Electric Vehicles paper
9
Electrical consumption of two-, three- and four-wheel light-duty electric vehicles in India Samveg Saxena ⇑ , Anand Gopal, Amol Phadke Environmental Energy Technologies Division, Lawrence Berkeley National Laboratory, United States highlights Model electrical consumption of 2-, 3- and 4-wheelers in India. Average city energy use is 33 Wh/km for scooters, 61 Wh/km for 3-wheelers. Average city energy use is 84 Wh/km and 123 Wh/km for low and high power 4-wheelers. The increased energy use from air conditioning is quantified. Energy use from variations in vehicle mass and motor efficiency are quantified. article info Article history: Received 9 August 2013 Received in revised form 18 October 2013 Accepted 27 October 2013 Available online 20 November 2013 Keywords: Electric vehicles Powertrain Transportation Vehicle to grid India abstract The Government of India has recently announced the National Electric Mobility Mission Plan, which sets ambitious targets for electric vehicle deployment in India. One important barrier to substantial market penetration of EVs in India is the impact that large numbers of EVs will have on an already strained elec- tricity grid. Properly predicting the impact of EVs on the Indian grid will allow better planning of new generation and distribution infrastructure as the EV mission is rolled out. Properly predicting the grid impacts from EVs requires information about the electrical energy consumption of different types of EVs in Indian driving conditions. This study uses detailed vehicle powertrain models to estimate per kilo- meter electrical consumption for electric scooters, 3-wheelers and different types of 4-wheelers in India. The powertrain modeling methodology is validated against experimental measurements of electrical consumption for a Nissan Leaf. The model is then used to predict electrical consumption for several types of vehicles in different driving conditions. The results show that in city driving conditions, the average electrical consumption is: 33 Wh/km for the scooter, 61 Wh/km for the 3-wheeler, 84 Wh/km for the low power 4-wheeler, and 123 Wh/km for the high power 4-wheeler. For highway driving conditions, the average electrical consumption is: 133 Wh/km for the low power 4-wheeler, and 165 Wh/km for the high power 4-wheeler. The impact of variations in several parameters are modeled, including the impact of different driving conditions, different levels of loading by air conditions and other ancillary components, different total vehicle masses, and different levels of motor operating efficiency. Ó 2013 Elsevier Ltd. All rights reserved. 1. Introduction India is one of the world’s most rapidly growing economies, and is the third largest vehicle market in the world. Annual demand of vehicles is rapidly growing in India, with 2020 annual projected sales of 10 million passenger vehicles, 2.7 million commercial vehi- cles, and 34 million two-wheelers. India currently imports about 85% of its oil and is projected to reach 92% by 2020, creating a signif- icant challenge for the balance of payments and the energy security of the country [1]. Based on the pressing challenges with growth in vehicle sales and energy security facing the country, the Central Government of India has released the National Electric Mobility Mission Plan (NEMMP) [1] which establishes a pathway for the widespread deployment of hybrids, plug-in hybrids, and electric vehicles in India. The NEMMP calls for the deployment of 5–7 mil- lion EVs (hybrids and full EVs) on the road by 2020, and the Govern- ment of India has committed Rs 22,500 cr (approximately $4.1 Billion USD) to this initiative. Similar goals for widespread electric vehicle adoption have been set by other governments around the world [2–4]. The rapid deployment of plug-in hybrid and fully electric vehi- cles (collectively called plug-in vehicles, PEVs, in this paper) called for in the NEMMP places significant demands on an already strained electricity grid in India [5]. However, since range anxiety is a significant consumer perception barrier to EV deployment 0306-2619/$ - see front matter Ó 2013 Elsevier Ltd. All rights reserved. http://dx.doi.org/10.1016/j.apenergy.2013.10.043 ⇑ Corresponding author. E-mail address: [email protected] (S. Saxena). Applied Energy 115 (2014) 582–590 Contents lists available at ScienceDirect Applied Energy journal homepage: www.elsevier.com/locate/apenergy
-
Upload
fawadazeemqaisrani -
Category
Documents
-
view
235 -
download
0
description
paper on electric vehicles that cannot be downloaded from elesvier impact factor journal without payment.
Transcript of Electric Vehicles paper
-
fEnvironmental Energy Technologies Division, Lawrence
h i g h l i g h t s
and 4-or scoond 123ditioninass an
tions. This study uses detailed vehicle powertrain models to estimate per kilo-
vehicles is rapidly growing in India, with 2020 annual projectedsales of 10 million passenger vehicles, 2.7 million commercial vehi-cles, and 34 million two-wheelers. India currently imports about85% of its oil and is projected to reach 92% by 2020, creating a signif-icant challenge for the balance of payments and the energy securityof the country [1]. Based on the pressing challenges with growth invehicle sales and energy security facing the country, the Central
Electric Mobilitypathwayrids, andment of 5
lion EVs (hybrids and full EVs) on the road by 2020, and the Gment of India has committed Rs 22,500 cr (approximateBillion USD) to this initiative. Similar goals for widespread electricvehicle adoption have been set by other governments around theworld [24].
The rapid deployment of plug-in hybrid and fully electric vehi-cles (collectively called plug-in vehicles, PEVs, in this paper) calledfor in the NEMMP places signicant demands on an alreadystrained electricity grid in India [5]. However, since range anxietyis a signicant consumer perception barrier to EV deployment
Corresponding author.
