
Efficient Solution of Language Equations Using Partitioned Representations
20
Efficient Solution of Language Equations Using Partitioned Representations Alan Mishchenko UC Berkeley, US Robert Brayton UC Berkeley, US Roland Jiang UC Berkeley, US Tiziano Villa DIEGM, University of Udine, Italy Nina Yevtushenko Tomsk State University, Tomsk, Russia
-
Upload
jolene-moon -
Category
Documents
-
view
13 -
download
1
description
Efficient Solution of Language Equations Using Partitioned Representations. Alan Mishchenko UC Berkeley, US Robert Brayton UC Berkeley, US Roland Jiang UC Berkeley, US Tiziano Villa DIEGM, University of Udine, Italy - PowerPoint PPT Presentation
Transcript of Efficient Solution of Language Equations Using Partitioned Representations
Efficient Solution of Language Equations Using Partitioned
Representations
Alan Mishchenko UC Berkeley, USRobert Brayton UC Berkeley, USRoland Jiang UC Berkeley, USTiziano Villa DIEGM, University of Udine, ItalyNina Yevtushenko Tomsk State University, Tomsk, Russia
2
Overview
• Problem formulation• Example: Traffic light controller• Partitioned representation• Solution based on partitioned representation• Experimental results• Conclusion
3
Problem Formulation
FixedFixed
UnknownUnknown
ii oo
uuvv
Spec
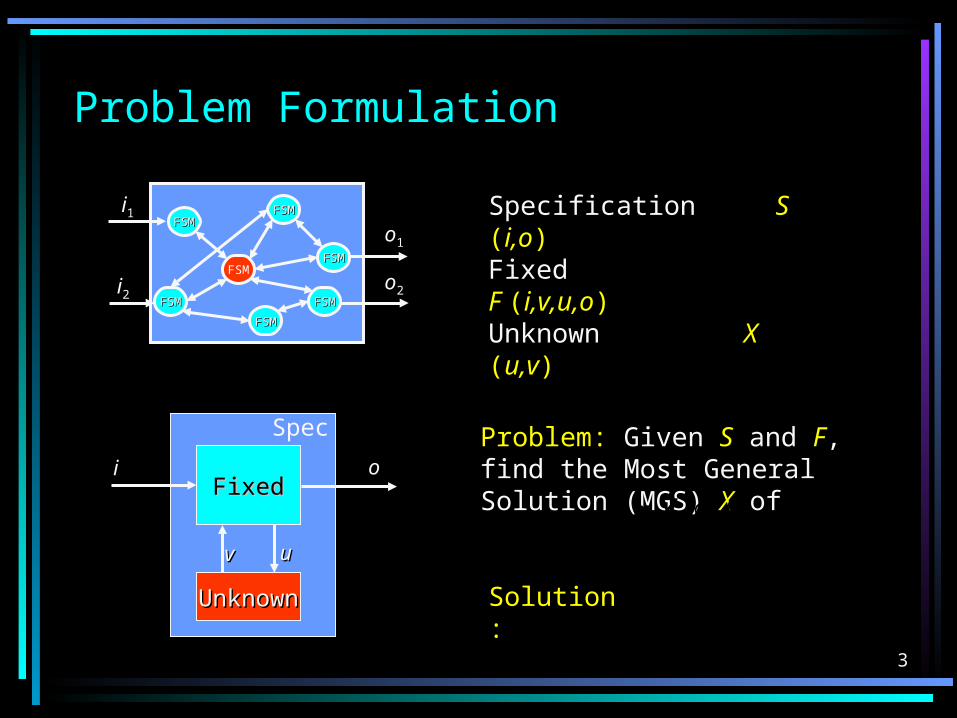
Specification Specification S S ((i,oi,o))Fixed Fixed F F ((i,v,u,oi,v,u,o))Unknown Unknown X X ((u,vu,v))
Problem:Problem: Given Given SS and and FF, find , find the Most General Solution the Most General Solution (MGS) (MGS) XX of of
SFX
SXF
Solution:Solution:
FSMFSM
FSMFSMFSM
FSMFSM
FSMFSM
FSMFSM
FSMFSMii11
ii22
oo11
oo22
4
Combinational and Sequential Flexibility
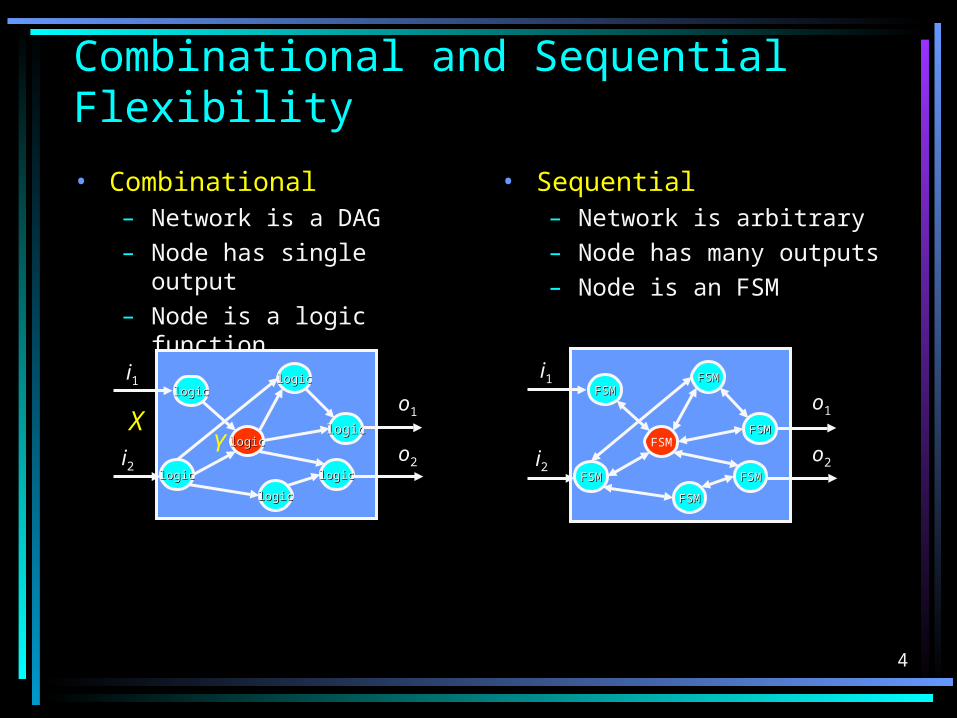
• Combinational– Network is a DAG– Node has single output– Node is a logic function
