
Efficient Acquisition and Realistic Rendering of Car Paint
24
Efficient Acquisition and Realistic Rendering of Car Paint Johannes Günther, Tongbo Chen, Michael Goesele, Ingo Wald, and Hans-Peter Seidel MPI Informatik Saarbrücken, Germany
-
Upload
colleen-beach -
Category
Documents
-
view
63 -
download
0
description
Efficient Acquisition and Realistic Rendering of Car Paint. Johannes Günther, Tongbo Chen, Michael Goesele, Ingo Wald, and Hans-Peter Seidel MPI Informatik Saarbrücken, Germany. Motivation. Virtual prototyping, car design by computer Mainly two materials - PowerPoint PPT Presentation
Transcript of Efficient Acquisition and Realistic Rendering of Car Paint
Efficient Acquisition andRealistic Rendering of Car Paint
Johannes Günther, Tongbo Chen, Michael Goesele,
Ingo Wald, and Hans-Peter Seidel
MPI Informatik
Saarbrücken, Germany
November 18, 2005 VMV, Erlangen, Germany 2
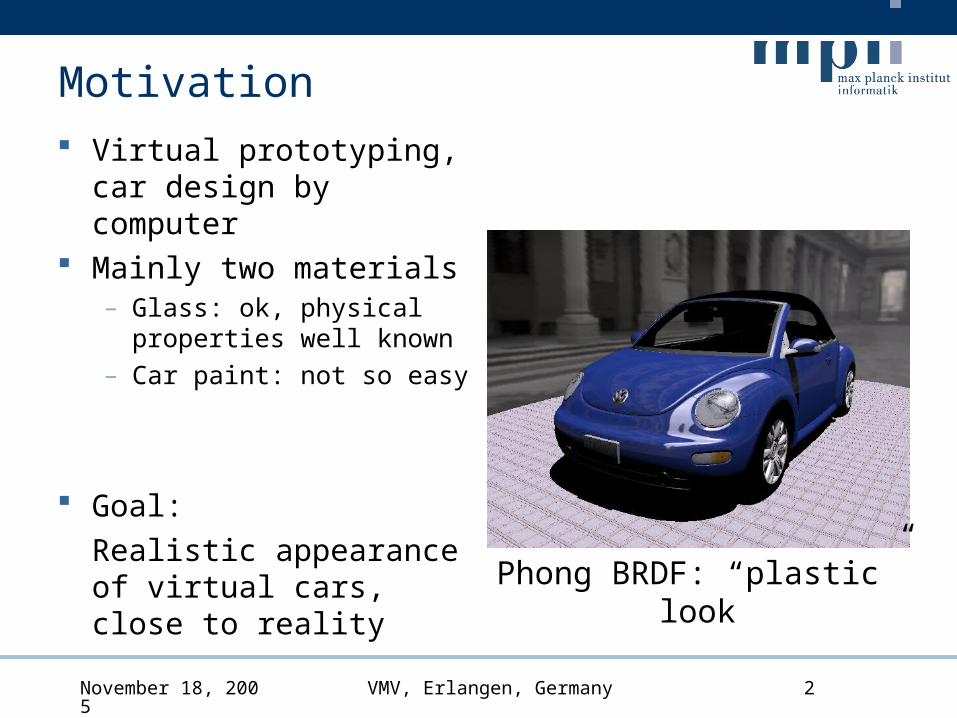
Motivation
Virtual prototyping, car design by computer
Mainly two materials– Glass: ok, physical
properties well known– Car paint: not so easy
Goal:
Realistic appearance of virtual cars, close to reality Phong BRDF: “plastic” look
November 18, 2005 VMV, Erlangen, Germany 3
Introduction & Previous Work Efficient Acquisition
– Measurement Setup– BRDF Representation and Modelling
Realistic Rendering– BRDF Evaluation– Illumination– Simulation of Sparkling
Results Conclusion & Future Work
Outline
November 18, 2005 VMV, Erlangen, Germany 4
Previous Work