Applied Energy 115 (2014) 582590
Contents lists availab
lseE-mail address: [email protected] (S. Saxena).1. Introduction
India is one of the worlds most rapidly growing economies, andis the third largest vehicle market in the world. Annual demand of
Government of India has released the NationalMission Plan (NEMMP) [1] which establishes awidespread deployment of hybrids, plug-in hybvehicles in India. The NEMMP calls for the deploy0306-2619/$ - see front matter 2013 Elsevier Ltd. All rights reserved.http://dx.doi.org/10.1016/j.apenergy.2013.10.043for theelectric7 mil-overn-ly $4.1PowertrainTransportationVehicle to gridIndia
meter electrical consumption for electric scooters, 3-wheelers and different types of 4-wheelers in India.The powertrain modeling methodology is validated against experimental measurements of electrical
consumption for a Nissan Leaf. The model is then used to predict electrical consumption for several typesof vehicles in different driving conditions. The results show that in city driving conditions, the averageelectrical consumption is: 33 Wh/km for the scooter, 61 Wh/km for the 3-wheeler, 84 Wh/km for thelow power 4-wheeler, and 123 Wh/km for the high power 4-wheeler. For highway driving conditions,the average electrical consumption is: 133 Wh/km for the low power 4-wheeler, and 165 Wh/km forthe high power 4-wheeler. The impact of variations in several parameters are modeled, including theimpact of different driving conditions, different levels of loading by air conditions and other ancillarycomponents, different total vehicle masses, and different levels of motor operating efciency.
2013 Elsevier Ltd. All rights reserved.Keywords:Electric vehicles
EVs in Indian driving condiModel electrical consumption of 2-, 3- Average city energy use is 33 Wh/km f Average city energy use is 84 Wh/km a The increased energy use from air con Energy use from variations in vehicle m
a r t i c l e i n f o
Article history:Received 9 August 2013Received in revised form 18 October 2013Accepted 27 October 2013Available online 20 November 2013Berkeley National Laboratory, United States
wheelers in India.ters, 61 Wh/km for 3-wheelers.Wh/km for low and high power 4-wheelers.g is quantied.d motor efciency are quantied.
a b s t r a c t
The Government of India has recently announced the National Electric Mobility Mission Plan, which setsambitious targets for electric vehicle deployment in India. One important barrier to substantial marketpenetration of EVs in India is the impact that large numbers of EVs will have on an already strained elec-tricity grid. Properly predicting the impact of EVs on the Indian grid will allow better planning of newgeneration and distribution infrastructure as the EV mission is rolled out. Properly predicting the gridimpacts from EVs requires information about the electrical energy consumption of different types ofSamveg Saxena , Anand Gopal, Amol PhadkeElectrical consumption of two-, three- andvehicles in India
Applied
journal homepage: www.eour-wheel light-duty electric
le at ScienceDirect
Energy
vier .com/ locate/apenergy
-
In support of the India National Electric Mobility Mission Plan,
Ener[6], the absence of reliable charging points (which require a stableelectricity grid) in India will make it difcult to achieve the tar-geted levels of EV market penetration. Additionally, if the electric-ity grid is unable to accommodate PEV charging, it is possible thatdiesel generators will be used to provide the unmet electricity de-mand. Although this local distributed generation solution mayaccommodate PEV charging demand in the interim, it is not aneffective way to decouple the Indian transportation sector fromoil and can still lead to urban air quality problems.
The Government of India has recently joined the Electric VehicleInitiative (EVI) of the Clean Energy Ministerial, which seeks to facil-itate the deployment of 20 million EVs by 2020. Under this initia-tive, Lawrence Berkeley National Laboratory is supporting theNEMMP in assessing the real-world costs, benets and environ-mental impacts of EV uptake in India; this publication is the rstin a series of studies in this effort.
To properly plan for the rapid deployment of PEVs in India,there is a need for nely resolved temporal and spatial predictionsof PEV charging load on the electricity grid. The ability to properlyforecast PEV charging load is essential for utility grid operators toensure that adequate generation capacity is available at the correcttimes, and ensure that distribution infrastructure can accommo-date substantial PEV charging. Several studies [713] have devel-oped methods to estimate PEV charging load for the USelectricity grid. The most rigorous of these studies [1416] followa three-step methodology (listed below) to predict temporally re-solved PEV charging load proles. A modeling tool, called V2G-Sim, has been developed at Lawrence Berkeley National Laboratoryto streamline the simulation of vehicle-grid interactions and thistool is available for use in potential research collaborations [17].
1. Estimating the time when vehicles are plugged in: Survey data isused to provide information on how drivers use their vehicles,including number of vehicle trips per day, time of departureof each trip, trip travel length, arrival time of each trip, typeof vehicle, etc. In the United States, a common data source forthis information is the National Household Travel Survey(NHTS) [18], however other data sources have also been used.
2. Estimating the amount of energy required to charge the vehiclebattery: Typically, a simplied vehicle model is used to esti-mate: (a) how much of the vehicle battery is depleted duringeach trip, and (b) howmuch energy is required during charging.A standard approach in prior studies [1416] is to assume aconstant value for electrical consumption (kWh/km or kWh/mile) depending on the type of vehicle (i.e. car, van, SUV, truck,etc.) that is being modeled. More accurate estimates of batterydepletion while driving can be obtained with detailed vehiclephysics models (such as models used in other papers), howeverthis approach may be prohibitively computationally expensivewhen attempting to model hundreds, thousands, or millionsof PEVs on an electricity grid.
3. Estimating charging rates while a vehicle is plugged in: Using esti-mates of when different vehicles will plug in for charging fromstep 1, how much charging is required from step 2, and infor-mation about the charging rate (i.e. level 1, level 2, or DC fastcharger), number of PEVs and any smart charging strategies,aggregate charging load proles are estimated for a large num-ber of vehicles within a given region (i.e. utility service territory,state, or country).
Successful implementation of the NEMMPwithin the prescribedtimeline requires immediate planning and infrastructure deploy-ment to ensure that the Indian electricity grid can cope with the
S. Saxena et al. / Appliedadded charging load from large numbers of PEVs. Thus, the 3-stepanalysis methodology described above must be applied to the In-dian context, however much of the required data for India is notthis study provides critical data to enable detailed predictions ofPEV temporal charging load proles for the Indian electricity grid.Detailed vehicle powertrain modeling is used for:
1. Providing estimates of average electrical consumption(Wh/km) for vehicles that are representative of typicalIndian two-, three- and four-wheel vehicles over drivecycles that are representative of Indian driving conditions.
2. Providing correlations for the Wh/km results that accountfor variations in vehicle use, such as variability in vehiclemass, the use of air conditioners, and variations in power-train component efciency.
