
Interim Guidelines for Evacuation Analyses for New and Existing Passenger Ships

1
EFFECTIVENESS OF PASSENGER EVACUATION PERFORMANCE FOR DESIGN, OPERATION & TRAINING USING FIRST-PRINCIPLES
SIMULATION TOOLS
D. Vassalos, L. Guarin, M. Bole, J. Majumder, G. C. Vassalos and H.S. Kim The Passenger Evacuation Group of the Ship Stability Research Centre (SSRC)
Department of Naval Architecture and Marine Engineering of the Universities of Glasgow and Strathclyde, Scotland, UK
Abstract Unlike earlier models, Evi has been developed from the outset for application to passenger ships in a sea environment, targeting the largest cruise liners and ROPAX. Utilising an advanced evacuation simulation tool, code-named Evi (Evacuability index), it is the main target of the Passenger Evacuation Group of the SSRC to develop a risk-based framework to support a systematic analysis of passenger evacuation risk at sea for given pertinent (fire/smoke, flooding, stranding) scenarios, environment, passenger distribution and demographics in a way that allows for interaction and iteration to address risk prevention/reduction through passive (design) and active (operation) means to ascertain a priory that ALL people on board can be evacuated. In this respect all evacuation issues pertaining to design/operation/regulation/training can be dealt with cost-effectively. This paper, provides an outline of recent developments and research with focus on this main direction; in particular real-time interactive simulation for onboard decision support (supported by the CRAFT project COMAND), passenger escape in flooding and fire scenarios accounting for crew functionality (supported by the EUREKA project SAFENVSHIP), passenger abandonment and recovery (supported by the EU STREP project SAFECRAFTS) .
1. INTRODUCTION
In the wake of the Estonia (Ro-Ro/passenger ship) disaster and with trends of largely increased capacity of passenger ships, with people onboard now ranging up to 6,000, the issue of effective passenger evacuation, it being the last line of defence, in an emergency has been brought to the centre of attention of the maritime industry worldwide. However, the process of evacuating a large passenger ship is a very complex one, not least because it involves the management of a large number of people on a complex moving platform, of which they normally have very little knowledge. These characteristics make ship evacuation quite different to evacuation from airplanes and buildings. To address the risk associated with passenger evacuation at sea, the term Evacuability (passenger evacuation performance capability) has been devised entailing a wide range of capabilities that encompass evacuation time, identification of potential bottlenecks, assessment of layout, life saving appliances, passenger familiarisation with a ship’s environment, crew training, effective evacuation procedures/strategies, intelligent decision support systems for crisis management and design/modification for ease of evacuation. From a technical point of view, the mass evacuation of thousands of people from an extremely complex environment with unknown inaccessibility problems exacerbated by (potentially co-existing) incidents such as progressive flooding, fire/smoke and the inherent uncertainty deriving from unpredictability of human behaviour, is a problem with severe modelling difficulties at system, procedural and behavioural levels. Evacuation has been a high priority in the International Maritime Organisation’s (IMO) agenda since 1999 when SOLAS imposed evacuation analysis to be carried out early in the design stage of new Ro-Ro passenger ships. Following this, the Fire Protection Sub-Committee, after three years

2
of work, issued in February 2002 a set of revised Interim Guidelines for new Ro-Ro passenger ships – new cruise ships and existing Ro-Ro passenger ships on a voluntary basis - to be carried out either by simplified analysis or computer-based advanced analysis. Such analysis would allow for assessment at the design stage of passive safety (in-built) of the ship evacuation system only, while operational safety, pertaining to any measures to enhance emergency preparedness and to better manage crisis in case of an emergency, is only dealt with by means of a safety factor. In this respect, the IMO evacuation scenarios address issues relating to layout and availability of primary evacuation routes as well as passenger distribution and response times but does not address any real emergencies and hence the need to prepare for these trough better planning, training and decision support, all related to the functionality of the crew onboard, which is as crucial to passenger mustering as a good layout of the escape routs. Breaking away from the traditional approach of the marine industry SSRC has recently developed and tested (including full scale trials) procedures for modelling crew functionality and assessing effectiveness of crew in support of RINA’s developments and launching of the first ever notation dedicated to operational aspects. This new concept makes evacuation analysis much more relevant offering real “means” for enhancing passenger evacuation performance as well as incentivizing passenger ship owners to improve emergency procedures. Following a brief explanation of evacuability and Evi 3.0 and the maritime context of the evacuation problem, a number of recent developments and research pertinent to passenger evacuation at sea are highlighted, including developments of Evi 4.0, the fourth generation evacuation simulation program developed by the SSRC Passenger Evacuation Group which focuses on higher automation, hence efficiency and flexibility in simulation, whilst improving accuracy and speed.
