蒸気タービン自動制 装置 - Hitachi200 日立評論 VO+.61No.3(1979-3) 電力系続...
4
蒸気タービン自動制 U・D・C・[占81・532・5′27′135.4:る81.323-1 ム21.1る5-253:539.319:536.41る 装置 AutomaticControISYStem for Steam Turbine 火力発電所に中間負荷調整の役割が増加し,蒸気タービンをより安全に,より 速く起動できることが望まれている。日立製作所はこの要請に応ずるため,タービ ンロータの熟応力を管理するタービン自動制御装置を開発した。この装置は,タ ービンロータの熱応力を管理し最適なスケジュールで運転するもので,演算部には HIDIC O8を採用して小形化を図り,また,専用のソフトウェア言語と保守ツール により答易なプログラミングと容易な保守とを実現した。制御は昇速から連続負荷 運転までをシーケンシャルに行ない,その制御範囲により"HITASS”【100,同150 及び同200をシリーズ化している。 l】 緒 言 一最近,火力発電所は原子力発電所の増加とともに中間負荷 運用が要求され,プ煩繁な起動・停止を行なうようになってき ており,蒸気タービンの運転面でも運転員の負担を軽減して, より安全により速く起動することが要望されている。これら の要請にこたえるため,マイクロコンビチータによりタービ ンロータの熟応力を管理し,起動を制御する新シリーズのタ ービン自動制御装置"HITASS''(HitaclliTurbine Auto- matic Start・up System)を完成させた。 主な特長は次に述べるとおりである。 (1)タービンロータの熟応力を常時予測演算し,その演算結 果により最適な加速率,負荷変化率を決定することにより, 起動時間を短縮した安全な運転が可能である。 (2)主要演算部を日立マイクロコンピュータHIDIC O8に集 約し,装置を小形化した。 (3)FIF(Fillin the Form)方式とインタプリタ方式を併用 する専用のソフトウェア言語体系を用意し,ソフトウェアの 専門家でなくても容易に処理内容を理解することができる。 (4)タービン周りの補機の状態を常時モニタし,異常を発見 したときには項目ごとにオペレーターズコンソールパネル上 に表示する。また速度,負荷及び熟応力の現在値を数字表示 器に表示することにより,運転員が運転メ犬態を容易に把握す ることができる。 (5)付属の保守ツールにより,コンピュータの専門家でなく ても故障箇所をプリント板単位あるいは機能単位で知ること ができる。 凶 制御機能 2.1 制御範囲 加減弁起動方式の蒸気タービンに対応した"HITASS''の 制御範囲を区‖に示す。タービンの起動過程を7ステップに 分割している。 第1のステップ「起動準備+では補機の状態を監視し,タ ービンの起動に必要な条件がすべて満足されているかをチェ ックしている。 第2のステップ「ラブチェック+では,"HITASS''はロー ドリ ミットモータを開操作し,タービンを加速し,一定速度 を超えたらロードリ ミットモータにより蒸気加減弁を開き始 本田永信* 松本 弘** 射場大造* 久野勝邦*** 福島弘一郎**** 〃0れdα ∧bgαれ0占加 〟α′5山肌のJo 〟gγ05んg Jムα βαよヱ∂ 〟Jぶα托P 尺ム~ぶ比丘即氾J 凡ん伽ゴムfm ∬∂古cん上rる 起動準備 ラ ブ チェック 昇 速 励磁 同期初負荷 負荷上昇 通常運転 速 度 負 荷 定格 速度 俳人 員標埠 負荷 制 御 モ 】 ド プラント状態監視 ////// / / / / / / / / / / / / / / / / / / / / / / / / / / / / / 