 5 6 2 SMOD
RG 3 4 50
VX 4 2 DC 0V
VY 5 7 DC 0V
DT 7 2 DMOD
RT 6 2 1
CT 6 2 10UF
F1 2 6 POLY(2) VX VY 0 50 11
.MODEL SMOD VSWITCH(RON=0.0125 ROFF=10E+5 VON=0.5V VOFF=0V)
.MODEL DMOD D(IS=2.2E-15 BV=1800V TT=0)
.END SCR
.TRAN 10US 35MS 16.67MS
.PROBE
.OPTIONS ABSTOL=1.00U RELTOL=1.0M VNTOL=0.1 ITL5=10000
.FOUR 120HZ I(VX) V(2,3)
.END
SINGLE PHASE AC VOLTAGE CONTROLLER
PROGRAM:
VS 1 0 SIN(0 169.7V 60HZ)
VS1 2 4 PULSE(0V 10V 2777.8US 1NS 1NS 100US 16666.7US)
VS2 3 1 PULSE(0V 10V 2777.8US 1NS 1NS 100US 16666.7US)
R 4 5 2.5
L 5 6 6.5MH
VX 6 0 DC 0V
CS 7 7 0.1UF
RS 7 4 750
XT1 1 2 4 SCR
XT2 4 3 1 SCR
.SUBCKT SCR 1 3 2
S1 1 5 6 2 SMOD
RG 3 4 50
VX 4 2 DC 0V
VY 5 2 DC 0V
RT 2 6 1
CT 6 2 10UF
F1 2 6 POLY(2) VX VY 0 50 11
.MODEL SMODE VSWITCH(RON=0.01 ROFF=10E+5 VON=0.1V VOFF=0V)
.END SCR
.TRAN 10US 33.33MS
.PROBE
.OPTIONS ABSTOL=1.00N RELTOL=1.0M VNTOL=1.0M ITLS=10000
.FOUR 60HZ V(4) I(VX)
.END

TRANSIENT RESPONSE OF AN INTEGRATOR WITH
A LINEAR AC OP-AMP MODEL
TRANSIENT RESPONSE OF AN DIFFERENTIATOR WITH
A LINEAR AC OP-AMP MODEL
AIM:
TO SIMULATE TRANSIENT RESPONSE OF AN INTEGRATOR, DIFFERRNTIA-TOR WITH A LINEAR AC OP-AMP MODEL
APPARATUS:
a. PERSONAL COMPUTERb. PSPICE SOFTWARE PACKAGE
TRANSIENT RESPONSE OF A LINEAR AC OP-AMP WITH INTEGRATOR
PROGRAM:
VIN 1 0 PWL(0 01NS -1V 1MS -1V 1.0001MS 1V 2MS 1V 2.000MS -1V 3MS -1V 3.0001MS 1V 4MS 1V)
R1 1 2 2.5K
RF 2 4 1MEG
RX 3 0 2.5K
RL 4 0 100K
C1 2 4 0.1UF
XA1 2 3 4 0 OPAMP
.SUBCKT OPAMP 1 2 7 4
RI 1 2 2.0E6
GB 4 3 1 2 0.1M
R1 3 4 10K
C1 3 4 1.5619UF
EA 4 5 3 4 2E+5
R0 5 7 75
.ENDS
.TRAN 50US 4MS
.PLOT TRAN V(4) V(1)
.PROBE
.END
TRANSIENT RESPONSE OF A LINEAR AC OP-AMP WITH
DIFFERENTIATOR
PROGRAM:
VIN 1 0 PWL(0 0 1MS 1 2MS 0 3MS 1 4MS 0)
R1 1 2 100
RF 3 4 10K
RX 5 0 10K
RL 4 0 100K
C1 2 3 0.4UF
XA1 3 5 4 0 OPAMP
.SUBCKT OPAMP 1 2 74
RI 1 2 2.0E6
GB 4 3 1 2 0.1M
R1 3 4 10K
C1 3 4 1.5619UF
EA 4 5 3 4 2E+5
RO 5 7 75
.ENDS OPAMP
.TRAN 10US 4MS
.PLOT TRAN V(4) V(1)
.PROBE
.END
TRANSFER FUNCTION ANALYSIS OF A BJT AMPLIFIER
AIM:
THE TRANSFER FUNCTION ANALYSIS OF A BJT AMPLIFIER
APPARATUS:
a. PERSONAL COMPUTERb. P-SPICE SOFTWARE
PROGRAM:
VIN 1 0 DC 1V
R1 1 2 1K
R2 2 0 20K
RP 2 6 1.5K
RE 3 0 250
F1 4 3 VX 40
RO 4 3 100K
RC 4 5 2K
VX 6 3 DC 0V
VY 5 0 DC 0V
.TF V(4) VIN
.END
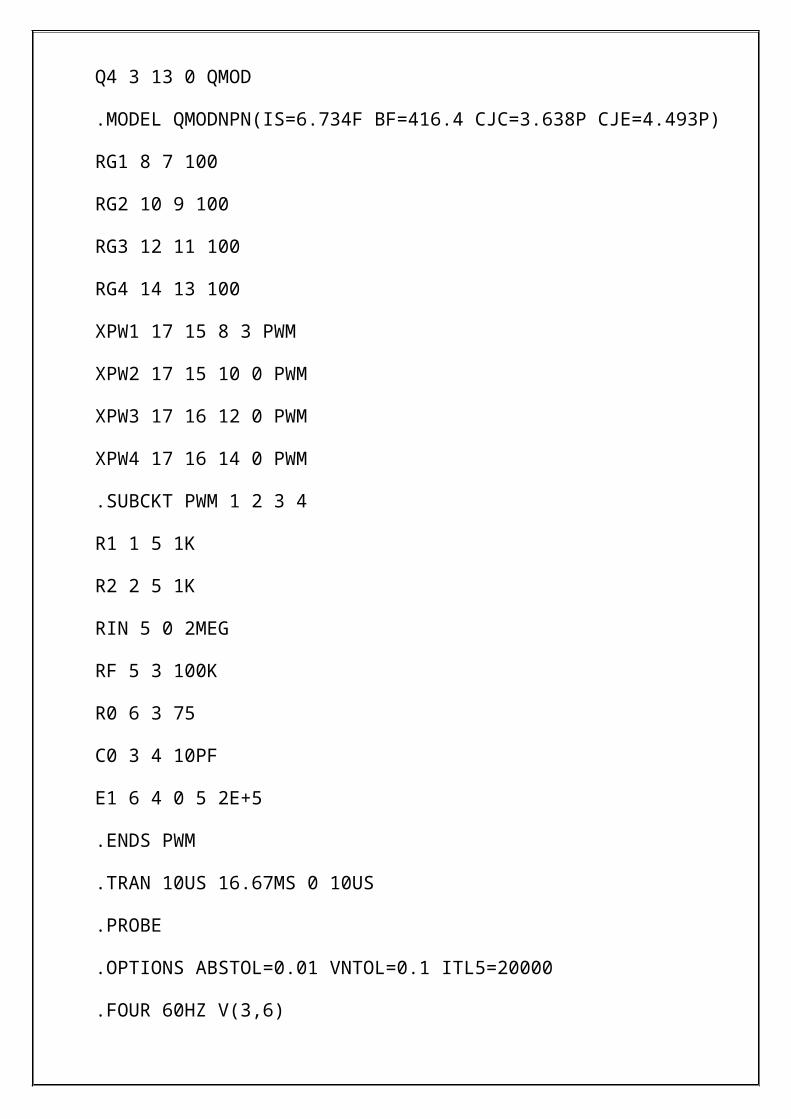
PSPICE SIMULATION OF A SINGLE PHASE INVERTER WITH A PWM CONTROLER
AIM:
THE PSPICE SIMULATION OF A SINGLE PHASE INVERTER WITH A PWM CONTROL
APPARATUS:
a. PERSONAL COMPUTERb. PSPICE SOFTWARE PACKAGE
PROGRAM:
VS 1 0 DC 10V
VR 17 0 PULSE(50V 0V 0 833.33US 833.33US 1NS 16666.67US)