BRDF Acquisition [Marschner ‘98, Matusik ‘03]– Image based, automatic fast
Car paint [Ershov ‘01, ‘04]– Complex models, many effects– Not designed for animation context
Illumination by Environment Maps [Debevec ‘98] Realtime Ray Tracing [Wald ’01, ‘04]
November 18, 2005 VMV, Erlangen, Germany 5
Introduction & Previous Work Efficient Acquisition Realistic Rendering Results Conclusion & Future Work
Outline
November 18, 2005 VMV, Erlangen, Germany 6
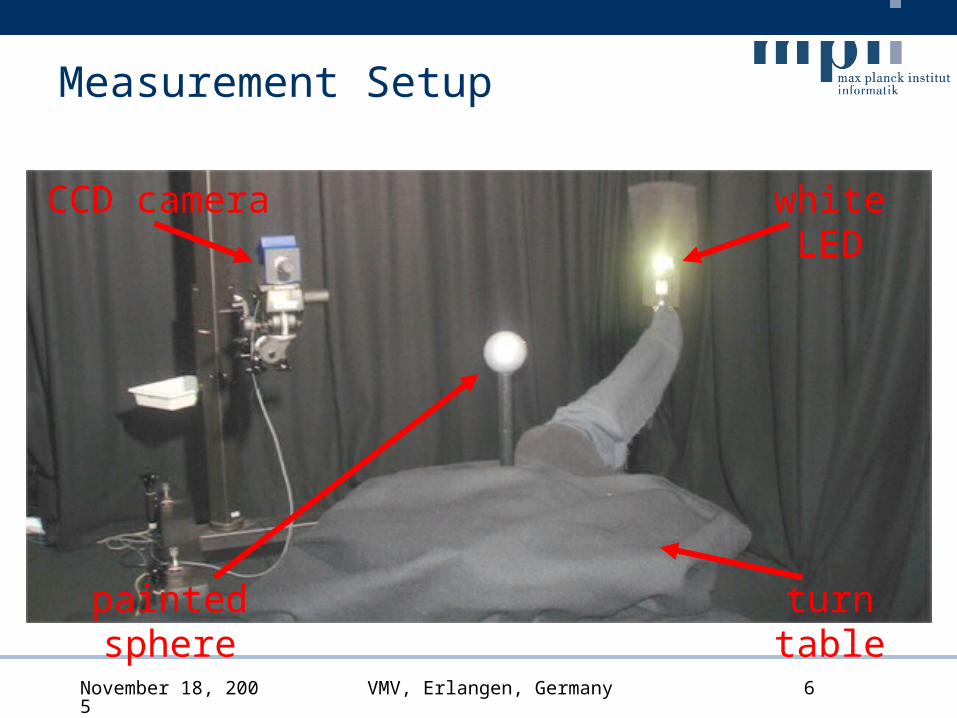
Measurement Setup
CCD camera white LED
turn tablepainted sphere
November 18, 2005 VMV, Erlangen, Germany 7
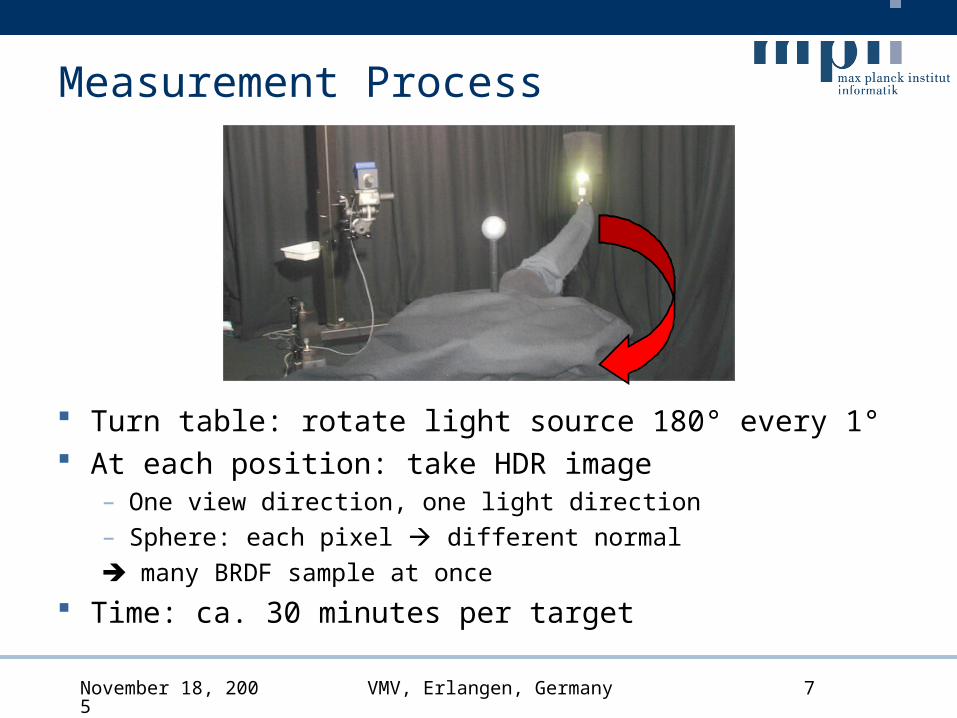
Measurement Process
Turn table: rotate light source 180° every 1° At each position: take HDR image