熱応力耶 速度制御 l/ 揃速 同期併入 負荷制御 //// //// // / / / / / / / ′ / / ′ / / / 御 ////γ■/// ///// /// //// //// ////// l シ り 1 ズ "H汀ASS''-100 "H一丁ASS''一150 ``H】TASS''-200 図l"H=‾ASS”の制御範囲 制御範囲により,`■HITASS”-100,同 150,同200のシリーズがある。 め位置まで閉めて,タービンに蒸気がi売人しないようにする。 この操作後,運転員がタービンにラビングが発生していなし- か聴音する。 第3のステップ「昇速+は, する過程である。昇速過程で, 適な値がi塞択される。 第4のステップ「励磁+では, 制御系に励磁拝旨令を与える。 タービンを定格速度まで昇速 昇速率は熟応力管理によr)最 "HITASS''は発電機の界磁 第5のステップ「同期・初負荷+では,ガバナモータを使 用してタービン速度を定格速度を中心として,-一定の振幅, 周期で変化させる。同時に自動同期装置により同期点を検出 し,主しゃ断器の投入を指令する。 第6のステップ「負荷上昇+は,オペレーターズコンソー ルパネルで設定した目標負荷への負荷上昇過程である。負荷 変化率は熟応力制御から最適な数値が選択される。発電機出 力が目標負荷に到達した後は「通常運転+となる。このステ * 日立製作所大みか工場 ** 日立製作所日立研究所 *** 日立製作所日立工場 **** 日立製作所電力事業本部 41
Transcript of 蒸気タービン自動制 装置 - Hitachi200 日立評論 VO+.61No.3(1979-3) 電力系続...

蒸気タービン自動制
U・D・C・[占81・532・5′27′135.4:る81.323-181.48〕‥る21.311.22-584-52ム21.1る5-253:539.319:536.41る
装置Automatic ControISYStem for Steam Turbine
火力発電所に中間負荷調整の役割が増加し,蒸気タービンをより安全に,より
速く起動できることが望まれている。日立製作所はこの要請に応ずるため,タービ
ンロータの熟応力を管理するタービン自動制御装置を開発した。この装置は,タ
ービンロータの熱応力を管理し最適なスケジュールで運転するもので,演算部には
HIDIC O8を採用して小形化を図り,また,専用のソフトウェア言語と保守ツール
により答易なプログラミングと容易な保守とを実現した。制御は昇速から連続負荷
運転までをシーケンシャルに行ない,その制御範囲により"HITASS”【100,同150
及び同200をシリーズ化している。
l】 緒 言
一最近,火力発電所は原子力発電所の増加とともに中間負荷
運用が要求され,プ煩繁な起動・停止を行なうようになってき
ており,蒸気タービンの運転面でも運転員の負担を軽減して,
より安全により速く起動することが要望されている。これら
の要請にこたえるため,マイクロコンビチータによりタービ
ンロータの熟応力を管理し,起動を制御する新シリーズのタ
ービン自動制御装置"HITASS''(HitaclliTurbineAuto-
matic Start・up System)を完成させた。
主な特長は次に述べるとおりである。
(1)タービンロータの熟応力を常時予測演算し,その演算結
果により最適な加速率,負荷変化率を決定することにより,
起動時間を短縮した安全な運転が可能である。
(2)主要演算部を日立マイクロコンピュータHIDIC O8に集
約し,装置を小形化した。