2. EVACUABILITY Before proceeding with the intricacies of evacuation, it is important to define the problem we try to solve and the degree to which this problem is formulated adequately for any evacuation analysis, conducted through numerical simulations, to be meaningful. In general, the ability to evacuate a ship environment within a given time and for given initial conditions (Evacuability) may be defined as follows (see Figure 1):
E = f {env, d, r(t), s(ni); t } Thus, Evacuability is a function of a set of initial conditions, env, d and r(t), and evacuation dynamics, s(ni), as explained next. Initial Conditions: the following initial conditions (env, d, r(t)) should be defined and remain fixed during the execution of the simulation: • env: ship environment model, pertaining to geometry, topology and domain semantics. For any
comparisons to be meaningful we need to assume a time invariant environment for evacuation simulations. An environment changing with time (e.g., blocking doors and exits online) could not easily allow for quantifiable assessment of these effects, as it would be very difficult to repeat any such action in precisely the same state of the simulated system. However, the ability to change the environment online could offer a strong basis for crew training and for decision support in crisis management. Moreover, fire/smoke spreading and progressive flooding, the principal hazards giving rise to the need to evacuate, result in a time varying environment. Hence for any comparisons concerning global and local effects to be meaningful, any environment changes ought to be affected in a deterministic way.
• d: initial conditions of the evacuation problem, pertaining to spatial and temporal demographics of the people onboard. People in the environment will actually be randomly distributed with the possibility of fixing some initial values, e.g., placing handicapped people on the embarkation decks and/or near an exit. As such, the initial distribution of people's demographics ought to be

3
sampled to identify its effect on evacuability. The latter could be avoided if the distribution is known with sufficient accuracy (confidence) that a specific spatial distribution in a given time is taken to define a specific scenario for any operational or design purposes.
• r(t): response time, which according to the IMO definition, is intended to reflect the total time spent in pre-evacuation movement activities beginning with the sound of the alarm. This includes issues such as cue perception provision and interpretation of instructions, individual reaction times, and performance of all other miscellaneous pre-evacuation activities. In addition, in-situ response time or any change in the state of a moving agent through intervention of e.g., crew ought to be considered. Response (awareness) time is certainly a random variable hence it has to be sampled for various distributions in order to evaluate its effect on evacuability.
E
Awareness Time (r)
Distribution (d) Walking speed (s)
Environment (env)
• Geometry • Topology • Semantics
• Mobility impairment index (Gender, age, mobility impairment)
• Evacuation plan • Crew Functionality
• Initial reaction time • In-situ reaction time
Spatial location of people
Figure 1: The concept of Evacuability (E)
Evacuation Dynamics: relates specifically to walking speed, which constitutes the main motion variable of evacuation dynamics as explained next: • s(ni):walking speed of individual flow units (agents/persons). The fact that each person onboard
is dealt with as an individual flow unit and that every procedural (evacuation plan) / functional (crew assistance) / behavioural (microscopic behaviour) parameter could be accounted for as a multiplicative factor ascertaining walking speed, provides for a unique and relatively easy way for simulating evacuation, essentially being able to deal with the effect of all of these parameters by simply following a given evacuation plan, accounting for crew assistance in some agreed quantifiable way and then sample walking speed for each individual flow unit from a corresponding distribution dependent on the environment and demographics. Using the relevant mobility impairment index (MII) the walking speed in each case can straightforwardly be calculated. From a development of realistic simulation of evacuation point of view, a great deal of effort may have to be expended to accurately quantify MII for all the pertinent microscopic behaviour as well as for specific crew assistance.
On the basis of the above thinking, it may be stated that evacuability is a well-defined problem that can be formulated and solved (simulated) for given initial conditions and passenger flow parameters.