– One view direction, one light direction– Sphere: each pixel different normal
many BRDF sample at once
Time: ca. 30 minutes per target
November 18, 2005 VMV, Erlangen, Germany 8
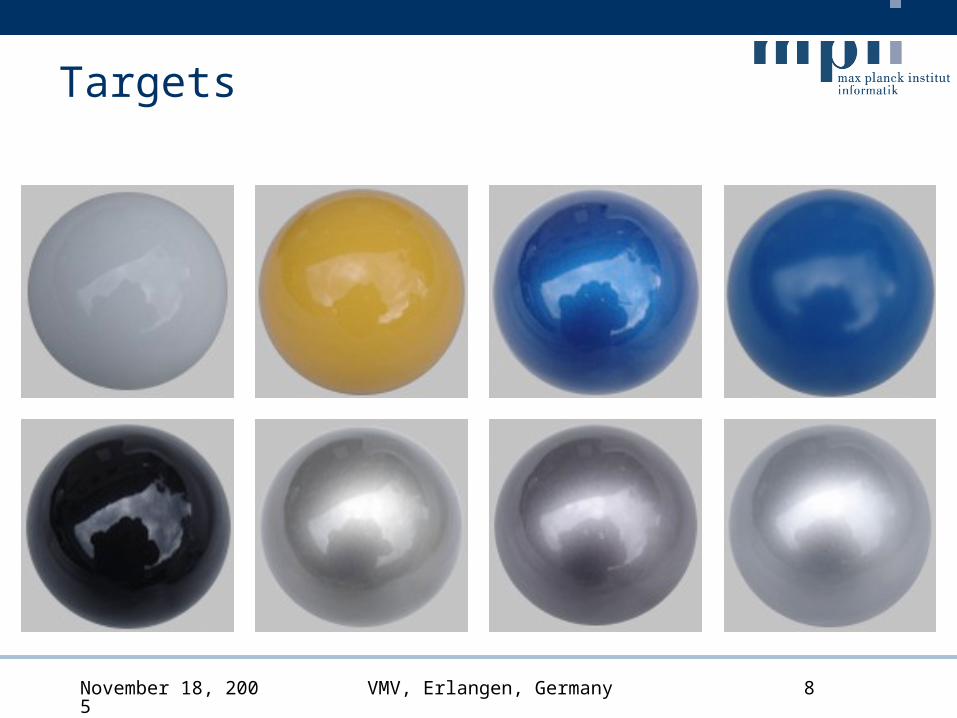
Targets
November 18, 2005 VMV, Erlangen, Germany 9
Modeling
Use Cook-Torrance BRDF– physically derived (micro facets)– showed to perform well [Ngan EGSR ‘05]
Non-linear fitting Multiple lobes to account for nature of car paints
November 18, 2005 VMV, Erlangen, Germany 10
refle
cta
nce
φ
Modeling
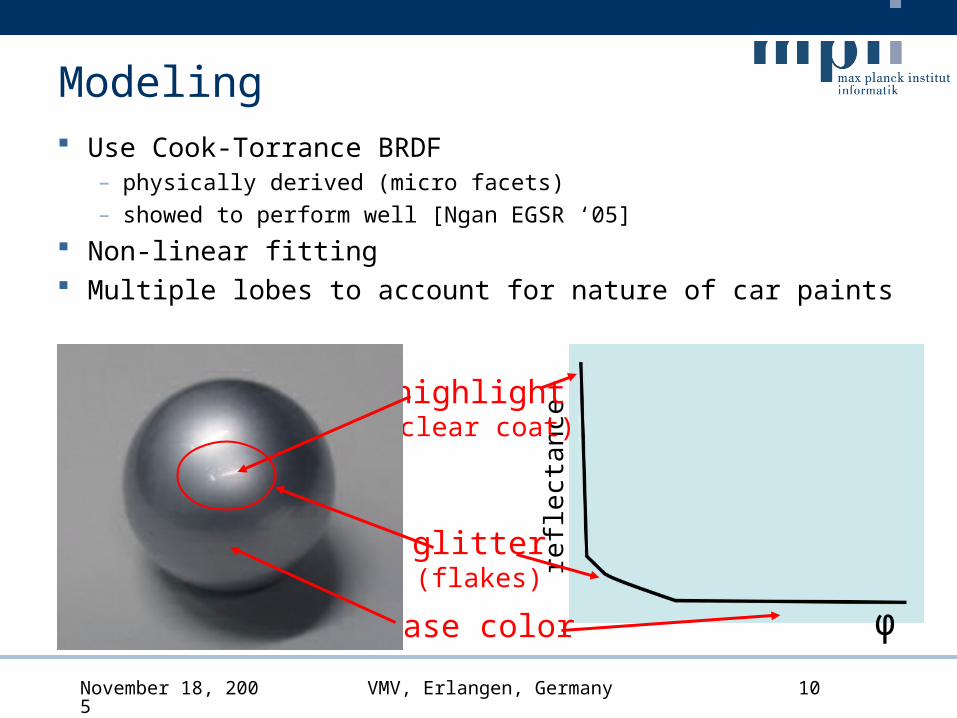
Use Cook-Torrance BRDF– physically derived (micro facets)– showed to perform well [Ngan EGSR ‘05]
Non-linear fitting Multiple lobes to account for nature of car paints
base color
highlight(clear coat)
glitter(flakes)