• Sequential– Network is arbitrary– Node has many outputs– Node is an FSM
( ) ( , ) ( )[ ]xCDC Y M X Y ODC X
FSMFSM
FSMFSMFSM
FSMFSM
FSMFSM
FSMFSM
FSMFSMii11
ii22
oo11
oo22
logiclogic
logiclogiclogiclogic
logiclogic
logiclogic
logiclogic
logiclogicii11
ii22
oo11
oo22
SFX
XY
5
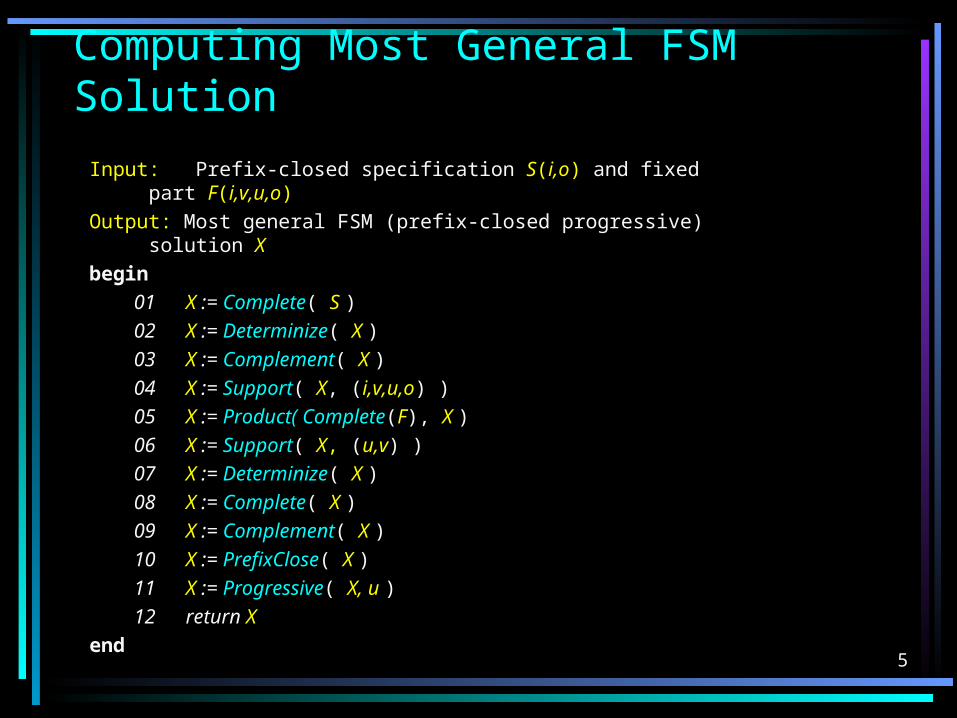
Computing Most General FSM Solution
Input: Prefix-closed specification S(i,o) and fixed part F(i,v,u,o)
Output: Most general FSM (prefix-closed progressive) solution X
begin01 X := Complete( S )02 X := Determinize( X )03 X := Complement( X )04 X := Support( X, (i,v,u,o) )05 X := Product( Complete(F), X )06 X := Support( X, (u,v) )07 X := Determinize( X )08 X := Complete( X )09 X := Complement( X ) 10 X := PrefixClose( X )11 X := Progressive( X, u ) 12 return X
end
6
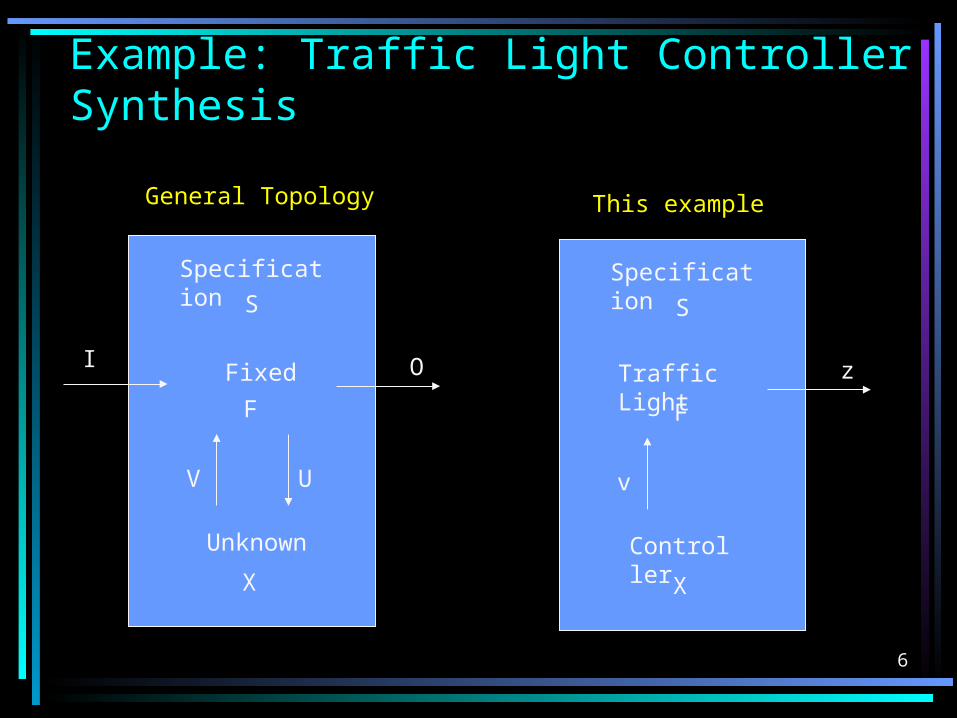
Example: Traffic Light Controller Synthesis