3. THE MARITIME CONTEXT
Flooding and fire (and stranding) constitute the principal hazards that may lead to passenger evacuation. If these hazards develop into an uncontrollable situation, it must be ascertained a priory that ALL people on board can be evacuated safely. Evacuation analysis should therefore be aimed at developing a system (a minimum standard of evacuability) that guarantees this assertion to an acceptable level by utilising advanced consequence analysis tools for flooding, fire and evacuation

4
within a risk-based framework. Evacuability in this respect represents a risk measure of passenger evacuation at sea expressed as an index, for a given pertinent scenario, environment, passenger distribution and demographics and initial response time. Developing such a system will ensure focus on passenger safety in a systematic and all embracing way that safeguards against the consequences from given (design) flooding and/or fire scenarios that may lead to abandoning a ship or mustering to a safe refuge onboard, by providing an active link between the two; in particular the likelihood of these scenarios occurring and the ensuing consequences in a way that allows for systematic risk prevention/reduction through passive (design) and active (operation) means. In this respect, one can deal cost-effectively with design/operation/regulation/training issues. This constitutes the main target of the Passenger Evacuation Group of the SSRC utilising an advanced evacuation simulation tool, code-named Evi (Evacuability index, Evi), developed from the outset for application to the largest cruise liners and Ropax in a sea environment.
4. EVACUABILITY INDEX (Evi) - CURRENT DEVELOPMENTS
The mathematical modelling used in the development of the current version (Evi 3.0) of the evacuation simulation program has been explained in detailed in [2]. The main strength of the modelling derives from the ability to utilise high and low level planning interchangeably (macro- and microscopic modelling respectively, referred to as mesoscopic model) and to account for human behaviour realistically by adopting multi-agent modelling techniques. In terms of low-level planning, Evi treats space as a continuum – unlike other models that treat the ship area as a mosaic of square grids [4, 5] – and the process of an agent moving from one point of reference to another becomes a process of pursuing a static target. The choice of direction of movement in the presence of other agents and/or obstacles, is approached by combining grid-based techniques and social forces model (hybrid approach, see Figure 2) thus utilising both the effectiveness of grid-based techniques and the flexibility of social force methods. In order to simplify calculations, a range of discrete decisions is established around the agent with the objective of identifying the one that will allow the agent to travel as fast as possible (given its nominal speed) towards the local target. In addition, a continuous local (social/personal) space is established around each agent which other agent will aim to avoid. This space is used to prevent deadlock situations when the number of agents in an area becomes too high (density increases). The agents make a decision of the best use of personal space to resolve any conflicts that may arise. As a result, this approach allows the evacuation process to be modelled in sufficient detail and still run ”fast” for applications even with the largest cruise ships.
Grid based techniques Hybrid approach (Evi) Social force models
Figure 2: Space modelling techniques
One of the primary objectives of the development of Evi-3.0 was the definition of a coding model that could be easily adapted to future needs and directions of evacuation simulation within the industry. This combined with the introduction of an intuitive user interface, standardised data files based on Extensible Markup Language (XML) and a range of supporting tools allows also the program to be operated for any main stream software application. Evi's continuous space, discrete decision pedestrian motion model can flexibly adapt to the complexities of any ship's geometry and topology. In Evi 3.0, agents are considered as vehicular transport systems capable of carrying

5
information, interacting with other agents and autonomously travelling around the ship environment. By programming individual agents to perform certain tasks with elements called Objectives and Messages, it is possible to reproduce any evacuation procedure (or egress scenario, not necessarily associated with an emergency) by incorporating the actions specified in e.g. the vessels' muster list or disembarkation procedure. These elements make Evi an interactive and flexible simulation tool.
Interactive simulation (giving objectives and messages)
The majority of evacuation simulation tools work on the premise that large proportions of the population head for a low number of exits or safe zones. However, in ship evacuation this is not always the case. In Cruise ships, for example, personal lifejackets are stored in passenger cabins, meaning that each individual must travel to their cabin before heading to assembly stations. Furthermore, in large passenger vessels, crew are actively used to assist the egress process to ensure that passengers reach assembly stations in a rapid and orderly manner. Moreover, in specific emergency situations (scenarios) the role of the crew is the most important factor of the evacuation process. All the above imposes an additional set of requirements upon the simulation tool. For instance, in order to model all passengers returning to cabin, agents will require individual routes that will take them from anywhere in the ship to their cabin before they can join the main evacuation routes. Crew will require unique routes through the ship environment to allow them to perform specific emergency tasks. However, while modelling of crew may seem like a large task, the intension is only to address behaviour where crew affect passengers during evacuation. By focusing on the key elements that affect the evacuation process as defined by Evacuability (see section 2), it is only necessary to model interactions that involve change of reaction time, walking speed and route. Thus, in Evi, rather than considering an agent as one component, these requirements can be addressed by splitting it into two parts, a vehicle part, still termed “agent”, which follows a defined route exhibiting pedestrian dynamics behaviour, and a driver part, known as an “objective” which defines the route and any changes to reaction time and speed for the agent. This model allows for one type of agent and many different types of behaviour (objectives) which can be potentially changed on meeting certain situations, by other agents or interactively by the user.