November 18, 2005 VMV, Erlangen, Germany 11
Introduction & Previous Work Efficient Acquisition Realistic Rendering Results Conclusion & Future Work
Outline
November 18, 2005 VMV, Erlangen, Germany 12
Complex Illumination
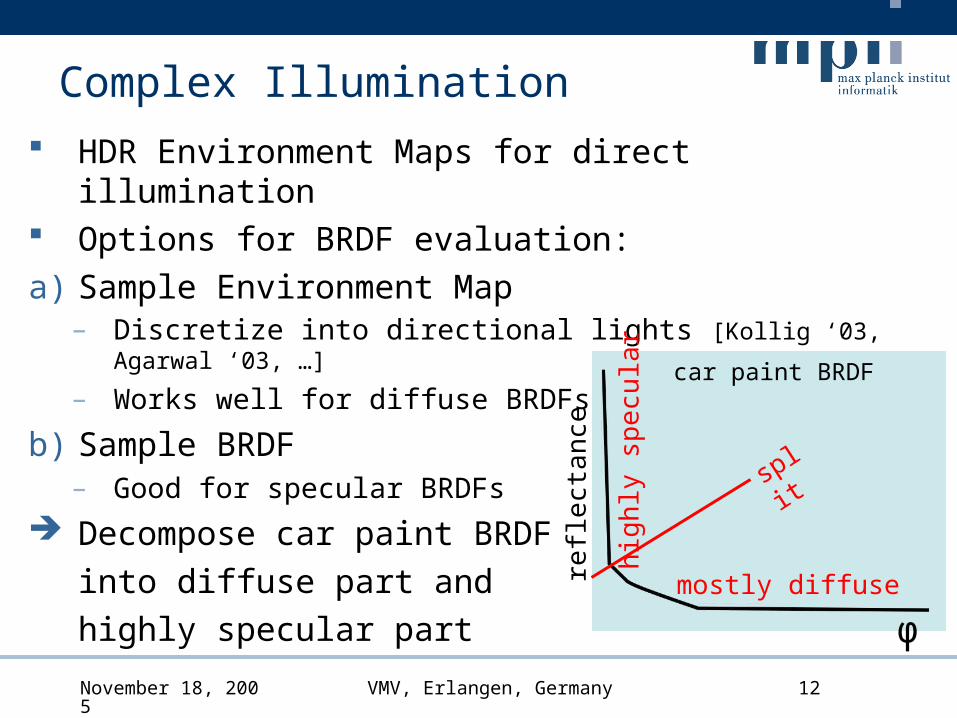
HDR Environment Maps for direct illumination Options for BRDF evaluation:
a) Sample Environment Map– Discretize into directional lights [Kollig ‘03, Agarwal ‘03, …]
– Works well for diffuse BRDFs
b) Sample BRDF– Good for specular BRDFs
Decompose car paint BRDF
into diffuse part and
highly specular partre
flect
an
ce
φ
split
hig
hly
sp
ecu
lar
mostly diffuse
car paint BRDF
November 18, 2005 VMV, Erlangen, Germany 13
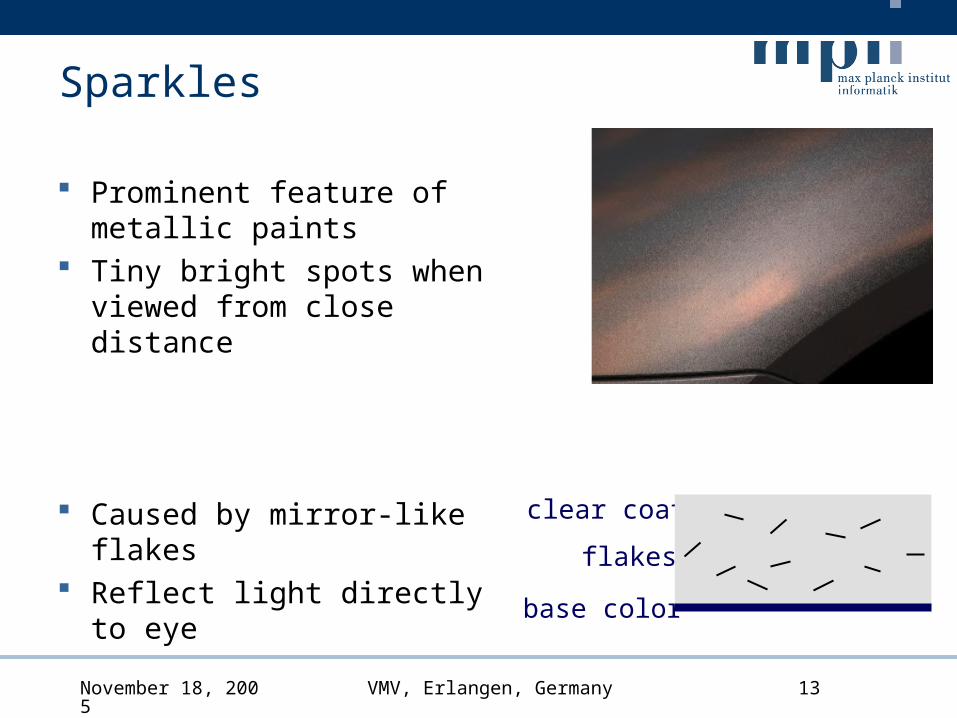
Sparkles
Prominent feature of metallic paints