RR 17 0 2MEG
VC1 15 0 PULSE(0 -30V 0 1NS 1NS 833.33US 16666.67US)
RC1 15 0 2MEG
VC3 16 0 PULSE(0 -30V 833.33US 1NS 1NS 833.33US 16666.67US)
RC3 16 0 2MEG
R 4 5 2.5
L 5 6 10MH
VX 3 4 DC 0V
VY 1 2 DC OV
D1 3 2 DMOD
D2 0 6 DMOD
D3 6 2 DMOD
D4 0 3 DMOD
.MODEL DMOD D(IS=2.2E-15 BV=1800V TT=0)
Q1 2 7 3 QMOD
Q2 6 9 0 QMOD
Q3 2 11 6 QMOD
Q4 3 13 0 QMOD
.MODEL QMODNPN(IS=6.734F BF=416.4 CJC=3.638P CJE=4.493P)
RG1 8 7 100
RG2 10 9 100
RG3 12 11 100
RG4 14 13 100
XPW1 17 15 8 3 PWM
XPW2 17 15 10 0 PWM
XPW3 17 16 12 0 PWM
XPW4 17 16 14 0 PWM
.SUBCKT PWM 1 2 3 4
R1 1 5 1K
R2 2 5 1K
RIN 5 0 2MEG
RF 5 3 100K
R0 6 3 75
C0 3 4 10PF
E1 6 4 0 5 2E+5
.ENDS PWM
.TRAN 10US 16.67MS 0 10US
.PROBE
.OPTIONS ABSTOL=0.01 VNTOL=0.1 ITL5=20000
.FOUR 60HZ V(3,6)
.END
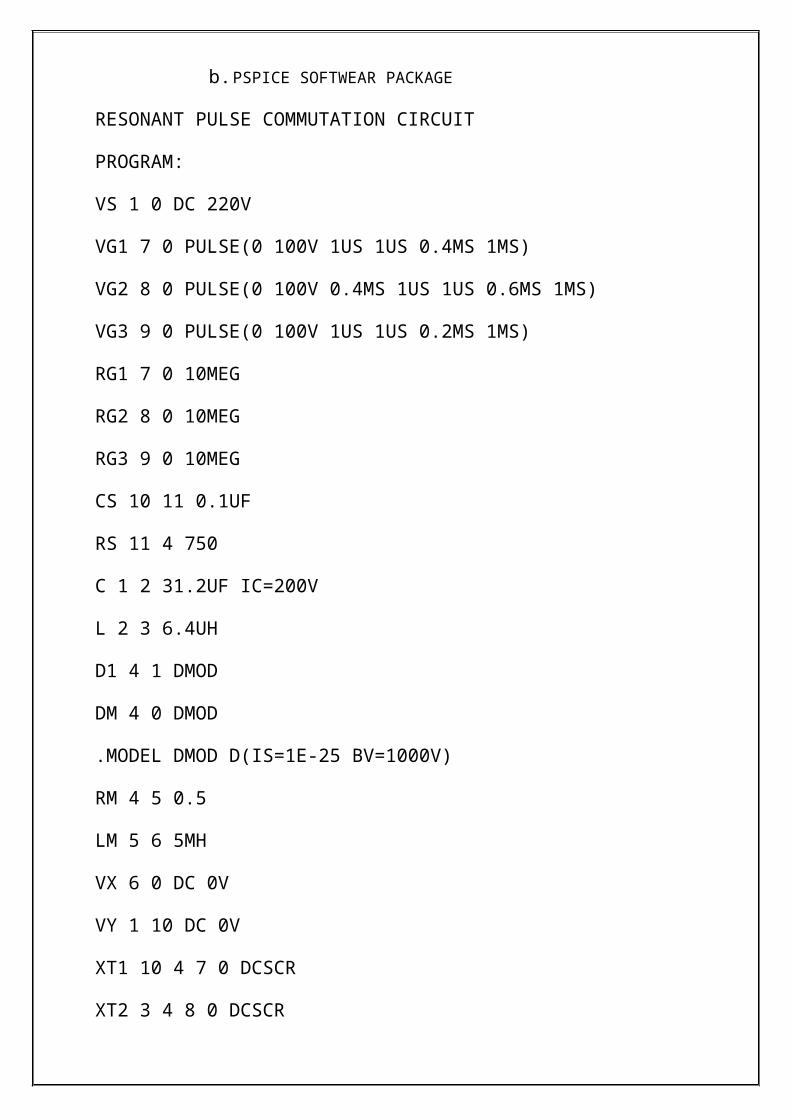
SIMULATION OF RESONANT PULSE COMMUTATION CIRCUIT AND BUCK CHOPPER
AIM:
TO OBTAIN THE SIMULATION OF RESONANT PULSE COMMUTATION CIRCUIT USING PSPICE
APPARATUS:
a. PERSONAL COMPUTER
b. PSPICE SOFTWEAR PACKAGE
RESONANT PULSE COMMUTATION CIRCUIT
PROGRAM:
VS 1 0 DC 220V
VG1 7 0 PULSE(0 100V 1US 1US 0.4MS 1MS)
VG2 8 0 PULSE(0 100V 0.4MS 1US 1US 0.6MS 1MS)
VG3 9 0 PULSE(0 100V 1US 1US 0.2MS 1MS)
RG1 7 0 10MEG
RG2 8 0 10MEG
RG3 9 0 10MEG
CS 10 11 0.1UF
RS 11 4 750
C 1 2 31.2UF IC=200V