Figure 3: Evi agents have replaceable objectives which allow them to perform a wide range of different activities
By using “Objectives”, a wide range of behaviour can be modelled in the simulation. However, without inter-agent communication, it is impossible for one agent to influence another beyond the
Evacuate to safe exit
Find Lifejacketin cabin
SearchCabins
Lost!
Wait
Evacuate
“Objective”
“Agent”
Standard (Single Objective)
Agent
The Evi(Replaceable Objective)
Agent
Available “Objectives”
Route, Speed, Timing information

6
interactions that occur at the pedestrian dynamics level. Through the introduction of a messaging system, a mechanism that allows agents (and the user) to dispatch information into the environment, agents can influence each other. The Evi messaging system allows two type of communication: • Environment wide messages: can be used to model the effect of the PA system or individual
crew radios and a dispatched message will be broadcast in all area. An example of the use of this system is for the recall of crew once all passengers have evacuated.
• Spoken messages: originate from a dispatching agent’s location and are only capable of being received over a certain distance. Doors modify message distance information allowing agents to hear messages from nearby spaces without hearing through walls and a diffusion effect is introduced. An example of the use of spoken messages in Evi can be found where agents come across blocked doors and communicate this information back through the crowd resulting in a change of route.
Figure 4: A searching crew agent passes an open door to a public area; passenger agents within the message range are roused and evacuate
Once agents within the simulation tool can be programmed at individual level and can interact with each other, crew behaviour can be modelled. Passenger agents can only send messages, and it is up to the receiving agents to act upon the information. However, crew agents differ from passengers in that they can explicitly change the behaviour of passenger agents. Based on the type of “Objective” that has been assigned, a crew agent will change the route, reaction time or speed of passenger agents in the locality. Using these key elements of the Evacuability concept, a crew agent can represent any of the main crew behaviour required for evacuation. In Evi 3.0, crew can be programmed to search cabins, public areas (reduce awareness time) as well as guide people in stairways, with additional “objectives” for re-routing congested passengers and embarking groups of assembled passengers to lifeboats, etc. More complex tasks can also be defined by scheduling of the Objectives. As evacuation procedures may differ between different ship types and operators, Objectives provide a fundamental technique for accurately defining appropriate responses to any emergency scenario. The system utilises a modern graphical user interface within a virtual reality environment.
Effectiveness of crew procedures
In cooperation with a Classification Society, the above-described capabilities were recently used to assess the effectiveness of crew procedures in a large passenger ship. In that study, the following crew procedures were simulated, largely based on the guidelines laid out in MSC/Circ. 1033 [1], but
7
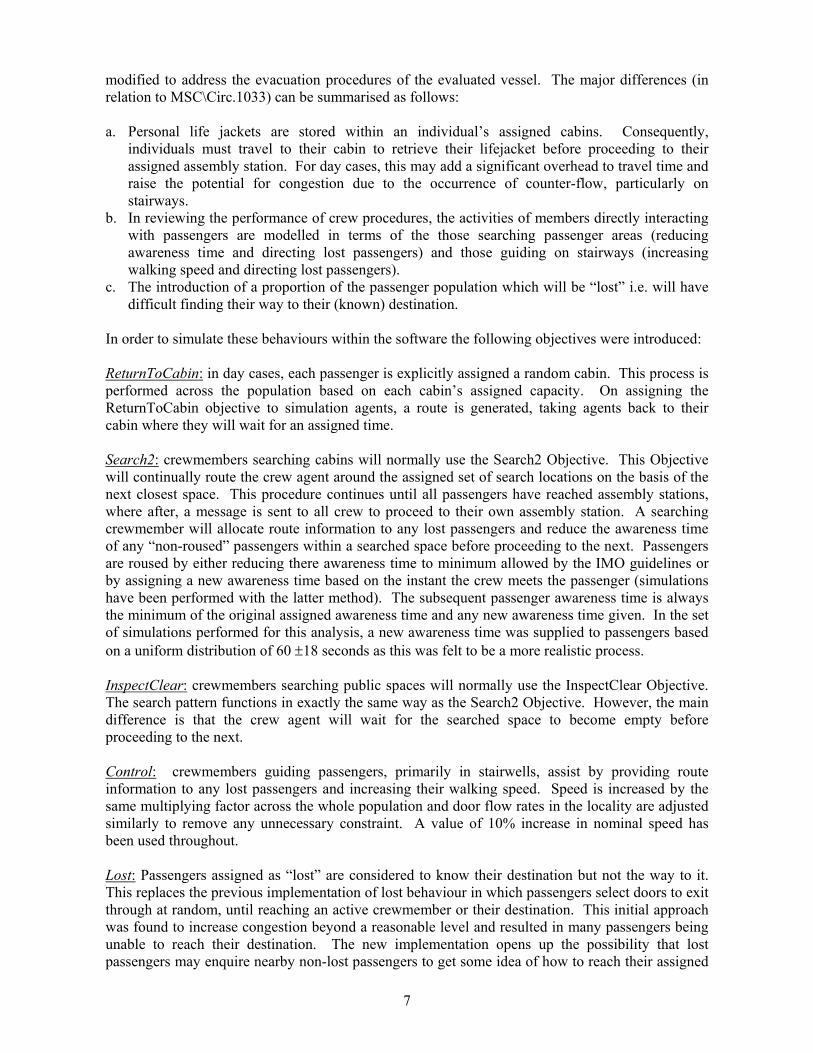
modified to address the evacuation procedures of the evaluated vessel. The major differences (in relation to MSC\Circ.1033) can be summarised as follows: a. Personal life jackets are stored within an individual’s assigned cabins. Consequently,
individuals must travel to their cabin to retrieve their lifejacket before proceeding to their assigned assembly station. For day cases, this may add a significant overhead to travel time and raise the potential for congestion due to the occurrence of counter-flow, particularly on stairways.
b. In reviewing the performance of crew procedures, the activities of members directly interacting with passengers are modelled in terms of the those searching passenger areas (reducing awareness time and directing lost passengers) and those guiding on stairways (increasing walking speed and directing lost passengers).
c. The introduction of a proportion of the passenger population which will be “lost” i.e. will have difficult finding their way to their (known) destination.
