e15 - motiongenesis.commotiongenesis.com/MGWebSite/MGTextbooks/MGTextbookAdvancedD… · Title:...
14
Homework 1. Chapters 2. Basis independent vectors and their properties Show work – except for ♣ fill-in-blanks (print .pdf from www.MotionGenesis.com ⇒ Textbooks ⇒ Resources ). 1.1 ♣ Solving problems – what engineers do . Understanding dynamics results from doing problems. Many problems herein guide you to help you synthesize processes (imitation). Please do these problems by yourself or with colleagues/instructors and use the textbook and other resources. Confucius 500 B.C. “By three methods we may learn wisdom: “I hear and I forget. First, by reflection, which is noblest; I see and I remember. Second, by imitation, which is easiest; I and I understand.” Third by experience, which is the bitterest.” 1.2 ♣ What is a vector (defined by Gibbs circa 1897)? (Section 2.2) Two properties (attributes) of a vector are and (fill in the blanks). 1.3 ♣ What is a zero vector? (Section 2.3) A zero vector 0 has a magnitude of 0/1/2/∞ (circle an answer). A zero vector 0 has no direction. True/False (circle true or false). A zero vector 0 is parallel to any vector v. True/False . A zero vector 0 is perpendicular to any vector v. True/False . 1.4 ♣ Unit vectors. (Section 2.4) A unit vector has a magnitude of 0/1/2/∞ . All unit vectors are equal. True/False . 1.5 ♣ Vector magnitude and direction (orientation and sense). (Section 2.2) The figure to the right shows a vector v. Draw the following vectors. a Same magnitude and direction as v ( a = v). b Same magnitude and orientation as v, but different sense (direction). c Same magnitude as v, but different orientation (direction). d Same direction as v, but smaller magnitude. e Different magnitude and different direction (orientation) as v. v 1.6 ♣ Magnitude of a vector. (Section 2.2) Knowing x is a real positive number and i is a horizontally-right unit vector, the magnitude of the vector − x i is (circle one ): positive negative non-negative non-positive. 1.7 ♣ Negating a vector. (Section 2.8) Complete the figure to the right by drawing the vector − b. Negating the vector b results in a vector with different (circle all that apply): magnitude direction orientation sense Historical note: Negative numbers (e.g., - 3) were not widely accepted until 1800 A.D. b Copyright c 1992-2020 Paul Mitiguy. All rights reserved. 299 Homework 1: Vectors – basis independent
Transcript of e15 - motiongenesis.commotiongenesis.com/MGWebSite/MGTextbooks/MGTextbookAdvancedD… · Title:...

Homework 1. Chapters 2.Basis independent vectors and their properties
Show work – except for ♣♣♣♣♣♣♣♣♣♣♣♣♣ fill-in-blanks (print .pdf from www.MotionGenesis.com ⇒ Textbooks ⇒ Resources).
1.1 ♣♣♣♣♣♣♣♣♣♣♣♣♣ Solving problems – what engineers do.Understanding dynamics results from doing problems. Many problems herein guideyou to help you synthesize processes (imitation). Please do these problems by yourselfor with colleagues/instructors and use the textbook and other resources.
Confucius 500 B.C. “By three methods we may learn wisdom:“I hear and I forget. First, by reflection, which is noblest;I see and I remember. Second, by imitation, which is easiest;I and I understand.” Third by experience, which is the bitterest.”
1.2 ♣♣♣♣♣♣♣♣♣♣♣♣♣ What is a vector (defined by Gibbs circa 1897)? (Section 2.2)
Two properties (attributes) of a vector are and (fill in the blanks).
1.3 ♣♣♣♣♣♣♣♣♣♣♣♣♣ What is a zero vector? (Section 2.3)
A zero vector �0 has a magnitude of 0/1/2/∞ (circle an answer).A zero vector �0 has no direction. True/False (circle true or false).A zero vector �0 is parallel to any vector �v. True/False .A zero vector �0 is perpendicular to any vector �v. True/False .
1.4 ♣♣♣♣♣♣♣♣♣♣♣♣♣ Unit vectors. (Section 2.4)
A unit vector has a magnitude of 0/1/2/∞ .All unit vectors are equal. True/False .
1.5 ♣♣♣♣♣♣♣♣♣♣♣♣♣ Vector magnitude and direction (orientation and sense). (Section 2.2)
The figure to the right shows a vector �v. Draw the following vectors.�a Same magnitude and direction as �v (�a = �v).�b Same magnitude and orientation as �v, but different sense (direction).�c Same magnitude as �v, but different orientation (direction).�d Same direction as �v, but smaller magnitude.�e Different magnitude and different direction (orientation) as �v.
v
1.6 ♣♣♣♣♣♣♣♣♣♣♣♣♣ Magnitude of a vector. (Section 2.2)
Knowing x is a real positive number and i is a horizontally-right unit vector, the magnitude of thevector −x i is (circle one): positive negative non-negative non-positive.
1.7 ♣♣♣♣♣♣♣♣♣♣♣♣♣ Negating a vector. (Section 2.8)
Complete the figure to the right by drawing the vector −�b.Negating the vector �b results in a vector with different (circle all that apply):
magnitude direction orientation senseHistorical note: Negative numbers (e.g., −3) were not widely accepted until 1800 A.D.
b
Copyright c© 1992-2020 Paul Mitiguy. All rights reserved. 299 Homework 1: Vectors – basis independent

1.8 ♣♣♣♣♣♣♣♣♣♣♣♣♣ Optional: Multiplying a vector by a scalar. (Section 2.7)
Complete the figure to the right by drawing the vectors 2 u and −2 u.The following statements involve a unit vector u and a real scalar s (s �= 0).If a statement is true, provide a numerical value for s that supports your answer
s u can have a different magnitude than u. True/False s =s u can have a different direction than u. True/False s =s u can have a different sense than u. True/False s =s u can have a different orientation than u. True/False s =
u
1.9 ♣♣♣♣♣♣♣♣♣♣♣♣♣ Optional: Graphical vector addition/subtraction - draw. (Sections 2.6,2.8)
b
a
Draw �a +�bDraw �a −�b
1.10 ♣♣♣♣♣♣♣♣♣♣♣♣♣ Visual representation of a vector dot-product. (Section 2.9)
Write the definition of the dot-product of a vector �a with a vector �b.Include a sketch with each symbol in your definition clearly labeled.Result: �a ············· �b � Sketch should include �a, �b,
���a��, ���b��, . . .