SFX I O
UV
Fixed
Unknown
F
X
Specification
S
SFX z
v
Traffic Light
Controller
F
X
Specification
S
General Topology This example

7
SFX z
v
Traffic Light
Controller
F
X
SpecificationS
Traffic Light Controller (Fixed Part).model fixed.inputs v z.outputs Acc.mv v 2 wait go.mv z 3 red green yellow.mv CS, NS 3 Fr Fg Fy.latch NS CS.reset CSFr.table ->Acc1.table v z CS ->NSwait red Fr Frgo red Fr Fgwait green Fg Fggo green Fg Fywait yellow Fy Fygo yellow Fy Fr.end
z = {red, green, yellow}
v = {wait, go}
8
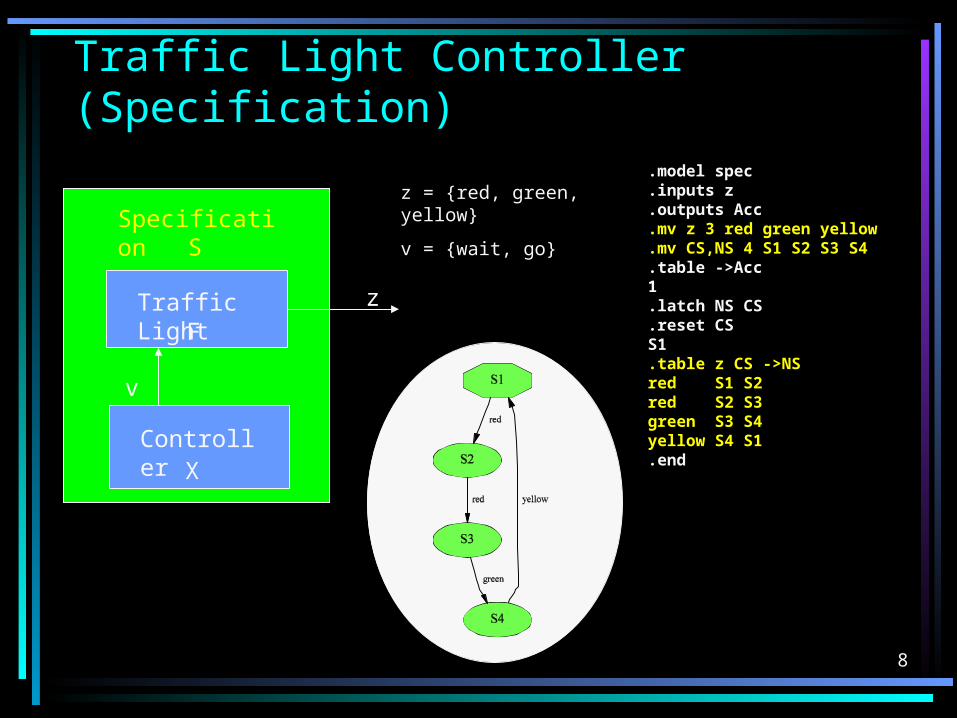
Traffic Light Controller (Specification)
.model spec
.inputs z
.outputs Acc
.mv z 3 red green yellow
.mv CS,NS 4 S1 S2 S3 S4
.table ->Acc1.latch NS CS.reset CSS1.table z CS ->NSred S1 S2red S2 S3green S3 S4yellow S4 S1.end
SFX z
v
Traffic Light
Controller
F
X
SpecificationS
z = {red, green, yellow}
v = {wait, go}
9
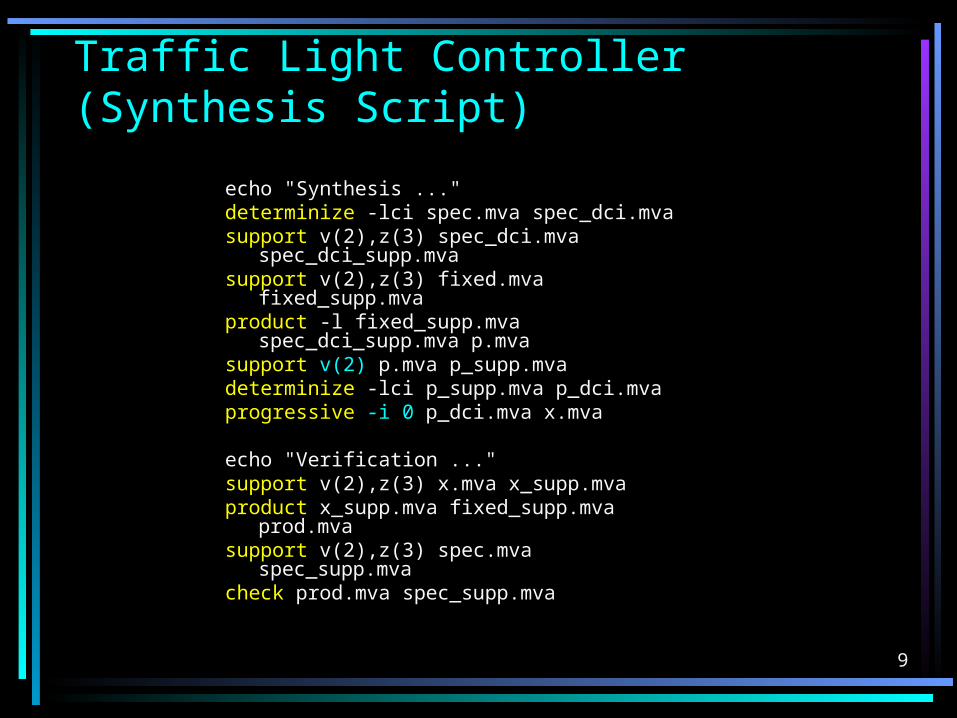