L 2 3 6.4UH
D1 4 1 DMOD
DM 4 0 DMOD
.MODEL DMOD D(IS=1E-25 BV=1000V)
RM 4 5 0.5
LM 5 6 5MH
VX 6 0 DC 0V
VY 1 10 DC 0V
XT1 10 4 7 0 DCSCR
XT2 3 4 8 0 DCSCR
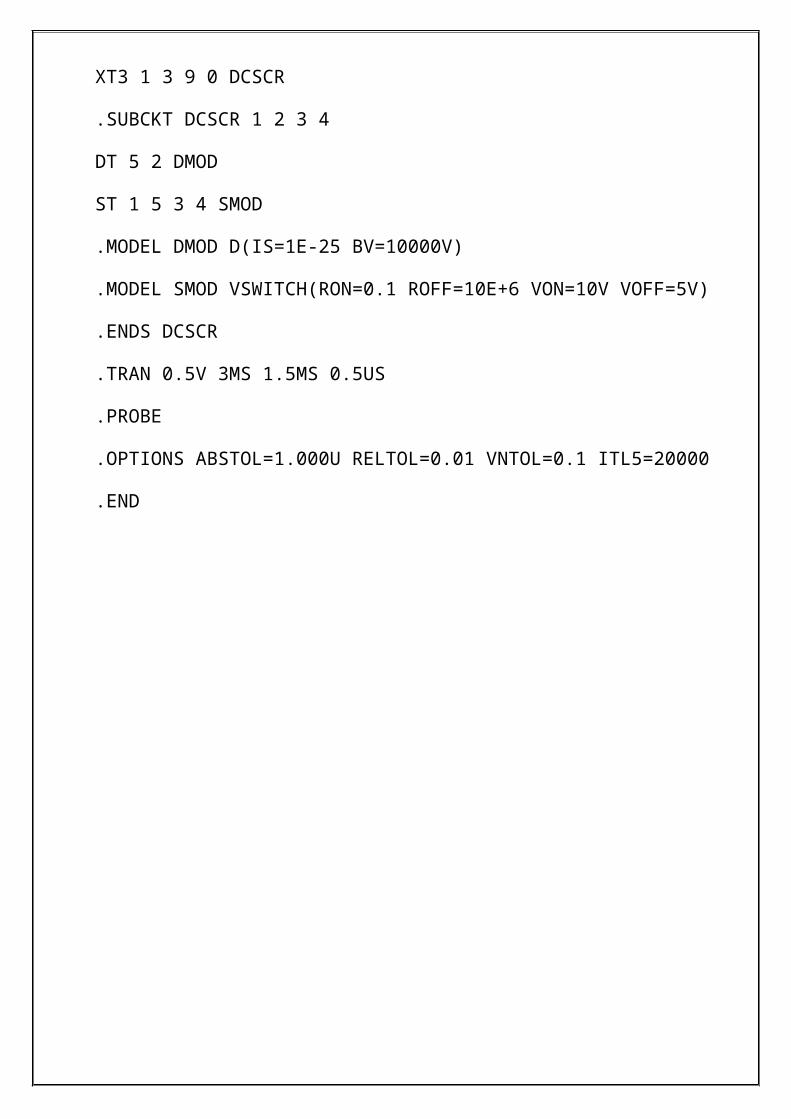
XT3 1 3 9 0 DCSCR
.SUBCKT DCSCR 1 2 3 4
DT 5 2 DMOD
ST 1 5 3 4 SMOD
.MODEL DMOD D(IS=1E-25 BV=10000V)
.MODEL SMOD VSWITCH(RON=0.1 ROFF=10E+6 VON=10V VOFF=5V)
.ENDS DCSCR
.TRAN 0.5V 3MS 1.5MS 0.5US
.PROBE
.OPTIONS ABSTOL=1.000U RELTOL=0.01 VNTOL=0.1 ITL5=20000
.END

BUCK CHOPPER
AIM:
TO OBTAIN THE SIMULATION OF BUCK CHOPPER USING PSPICE
APPARATUS:
a. PERSONAL COMPUTERb. PSPICE SOFTWARE PACKAGE
PROGRAM:
VS 1 0 DC 110V
VY 1 2 DC 0V
VG 7 3 PULSE(0 20 0 0.1NS 0.1NS 27.28US 50US)
RB 7 6 250
LE 3 4 681.83UH
CE 4 0 8.33UF IC=60V
L 4 8 40.91UH
R 8 5 3
VX 5 0 DC 0V
DM 0 3 DMOD
.MODEL DMOD D(IS=2.2E-15 BV=1800V TT=0)
Q1 2 6 3 QMOD
.MODEL QMOD NPN (IS=6.73F BF=416.4 BR=.7371 CJC=3.638P CJE=4.493P TR=239.5N TF=301.2P)
.TRAN 1US 1.6MS 1.5MS 1US UIC
.PROBE
.OPTIONS ABSTOL=1.00N RELTOL=0.01 VNTOL=0.1 ITL5=50000
.FOUR 20KHZ I(VY)
.END
PLOTTING OF BODE PLOT, ROOT LOCUS AND NYQUIST PLOT
AIM:
TO OBTAIN THE BODE PLOTS, ROOT LOCUS AND NYQUIST PLOTS FOR A GIVEN TRANSFER FUNCTION USING MATLAB
APPARATUS:
a. PERSONAL COMPUTERb. MATLAB
PROGRAM:
TO OBTAIN THE BODE PLOT FOR THE STABILITY ANALYSIS OF THE GIVEN TRANSFER FUNCTION
UP TO 3rd ORDER USING MATLAB:
Clear all
Num=[0 0 10];
Den=[1 4 8 0];
Sys=tf(num,den);
Bode(sys);
Margin(sys)
4th ORDER USING MATLAB:
Clear all
Num=[0 0 10];
Den=[1 2 4 8 0];
Sys=tf[num,den];
Bode(sys);
Margin(sys)
5th ORDER USING MATLAB:
Clear all
Num=[0 0 10];
Den=[1 2 3 4 8 0];
Sys=tf[num,den];
Bode(sys);
Margin(sys)
Program to obtain the root locus for the stability analysis of the given transfer function
Up to 3rd order using MATLAB:
Clear all
N=[0 0 10];
D=[1 4 8 0];
Sys=tf[n,d];
Rlocus(sys)
4th order using MATLAB:
Clear all
N=[0 0 10];
D=[1 2 4 8 0];
Sys=tf[n,d];
Rlocus(sys)
5th order using MATLAB:
Clear all
N=[0 0 10];
D=[1 2 3 4 8 0];
Sys=tf[n,d];
Rlocus(sys)
Program to obtain nyquist plot for the stability analysis of the given transfer function
Up to 3rd order using MATLAB:
Clear all
N=[0 0 10];
D=[1 4 8 0];
Sys=tf[n,d];
Nyquist(sys);
[re,im]=nyquist(sys)
4th order using MATLAB:
Clear all
N=[0 0 10];
D=[1 2 4 8 0];
Sys=tf[n,d];
Nyquist(sys);
[re,im]=nyquist(sys)
5th order using MATLAB:
Clear all
N=[0 0 10];
D=[1 2 3 4 8 0];
Sys=tf[n,d];
Nyquist(sys);
[re,im]=nyquist(sys)
POWER FLOW SOLUTION USING GAUSS-SIEDAL METHOD
AIM:
To develop a program for the solution of load flow using gauss-siedal method.