3. Vehicle models
3.1. Vehicle powertrain models
A detailed vehicle powertrain model is used to estimate electri-cal consumption for four types of vehicles, with specications foreach vehicle listed in Table 1. The powertrain models are createdin the industry standard Autonomie powertrain modeling platform.
3.2. Drive cycles
Given that energy consumption of a vehicle depends signi-cantly on driving patterns [1925], several different drive cyclesare chosen. Five drive cycles are chosen based on Indian drivingconditions, including a New Delhi cycle [26], Pune cycle [27], themodied Indian drive cycle (MIDC) [28], and an Indian urban andavailable in published studies. For instance, for step 1 better datais required to characterize vehicle usage patterns in India. For step2, average electrical consumption (Wh/km) numbers are requiredfor vehicles specically in the Indian context (i.e. for vehicle sizesrepresentative of typical Indian vehicles driving in Indian trafcconditions). The use of prior published electrical consumption val-ues does not adequately account for typical Indian vehicles or forthe inuence of driving and usage factors (i.e. from dense trafc,or the use of power-consuming devices like an air conditioner).Electrical consumption data for scooters, 3-wheelers, and small4-wheelers has previously been unavailable in the literature, par-ticularly for the Indian context where driving conditions will bedifferent than in developed countries and air conditioning load willbe a signicant factor. For the Indian context in particular, it maybe inappropriate to use prior published Wh/km values becausetwo-wheelers and ultra-compact four-wheelers that are typicalin India are signicantly smaller and lighter than the US market,and typical driving conditions are different in India with more fre-quent stopping, lower average speeds and potentially more suddenacceleration and deceleration [19].
In support of the NEMMP and as a step towards predicting thecharging load of PEVs on the Indian electricity grid, the results pre-sented in this study will enable better estimates of PEV chargingload on the Indian electricity grid. Specically, the results of thisstudy provide Wh/km values that are representative of typicalvehicles in India, driving in conditions representative of Indianroads. The results of this study can then be used in Step 2 of the3-step methodology above to estimate temporally resolved PEVcharging loads on the Indian electricity grid.
2. Specic objectives
gy 115 (2014) 582590 583Indian highway cycle. Additionally three US certication cyclesare also included for comparison purposes, the EPA UDDS, HWFETand US06 cycles [29]. Figs. 14 compare the characteristics of each
-
3-W
5005.466.384.251000
0.352.40
584 S. Saxena et al. / Applied EnerTable 1Vehicle specications used in powertrain models.
Scooter
Base vehicle mass (kg) 150Motor max power output (kW) 1.5Final drive ratio 6.3805Usable battery capacity (kWh) 2.16Tire size 1000 300Drag coefcient 0.60Frontal area (m2) 1.25drive cycle in terms of velocity, stopping/idling, acceleration anddeceleration characteristics. The values in these gures are nor-malized by the average values across all driving cycles to alloweasier comparisons.
Fig. 1 compares the velocity characteristics of the US and Indiandrive cycles. The plot shows that driving conditions on the Indiancycles involve lower maximum speed, lower mean speed, and low-er mean driving speed1. Even the speeds on the Indian highway cy-cle are considerably lower than the speeds on the US highway cycles.
Baseline electrical accessory & AC load (W) 50 100Estimated range in City (km) 6471 608Estimated range on Highway (km) N/A N/ATop speed (km/h) 50 73
Fig. 1. Velocity characteristics of US and Indian drive cycles.
Fig. 2. Stopping/idling characteristics of US and Indian drive cycles.
1 Mean speed is dened as the average of all velocities over the drive cycle. Meandriving speed is dened as the average of all non-zero velocities.heeler Low power 4-wheeler High power 4-wheeler
898 149319 80
05 6.8737 7.93776.54 16.7
4.500 P155/70R13 P205/55 R160.335 0.282.0 2.50
gy 115 (2014) 582590Fig. 2 compares the stopping and idling characteristics of the USand Indian drive cycles. As expected, the results show that stop fre-quency and fraction of total time stopped are much higher on thecity cycles as compared with the highway cycles. Of particularimportance, Fig. 2 shows that stop frequency is much higher inthe Indian city cycles than the US city cycle. The total fraction oftime stopped is highest in the Pune cycle, followed by the US citycycle.
Fig. 3 compares the acceleration characteristics of the US andIndian drive cycles. The highest acceleration values are seen inthe high speed US highway cycle (US06). Comparing the US and In-dian city cycles, it is seen that greater maximum acceleration and
200 2000 7095 123138
3476 73136117 120
Fig. 3. Acceleration characteristics of US and Indian drive cycles.
Fig. 4. Deceleration characteristics of US and Indian drive cycles.
-
maximum acceleration from stop values are encountered in the In-dian city cycles, however the average acceleration is higher in theUS city cycle.
Fig. 4 compares the deceleration characteristics of the US andIndian drive cycles. The results show that maximum deceleration
signicant impact on energy consumption [3031]. Loading the
mates were compared against published measurement data [32]
4. Results
values denote that the vehicle was unable to perform on the drivecycle, either because the drive cycle requests speeds which arehigher than the maximum speed capability of the vehicle, orbecause acceleration proles are demanded which exceed thecapabilities of the powertrain components. Thus, these crossed
on.
eeler Low power 4-wheeler High power 4-wheeler
.50 0.203.0 0.204.0
Table 3Electrical consumption range of each vehicle.
Electrical consumption (Wh/km)
Avg city Avg hwy Range
Scooter 33 38 31403-Wheeler 61 85 5397Low power EV 84 133 70192High power EV 123 164 101224
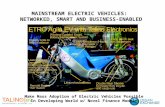
S. Saxena et al. / Applied Energy 115 (2014) 582590 585for the EPA UDDS, Highway, and US06 drive cycles over a rangeof total vehicle mass. Fig. 5 shows a comparison of the modeledand measured electrical consumption values for a Nissan Leaf.