1.11 ♣♣♣♣♣♣♣♣♣♣♣♣♣ Visual representation of a vector cross-product. (Section 2.10)
Write the definition of the cross-product of a vector �a with a vector �b.Include a sketch with each symbol in your definition clearly labeled.Result: �a × �b � (θ) u Sketch should include �a, �b,
���a��, ���b��, . . .
where u is
and θ is
1.12 ♣♣♣♣♣♣♣♣♣♣♣♣♣ Properties of vector dot-products and cross-products. (Sections 2.9.1 and 2.10)
When �a is parallel to �b, �a ············· �b = 0 True/False �a ×�b = �0 True/False
When �a is perpendicular to �b, �a ············· �b = 0 True/False �a ×�b = �0 True/False
For arbitrary vectors �a and �b, �a ············· �b = �b ············· �a True/False �a ×�b = �b×�a True/False
Copyright c© 1992-2020 Paul Mitiguy. All rights reserved. 300 Homework 1: Vectors – basis independent

1.13 ♣♣♣♣♣♣♣♣♣♣♣♣♣ Calculating vector dot-products and cross-products via definitions. (Sections 2.9 and 2.10)
Draw a unit vector k outward-normal to the plane of the paper (perpendicular to vectors �a and �b).Knowing
∣∣�a∣∣ = 2 and∣∣�b∣∣ = 4, calculate the expressions below (2+ significant digits) using only the
definitions of dot-product and cross-product.
a
b
�a ············· �b =
�a × �b =
a
b
�a ············· �b =
�a × �b =
a
b
60o
�a ············· �b =
�a × �b =
a
b
60o
�a ············· �b =
�a × �b =
1.14 ♣♣♣♣♣♣♣♣♣♣♣♣♣ Vector exponentiation: �v2 and �v3. Complete the 3-step proofs. (Section 2.9)
Step 1: Complete the definition of �v2 in terms of∣∣�v∣∣.
Step 2: Use the definition of the dot-product to show how �v ·············�v can be expressed in terms of∣∣�v∣∣.
Step 3: Combine these two definitions to provide an alternate way to calculate �v2 with a vector dot-product.Result:
�v2 �∣∣�v∣∣ �v ············· �v =
(2.2)�v2 = ·············
Complete the 3-step proof that relates �v3 to �v ············· �v raised to a real number.Result:
�v3 �∣∣�v∣∣ =
(2.4)
(√ )= (�v ············· �v)
1.15 ♣♣♣♣♣♣♣♣♣♣♣♣♣∣∣c ax
∣∣ Calculate vector magnitude with dot products. (Section 2.9 and Hw 1.14)
Show how the vector dot-product can be used to show that the magnitude of the vector c ax (c is apositive or negative number and ax is a unit vector) can be written solely in terms of c (without ax).Result: ∣∣c ax
∣∣ = +
√············· = +
√c2 ∗ ············· = +
√c2 = abs(c)
1.16 ††††††††††††† Magnitude of the vector �v. Show work. (Section 2.9)
Knowing the angle between a unit vector i and unit vector j is 120◦,calculate a numerical value for the magnitude of �v = 3 i + 4 j.Result: ∣∣�v∣∣ =
√13 Note: The answer is not
√25 = 5.
i
j
1.17 ♣♣♣♣♣♣♣♣♣♣♣♣♣ Property of scalar triple product. (Section 2.11).For arbitrary non-zero vectors �a, �b, �c: �a ············· (�b ×�c) = (�a × �b) ·············�c Never/Sometimes/AlwaysA property of the scalar triple product is �a ············· �b ×�a = 0. True/False .
1.18 Property of vector triple cross-product. (Sections 2.10 and 2.11)
Complete the following equation: �a × (�b ×�c
)= �b
( ) − �c( )
For arbitrary vectors �a, �b, �c: �a × (�b×�c) = (�a×�b)× �c + �b × (�a×�c) True/False (show work).
1.19 ♣♣♣♣♣♣♣♣♣♣♣♣♣ Optional: Proof of magnitude of vector cross product property. (Sections 2.9 and 2.10)
Letting λλλλλλλλλλλλλ be a unit vector and �v be any vector, prove1∣∣�v × λλλλλλλλλλλλλ
∣∣2 = �v ············· �v − (�v ············· λλλλλλλλλλλλλ)2.