(3)FIF(Fillin the Form)方式とインタプリタ方式を併用
する専用のソフトウェア言語体系を用意し,ソフトウェアの
専門家でなくても容易に処理内容を理解することができる。
(4)タービン周りの補機の状態を常時モニタし,異常を発見
したときには項目ごとにオペレーターズコンソールパネル上
に表示する。また速度,負荷及び熟応力の現在値を数字表示
器に表示することにより,運転員が運転メ犬態を容易に把握す
ることができる。
(5)付属の保守ツールにより,コンピュータの専門家でなく
ても故障箇所をプリント板単位あるいは機能単位で知ること
ができる。
凶 制御機能
2.1 制御範囲
加減弁起動方式の蒸気タービンに対応した"HITASS''の
制御範囲を区‖に示す。タービンの起動過程を7ステップに
分割している。
第1のステップ「起動準備+では補機の状態を監視し,タ
ービンの起動に必要な条件がすべて満足されているかをチェ
ックしている。
第2のステップ「ラブチェック+では,"HITASS''はロー
ドリ ミットモータを開操作し,タービンを加速し,一定速度
を超えたらロードリ ミットモータにより蒸気加減弁を開き始
本田永信*
松本 弘**
射場大造*
久野勝邦***
福島弘一郎****
〃0れdα ∧bgαれ0占加
〟α′5山肌のJo 〟gγ05んg
Jムα βαよヱ∂
〟Jぶα托P 尺ム~ぶ比丘即氾J
凡ん伽ゴムfm ∬∂古cん上rる
起動準備ラ ブ
チェック昇 速 励磁 同期初負荷 負荷上昇 通常運転
速度
負荷
定格
速度
俳人
員標埠
負荷
制御モ
】
ド
プラント状態監視////// / / / / / / / / / / / / / / / / / / / / / / / / / / / / / /
熱応力耶
速度制御l/
揃速
同期併入
負荷制御//// //// // / / / / / / / ′ / / ′ / / /
御
////γ■/// ///// /// //// //// //////
l
シ
り1
ズ
"H汀ASS''-100 "H一丁ASS''一150``H】TASS''-200
図l"H=‾ASS”の制御範囲 制御範囲により,`■HITASS”-100,同
150,同200のシリーズがある。
め位置まで閉めて,タービンに蒸気がi売人しないようにする。
この操作後,運転員がタービンにラビングが発生していなし-
か聴音する。
第3のステップ「昇速+は,
する過程である。昇速過程で,
適な値がi塞択される。
第4のステップ「励磁+では,
制御系に励磁拝旨令を与える。
タービンを定格速度まで昇速
昇速率は熟応力管理によr)最
"HITASS''は発電機の界磁
第5のステップ「同期・初負荷+では,ガバナモータを使
用してタービン速度を定格速度を中心として,-一定の振幅,
周期で変化させる。同時に自動同期装置により同期点を検出
し,主しゃ断器の投入を指令する。
第6のステップ「負荷上昇+は,オペレーターズコンソー
ルパネルで設定した目標負荷への負荷上昇過程である。負荷
変化率は熟応力制御から最適な数値が選択される。発電機出
力が目標負荷に到達した後は「通常運転+となる。このステ
*
日立製作所大みか工場**
日立製作所日立研究所***
日立製作所日立工場****
日立製作所電力事業本部
41

200 日立評論 VO+.61No.3(1979-3)
電力系続
オペレーターズ
コンソー・ル
パネル
「 二「負荷増減
負 荷
変化率
初負荷
昇速率
目標速度
熟応力
負荷制御 ■-H汀ASS事'制御盤
目標負荷設定
負荷変化率選択
初負荷選択
プログラム信号発生
+
牙系統側PT
自動同期装置
発電機側PT
揃庄
主し
CT入力