The modeled and experimentally measured electrical consump-tion values plotted in Fig. 5 show that the vehicle powertrain mod-el reasonably predicts both the trends and absolute values ofelectrical consumption for a range of different vehicle masses forall three drive cycles. The largest difference in absolute valuesbetween the model and the experimental measurements is11.50%, which occurs for the lowest vehicle mass on the highwaycycle. It is typically the case that increased vehicle mass leads toincreased energy consumption, however the experimental
Table 2Range of parameter variations explored for their impact on vehicle energy consumpti
Scooter 3-Wh
Ancillary loading (i.e. A/C) (kW) 0.00.30 0.00vehicle with more passengers or cargo will also impact energyconsumption. Additionally, variations in powertrain componentefciency will also impact energy consumption. Table 2 lists therange of parameter variations that were explored using the vehiclepowertrain models for their impact on vehicle energyconsumption.
3.4. Model validation
To ensure that the electrical consumption estimates presentedin the results section of this paper are reasonable, the same mod-eling methodology is followed to create a powertrain model for aNissan Leaf electric vehicle, for which there are well documentedvalues of electrical consumption under various driving conditions.
A vehicle powertrain model was constructed with specicationsresembling a Nissan Leaf, and electrical consumption model esti-and maximum deceleration to stop are higher in Indian city condi-tions than US city conditions, however higher levels of averagedeceleration are seen in the US city cycle.
Summarizing the results in this section, Figs. 14 compared thedrive cycle characteristics for the US and Indian drive cycles. It wasgenerally observed that the Indian drive cycles involve lower driv-ing speeds, greater frequency of stopping, and higher levels ofmaximum acceleration and deceleration. These results suggest thatdriving in India may involve more severe stop-and-go conditions,and previous studies [19,25] have found that these types of drivingconditions create unique opportunities for achieving greater levelsof fuel savings with vehicle electrication.
3.3. Parametric variations
In addition to the vehicle speed proles while driving, otherparameters will signicantly inuence vehicle energy consump-tion as well. The vehicle modeling that is discussed in this papercaptures the impact on vehicle energy usage from several parame-ters that will change with different vehicle designs, usage patterns,and driving conditions. For warm climates like India, ancillarycomponents such as vehicle air conditioning load will have aVehicle mass (kg) 150300 500800Motor efciency (%) 5590 55904.1. Baseline electrical consumption estimates
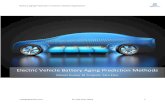
Table 1 lists the vehicle specications that were used in thepowertrain models for an electric scooter, electric 3-wheeler, lowpower EV 4-wheeler and high power EV 4-wheeler. These power-train models provide the electrical consumption per kilometer esti-mates over several different drive cycles in Fig. 6 and Table 3. Thereare several numerical values in Fig. 6 which are crossed out (partic-ularly for the electric scooter and 3-wheeler). These crossed outmeasurements on the highway cycle do not display this expectedtrend. This may be due to experimental error because obviouslythe vehicle mass will have a signicant inuence on the electricityconsumption of a vehicle. This expected trend is indeed seen forthe UDDS and US06 experimental measurements, thus the datapoints at the lowest mass values for the highway cycle seem higherthan expected. As a result of the overall agreement of trends andabsolute values shown in Fig. 5, the modeling methodology is con-sidered accurate enough for the purposes of this study.
Fig. 5. Model validation: comparison of modeled and measured electrical con-sumption for a Nissan Leaf.8981200 149318005590 5590
-
586 S. Saxena et al. / Applied Energy 115 (2014) 582590Fig. 6. Electrical energy consumption rate for different types of EVs on differentdrive cycles.out values should not be given much weight but instead simplyconsidered for reference.
The results in Fig. 6 show that electrical consumption per kilo-meter is highest for the 4-wheelers and lowest for the electricalscooter, which comes as no surprise given the differences in vehi-cle mass. For the vehicles which are capable of sustaining highwayspeeds (i.e. only the 4-wheelers), electrical consumption is signi-cantly higher for high speed highway driving.
Fig. 7. Variation of vehicle electrical consumption with different ancillary compo-nent loading.
Table 4Coefcients for equation of t for impact of ancillary component loading (kW) on vehicle
UDDS HWFET US06
2 Wheeler m 42.35b 32.83R2 1.00
3 Wheeler m 36.47b 65.70R2 1.00
4 Wheeler low power m 35.30 15.43 15.73b 87.86 117.48 189.49R2 1.00 1.00 1.00
4 Wheeler high power m 34.22 14.21 14.70b 128.27 142.42 220.64R2 1.00 1.00 1.004.2. Impact of parameter variations on vehicle electricity consumption
The electrical consumption was calculated for several vehicleson several US and Indian drive cycles in Section 4.1, with specica-tions dened in Table 1. Vehicles on the road, however, will rarelyhave exactly the same specications as those dened in Table 1,thus this section explores how different parameters will impactelectrical consumption of each vehicle.
4.2.1. Ancillary component and air conditioning loadsFor hot climates like India, energy use by air conditioners will
have a signicant impact on the electricity consumption of a vehi-cle. Additionally, other ancillary components (like vehicle controlelectronics, radio, and lights) will consume energy. Fig. 7 presentsthe impact on vehicle electricity consumption from different levelsof loading by ancillary components. As two- and three-wheelerstypically do not have an enclosed cabin they will not have air con-ditioners, and thus their maximum loading from ancillary compo-nents will be lower. Thus, in Fig. 7 the modeled range of energyconsumption from ancillary components for the two- and three-wheel vehicles is much lower than for the four-wheelers.
Fig. 8. Variation of vehicle electrical consumption with different total vehiclemasses.Fig. 7 shows that for each vehicle on all the different drive cy-cles, vehicle electricity consumption (Wh/km) increases linearlywith increasing loading from ancillary components. It is particu-larly important to note that the slope of this linear increase is dif-ferent across the different drive cycles. The equation of t for therelationship between ancillary component loading and vehicleelectricity consumption follows the form of Eq. (1), where x is
electricity consumption (Wh/km).
India urban India highway Delhi Pune MIDC
48.13 61.62 57.59 40.5928.85 30.40 28.84 33.971.00 1.00 1.00 1.00
45.85 22.75 59.28 55.40 34.4250.62 67.15 46.94 50.46 69.801.00 1.00 1.00 1.00 1.00
47.11 23.72 60.64 56.86 34.4967.81 80.78 57.03 69.33 89.801.00 1.00 1.00 1.00 1.00
46.14 22.88 59.57 55.73 33.38112.28 118.40 88.84 113.99 124.401.00 1.00 1.00 1.00 1.00
-
Table 5Coefcients for equation of t for impact of vehicle mass (kg) on vehicle electricity consumption (Wh/km).