Tiny bright spots when viewed from close distance
Caused by mirror-like flakes Reflect light directly to eye
base color
flakes
clear coat
November 18, 2005 VMV, Erlangen, Germany 14
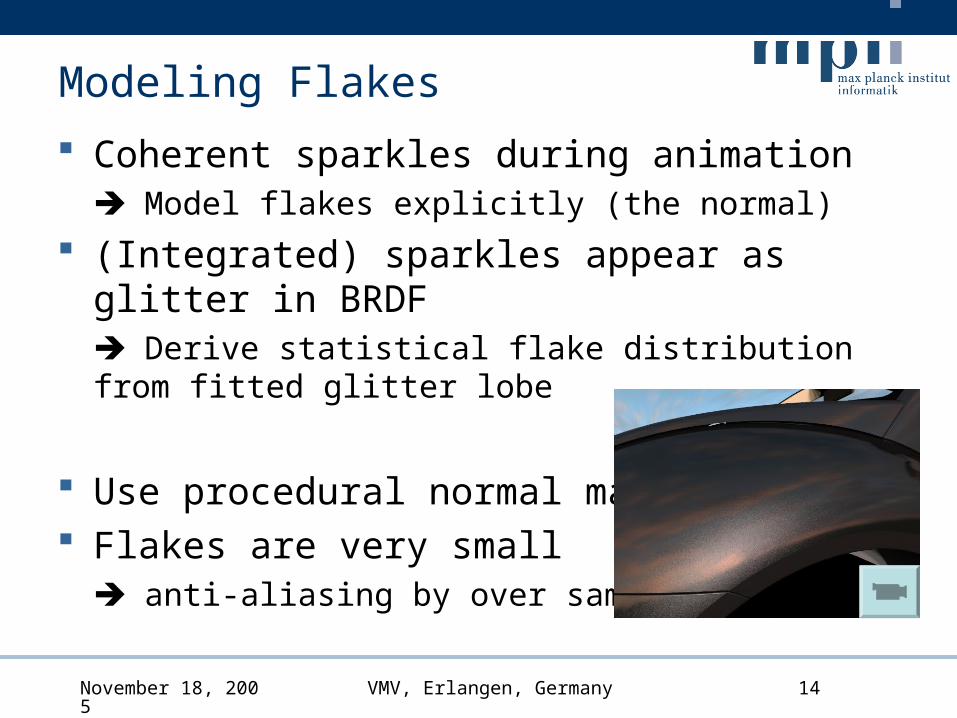
Modeling Flakes
Coherent sparkles during animation Model flakes explicitly (the normal)
(Integrated) sparkles appear as glitter in BRDF Derive statistical flake distribution from fitted glitter lobe
Use procedural normal map Flakes are very small
anti-aliasing by over sampling
November 18, 2005 VMV, Erlangen, Germany 15
Introduction & Previous Work Efficient Acquisition Realistic Rendering Results Conclusion & Future Work
Outline
November 18, 2005 VMV, Erlangen, Germany 16
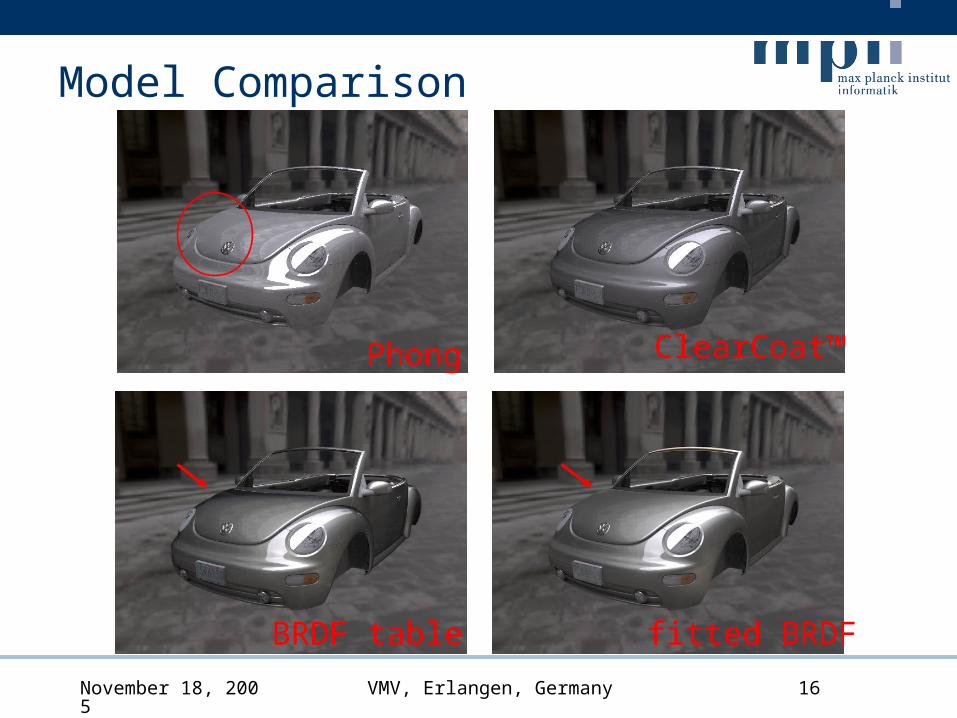