In order to simulate these behaviours within the software the following objectives were introduced: ReturnToCabin: in day cases, each passenger is explicitly assigned a random cabin. This process is performed across the population based on each cabin’s assigned capacity. On assigning the ReturnToCabin objective to simulation agents, a route is generated, taking agents back to their cabin where they will wait for an assigned time. Search2: crewmembers searching cabins will normally use the Search2 Objective. This Objective will continually route the crew agent around the assigned set of search locations on the basis of the next closest space. This procedure continues until all passengers have reached assembly stations, where after, a message is sent to all crew to proceed to their own assembly station. A searching crewmember will allocate route information to any lost passengers and reduce the awareness time of any “non-roused” passengers within a searched space before proceeding to the next. Passengers are roused by either reducing there awareness time to minimum allowed by the IMO guidelines or by assigning a new awareness time based on the instant the crew meets the passenger (simulations have been performed with the latter method). The subsequent passenger awareness time is always the minimum of the original assigned awareness time and any new awareness time given. In the set of simulations performed for this analysis, a new awareness time was supplied to passengers based on a uniform distribution of 60 ±18 seconds as this was felt to be a more realistic process. InspectClear: crewmembers searching public spaces will normally use the InspectClear Objective. The search pattern functions in exactly the same way as the Search2 Objective. However, the main difference is that the crew agent will wait for the searched space to become empty before proceeding to the next. Control: crewmembers guiding passengers, primarily in stairwells, assist by providing route information to any lost passengers and increasing their walking speed. Speed is increased by the same multiplying factor across the whole population and door flow rates in the locality are adjusted similarly to remove any unnecessary constraint. A value of 10% increase in nominal speed has been used throughout. Lost: Passengers assigned as “lost” are considered to know their destination but not the way to it. This replaces the previous implementation of lost behaviour in which passengers select doors to exit through at random, until reaching an active crewmember or their destination. This initial approach was found to increase congestion beyond a reasonable level and resulted in many passengers being unable to reach their destination. The new implementation opens up the possibility that lost passengers may enquire nearby non-lost passengers to get some idea of how to reach their assigned

8
destination. Particularly, if fellow non-lost passengers are heading for a place close to or the same as the lost passenger’s destination, then the lost agent will follow this guide while being taken closer to the assigned destination. If, in the process, the lost passenger gets close to the known destination (<15 m away, chosen by reasonable assessment) and on the same deck, the passenger is considered to have found a familiar location and will travel the remaining distance without need for further assistance. While in the process of following a fellow passenger, the lost passenger keeps looking for other passers-by who might be heading for a place closer still than the current guide. If one is found, the lost passenger selects the passer-by as the new guide. In the case where the Objective is to evacuate and a large number of passengers are non-lost and evacuating, such behaviour will almost always lead to those lost evacuating properly by following others. This revision is a result from experimental observations made during evacuation trials that took place last summer, where people in doubt were found to invariably follow nearby passengers. The method of specifying people as lost remains the same, i.e. as a percentage proportion of the population. The notion of ranking closeness of destinations, for example while attempting to switch guides is not based on the comparison of Euclidian distance between destinations as this would not represent the typical communication and judgment that would actually take place in such decisions. Instead we define a few discrete levels of closeness in order of priority, as follows:
• Same destination region (highest closeness rank) • Same fire-zone and same deck • Same deck but not same fire-zone • Same fire-zone but not same deck • None of the above but the same side - port or starboard (lowest closeness rank)