UDDS HWFET US06 India urban India highway Delhi Pune MIDC
2 Wheeler m 0.03 0.02 0.02 0.03 0.02b 29.94 28.12 30.88 27.64 32.73R2 1.00 0.95 0.95 0.98 0.96
3 Wheeler m 0.07 0.07 0.05 0.04 0.07 0.04b 34.43 22.27 45.54 32.00 23.64 51.03R2 1.00 1.00 1.00 1.00 1.00 1.00
4 Wheeler low power m 0.07 0.05 0.07 0.07 0.06 0.04 0.07 0.05b 30.87 77.49 127.74 18.62 31.96 32.06 22.60 48.43R2 1.00 1.00 1.00 1.00 1.00 1.00 1.00 1.00
4 Wheeler high power m 0.06 0.04 0.07 0.06 0.05 0.04 0.06 0.05b 44.05 83.86 114.44 31.90 42.89 39.43 37.38 60.272
S. Saxena et al. / Applied Energy 115 (2014) 582590 587R 1.00 1.00 1.00the electrical loading in kW, m is the slope, and b is the y-intercept(in this case, the electrical consumption if there was no loadingfrom ancillary components). Values for m and b for each vehicleon each drive cycle are listed in Table 4.
y mx b 1
The tting equation parameters in Table 4 shows that the slopeof each tting equation for a given drive cycle is not sensitive tovehicle type. The slopes are generally higher for lower speed driv-ing conditions. These results suggest that ancillary component
Fig. 9. Variation of vehicle electrical consumption with different average motoroperating efciency.
Table 6Coefcients for equation of t for impact of motor efciency (%) on vehicle electricity con
UDDS HWFET US06
2 Wheeler m 54.11b 75.97R2 0.99
3 Wheeler m 125.9b 165.3R2 0.99
4 Wheeler low power m 198.8 189.0 319.0b 248.5 271.7 441.8R2 0.99 0.99 1.00
4 Wheeler high power m 304.2 231.1 438.0b 361.7 326.1 568.6R2 0.99 0.99 0.99loading has a greater impact on vehicle electricity consumptionat lower speed driving conditions (i.e. city driving), and is not sen-sitive to vehicle type.
1.00 1.00 1.00 1.00 1.00
Fig. 10. Powertrain architecture for electric vehicle models.4.2.2. Variations in vehicle, passenger and cargo massIndividual vehicles are bound to be loaded with different mass
due to variations in the number of passengers or cargo being car-ried. Fig. 8 shows the impact of variations in total vehicle massfor each vehicle on each drive cycle. The 3- and 4-wheelers willhave greater carrying capacity and thus the range of vehicle massesmodeled is larger for these vehicles.
Fig. 8 shows that vehicle electricity consumption is also linearlydependent on vehicle mass, with increased electricity consumptionfor greater total vehicle mass. The equation of t relating changesin vehicle electrical consumption with changes in vehicle mass fol-lows the form of Eq. (1) as well, with x being vehicle mass in kg.Table 5 lists the coefcients for the equations of t for variationsin vehicle mass. The tting coefcients in Table 5 suggest thatthe impact of vehicle mass on vehicle electricity consumption is
sumption (Wh/km).
India urban India highway Delhi Pune MIDC
50.93 49.53 51.55 54.3469.54 70.89 69.97 77.540.99 0.99 0.99 0.99
106.2 118.2 74.5 99.9 118.0135.6 161.4 110.2 131.3 164.60.99 0.99 0.99 0.99 0.99
286.7 266.0 167.1 274.9 251.1328.7 322.9 219.4 321.1 318.90.99 0.99 0.99 0.99 0.99
268.7 266.0 167.1 274.9 251.1328.7 322.9 219.4 321.1 318.90.99 0.99 0.99 0.99 0.99
-
good t.
Ener5. Conclusions
Given the ambitious targets for electric vehicle deployment inIndia under the National Electric Mobility Mission Plan whichwas announced by the Government of India, there are signicantconcerns with the impact that EV charging will have on an alreadystrained Indian electricity grid. This study is part of a larger efforttowards estimating the impact on the Indian electricity grid fromsubstantial deployment of EVs on the Indian grid to subsequentlyplan the deployment of new generation and distributioninfrastructure.
This study used detailed vehicle powertrain models to estimatethe per kilometer electrical consumption of several types of EVs,including a scooter, a 3-wheeler, a low power 4-wheeler, and ahigh power 4-wheeler. Electrical consumption data for scooters,3-wheelers, and small 4-wheelers has previously been unavailablein the literature, particularly for the Indian context where drivingconditions will be different than in developed countries and airconditioning load will be a signicant factor. The powertrain modelmethodology was validated against experimental measurementsfor a Nissan Leaf. The main conclusions from this study are asfollows:
1. Average electrical consumption: Vehicle size has the greatestimpact on per km electrical consumption, followed by thedriving characteristics (i.e. city vs. highway driving). In citydriving conditions average electrical consumption results were:33 Wh/km for the scooter, 61 Wh/km for the 3-wheeler, 84 Wh/km for the low power 4-wheeler, and 123Wh/km for the highpower 4-wheeler. For highway driving conditions average elec-fairly consistent across the different drive cycles and across the dif-ferent vehicles (especially the 3-wheeler and both 4-wheelers).
4.2.3. Variations in average motor efciencyThe values chosen for the motor efciency maps used for the
baseline vehicle simulations (in Section 4.1) were established tot the Nissan Leaf model validation results in Section 3.4. Electricvehicles released in the Indian market, however, may use differenttypes of motors with different efciency operating proles, thusthis section explores the impact of changes is motor operating ef-ciency. Fig. 9 shows the variation of vehicle electricity consump-tion with average motor operating efciency for the differentvehicles driving on the different drive cycles.