Traffic Light Controller (Synthesis Script)
echo "Synthesis ..."determinize -lci spec.mva spec_dci.mvasupport v(2),z(3) spec_dci.mva
spec_dci_supp.mvasupport v(2),z(3) fixed.mva fixed_supp.mvaproduct -l fixed_supp.mva
spec_dci_supp.mva p.mvasupport v(2) p.mva p_supp.mvadeterminize -lci p_supp.mva p_dci.mvaprogressive -i 0 p_dci.mva x.mva
echo "Verification ..."support v(2),z(3) x.mva x_supp.mvaproduct x_supp.mva fixed_supp.mva
prod.mvasupport v(2),z(3) spec.mva spec_supp.mvacheck prod.mva spec_supp.mva
10
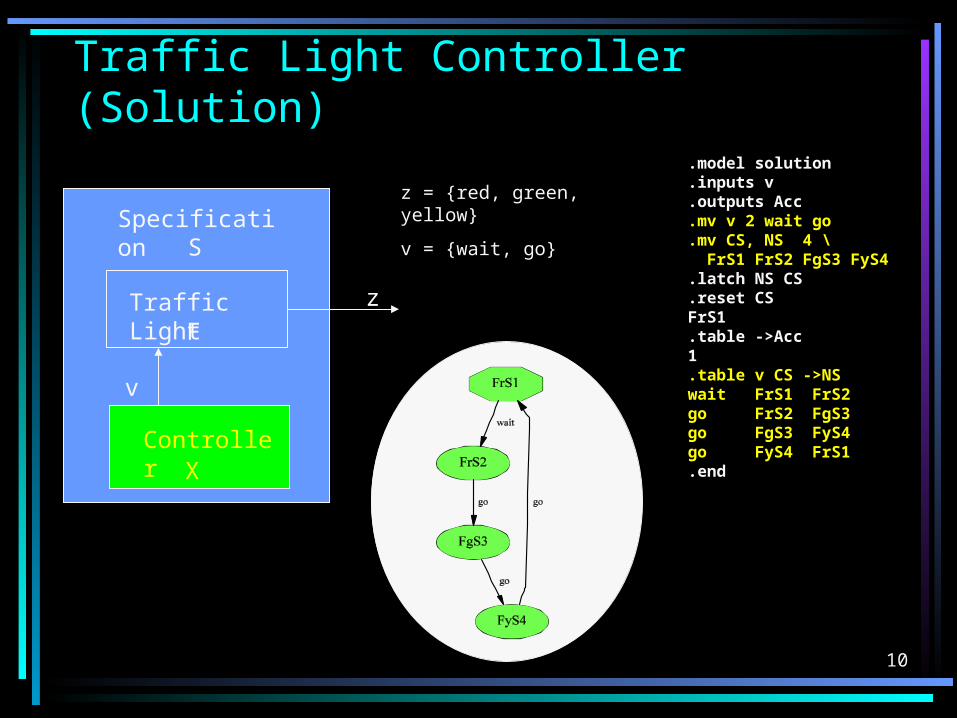
Traffic Light Controller (Solution).model solution.inputs v.outputs Acc.mv v 2 wait go.mv CS, NS 4 \ FrS1 FrS2 FgS3 FyS4.latch NS CS.reset CSFrS1.table ->Acc1.table v CS ->NSwait FrS1 FrS2go FrS2 FgS3go FgS3 FyS4go FyS4 FrS1.end
z = {red, green, yellow}
v = {wait, go}
SFX z
v
Traffic Light
Controller
F
X
SpecificationS
11