1One way to prove this is to write (�v×�λ�λ�λ�λ�λ�λ�λ�λ�λ�λ�λ�λ�λ)2
= (�v×�λ�λ�λ�λ�λ�λ�λ�λ�λ�λ�λ�λ�λ) ············· (�v×�λ�λ�λ�λ�λ�λ�λ�λ�λ�λ�λ�λ�λ) =(2.13)
�v ············· [�λ�λ�λ�λ�λ�λ�λ�λ�λ�λ�λ�λ�λ × (�v×�λ�λ�λ�λ�λ�λ�λ�λ�λ�λ�λ�λ�λ)] and then use the vector triple cross-
product property �a × (�b×�c) = �b(�a ·············�c) −�c(�a ·············�b) from Section 2.10. Alternatively, it is helpful to write �v = �v⊥ �λ�λ�λ�λ�λ�λ�λ�λ�λ�λ�λ�λ�λ⊥ + �v|| �λ�λ�λ�λ�λ�λ�λ�λ�λ�λ�λ�λ�λwhere �v⊥ �λ�λ�λ�λ�λ�λ�λ�λ�λ�λ�λ�λ�λ⊥ is the component of �v that is perpendicular to �λ�λ�λ�λ�λ�λ�λ�λ�λ�λ�λ�λ�λ and �v|| �λ�λ�λ�λ�λ�λ�λ�λ�λ�λ�λ�λ�λ is the component of �v that is parallel to �λ�λ�λ�λ�λ�λ�λ�λ�λ�λ�λ�λ�λ.
Copyright c© 1992-2020 Paul Mitiguy. All rights reserved. 301 Homework 1: Vectors – basis independent

1.20 ♣♣♣♣♣♣♣♣♣♣♣♣♣ Angle between vectors. (Section 2.9)
For the figure shown right, determine the numerical valuefor the angle between vector �a and vector �b.Result: ∠∠∠∠∠∠∠∠∠∠∠∠∠
(�a, �b
)= ◦
b
a 30o
30o
1.21 Visual estimation of vector dot/cross-products. Show work. (Sections 2.9 and 2.10)
Estimate (e.g., using your pinky) the magnitudes of the vectors �p and �q shown below.Estimate the angle between �p and �q, �p ············· �q, and the magnitude of �p × �q. Show work.Result: (Provide numerical results with 1 or more significant digits).∣∣�p∣∣ ≈ cm
∣∣�q∣∣ ≈ cm ∠∠∠∠∠∠∠∠∠∠∠∠∠(�p, �q
) ≈ ◦
�p ············· �q ≈ cm2∣∣�p × �q
∣∣ ≈ cm2
qpNote: 1 inch = 2.54 cm
1.22 ♣♣♣♣♣♣♣♣♣♣♣♣♣ Form the unit vector u having the same direction as c ax. (Section 2.4)
Result: u = ax Note: �ax is a unit vector and c is a non-zero real number, e.g., 3 or −3.
1.23 ♣♣♣♣♣♣♣♣♣♣♣♣♣ Coefficient of u in cross products – definitions and trig functions. (Section 2.10)
The cross product of vectors �a and �b can be written in terms of a real scalar s as �a�b = s uwhere u is a unit vector perpendicular to both �a and �b in a direction defined by the right-handrule. The coefficient s of the unit vector u is inherently non-negative. True/False .
1.24 ♣♣♣♣♣♣♣♣♣♣♣♣♣ Insights into orthogonal vectors via drawing. (Section 2.10)
Draw unit vectors a, b, c such that:• b is perpendicular to a• c is perpendicular to b but c is neither parallel or perpendicular to a.
1.25 Calculating distance between a point and a line via cross-products. (Section 2.10.1)
Draw a horizontally-right unit vector ax and vertically-upward unit vector ay.Draw a point P and a line L through P that is parallel to u = 3
5 ax + 45 ay.
Draw a point Q whose position vector from point P is �r = 5 ax (also draw �r).Draw the distance d between Q and L. Calculate d with both formulas in eqn (2.9).Result: d =
(2.9)= 4 d =
(2.9)= 4
1.26 ♣♣♣♣♣♣♣♣♣♣♣♣♣ Ranges of angles from dot-product and cross-product calculations. (Sections 2.9 and 2.10)
Given: Unit vectors a and b and the numerical values of c � a ············· b and s �∣∣a × b
∣∣.Complete the following table with an appropriate range of numerical values.Quantity Range of valuesc ≤ c ≤s ≤ s ≤Angle θc between a and b that can be uniquely determined solely from c
◦ ≤ θc ≤ ◦
Angle θs between a and b that can be uniquely determined solely from s◦ ≤ θs ≤ ◦
Angle θ between a and b◦ ≤ θ ≤ ◦
Note: The range of θs is smaller than the range for θ. Hence, s and θs are insufficient to correctly calculate θ.
Copyright c© 1992-2020 Paul Mitiguy. All rights reserved. 302 Homework 1: Vectors – basis independent

1.27 ♣♣♣♣♣♣♣♣♣♣♣♣♣ Vector operations and units. (Chapter 2)
Circle the vector operations below (scalar multiplication, addition, dot-product, etc.) that are defined fora position vector �a (with units of m) and a velocity vector �b (with units of m
s ).−�a 5�a �a / 5 �a + �b �a ············· �b �a ×�b
1.28 ♣♣♣♣♣♣♣♣♣♣♣♣♣ Using vector identities to simplify expressions (refer to Homework 1.12).One reason to treat vectors as basis-independent quantities is to simplify vector expressions with-out resolving the vectors into orthogonal “�x, �y, �z” or “�i,�j, �k” components. Simplify the followingvector expressions using mathematical properties of dot-products and cross-products.