As expected, the results in Fig. 9 show that vehicle electricityconsumption decreases as a more efcient motor is used. A partic-ularly interesting result, however, is that changes in motor ef-ciency have very little impact on electricity consumption for thesmaller vehicles, especially the two-wheeler. This result is of sig-nicant importance as it suggests that the use of less expensivemotors, which may be less efcient, can be used to lower the costof electric scooters while having minimal impact on vehicle elec-tricity consumption (and thus vehicle range). For the larger vehi-cles and for higher speed driving conditions (i.e. on highways),however, motor efciency impacts electrical consumption signi-cantly and thus better motors must be used. The results for the lar-ger vehicles in Fig. 9 show that the relationship between vehicleelectricity consumption and motor efciency is not perfectly linear(i.e. a slight curvature can be seen on the plots), however the R2 t-ting parameters in Table 6 show that a linear equation of the formof Eq. (1), with x being the average motor efciency (%), produces a
588 S. Saxena et al. / Appliedtrical consumption results were: 133Wh/km for the low power4-wheeler, and 165Wh/km for the high power 4-wheeler. Theelectrical consumption and thus on EV range. For larger vehi-cles, however, motor efciency has a signicant impact, withmore efcient motors allowing signicantly reduced electricalconsumption. For larger vehicles there is also an impact of driv-ing characteristics, with higher speed driving conditions show-ing greater variation of electrical consumption with changes inmotor operating efciency.
Acknowledgements
This work was supported by the Assistant Secretary of Policyand International Affairs, Ofce of Policy and International Affairs,of the US Department of Energy and the Regulatory AssistanceProject through the US Department of Energy under Contract No.DE-AC02-05CH11231.
Appendix A.
This Appendix presents a brief description of the powertrainand component models that are used to model the four types ofelectric vehicles considered in this study. For a detailed descriptionof each model, readers are referred to the documentation associ-ated with the commercially available powertrain modeling soft-ware Autonomie, which was used in this study.
A.1. Overall powertrain architecture
The electric vehicle models in Autonomie include the compo-nent models shown in Fig. 10, as well as an overarching propulsionand brake control model.
The propulsion control model translates driver accelerationcommands, which are governed by the specied drive cycle, intomotor torque demands while simultaneously considering vehicleand motor speed, battery state of charge, maximum torque outputbefore wheel slip at a given speed, and loading from ancillarycomponents.
The braking control model performs a similar function of trans-lating driver braking commands, which are governed by the spec-scooter and 3-wheeler were incapable of sustaining highwayspeeds. Readers are referred to Section 4.1 for a detailed break-down of electrical consumption for different driving conditions.
2. Impact of air conditioners and ancillary component loads on elec-trical consumption: Ancillary components have a signicantimpact on electrical consumption, with per km electrical con-sumption increasing linearly with greater ancillary componentloads. The slope of increasing electrical consumption is largerfor lower speed driving conditions (i.e. in cities), but is not sen-sitive to vehicle type.
3. Impact of variations in vehicle mass on electrical consumption: Perkm electrical consumption also increases linearly with increas-ing vehicle mass (i.e. for more passengers or cargo). The slope ofincrease is fairly consistent across different driving conditionsand vehicle types.
4. Impact on variations in motor efciency on electrical consumption:Per km electrical consumption decreases linearly with greatermotor operating efciency, however the slope of this decreaseis highly sensitive to vehicle size. An important nding is thatfor smaller vehicles, like scooters, increasing motor efciencyhas little impact on electrical consumption. As a result, theuse of inexpensive and less efcient motors to minimize thecost of electrical scooters will only have minimal impact on
gy 115 (2014) 582590ied drive cycle, into braking torque demands while consideringseveral factors and constraints. One further function of the braking
-
le for a full range of motor speeds according to experimental data.
ear. Losses from mechanical braking and tire friction are calculated
Enermodel is to specify the braking torque provided by the tractionmotor and the mechanical brakes. In general, braking torque isprovided entirely by the traction motor until the motor orbattery power limits are encountered. Beyond these limits,mechanical braking is used to absorb the remaining required brak-ing torque.
A.2. Battery model
The battery model calculates the state of an individual cell andassumes that all cells operate identically. Cell state of charge (SOC)is calculated according to the coulomb counting approach in Eq.(1):
SOC R
I3600dt AhinitAhmax
1
In Eq. (1), I is the charging or discharging current requested fromthe battery, Ahinit is the amount of energy stored in the batterywhen the model is initialized, and Ahmax is the maximum energystorage capacity of the battery as a function of cell operating tem-perature, as shown in Eq. (2):
Ahmax f Tcell 2
The values for Ahmax are specied in an initialization le using mea-surement data for the maximum capacity of a cell that is dischargedat a C/5 rate.
The open circuit voltage and the internal resistances of the cellon charging or discharging are determined as a function of SOC andcell temperature, as shown in Eq. (3) through Eq. (5) respectively:
VOC f SOC;Tcell 3
Rint;chg f SOC;Tcell 4
Rint;dis f SOC;Tcell 5Open circuit voltage and internal resistance data on charging anddischarging is specied in an initialization le based on experimen-tally measured data. For lithium ion batteries, open circuit cell volt-age typically spans a range from 3.5 to 4.2 V.
The cell output voltage at any given operating condition (i.e. atthe battery terminals) is calculated using Eq. (6) for charging andEq. (7) for discharging:
Vout;chg VOC gcoulIoutRint;chg 6
Vout;dis VOC IoutRint;dis 7gcoul is the coulombic efciency, which for these models is simplyset to 1.0.
A simple thermal model is included as part of the battery modelto estimate the cell operating temperature. The rate of heat gener-ation in a cell is calculated according to Eq. (8) while charging andEq. (9) while discharging:
_Qgen;chg I2outRint;chg VoutIout1 gcoul 8
_Qgen;dis I2outRint;dis 9Heat dissipation is calculated by assuming a fan ows cooling airacross the cells within a pack. Eq. (10) is activated when the celltemperature rises above a specied threshold to cause the batterymanagement system to turn the cooling fan on.