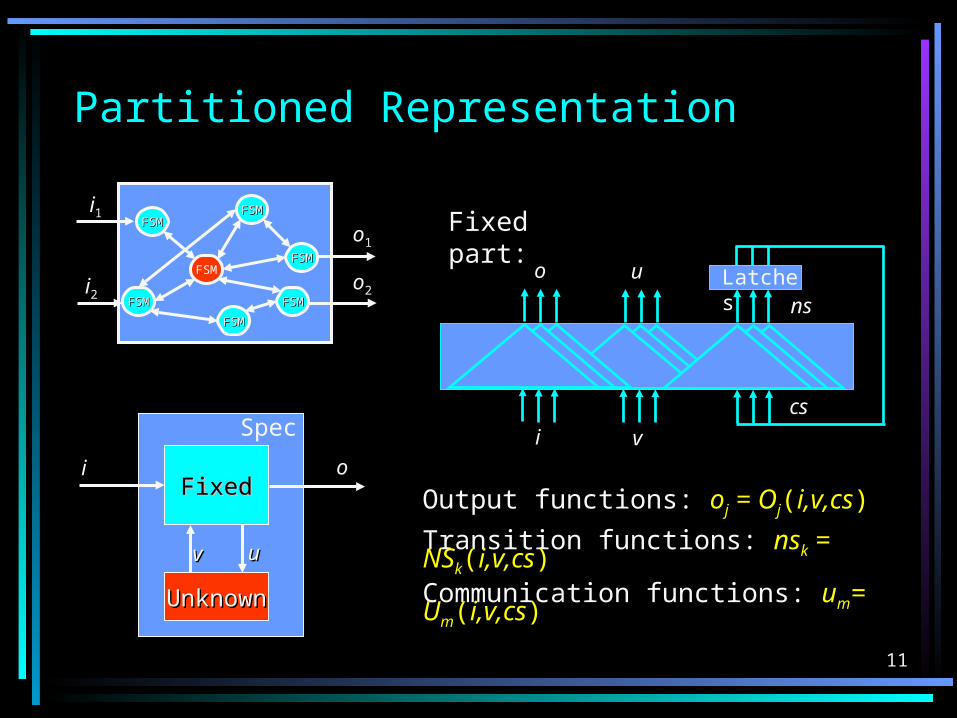
Partitioned Representation
FixedFixed
UnknownUnknown
ii oo
uuvv
Spec
FSMFSM
FSMFSMFSM
FSMFSM
FSMFSM
FSMFSM
FSMFSMii11
ii22
oo11
oo22Latchesuu
vv
oo
ii
nsns
cscs
Output functions: oj = Oj(i,v,cs)
Transition functions: nsk = NSk(i,v,cs)Communication functions: um= Um(i,v,cs)
Fixed part:
12
Computing with Partitioned Representation
• Completion• Complementation• Product computation• Changing support• Determinization (subset construction)
13
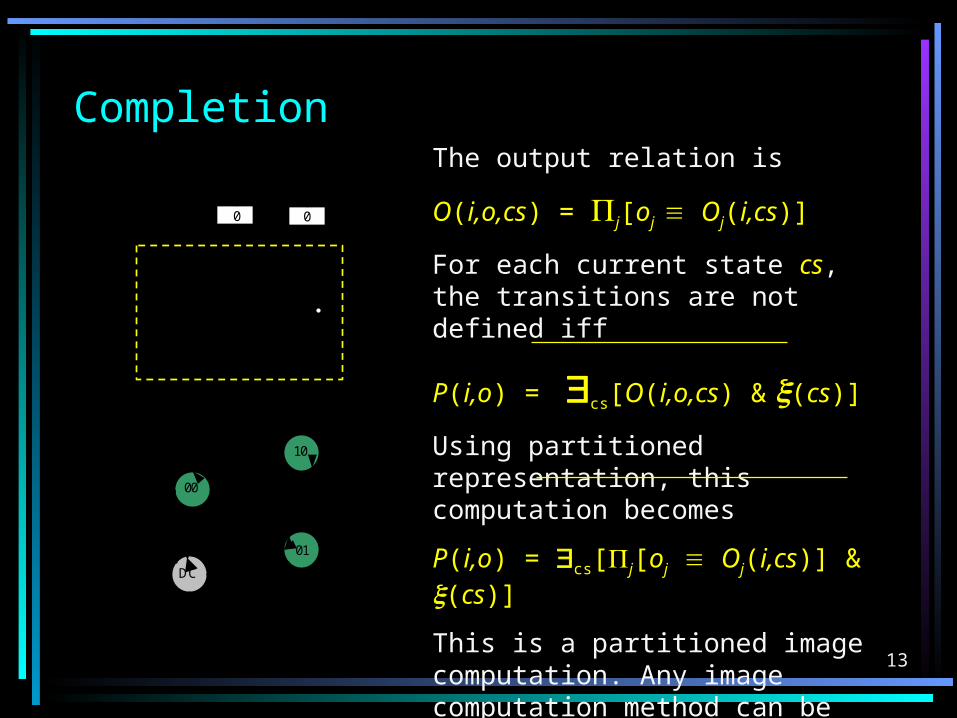
Completion
o
i
ns1 ns2
cs2 cs1
0 0
00
10
01
10
00
-1 11
01
-0
-1
-0
--
DC
The output relation is
O(i,o,cs) = j[oj Oj(i,cs)]
For each current state cs, the transitions are not defined iff
P(i,o) = cs[O(i,o,cs) & (cs)]
Using partitioned representation, this computation becomes
P(i,o) = cs[j[oj Oj(i,cs)] & (cs)]
This is a partitioned image computation. Any image computation method can be used.