Using the muster list, the best approach in representing procedures is to separate the information down into crewmembers required for each location, in terms of deck/fire-zone/ship-side for searching and stairway/deck for guiding procedures. Using this approach, procedures can be quickly entered in the format required by the simulation software. Crew tasks can be assigned directly either to a crewmember selected at random within a particular space or at random from the crew population, this being handled by the present implementation of the “Procedure Builder”. With the procedure in place, demographics are assigned subsequently. Crew awareness times take account of whether individual agents have tasks to perform (dictated by the assignment of an Objective) or will follow the general evacuation procedure. Crewmembers without specific tasks to perform are simulated as if they were passengers although without making any contribution to passenger evacuation results. Once demographics have been assigned, the passenger procedures are addressed in terms of the requirement to return to cabins and the number that will be considered as lost. In those scenarios where crewmembers with tasks are considered passive, Objectives are assigned so that crew agents will travel to the location where the active procedure is carried out but will not influence any passengers. In some circumstances, this may mean that the crewmember will become an obstacle to the flow.
Case Study
Taking into account the above a number of day and night time scenarios were evaluated, including cases with different initial location of passengers (open decks, theatre, restaurants, etc). The simulations were carried out for a large cruise liner of about 300m in length, with about 2,700 passengers and 920 crewmembers of whom 164 perform emergency tasks (active crew). The results demonstrate that the evaluated vessel has in general very good evacuation capabilities in terms of the procedures considered within the current IMO evacuation guidelines [1]. The modern design, a simple general arrangement where longitudinal corridors directly connect to stairways leading out to the assembly stations allows for a reasonable quick assembly, considering the number of passengers involved. Significant congestion (signified by local passenger densities beyond 4

9
persons per squared metre for more than 10% of the assembly time) was rarely observed across the cases prior to the application of the full evacuation procedures. Notwithstanding the above, when the actual procedures on board were modelled (full evacuation procedure in which passengers are prompted to return to their cabins and crew influence the evacuation process) the main observation is the increased level of congestion due to counter flow. Indeed, in all day cases, local density in many of the stairways around deck 3 were above 4 persons per squared metre for about 15% of the assembly time duration. Accepting that the need for passengers to return to cabins to collect life jackets is a part of large passenger ship evacuation procedures, it is interesting to note that appropriate timing of procedures can significantly reduce levels of congestion. For the night case with crew procedures in place, it is interesting to note that crew searching passenger cabins were able to clear the accommodation decks before crew in cabins on lower decks became aware. Consequently, passengers were able to travel down this particular stairway before being restricted by crew travelling up to their assembly station. Although it is noted that awareness time is an key assumption of the present IMO guidelines, it would seem that there is a good argument for trying to separate the flow of those passengers returning to cabins and those travelling to assembly stations, by staggering the procedure timing or using different stairways for each flow. The size of staircases may be a contributing factor in the formation of congestion during counter flow situations. Smaller crew staircase used in evacuation may congest much more easily than larger main staircases (see Figure 5). Certainly, for large passenger vessels where the “return to cabins” is common, it is something that should be investigated in more detail. Moreover, as this analysis is one of the first instances where the operational evacuation procedures have been reviewed against existing regulations and guidelines, it should be noted that the rules governing the size of staircases only consider unidirectional flow during evacuation and it may be prudent to review the design of stairways used in evacuation to accommodate counter flow where these particular procedures are in place. It should be kept in mind that the simulations have been based on the routes defined in the evacuation plans and in the case of situations such as the one shown in Figure 5, passenger agents are not given the choice of following a route that would allow them to move into the next fire zone to use the less congested stairway. In this instant, it would appear that there is scope to use crew to re-route passengers away from crowded routes.