Express results in terms ofdot-products ············· and cross-products × of the arbitraryvectors �u, �v, �w.�u, �v, �w are not
necessarily orthogo-
nal or co-planar.
w
vu
Vector expression Simplified vector expression
(3�u − 2�v) × (�u + �v) �u×�v
(3�u − 2�v) ············· (�u + �v) �u2 − �v2 + �u ············· �v
(�u − �v) ············· (�u + �v) −(3�u − 2�v) × (�u + �v) ············· (2�u − 7�v)(�u + �v) × (�v + 2 �w) ············· (�w + 2�u) �u×�v ············· �w
1.29 ♣♣♣♣♣♣♣♣♣♣♣♣♣ Vector concepts: Solving a vector equation. (Section 2.9.5)
Shown right is a vector equation and a process that solves for θ(�ax is a unit vector and vx, θ, R are scalars).This is a valid process to solve for θ. True/False .
vx ax = θ R ax
θ =vx ax
R ax=
vx
R
Explain:
1.30 Changing a vector equation to scalar equations. (Section 2.9.5)
Draw three mutually orthogonal unit vectors p, q, r.Use a vector operation (e.g., +, ∗, ············· , × ) to change the vector equation
(2x−4
)p
into one scalar equation and subsequently solve the scalar equation for x.Result: (
2x − 4)p = �0 ??⇒ (
2x − 4)
= 0 ⇒ x = 2
Show every vector operation (e.g., +, ∗, ············· , × ) that changes the following vector equationinto three scalar equations and subsequently solve the scalar equations for x, y, z.
(2x − 4) p + (3 y − 9) q + (4 z − 16) r = �0Result: (2x − 4) = 0 (3 y − 9) = 0 ( ) = 0
x = 2 y = 3 z = 4
††††††††††††† The figure to the right shows three non-orthogonal, non-coplanar vectors �i,�j, �k.Show every vector operation that changes the following vector equation into threeuncoupled scalar equations and subsequently solve those scalar equations for x, y, z.
(2x − 4)�i + (3 y − 9)�j + (4 z − 16) �k = �0Result: (2x − 4) = 0 (3 y − 9) = 0 ( ) = 0
x = 2 y = 3 z = 4Hint: think × ············· ,not matrix algebra. i
j
k
Copyright c© 1992-2020 Paul Mitiguy. All rights reserved. 303 Homework 1: Vectors – basis independent

1.31 ♣♣♣♣♣♣♣♣♣♣♣♣♣ Number of independent scalar equations from 1 vector equation. (Section 2.9.5)
The vector equation shown right is useful for static analyses of a system S. �FS
= �0
In the table to the right, box all integers that could be equal tothe number of independent scalar equations produced by theprevious vector equation. Hint: Hw 1.30. Related Hw 17.7.
System type Integer(s)
1D (line) 0 1 2 3 4+
2D (planar) 0 1 2 3 4+
3D (spatial) 0 1 2 3 4+Note: 1D/linear means �F
Scan be expressed in terms of one vector �i.
2D/planar means �FS
can be expressed in terms of two non-parallel unit vectors �i and �j.3D/spatial means �F
Scan be expressed in terms of three non-coplanar unit vectors �i, �j, �k.
1.32 ♣♣♣♣♣♣♣♣♣♣♣♣♣ Vector concepts: Solving a vector equation (just circle true or false and fill-in the blank).Consider the following vector equation written in terms of the scalars x, y, zand three unique non-orthogonal coplanar unit vectors a1, a2, a3.
(2x − 4) a1 + (3 y − 9) a2 + (4 z − 16) a3 = �0
The unique solution to this vector equation is x = 2, y = 3, z = 4. True/False .
a3 a2
a1
Explain: a2 can be expressed in terms of a1 and a3 (i.e., �a2 is a linear combination of �a1 and �a3).Hence the vector equation produces linearly independent scalar equations.
1.33 ♣♣♣♣♣♣♣♣♣♣♣♣♣ Concept: A vector revolution for geometry. (Chapter 2)
The relatively new invention of vectors (Gibbs ≈ 1900 AD) has revolutionized Euclidean geometry(Euclid ≈ 300 BC). For each geometrical quantity below, circle the vector operation(s) (either thedot-product, cross-product, or both) that is most useful for their calculation.
Length: ············· × Angle: ············· ×Area: ············· × Volume: ············· ×
1.34 ††††††††††††† Microphone cable lengths (non-orthogonal walls) “It’s just geometry”. Show work.
A microphone Q is attached to three pegs A, B, C by three cables. Knowing the peg locations,microphone location, and the angle θ between the vertical walls, express LA, LB , LC solely in termsof numbers and θ. Next, complete the table by calculating LB when θ = 120◦.Hint: To do this efficiently, use one set of non-orthogonal unit vectors (do not introduce an orthogonal set of unit vectors).
Hint: Use the distributive property of the vector dot-product as shown in Section 2.9.1 and Homework 2.4.
Note: Synthesis problems are difficult. Think, talk, draw, sleep, walk, get help, . . . (if necessary, read Section 3.3).
A C
Q
No
1520
5
7
8
Note: The floor is horizontal, the walls are vertical.
B
8
θ
Result:
Distance between A and B 20 mDistance between B and C 15 mDistance between No and B 8 mDistance along back wall (see picture) 7 mQ’s height above No 5 mDistance along side wall (see picture) 8 mLA: Length of cable joining A and Q 16.9 mLB: Length of cable joining B and Q 8.1 mLC : Length of cable joining C and Q 14.2 m
LA =√
202 − 168 cos(θ) LB = LC =√
137 − cos(θ)
Copyright c© 1992-2020 Paul Mitiguy. All rights reserved. 304 Homework 1: Vectors – basis independent

Homework 2. Chapters 1, 2, 3, 4.Vector addition, dot products, and cross products
Show work – except for ♣♣♣♣♣♣♣♣♣♣♣♣♣ fill-in-blanks (print .pdf from www.MotionGenesis.com ⇒ Textbooks ⇒ Resources).
2.1 ♣♣♣♣♣♣♣♣♣♣♣♣♣ Right-handed, orthogonal, unitary, vector basis. (Section 4.1)
Draw a right-handed orthogonal (mutually perpendicular) vec-tor basis consisting of the unit vectors ax, ay, az.