_Qcooling Tmodule air TmoduleThermal resistance 10
S. Saxena et al. / AppliedIn situations where the cooling fan remains off, Eq. (10) is simply setto zero. The module air temperature is calculated using Eq. (11):within this model. Linear force exerted or absorbed by the tires iscalculated using Eq. (13):
F T=rwheels 13In Eq. (13), T is the total input or output torque to the tires, and
rwheels is the wheel radius. Torque input or output is calculatedusing Eq. (14):
T Tin Tbraking Tres 14
In Eq. (14), Tin is the torque input from the vehicle powertrain,The absolute maximum torque output is specied according toa predened value for continuous to peak torque ratio. Themotor efciency map is specied for a full range of torque andspeed points in the initialization le using experimentallymeasured data. The motor model inputs are the command to themotor (i.e. required propulsion torque), the input voltage, andthe motor speed.
The maximum propulsion and regenerative torque capabilitiesof the motor are determined as a function of motor speed. Themaximum torque map (as a function of speed) is specied in thevehicle initialization le. The specied torque map enables maxi-mum torque at low speeds (up to roughly 2000 RPM) and subse-quently decaying maximum torque up to the high speed limits ofthe motor.
Section 4.2.3 of this paper examines the impacts of differentlevels of motor efciency for the vehicles that are modeled. Motorefciency is scaled by multiplying the efciency map specied inthe initialization le by a scaling factor. The scaling factor is de-ned as the ratio of desired maximum motor efciency over themaximum efciency specied in the map dened in the initializa-tion le.
A.4. Torque coupling, nal drive and wheel model
The nal drive and torque coupling models are functionallysimilar, and serve to apply a xed gear reduction ratio to both tor-que and speed by taking into account the losses. The torque cou-pling and nal drive are assumed to be 97% efcient across theentire torque/speed range.
The wheel model serves to transform rotational energy into lin-Tmodule air Tair 1=2_Qcooling
_mcooling airCp;module11
Finally, the module temperature is calculated through the bal-ance of heat generation and heat dissipation rates in Eq. (12),and it is assumed that each cell within the module will have thesame temperature.
Tcell Tmodule R _Qgen _Qcooling
dt
mmoduleCp;module12
A.3. Motor model
The motor model provides the torque demanded by the propul-sion controller, while taking into account the effects of losses androtor inertia. Motor temperature is used to determine the time thatthe motor can spend above the maximum continuous rated torquelevels.
The maximum continuous torque is specied in an initialization
gy 115 (2014) 582590 589Tbraking is the braking torque exerted by the mechanical brakes,and Tres is the resistive torque from tire rolling resistance which iscalculated using a third-order polynomial function of speed. The
-
coefcients for the polynomial are specied in an initialization le [8] Rahman S, Shrestha GB. An investigation into the impact of electric vehicleload on the electric utility distribution system. IEEE Trans Power Deliv1993;8(2):5917. http://dx.doi.org/10.1109/61.216865.
590 S. Saxena et al. / Applied Energy 115 (2014) 582590based on experimentally measured data.
A.5. Chassis model
By balancing the total powertrain output against the totalopposing forces, the linear acceleration and vehicle speed is nallycalculated at the chassis model. Powertrain output (or regenerativeinput) is calculated at earlier sub-models based on the specieddrive cycle and the specied component parameters. Opposingforces include factors such as hill climbing, aerodynamic losses,and tire rolling resistance.
Aerodynamic losses are calculated within the chassis modelusing Eq. (15):
Floss;aero 1=2qCdAV2 15In Eq. (15), q is the density of air, Cd is the vehicle drag coefcient, Ais the frontal area of the vehicle, and V is the vehicle speed.
Opposing force from hill climbing is calculated using Eq. (16):
Floss;hill mg sinh 16In Eq. (16), m is the vehicle mass, g is the acceleration from gravity,and h is the hill grade.
The acceleration of the vehicle is subsequently calculated usingEq. (17):
a Fin Flossmstatic mdynamic 17
In Eq. (17), Fin is the input from the vehicle powertrain, Floss is thesum of all opposing forces, mstatic is the static mass of the vehicleand mdynamic is the dynamic mass of the vehicle from rotating com-ponents. Vehicle speed is calculated by integrating Eq. (17) overtime.
A.6. Ancillary components models
Power losses from ancillary components (such as air condition-ing and electronic in-vehicle equipment) are calculated as a spec-ied continuous power draw. The power that is owed toancillary components is assumed to travel through a power con-verter which maintains its output voltage at the required voltageinput for ancillary components (i.e. 12 V). The power converter isassumed to have 95% conversion efciency.
References
[1] Department of Heavy Industry, Government of India, National Electric MobilityMission Plan 2020, , [accessed19.03.2013].
[2] Foley A, Tyther B, Calnan P, Gallachoir BO. Impacts of Electric Vehicle chargingunder electricity market operations. Appl Energy 2013;101:93102. http://dx.doi.org/10.1016/j.apenergy.2012.06.052.
[3] U.S. Department of Energy, EV Everywhere grand challenge blueprint, 2013,.
[4] The Central Peoples Government of the Peoples Republic of China, Energy-saving and new energy automotive industry development plan, 2012, .
[5] Romero JJ. Blackouts illuminate Indias power problems. IEEE Spectrum2012;49(10):112. http://dx.doi.org/10.1109/MSPEC.2012.6309237.
[6] Hidru MK, Parsons GR, KemptonW, Gardner MP. Willingness to pay for electricvehicles and their attributes. Resour Energy Econ 2011;33(3):686705. http://dx.doi.org/10.1016/j.reseneeco.2011.02.002.
[7] Collins MM, Mader GH. The timing of EV recharging and its effects on utilities.IEEE Trans Vehicular Technol 1983;VT-32(1):907. http://dx.doi.org/10.1109/T-VT.1983.2394.[9] Farmer C, Hines P, Dowds J, Blumsack S. Modeling the impact of increasingPHEV loads on the distribution infrastructure, In: 43rd Hawaii internationalconference on system sciences; 2010, doi:10.1109/HICSS.2010.277.