APPARATUS:
a. Personal computerb. MATLAB software
PROGRAM:
Clear
N=4
V=[1.04 1.04 1]
Y=[3-j*9 -2+j*6 -1+j*3 0
-2+j*6 3666-j*11 -0.666+j*2 -1+j*3
-1+j*3 -0.666+j*2 3.666-j*11 -2+j*6
0 -1+j*3 -2+j*6 3-j*9 ]
Type=ones(n,1)
Typechanged=zeros(n,1)
Qlimitmax=zeros(n,1)
Qlimitmin=zeros(n,1)
Vmagfixed(2)=1.04
Diff=10,noofilter=1
Vperv=v;
While(diff>0.00001 || nofilter==1)
Abs(v)
Abs(vprev)
%pause
Vprev=v;
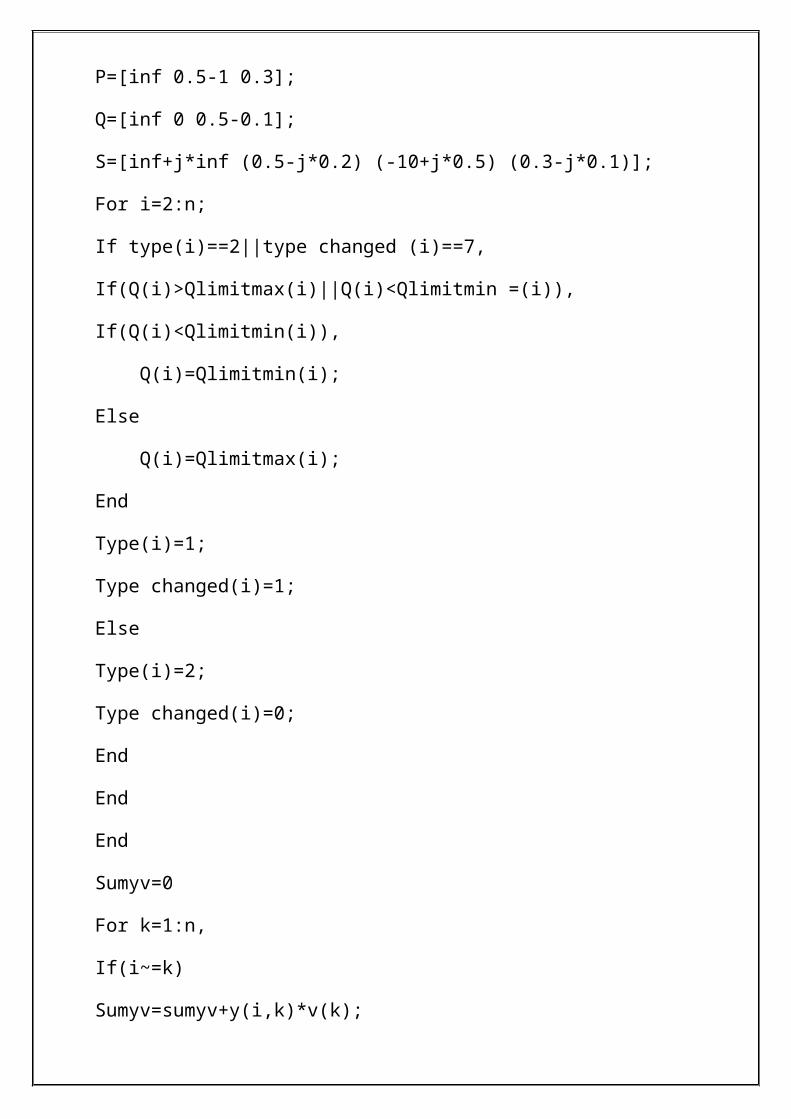
P=[inf 0.5-1 0.3];
Q=[inf 0 0.5-0.1];
S=[inf+j*inf (0.5-j*0.2) (-10+j*0.5) (0.3-j*0.1)];
For i=2:n;

If type(i)==2||type changed (i)==7,
If(Q(i)>Qlimitmax(i)||Q(i)<Qlimitmin =(i)),
If(Q(i)<Qlimitmin(i)),
Q(i)=Qlimitmin(i);
Else
Q(i)=Qlimitmax(i);
End
Type(i)=1;
Type changed(i)=1;
Else
Type(i)=2;
Type changed(i)=0;
End
End
End
Sumyv=0
For k=1:n,
If(i~=k)
Sumyv=sumyv+y(i,k)*v(k);
End
End
V(i)=(1/y(i,i)*((p(i)-j*q(i))/conj(v(i)-sumyv);
If type (i)==2 & type changed (i)~=1,
V(i)=polartorect(vmagfixed(i),angle(v(i)*180/pi);
End
Diff=max(abs(abs(v(2:n))-abs(vprev(2:n))));
Noofilter=nofilter+1;
End.
MODELLING OF TRANSFORMER
AIM:
To find the rms current and gain of frequency plot of following circuit with the transfer function by using PSPICE.
APPARATUS:
a. Personal computerb. Pspice software
PROGRAM:
VIN 1 0 AC 120V
RI 5 2 0.5
VY 1 5 DC 0V
L1 2 0 1MH
L2 0 4 0.5MH
K12 L1 L2 0.999
R2 4 6 0.5
RL 6 7 150
VX 7 0 DC 0V
.AC LIN 150HZ 1000HZ
.PRINT AC IM(VIN) IM(RL) IP(RL)
.PROBE
.END