Figure 5: Counter flow on a smaller crew staircase while the larger staircase in the adjoining fire zone remains clear

10
Evi 4.0
The first design of the evacuation simulation model as implemented in versions 1.0 through 3.x has proved adequate for modelling evacuation in a wide class of scenarios. However, certain shortcomings have been identified through experience and feedback from a large number of research and commercial evacuation studies, which SSRC is seeking to address in a new design (Evi-4.0). In summary the new developments relate to the following: • Creation of the evacuation model from CAD drawings: the available CAD drawings of the
shipboard environment are line drawings, while the existing tool (Evi-3.0) requires the environment in the form of a set of convex regions. This entails that the entire shipboard environment should be drawn over again. This is labour intensive and should be automated.
• Environment modelling: in the new version 4.0 of Evi the whole ship is treated as a single manifold modelled as a 2D geometric complex, composed of triangular simplexes. The triangulation has similar navigational properties as the convex segmentation of the current version. This will allow modelling a cluttered environment (e.g., one with a lot of complex furniture and obstacles) without sacrificing faithfulness to the actual geometry. Important entities like spiral staircases and ladders can thus be accommodated. In this respect, one can plan navigational paths on the dual graph of the triangulation in the same way as one does for the door graph in the current version [2]. The advantage here is that it can be shown that the dual of the triangulation is a planar graph, for which the path planning can be done very efficiently. This model is illustrated in Figure 6.
• Reporting of results: Improved user interface
Figure 6: New environment representation (triangulation) – improved path planning A: a cluttered environment as in a CAD drawing; B: its generated 3D extrusion; C: the triangulation
graph and its dual (in the dual graph the vertices are red dots and edges are green lines). D: two sample navigational paths (agents’ paths) in the environment
In Evi-4.0, the available CAD drawings are processed to generate the environment description. This problem is quite complex and has been addressed by decomposition into sub-problems. As a

11
solution, what there is in place is a processing pipeline of modules, each of which addresses a sub-problem, as explained next: ⇒ A module for graphics recognition using geometric hashing and affine-invariant matching that
recognizes special patterns in the drawing; ⇒ A module that clusters segments in the line drawing to recognize the individual decks in a full
GA; ⇒ A module that converts image GAs into vector graphics form and another that reconstructs
arbitrary staircase geometry from its plan view. ⇒ A module that corrects drafting errors through cross snapping and removal of coincident lines
and another that converts pixel coordinates in image GAs into world coordinates. ⇒ A module that performs triangulation of the drawing and another that performs planar loop
detection in the drawing, and still another that performs clustering in the space of (affine-invariant) shape signatures of the planar loops.
Each of these modules is quite interesting in isolation and their full description would take much more space than this paper can permit.