PT入力
電力変換器
P旧演算
揃速制御
速度スイング信号発生
+
PID演算
昇速制御
昇遠率選択
目標速度選択 ′
+
低値選択
(実速度)
P旧演算
加速度演算
熟応力使用/除外
注:略字説明
PT=計器用変圧器
P旧=比例・積分・微分
CT=計器用変流器
T=切換
熱応力計算
サーモカッブル
速度検出器
____ +
電動機駆動装置
ロードリミッ
高 圧
タービン
圧力検出器
加減弁 主蒸気止め弁
中 庄
タービン
甘
低圧夕一ピン
再熟器
図2 ``HlTASS”の制御系統 負荷制御,揃速制御,昇速制御及び熟応力計算は,マイクロコンピュータにより演算処‡里される。
ップでは,オペレ【クーズコンソ【ルパネルで設定したH標
負荷を目標に,熱応力制御でi窒択した負荷変化率で発電機出
力を制御する。
以上の制御ステップの範囲により"HITASS”-100,同150、
同200のシリーズがある。
図2に"HITASS''の制御系統を示す。
2.2 熟応力制御
蒸気タービンの起動時,及び負荷変化時には,タービンの
肉厚部に発生する熱応プJによる二度労,すなわち寿命消費率を
許容値以下に利手卸する必要がある。従来は,スケジュール‾方
式と呼ばれる■方式により昇速率及び暖機時間を決定した。こ
の方式は,起動前のケーシングメタルi息度,主蒸気条件を基
に,ボイラの昇i温パターン,昇圧パタⅥンを予測し起動に必
要なパラメータを起動前に決定する方式である。しかしこの
方式では,昇i息パターン,昇庄パターンが予定値よりずれる
ことを見込んで大きなマージンをとっているため,起動時間
は長くなりがちであった。
今回開発した熟応力制御は,タービンの運転状態がボイ
ラの動特性に与える影響をオンラインで記憶し,これで熱応
力の予測演算を行なって,昇速率及び負荷変化率を逐次最
適化させる制御方式である。着目する熱応力発生箇所は,高
中庄タービンとも高温・高速の漏れ蒸気にさらされる第1段
42
ポイラ
GM
lガバナlモータ
発電機
後ラビリンスパ・ノキン部のロ【タ表面,及びボーア(中心孔)
部である。
熟応力制御のフローを図3に示す。まずケーシング内外壁
のメタル子息度の実測値からロータの温度分布を推定し,初期
値とする。二の上軌作は-一度実行されるだけであるが,これ以降
に説明する各機能は‥走周期で動作する。方じ力値計算では,
一呪力三のタ【ビン入U蒸気条作の実測値をもとに,現在のロータのi温度分布,熟ん打力を計算する。またこのときタⅦビンの
運転ご状態に対して,蒸気条件がどのように変化したかを記憶
しておき,ニの結果を予測制御に利用する。
予測制御は,「現在応力を求める周期+の整数倍で実施され
るので,予測実施周期であれば予測制御処理のi充れを切り替
える。変化率仮定部ではタ【ビンの起動二状態に応じて,加速
率あるいは負荷変化率のどちらかを仮定する。仮定する変化
率は大きいものから順に仮定していく。また最大の変化率は,
現在の運転状態により制限されている。蒸気条件予測部では,
仮定した変化率で運転した場合蒸気条件がどのように変化す
るかを,前述の記憶結果をもとに予測する。次にこの予測蒸
気条件の下でのロータの温度分布,熱応力の予測値を求め
る。二の予測応力値がある時間先まで許容値を超えていなけ
れば,仮定した変化率を指令変化率として昇速制御,あるい
は負荷制御ブロックに指示する。しかし,予測応力が許容値

蒸気タービン自動制御装置 201
1分周期
プラント入力値取込
初回演算?
NO
応力値計算
NO
応力は許容値内?
NO
保持指令
NO
予測実施周期?
YES
変化率仮定
蒸気条件予測
予測応力値計算
応力は許容値内?
YES YES
最適変化幸決定?