2.2 ♣♣♣♣♣♣♣♣♣♣♣♣♣ Adding and subtracting vectors with bases. (Sections 2.6 and 2.8)
Shown right are right-handed orthogonalunit vectors i, j, k and vectors �u, �v, �w.Form the vector sums and differences below.Result:
�u = 2 i + 3 j + 4 k
�v = x i + y j + z k
�w = 5 i − 6 j + 7 k k i
j
�u + �v = (2 + x) i + j + k �u − �v = (2 − x) i + j + k
2.3 ♣♣♣♣♣♣♣♣♣♣♣♣♣ Column matrices and vectors (Hint: What is a vector – Hw 1.2). (Section 2.12)
As defined by Gibbs, vectors have magnitude and direction.True/False : The vector ax + 2 ay + 3 az is equal to the column matrix
1
23
.
Note: �ax, �ay, �az are the orthogonal unit vectors shown right.ax
ay
az
True/False : Adding the following vectors and column matrices produce equivalent results.Note: �ax, �ay, �az and �bx, �by, �bz are the sets of orthogonal unit vectors shown below.
ax
ay
az
bx
bz
by ax + 2 ay + 3 az + 4 bx + 5 by + 6 bz =
1
23
+
4
56
=
5
79
2.4 ♣♣♣♣♣♣♣♣♣♣♣♣♣ Calculating vector dot products with bases. (Sections 2.9 and 2.9.3)
Given: Right-handed orthogonalunit vectors nx, ny, nz and:
�u = 2 nx + 3 ny + 4 nz
�v = x nx + y ny + z nz
�w = 5 nx − 6 ny + 7 nz
ny
nxnz
(a) Use the distributive law for dot products to write �u ············· �v in terms of nx ············· nx, nx ············· ny, etc.Result: �u ············· �v = 2x nx ············· nx + 2 y nx ············· ny + 2 z nx ············· nz
+ 3x ny ············· nx + 3 y ············· + ·············+ ············· + ············· + ·············
(b) Use the definition of the dot product in equation (2.2) to calculate nx ············· nx, nx ············· ny, etc.Result: nx ············· nx = nx ············· ny = nx ············· nz =
ny ············· nx = ny ············· ny = ny ············· nz = 0nz ············· nx = nz ············· ny = nz ············· nz = 1
(c) In view of your previous two results, calculate �u ············· �v.Result: �u ············· �v =
(d)Shown right (from Section 2.9.3) is a special formula for the dotproduct of arbitrary vectors �a and �b when nx, ny, nz are or-thogonal unit vectors. Use this special formula to calculate:
�a = ax nx + ay ny + az nz
�b = bx nx + by ny + bz nz
�a ············· �b = ax bx + ay by + az bz
�u ············· �v = 2x + 3 y + z �u ············· �w = �v ············· �w =
Copyright c© 1992-2020 Paul Mitiguy. All rights reserved. 305 Homework 2: Vectors with basis

2.5 ♣♣♣♣♣♣♣♣♣♣♣♣♣ Perpendicular vectors. (Note: �i, �j, �k are orthogonal unit vectors). (Section 2.9)
When �v = x i + 2 j + 3 k is perpendicular to �w = 4 i + 5 j + 6 k, x = .
2.6 Dot product for calculating angles. (Sections 2.9 and 3.3)
The figure to the right shows a rectangular parallelepiped(block) of sides 2, 3, and 4 with points A, B, C located atcorners. nx, ny, nz are right-handed orthogonal unit vectorswith nx directed from B to C and ny from B to A.
nynx
nz
(a) Express �rC/A(C’s position from A) in terms of nx, ny, nz and find a numerical value for |�rC/A| 2.
Next, use equation (2.4) to calculate the magnitude of �rC/A(the distance between A to C).
Result: �rC/A = nx − ny |�rC/A|2 = �rC/A ············· �rC/A = |�rC/A| =
(b) Using equation (2.1), calculate the unit vector u directed from A to C in terms of nx, ny, nz.Next, find the unit vector v directed from A to D in terms of nx, ny, nz.Result:
u =3 nx − 2 ny√
13v =
(c) Calculate ∠BAC, the angle between line AB and line AC.Next, calculate ∠CAD, the angle between line AC and line AD.Result: ∠BAC = ◦ ∠CAD = 47.97◦
2.7 ♣♣♣♣♣♣♣♣♣♣♣♣♣ Vector components: Sine and cosine. (Section 1.4)
Trigonometry plays a central role in rotation matrices.Replace each ????????????? in the figure to the right with sin(θ) or cos(θ).Express unit vectors a and b in terms of sin(θ), cos(θ), i, j.Result:
SohCahToaa = i + j
b = i + cos(θ) j θ
1θ 1
ab
?
?
?
?i
j
Copyright c© 1992-2020 Paul Mitiguy. All rights reserved. 306 Homework 2: Vectors with basis

2.8 ♣♣♣♣♣♣♣♣♣♣♣♣♣ Vector components for a crane-boom. (Section 1.4)
Shown right is a crane whose cab A supports aboom B that swings a wrecking ball Co.
i, j, k are right-handed orthogonal unit vectorswith i horizontally-right, j vertically-upward,and k perpendicular to the plane containingpoints No, AB, BC , Co.
Draw each position vector listed below andthen use your knowledge of sine/cosine to re-solve these vectors into i and j components.
L B
x A
θCN
B
LC
BC
θB
ABNo
Co
Draw position vectors
AB’s position from No �rAB/No = i + j
BC ’s position from AB �rBC /AB = i + j
Co’s position from BC �rCo/BC = i + j
BC ’s position from No �rBC/No = i + j
No’s position from Co �rNo/Co = i + [−LB sin(θB) + LC cos(θC)] j
2.9 Dot products and distance calculations. Show work. (Section 2.9)
Shown right is a crane whose cab A sup-ports a boom B that swings a wreckingball Co. To prevent the wrecking ball fromhitting a car at point No, the distance be-tween No and the tip of the boom (point
BC) must be controlled.