Evi in the Maritime Context
In addition to the current work on enhancing the capabilities of the simulation tool itself to allow modelling crew emergency tasks, a number of research projects are underway at the SSRC dealing with all aspects of Evacuability in the maritime context. In this respect, one of the targets is to provide a platform for ship design in which safety is treated as another design objective – not a prescriptive design constraint. Such an approach permit investigating and quantifying the consequences of critical hazards for different scenarios in which Evacuation is part of the chain of events. In this case, appropriate risk control measures can be incorporated at the design/operation stage with consideration of other performance and cost related criteria so that a desired safety level is achieved cost-effectively. Among those developments, the integration of first-principles simulation tools used to quantify the time line development and consequences of flooding and fire/smoke scenarios is being addressed as part of collaborative National and EU funded research projects. Notably, the SAFENVSHIPS project is a large collaborative project, involving 11 participants from six European countries. The aim of SAFENVSHIP is to develop, evaluate and validate methodologies and tools for design of the next generation cruise and ferry ships related to safety (fire protection, structural reliability and evacuation) and environment (clean sea and air). Within SAFENVSHIP, the Evi team is dealing with all modelling aspects pertaining to the whole process of evacuation (mustering, embarkation and abandonment) in different environments and scenarios and the validation of such through analysis of the quantitative information gathered from full scale trials and purposely undertaken experiments. In this respect, full scale trials onboard a large passenger ship were undertaken during the summer of 2003. The trials were planned to investigate and quantify individual (agent’s) travel time and walking speed, flow rate through doors, and congestion (behaviour in queues and stairs), which is necessary to support the validation and verification of the simulation model Evi as well as some of the assumptions implicit in the current IMO guidelines for advanced evacuation analysis. In total, five tests were conducted within one of the ship’s fire zone with 500 crewmembers participating as evacuees. In a wider sense, the outcome of the tests demonstrates that the impact of the crew in ship evacuation is paramount and its modelling is essential to achieve a meaningful representation of the process, as crew can potentially affect all the factors of Evacuability. Part of the above activities is also the zone model approach for modelling fire/smoke propagation in ship layouts and structures being developed at the SSRC [6] with a view to integrate fire/smoke and evacuation in a way that is consistent with new SOLAS regulations on alternative design arrangements (Regulation 17 of SOLAS Chapter II). The same integration has already been
12
realised with existing seakeeping simulation tools capable of addressing large scale progressive flooding (for collision and/or grounding scenarios – CRAFT Project COMAND). In a much wider perspective, existing simulation tools for evacuation mainly deal with the assembly process; embarkation is not explicitly modelled, due mainly to a “gap” in operational feedback as well as in theoretical and experimental knowledge. The EU-funded project SAFECRAFTS (www.safecrafts.org), in which the SSRC is a partner (Work Package Leader), seeks to fill these gaps and will not only target to improve current rescue systems but will also attempt to develop new LSA concepts. In the process, SAFECRAFTS activities would be focused on investigating and quantifying the performance of LSA systems (and the whole process of reaching the rescue vessel in a safe and reliable manner) by using a first-principles approach (in terms of hydromechanics, mechanics, human behaviour). This will be used in the context of a quantitative risk assessment and emergency management for the design of rescue systems for passengers and crew, addressing both hardware and procedures/management. In this respect physical model tests and full-scale tests will play a decisive role. The outcome of this project is expected to allow the enhancement of evacuation simulation tools to explicitly address the embarkation/launching as well as rescue processes.
5. CONCLUDING REMARKS
Five years since the introduction of the first Interim Guidelines for a Simplified Evacuation Analysis, developments around the world concerning evacuation in the maritime context have increased in a staggering pace and research activities through multi-million projects are paving the way towards holistic approaches that address this problem as part of design/operation/training, systematically and scientifically. The Passenger Evacuation Group at SSRC are involved in all the facets of these developments and are playing a leading role in the modelling and application of passenger evacuation simulation in the marine sector, through a large number of industrial and research projects.
6. REFERENCES
1. IMO (2002), “Interim Guidelines for Evacuation Analysis of New and Existing Passengers Ships”, MSC/Circ.1033, June 2002.
2. Vassalos D., Kim H., Christiansen G., Majumder J. (2001), “A Mesoscopic Model for Passenger Evacuation in a Virtual Ship-Sea Environment and Performance-Based Evaluation”, Pedestrian and Evacuation Dynamics – April 4-6, 2001 – Duisburg.
3. NFPA (1995), “SFPA Fire Protection Engineering Handbook”, 2nd Edition, US National Fire Protection Association, 1995
4. www.fseg.gre.ac.uk/exodus/ 5. www.germanlloyd.org/aeneas/aeneas.html 6. Shigunov V. (2004), “Fire Development and Smoke Propagation in Ship Compartments”,
Schiffstechnik Bd.51 – 2004/Ship Technology Research Vol. 51 - 2004.


