\
/
初期温度分布設定
応力値計算フロー
●‾「
仁第鳩後蒸気条件計算
熱伝達宰計算
ロータ内温度分布計算
ロータ表面応力
ロータボーア応力
+ __
計算
図3 熱応力制御フロー タービンロータを円筒とみなし,温度分布を
計算することにより,熟応力を求めている。
を超えていた場合には,再び変化率佃走部に戻って1ランク
′トさい変化率を似志して,前述の予測演算を実施する。)
現在応力値を■求める場合には蒸気条件に一呪在値を,予測応
力伯を求める場合には蒸乞て条件の予測値をそれぞれ入力して
演算させることにより求められるよう,応力伯計算フローは共
通のサブル【ナンとしている。ロータ応力を精ノ空良く求める
には,第1段後蒸気条件を止確に求めることが必要である。
昇速時とか,低負荷領域などの蒸気流量の′トさいときは計
1則器の測定誤差がi則定値に占める剖fナ(村村誤差)が大きくな
I),第1段後蒸気i温度,斥力を高相J空で測定することは困難
である。この問題を解f失するために,タービンの運転状態と
人l-+蒸気条件から一義的に第1段後蒸気条件を演算する方式
を採用している。
温度分布の更新計算では,ロータ内部の熟移動は半径方IFり
だけである‥i大元流とみなし,ロータを櫓数個の佃想円筒に
分割L,各円筒間の熟収支に着目し分布を求めている。ロー
タ応力は,?且度分布から計算できる。
田 ソフトウェア
ソフトウェアの全体構成を図4に示す。簡単にプログラミ
ングでき,容易に処理内容を理解できるよう同志部と可変部
とに大きく区分している。
制御処理内容の理解,変更には‾叶変部の各テーブルの記述
法だけを理解すれば十分である。可変部には,インタプリタ
方式とFIF方式と呼ばれる手法を併用Lている。インタプリ
夕方式は,約20種の演算要素を接続して,各種演算処理を実
行させる手法である。
アクションテーブル,クライテリアテーブル,オペレータ
ーズコンソ【ルテーブルは,あらかじめ決められたフオ〉「マ
、ソトに記号あるいは数字を記入することにより,コ】ディン
グ可能なFIF方式を採用している。
ブロック
チャート
解釈プログラム
(アセンブラ)
ー\ゝアクションテープル
クライテリア
テーブル
オペレーターズコンソール
テーブル
作業エリア
定数テーブル
固定
部
十可
変
部
㌔㌔去デ
ー
タ エ リ ア
図4 ソフトウェアの全体構成
式を併用Lている。
可変部はF==方式とインタプリタ方
田"HITASS”の構成と仕様
小HITASS''のシステム構成を図5に示す。
"HITASS†■は,中央制御盤に設置されるオペレ【ターズ
コンソール,制御盤及び保守ツⅥルから構成される。制御盤
の、H去は,幅650mm、奥行700mm,高さ2,300mm,2巾であ
り,従来のアナログ演算方式に比較して大幅なJ末面積の縮小
化を阿っている。
盤No.1にほ,日立マイクロコンビュ】タHIDIC O8,プロセ
ス人Hl力装置(PI/0)などを収納している。盤No.2には日動
同期装置,電動機駆動装置,補肋リレーなどを収納Lている。
オペレーターズコンソールパネルの上段はプラント状態の
監視表示部で,起動途中の必要なプラント条件のうちi満足し
ていない項Rを表示する。中央は目標ステ、ソプと制御ステッ
プを表示する起動シMケンス表示部である。下段には起動ス
ケンュー1ル表示などを設けている。
試運転及び左期ノ中二検での保守を谷易にするため,保=守ツー
表1 制御装置の仕様 "HITASS”-200の標準仕様を示す。
項 目 1 仕 様
演 算 部
形 式
メモリ
HIDIC O8
コアメモリ 32k言吾
語 長 16ビット十パリティ
入 出 力 部
形 式 H 7 6 0 0
入出力点数
(最大)
アナログ入力
アナログ出力
32点
8点
128点デ ィ ジ タ ル 入 力
メモリ付ディジタル入力 64点
デ ィ ジ タ ル 出 力 192点
パ ル ス 列 入 力 2点
形 式
機 能自動同期装置
パ ル ス 幅 出 力
S S-2
電 圧 平 衡
同 期 投 入
同 期 検 出
Z点
電動機駆動装置
盤寸
環境
方 式j パワートランジスタスイッチング方式
駆動対象ロードリミットモータ:DC直巻60W
ガバナモータ:DC直巷25W
)去 2面×幅650×高さ2′300×奥行700(mm)
条 件温 度:0、400c
〉五 度:川、90%
43

202 日立評論 VO+.61No.3(19了9-3)
霊蒜プ「
シミュレータ.