14
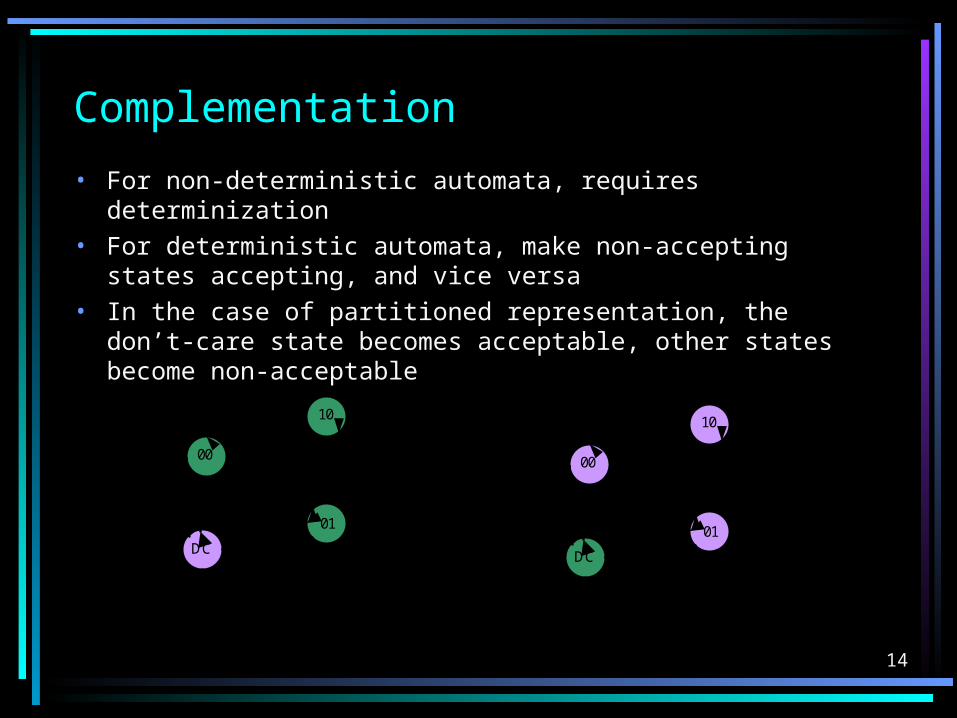
Complementation
• For non-deterministic automata, requires determinization• For deterministic automata, make non-accepting states
accepting, and vice versa• In the case of partitioned representation, the don’t-care
state becomes acceptable, other states become non-acceptable
00
10
01
10
00
-1 11
01
-0
-1
-0
--
DC
00
10
01
10
00
-1 11
01
-0
-1
-0
--
DC
15
Product Computation
• Combine the partitions of the two components
16
Changing Support (Lifting and Projecting)
• Expanding support is trivial• Reducing support requires existential
quantification– In general, cannot be done on the partitioned
representation– Therefore, postponed until the determinization step
17
Determinization (Subset Construction)
Start with the subset containing only the initial state.For each subset , compute the subsets reachable through (u, v).