Model Comparison
Phong ClearCoat™
BRDF table fitted BRDF
November 18, 2005 VMV, Erlangen, Germany 17
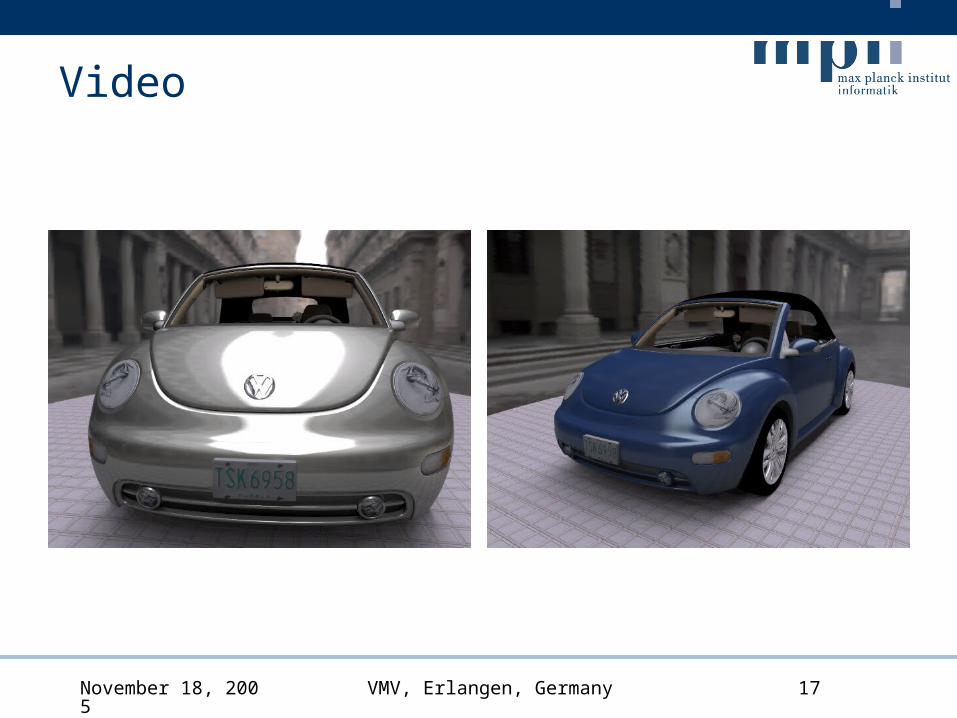
Video
November 18, 2005 VMV, Erlangen, Germany 18
Conclusion
Easy-to-build and fast acquisition systemMeasured car paint and measured lighting
environment for convincing car renderingsFrame-to-frame coherent sparkling simulation
Future Work– Extend car paint database– Multi-level methods for sparkles (avoid aliasing)
November 18, 2005 VMV, Erlangen, Germany 19
Project homepage:http://www.mpi-inf.mpg.de/~guenther/carpaint/
Data sets available
November 18, 2005 VMV, Erlangen, Germany 20
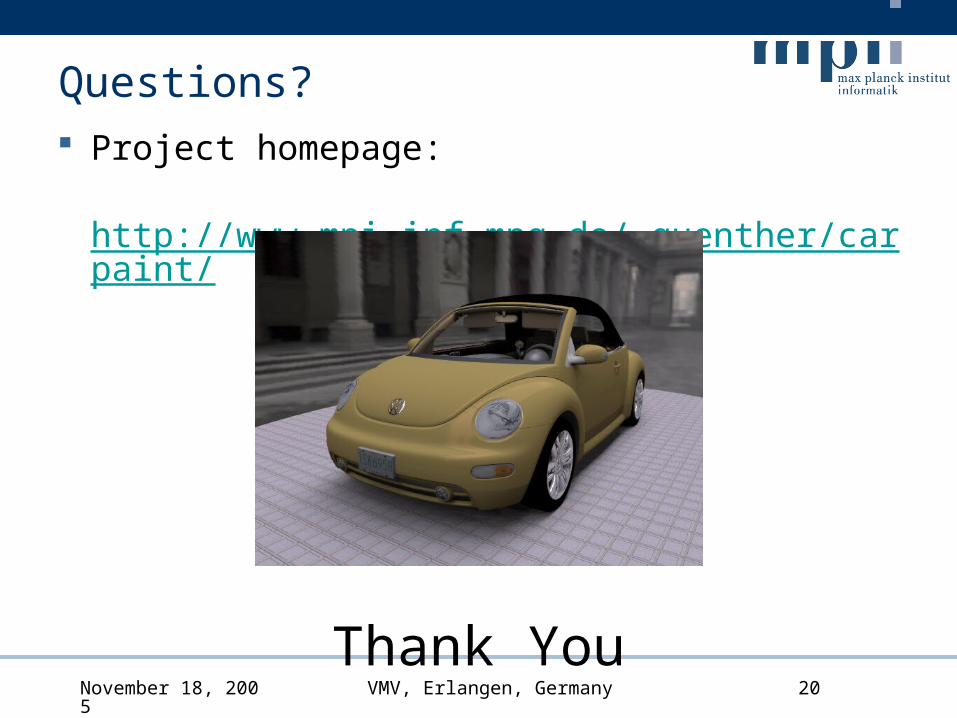
Project homepage:http://www.mpi-inf.mpg.de/~guenther/carpaint/
Thank You
Questions?