コンソー・・ル
タイプライタ
タービン
シミュレータ
輝蒜紺
一一‾‾‾‾
注:CPU=中央処理装置
Pレ′0=プロセス入出力装置
補助盤
甘
剛
川
(u
V円
淫自動同期装置
電動機駆動装置
補助リレー
電力変換器
Lヱ
蒸気タービン
プラント状態
監視表示
帽
励礎装置
中央制御盤
動シーケンス
表示
起一動スケジュール
表示
発電機
図5 "HlTASS”のシステム構成 "HITASS”は制御盤,オペレーターズコンソール及び保守ツールから構成される。
ルを準備している。この保守、ソールは,コンピュータ用コン
ソール入出力機器であるタイプライタ,紙テープ読取器,保
守時に必要な各種信号を授受する保守用コンソール及び簡易
化されたタービンシミュレーータから構成されている。コンビュ
【タのハードウェアを保守するには,T/M(Test& Main-
3,0.00 r-■■一-t一一■一一---
J
堅
檻承
速度
負荷
40 80 120 160 200 240 280 320
時間(min)
ボーア応力制限値
中庄ロータボーア応力
-R竣
0
(∋
ヽ
ヽヽ
中圧ロータ表面応力
表面応力制限値
0 40 80 †20 160 200 240 280 320
時間(mm)
注:---一従来方式 一新方式
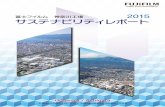
図6 起動シミュレー「ション結果 熱応力による新方式は,起動時間
を約25%短縮することが可能である。
44
tenance Program)を利用して,タイプライタとの会話形式
によI)容易に故障箇所を発見できる。またタービン自動制御
装置としての各種機能は,シミュレータを利用することによ
り容易にチェックすることができる。
▲、HITASS''の仕様を表1にホす。
B シミュレーション結果
図6は,熟応力制御による起動のシミュレーション結果を
示すものである。これは48時間停止後の暖機起動のものであ
るが,各種起動条件でも,応力制限値を精度良く有効に利用
できることが確認できた。その結果,起動時問は従来のスケ
ジュール方式より,平均して約25%の短縮が可能となった。
また,負荷追従性に関しては,目標負荷を25%から100%に
変化させて,追従性が約35%向上することが確認できた。
【司 結 吉
日立マイクロコンビュ【タを利用し,タービンロmタ熟応力
を管理する新シリuズの"HITASS''について述べた。この
装置は,起動時間を短縮した安全な運転を実現するもので,
火力発電所の中間負荷運用など新しいニーズに応ずるものと
考える。
終わりに,この装置を完成するに当たり御協力をいただい
た関係各位に対し深謝の意を表わす次第である。
参考文献
1)丸【j+,ほか3名:火力発電所のディジタル技′術,日立評論,
59,283(昭52-4)
2)福島,ほか2名:大容量火力発電用タービン全自動起動・停
止装置,日立評論,58,213(昭51-3)
![その場観察用応力負荷試験機sanko-web.co.jp/.../uploads/2018/10/ISL-CaseStudy_Ver2.pdf0.2 0.4 0.6 0.8 1 1.2 1.4 0 50 100 150 200 250 0 50 100 150 200 サンプルA 荷重[N]](https://static.fdocuments.us/doc/165x107/60af2c6605c75248fc5f77de/ecoeeeeesanko-webcojpuploads201810isl-casestudyver2pdf.jpg)



![{,12g lz{ f O O e 20111017 PDFu(.ppt [N c 0 0 0 ]pdf.irpocket.com/C3656/XN1V/yLge/CSWe.pdf大規模・大規模 ・・・高負荷高負荷高負荷システム システムシステムの](https://static.fdocuments.us/doc/165x107/5ecdad3c67c3df2536342aec/12g-lz-f-o-o-e-20111017-pdfuppt-n-c-0-0-0-pdf-efe-fffeeeeeeeeeff.jpg)