To start this problem, express BC ’s posi-tion from No in terms of x, LB , and theunit vectors nx and bx.
Result: �rBC/No = nx + bx
L B
x A
θCN
B
LC
BC
θB
ABNo
Co
(a) Without resolving �rBC/No into nx and ny components (done in the next step), use equation (2.4)and the distributive property to calculate the distance between No and BC in terms of x, LB ,θB. Then calculate its numerical value when x = 20 m, LB = 10 m, θB = 30◦.Result: (If necessary, complete the footnote hint below).1
Distance between No and BC : |�rBC/No | =√
+ + = 29.1 m
(b) Two colleagues are confused by your use of mixed-bases vectors (i.e., x nx + LB bx), and askyou to verify B’s position from No can be expressed in the uniform-basis as shown below.Use this uniform-basis expression to verify your previous result for |�rBC/No |.Note: This inefficient uniform-basis approach requires the simplifying trigonometric identity sin2(θB) + cos2(θB) = 1.
Result: �rBC/No = [x + LB cos(θB)] nx + LB sin(θB) ny |�rBC/No | simplifies to previous result.
(c) Optional: Calculate the distance between No and Co in terms of x, LB, LC , θB, and θC.Result: |�rCo/No | =
√x2 + L2
B + L2C + 2 xLB cos(θB) + 2 xLC sin(θC) − 2 LB LC sin(θB−θC)
1Hint: Use the distributive property to express �rBC/No ············· �rBC/No in terms of x, LB , and �nx ············· �bx.
Next, use the dot-product definition in equation (2.2) to calculate �nx ············· �bx = , and then rewrite
�rBC /No ············· �rBC/No = 2 +2
+ 2 x LB ( ············· ) = 2 +2
+ 2 x LB cos( ).
Note: The distributive property for vector dot-multiplication is��a + �b
� ············· ��c + �d�
= �a ·············�c + �a ·············�d + �b ·············�c + �b ·············�d.
Copyright c© 1992-2020 Paul Mitiguy. All rights reserved. 307 Homework 2: Vectors with basis

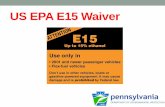
2.10 Vector components, free-body diagram (FBD), and motion graphs for a rocket-sled.The following figure shows a rocket-sled moving along smooth (frictionless) inclined rails.Description Symbol TypeMass of rocket-sled and rider m Constant
Earth’s gravitational acceleration g Constant
Angle between horizontal and inclined-rails θ Constant
�i measure of thrust force on sled FT Specified
�j measure of normal force on sled FN Variable�i measure of rocket-sled position x Variable θ
Draw a unit vector i upward-right and parallel to the rails.Draw a unit vector j outward-normal to the rails (perpendicular to �i ) and in the plane of the paper.
Free-body diagramDraw a particle representing the rocket-sled.Draw the thrust, normal, and gravity forces on the rocket-sled.Express the net force on the rocket-sled in terms of i and j.Result: �FNet = �FThrust + �FNormal + �Fgravity
= i + j
ij
�F = m �a The rocket-sled’s acceleration can be calculated as �a = d2xdt2
i = x i .Substitute the right-hand sides of �FNet and �a into �FNet = m�a and solve for x and FN .Result: i + j = m x i
i : x =−
mj : FN =
Solve for acceleration : Knowing m = 100 kg, g = 10 ms2 , θ = 30◦, FT = 700 N, graph x .
Solve for velocity and position : Knowing the rocket-sled starts at x = 8 m, and is initially movingdownward-left along the rail at 4 m
s , solve and sketch x(t) and x(t) for 0 ≤ t ≤ 8.
Result: x(t) = 2 m/s2
0 1 2 3 4 5 6 7 8
x.. =
a x
(m
/s2 )
time (seconds)
x(t) = m/s
0 1 2 3 4 5 6 7 8
x. =
v x
(m
/s)
time (seconds)
x(t) = meters
0
5
10
15
20
25
30
35
40
0 1 2 3 4 5 6 7 8
x(t)
(m
eter
s)
time (seconds)
Include friction between the rails and rocket-sled, modeled via a coefficient of kinetic friction µk.Express x and FN in terms of some/all of µk and symbols in the table. Knowing µk ≈ 0.115x(0) = 8 m, and the rocket-sled initially moves upward-right at 4 m
s , find x(t) and x(t).Result:
x(t) =m
≈ 1 ms2
FN =x(t) ≈x(t) ≈
Calculate the minimum thrust (redraw FBDs) to: Resulta. Keep the rocket-sled moving uphill at constant speed FT ≈ Nb. Keep the rocket-sled moving downhill at constant speed FT ≈ N
For part b, assume the rocket is initially moving downward-left at 4 m/s.Solution at www.MotionGenesis.com ⇒ Get Started ⇒ Rocket sled.
m g
FT
i
FN
j
Copyright c© 1992-2020 Paul Mitiguy. All rights reserved. 308 Homework 2: Vectors with basis

2.11 ♣♣♣♣♣♣♣♣♣♣♣♣♣ Construct a unit vector u in the direction of each vector given below. (Section 2.9.2)
Vector Unit vector u3 nx nx
−3 nx
3 nx − 4 ny
3 nx − 4 ny + 12 nz
c nx orc is a real non-zero number
ny
nxnzNote: �nx, �ny, �nz are orthogonal unit vectors.
Note: Ensure your last answer agrees with your first two answers, e.g., if c = 3 or c = −3.