[10] Denholm P, Kuss M, Margolis RM. Co-benets of large scale plug-in hybridelectric vehicle and solar PV deployment. J Power Sources 2013;236:3506.http://dx.doi.org/10.1016/j.jpowsour.2012.10.007.
[11] Qian K, Zhou C, Allen M, Yuan Y. Modeling of load demand to EV batterycharging in distribution systems. IEEE Trans Power Systems2011;26(2):80210. http://dx.doi.org/10.1109/TPWRS.2010.2057456.
[12] Wang J, Liu C, Ton D, Zhou Y, Kim J, Vyas A. Impact of plug-in hybrid electricvehicles on power systems with demand response and wind power. EnergyPolicy 2011;39(7):401621. http://dx.doi.org/10.1016/j.enpol.2011.01.042.
[13] Wu D, Aliprantis DC, Gkritza K. Electric energy and power consumption bylight-duty plug-in electric vehicles. IEEE Trans Power Systems2011;26(2):73846. http://dx.doi.org/10.1109/TPWRS.2010.2052375.
[14] Kelly JC, MacDonald JS, Keoleian GA. Time-dependent plug-in hybrid electricvehicle charging based on national driving patterns and demographics. ApplEnergy 2012;94:395405. http://dx.doi.org/10.1016/j.apenergy.2012.02.001.
[15] Weiller C. Plug-in hybrid electric vehicle impacts on hourly electricity demandin the United States. Energy Policy 2011;39(6):376678. http://dx.doi.org/10.1016/j.enpol.2011.04.005.
[16] Peterson SB, Whitacre JF, Apt J. Net air emissions from electric vehicles: theeffect of carbon price and charging strategies. Environ Sci Technol2011;45(5):17927. http://dx.doi.org/10.1021/es102464y.
[17] Lawrence Berkeley National Laboratory, V2G-Sim - A platform forunderstanding vehicle-to-grid integration, .
[18] U.S. Department of Transportation, National Household Travel Survey, , [accessed 19.03.2013].
[19] Saxena S, Phadke A, Gopal A, Srinivasan V. Understanding fuel savingsmechanisms from hybrid vehicles to inform optimal battery sizing for India.Int J Powertrains IJPT-44428 2013;1:23.
[20] Ericsson E. Independent driving pattern factors and their inuence on fuel-useand exhaust emission factors. Transport Res Part D: Transport Environ2001;6(5):32545. http://dx.doi.org/10.1016/S1361-9209(01)00003-7.
[21] Kudoh Y, Ishitani H, Matsuhashi R, Yoshida Y, Morita K, Katsuki S, et al.Environmental evaluation of introducing electric vehicles using a dynamictrafc-ow model. Appl Energy 2001;69(2):14559. http://dx.doi.org/10.1016/S0306-2619(01)00005-8.
[22] Joumard R, Andr M, Vidon R, Tassel P, Pruvost C. Inuence of driving cycles onunit emissions from passenger cars. Atmos Environ 2000;34(27):46218.http://dx.doi.org/10.1016/S1352-2310(00)00118-7.
[23] Hansen JQ, Winther M, Sorenson SC. The inuence of driving patterns on petrolpassenger car emissions. Sci Total Environ 1995;169(13):12939. http://dx.doi.org/10.1016/0048-9697(95)04641-D.
[24] Wang H, Fu L, Zhou Y, Li H. Modelling of the fuel consumption for passengercars regarding driving characteristics. Transport Res Part D: Transport Environ2008;13(7):47982. http://dx.doi.org/10.1016/j.trd.2008.09.002.
[25] Saxena S, Gopal A, Phadke A. Understanding the Fuel Savings Potential fromdeploying hybrid cars in China. Appl Energy 2014;113:112733. http://dx.doi.org/10.1016/j.apenergy.2013.08.057.
[26] Chugh S, Kumar P, Muralidharan M. et al. Development of Delhi driving cycle:a tool for realistic assessment of exhaust emissions from passenger cars inDelhi. SAE technical paper 201201-0877; 2012. doi:10.4271/2012-01-0877.
[27] Kamble SH, Mathew TV, Sharma GK. Development of real-world drive cycle:case study of Pune, India. Transport Res Part D: Transport Environ2009;14(2):13240. http://dx.doi.org/10.1016/j.trd.2008.11.008.
[28] Automotive Research Association of India, Testing type approval andconformity of production (COP) of vehicles for emission as per CMV rules115, 116 and 126, Chapter 3, Doc. No. MoRTH/CMVR/TAP-115/116, Issue 4, pp.914, .
[29] Environmental Protection Agency, Detailed Test Information, , [accessed 18.06.2013].
[30] Johnson VH. Fuel used for vehicle air conditioning: a state-by-state thermalcomfort-based approach, SAE technical paper 200201-1957; 2002.doi:10.4271/2002-01-1957.
[31] Lukic SM, Emadi A. Performance analysis of automotive power systems: effectsof power electronic intensive loads and electrically-assisted propulsionsystems. IEEE Vehicular Technol Conf 2002;56(3):18359. http://dx.doi.org/10.1109/VETECF.2002.1040534.
[32] Carlson RB, Lohse-Busch H, Diez J, Gibbs J. The measured impact of vehiclemass on road load forces and energy consumption for a BEV, HEV, and ICEVehicle. SAE Int J Alternat Powertrains 2013;2(1):10514. http://dx.doi.org/10.4271/2013-01-1457.
Electrical consumption of two-, three- and four-wheel light-duty electric vehicles in India1 Introduction2 Specific objectives3 Vehicle models3.1 Vehicle powertrain models3.2 Drive cycles3.3 Parametric variations3.4 Model validation
4 Results4.1 Baseline electrical consumption estimates4.2 Impact of parameter variations on vehicle electricity consumption4.2.1 Ancillary component and air conditioning loads4.2.2 Variations in vehicle, passenger and cargo mass4.2.3 Variations in average motor efficiency
5 ConclusionsAcknowledgementsAppendix A.A.1 Overall powertrain architectureA.2 Battery modelA.3 Motor modelA.4 Torque coupling, final drive and wheel modelA.5 Chassis modelA.6 Ancillary components models
References