Define the acceptance relation:
Compute the condition of the transition is into non-accepting states:
Restrict the transitions to those that are not contained in Q(u, v):
Direct the transition under Q(u, v) to DCN.Complete and redirect the remaining transitions to DCA.
( , , ) ( , , , ) ( , , , ) ( )cs iP u v ns U i v cs u T i v cs ns cs
1 2( , , ) [ ( , , ) ( , )]F Sjk jk
j k
C i v cs O i v cs O i cs
, 1( , ) [ ( , , , ) ( , , ) ( )]i csQ u v U i v cs u C i v cs cs
( , , ) ( , , ) & ( , )P u v ns P u v ns Q u v
18
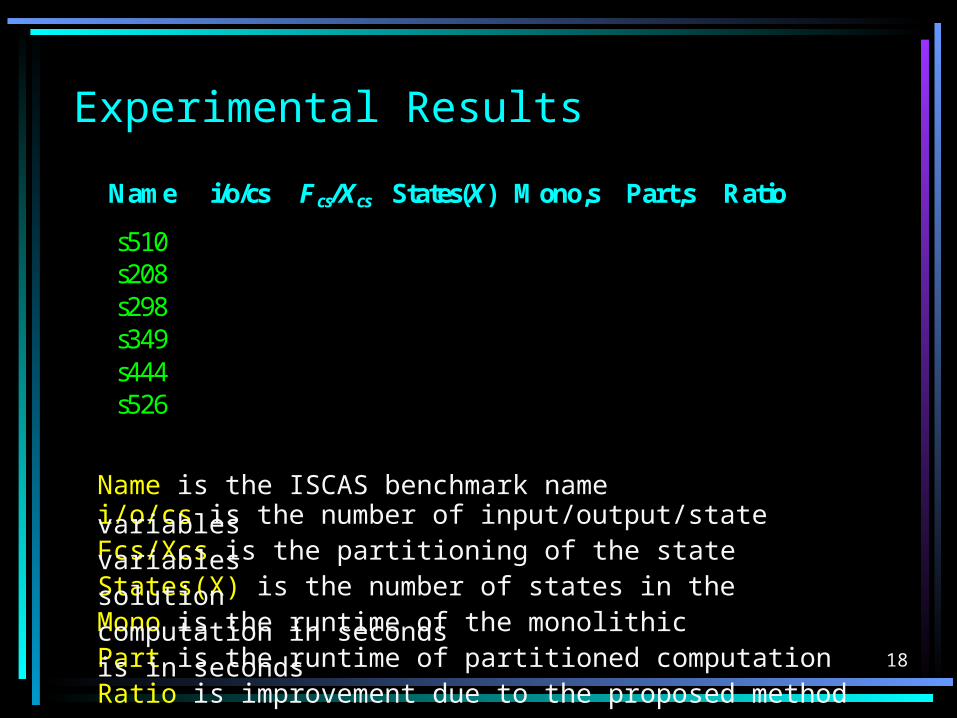
Experimental Results
Name i/o/cs Fcs/Xcs States(X) Mono,s Part,s Ratio
s510 19/7/6 3/3 54 0.2 0.3 0.7 s208 10/1/8 4/4 497 0.8 0.4 2.0 s298 3/6/14 7/7 553 2.7 0.9 3.0 s349 9/11/15 5/10 2626 810.3 37.7 21.5 s444 3/6/21 5/16 17730 CNC 25.9 - s526 3/6/21 5/16 141829 CNC 276.7 -
Name is the ISCAS benchmark namei/o/cs is the number of input/output/state variablesFcs/Xcs is the partitioning of the state variablesStates(X) is the number of states in the solutionMono is the runtime of the monolithic computation in secondsPart is the runtime of partitioned computation is in secondsRatio is improvement due to the proposed method
19
Conclusions
• Introduced language solving problems• Showed a simple example• Discussed partitioned representation• Presented experimental results
20
Future Work
• Developing methods for finding a particular solution contained in the most general solution
• Developing efficient sequential synthesis methods without state space traversal


