2.12 ♣♣♣♣♣♣♣♣♣♣♣♣♣ Calculating vector cross products with bases. (Section 2.10)
Given: Right-handed orthogonalunit vectors nx, ny, nz and:
�u = 2 nx + 3 ny + 4 nz
�v = x nx + y ny + z nz
�w = 5 nx − 6 ny + 7 nz
ny
nxnz
(a) Use the distributive law for cross products to write �u ×�v in terms of nx × nx, nx × ny, etc.Result: �u × �v = 2x nx × nx + 2 y nx × ny + 2 z nx × nz
+ + ++ + +
(b) Use the definition of the cross product to calculate nx × nx, nx × ny, etc.Result: nx × nx = �0 nx × ny = nz nx × nz = −ny
ny × nx = ny × ny = ny × nz =
nz × nx = nz × ny = nz × nz =
(c) In view of your previous two results, calculate �u ×�v.Result: �u × �v = nx + ny + nz
2.13 Cross products and determinants. (Section 2.10.2)
Given arbitrary vectors �a and �b expressed in terms of right-handed orthogonal unit vectors nx, ny, nz as shown right,show that calculating �a �b with the distributive property ofthe cross product happens to be equal to the determinant of thematrix shown to the right.
�a = ax nx + ay ny + az nz
�b = bx nx + by ny + bz nz
�a �b = det
nx ny nz
ax ay az
bx by bz
Next use this determinant method to calculate the following cross products (refer to Hw 2.12).Result: �u�v =
(3 z − 4 y
)nx +
(4x − 2 z
)ny +
( )nz
Optional: �u× �w = 45 nx + 6 ny − 27 nz
Optional: �v × �w =( )
nx +( )
ny − ( )nz
Copyright c© 1992-2020 Paul Mitiguy. All rights reserved. 309 Homework 2: Vectors with basis

2.14 ♣♣♣♣♣♣♣♣♣♣♣♣♣ Optional: Cross product as skew-symmetric matrix multiplication. (Section 2.10.3)
Referring to the previous problem, show that the nx, ny, nz coeffi-cients of �a�b happen to be equal to the elements that result fromthe following skew symmetric matrix multiplication.
0 −az ay
az 0 −ax
−ay ax 0
bx
by
bz
After counting the number of computer operations required to multiple the 3×3 matrix by the 3×1matrix (including multiplication by 0), and comparing the number of operations required to calculatethe elements of the simplified answer, it is clear that using a matrix multiplication to calculate across product is inefficient True/False .
2.15 ♣♣♣♣♣♣♣♣♣♣♣♣♣ Scalar triple product with bases. (Section 2.11)
The figure shows right-handed orthogonal unit vectors nx, ny, nz.Given�u = 2 nx + 3 ny + 4 nz
�v = x nx + y ny + z nz
�w = 5 nx − 6 ny + 7 nz
Calculate�u × �v ············· �u =�u × �v ············· �w = z − x − 6 y
�u ············· �v × �w = z − 45 x − y
ny
nxnz
Note: Although the order of operations in �u ×�v ············· �u is unambiguous, parentheses may clarify your work.�u×�v ············· �w = �u ············· �v× �w and it is OK to switch ············· and × in scalar triple products. True/False .
2.16 ♣♣♣♣♣♣♣♣♣♣♣♣♣ Optional: Scalar triple products and determinants. (Section 2.11)
Given arbitrary vectors �a, �b, �c expressed in terms of right-handed orthogonal unit vectors nx, ny, nz as shown right,prove that calculating �a ············· (�b× �c) happens to be equal to thedeterminant of the matrix shown to the right.
�a = ax nx + ay ny + az nz
�b = bx nx + by ny + bz nz
�c = cx nx + cy ny + cz nz
�a ············· �b×�c =
∣∣∣∣∣∣ax ay az
bx by bz
cx cy cz
∣∣∣∣∣∣2.17 †††††††††††††Optional: Form �v from �v ············· u and �v × u . (Table in Section 2.10)
Given: �v ············· ax = 15 �v × ax = 5 az
Form: Vector �v in terms of right-handed orthogonal unit vectors ax, ay, az.
Result: �v = ax − ay
ax
ay
az
Given: Unit vector u = 0.6 ax + 0.8 ay �v ············· u = 15 �v × u = 4 ax − 3 ay + 5 az.Form: Vector �v in terms of right-handed orthogonal unit vectors ax, ay, az.
Result: �v = ax + ay − az Note: �v × �u is not arbitrary. It is perpendicular to �u.
ax
ay
az
Given: �s = 0.6 a1 + 0.8 a2 �v ·············�s = 15 �v ×�s ≈ 2.07846 a1 − 3 a2 + 5 a3.Form: Vector �v in terms of right-handed non-orthogonal unit vectors a1, a2, a3.Result: �v ≈ 12.476 a1 + 3.643 a2 − a3 (Hint: �s is not a unit vector). a1
a2
a3
60
Copyright c© 1992-2020 Paul Mitiguy. All rights reserved. 310 Homework 2: Vectors with basis

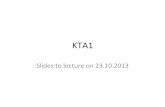
2.18 ♣♣♣♣♣♣♣♣♣♣♣♣♣ Cross products: Commercial algorithm for area calculations (surveying). (Section 2.10.1)
One reason triangles are important is that complex planar objects such as the polygon B below canbe decomposed into triangles. Planar measurements are important in various professions, includingfarming acreage, building costs, and mass and area properties of 2D objects.