November 18, 2005 VMV, Erlangen, Germany 21
November 18, 2005 VMV, Erlangen, Germany 22
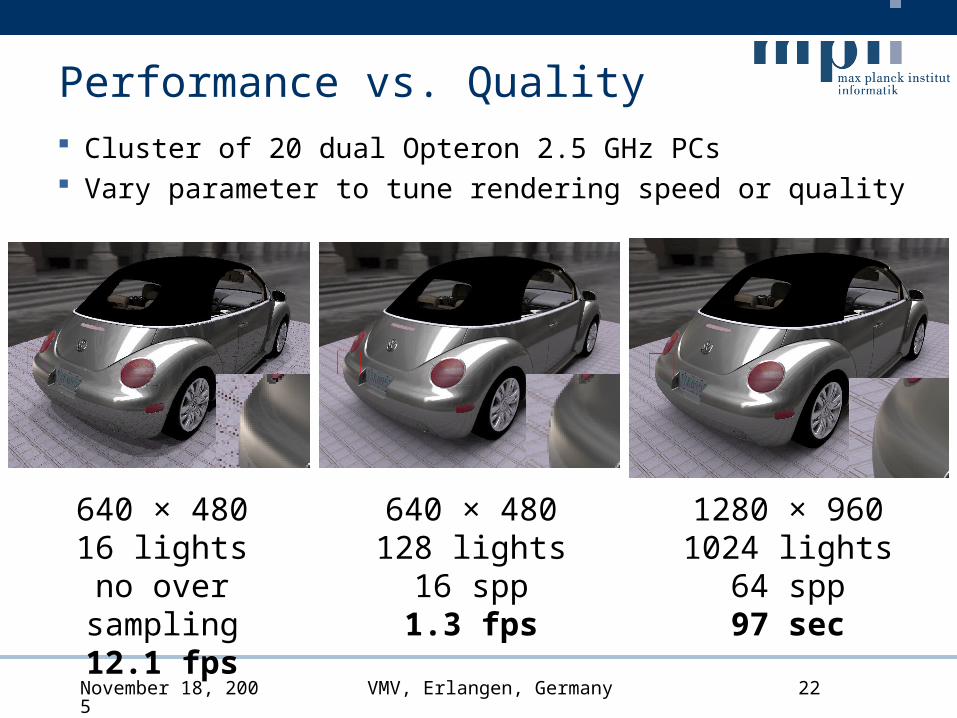
Performance vs. Quality
640 × 48016 lights
no over sampling12.1 fps
640 × 480128 lights
16 spp1.3 fps
1280 × 9601024 lights
64 spp97 sec
Cluster of 20 dual Opteron 2.5 GHz PCs Vary parameter to tune rendering speed or quality

November 18, 2005 VMV, Erlangen, Germany 23
Offline Rendering
November 18, 2005 VMV, Erlangen, Germany 24
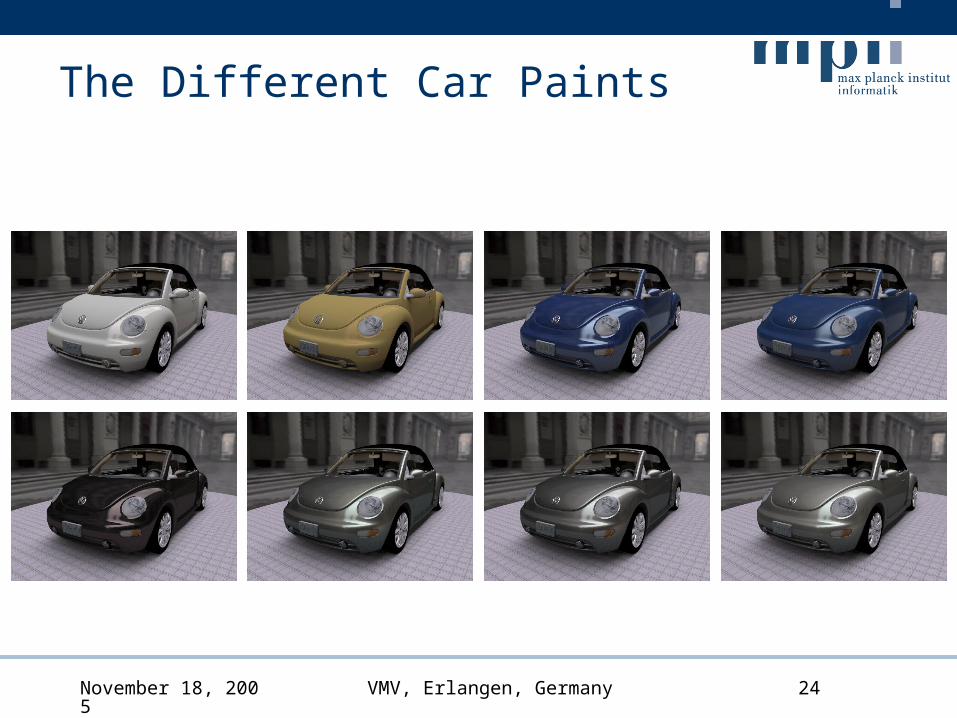
The Different Car Paints












![Realistic modeling and rendering of plant ecosystems · Realistic modeling and rendering of plant ecosystems ... CR categories: I.3.7 [Computer Graphics]: Three-Dimensional ... To](https://static.fdocuments.us/doc/165x107/5b3fdc017f8b9aff118c9e2f/realistic-modeling-and-rendering-of-plant-ecosystems-realistic-modeling-and.jpg)