B0
Bcm
B1
B2
B3
B4B5
B6
B7
B8
B9
B
bx
by
bz
�rB1/B0 = 2.0 bx + 2.0 by
�rB2/B0 = 0.5 bx + 2.5 by
�rB3/B0 = 3.0 bx + 4.0 by
�rB4/B0 = 0.2 bx + 6.0 by
�rB5/B0 = −0.5 bx + 7.0 by
�rB6/B0 = −1.0 bx + 5.0 by
�rB7/B0 = −2.0 bx + 7.0 by
�rB8/B0 = −4.0 bx + 5.0 by
�rB9/B0 = −2.0 bx + 0.0 by
A commercial algorithm for calculating the area of the polygon B shown above is to:
• Label a vertex B0 and number the remaining vertices sequentially in a counter-clockwise fashion.• Form �rBi/B0 , Bi’s position from B0 (i = 1, 2, . . .)
• Calculate �A2 and �A4, the “vector-areas” of the triangles defined by vertices B0 B2 B3, andB0 B4 B5, respectively. Formulas for the vector-areas of each triangle are given below along withthe vector sum of these areas �A and the polygon’s area (the magnitude of �A).
Result: (Just fill in the blanks. You only need to calculate �A2, �A4, and A)
�A1 = 12 ∗ �rB1/B0 × �rB2/B0 = 2 bz
�A2 = 12 ∗ �rB2/B0 × �rB3/B0 =
�A3 = . . . = 8.6 bz
�A4 = . . . =�A5 = . . . = 2.25 bz
�A6 = . . . = 1.5 bz
�A7 = . . . = 9 bz
�A8 = 12 ∗ �rB8/B0 × �rB9/B0 = 5 bz
A =∑8
i =1�Ai =
Area =∣∣�A∣∣ = 27.8
Accounting for overlapped areas is done with positive
and negative signs on vectors.
Note: Compute cross products with the distributive property (�a+�b)× (�c+�d) = �a×�c + �a×�d + �b×�c + �b×�d
and the cross-product-definition with the right-hand rule (not determinants or special formulas in a book).
Also, use the fact that �bx, �by, �bz are orthogonal unit vectors.
Planar objects, courtesy of Working Model and Design-Simulation Technologies
Copyright c© 1992-2020 Paul Mitiguy. All rights reserved. 311 Homework 2: Vectors with basis

2.19 Locating a microphone (2D). Show work. (Section 1.4)
A microphone Q is attached to two pegs B and C by two cables. Knowing the peg locations, cablelengths, and points B, C, Q, No all lie in the same plane, determine the distance between Q and No.Do the problem with Euclidean geometry (law of cosines 2x), then try vectors (see Hw 1.34).
Q
15
y
89
x
B
nx
ny
C
8
No
?
Quantity ValueDistance between B to C 15 mDistance between No to B 8 mLength of cable joining B and Q 9 mLength of cable joining C and Q 8 mDistance between No and Q 9.01 mIf Q is above ceiling, distance ≈ 12 m
Note: Although there are two mathematical answers to this problem,one is above the ceiling and requires the cables to be in compression.
2.20 †††††††††††††Locating a microphone (3D).A microphone Q is attached to three pegs A, B, and C by three cables. Knowing the peg locationsand cable lengths, determine the distance between Q and point No. Show work.2
A C
Q
No
1520
15 1311
Note: The floor is horizontal, the walls are vertical.
B
8
Quantity ValueDistance between A to B 20 mDistance between B to C 15 mDistance between No to B 8 mLength of cable joining A and Q 15 mLength of cable joining B and Q 13 mLength of cable joining C and Q 11 mDistance between No and Q 13.3 mIf Q is above ceiling, distance ≈ 17 m
Note: This is part of the process of a camera targeting afootball/baseball in a stadium or laser targeting cancer or . . .
2.21 †††††††††††††Cable length to keep a window-washer’s beam stationary and horizontal.A beam B is attached to the roof of a building N by two relatively light (massless) cables A and C.Cable A attaches to the roof at point No of N and to the beam at point Bo of B.Cable C attaches to the roof at point NC of N and to the beam at point BC of B.No, Bo, Bcm, BC , NC are all in the same vertical plane. Bcm (center of mass of beam/workers) is LB
4from Bo.
Description Symbol Type Value
Distance between No and NC LN Constant 15 mDistance between Bo and BC LB Constant 7 m
Length of cable A LA Constant 7 m
Length of cable C LC Constant ? m
Determine LC so the beam stays horizontal.Result: LC = 9 m
No N
Bo
BBcm
LC
A CNc
Bc
LA
LN
LB
Demo with a meter stick and two strings.
Stumped? www.MotionGenesis.com ⇒ Textbooks ⇒ Resources
If LB = LN , intuition/analysis predicts LC = LA (vertical cables), independent of Bcm’s location between Bo and BC .
2.22 Optional: Draw the free-body diagram (FBD) for each object below.A C
Q
No
1520
15 1311
Note: The floor is horizontal, the walls are vertical.
B
8 10 kg
10 kg
T
C
W
N
B
θ
BN
rR
θ
PFP
B
Q
O
N
h
d
L
L
Bcm
Particle Q Top block Bottom pulley Rolling spool B Bureau B Entire systemHw 2.20 Hw 16.12 Hw 16.14 Hw 17.12 Hw 17.8 Hw 15.16
2Hint: See Homework 1.34 or Section 3.3. Introduce whatever identifiers facilitate your work.Although nonlinear algebraic equations are usually solved with a computer, these can also be solved “by-hand”.Solution at www.MotionGenesis.com. Alternatively, www.WolframAlpha.com solves sets of nonlinear equations, e.g., typeSolve x^2 + (-20+z)^2 + (-8+y)^2 = 225, x^2 + z^2 + (-8+y)^2 = 169, z^2 + (-15+x)^2 + (-8+y)^2 = 121
Copyright c© 1992-2020 Paul Mitiguy. All rights reserved. 312 Homework 2: Vectors with basis